大型矿用挖掘机工作装置仿真
基于SimMechanics的挖掘机工作装置运动仿真分析
31铲・装・运本栏目编辑 严 瑾第 41 卷 2013 年第 2 期基于 SimMechanics 的挖掘机工作装置运动仿真分析白鹏伟,史青录,程结结,吴正明,钟 飞太原科技大学机械工程学院 山西太原 030024摘要:为了查找和检验挖掘机工作装置设计方案的问题与缺陷,利用 SimMechanics 工具箱对挖掘机工作装置作业过程进行运动仿真。
通过仿真快速绘制出包络图并验证其工作尺寸参数,使设计人员在设计阶段就可以判断设计方案的合理性。
关键词:SimMechanics;工作装置;包络图;运动仿真中图分类号:TU621 文献标志码:A 文章编号:1001-3954(2013)02-0031-04Simulation and analysis on motion of excavator manipulatorbased on SimMechanicsBAI Pengwei ,SHI Qinglu ,CHENG Jiejie ,WU Zhengming ,ZHONG FeiSchool of Mechnical Engineering, Taiyuan University of Science & Technology, Taiyuan 030024, Shanxi, ChinaAbstract :In order to find out the problems and defects in the design scheme of excavator manipulator,SimMechanics toolbox was used to simulate the motion of the excavator manipulator. After the envelop diagram being plotted rapidly through simulation, the operating parameters were verified. The method could make it possible for designers to judge the reasonableness of design scheme during designing process.Keywords :SimMechanics; manipulator; envelope diagram; motion simulation作者简介:白鹏伟,男,1986 年出生,硕士研究生,主要研究方向为机械与车辆动力学。
基于Matlab的挖掘机工作装置动力学建模与仿真
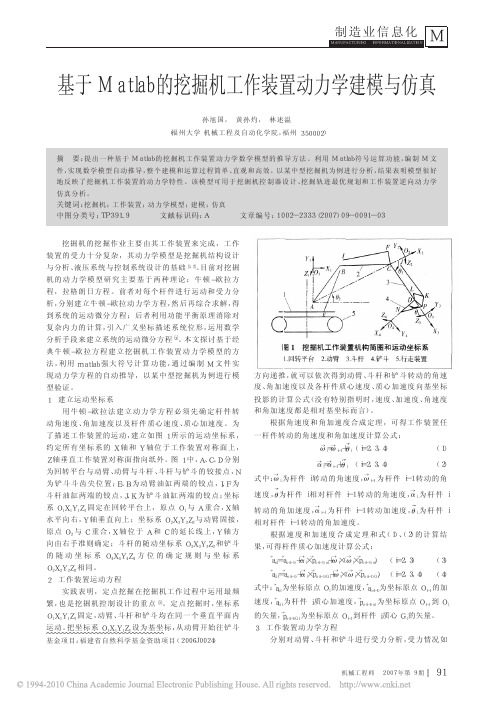
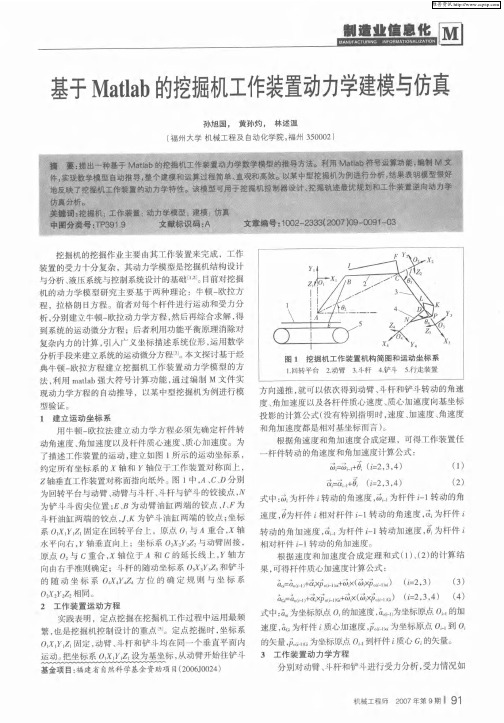
Y1Z1O1X1FIY2O2X2Z2JBAE15234Z4NX4Y4O4Z3Y3O3X3KLDP!3!2图1挖掘机工作装置机构简图和运动坐标系1.回转平台2.动臂3.斗杆4.铲斗5.行走装置!4C→→基金项目:福建省自然科学基金资助项目(2006J0024)""""""""""""""""挖掘机的挖掘作业主要由其工作装置来完成,工作装置的受力十分复杂,其动力学模型是挖掘机结构设计与分析、液压系统与控制系统设计的基础[1,2]。
目前对挖掘机的动力学模型研究主要基于两种理论:牛顿-欧拉方程,拉格朗日方程。
前者对每个杆件进行运动和受力分析,分别建立牛顿-欧拉动力学方程,然后再综合求解,得到系统的运动微分方程;后者利用功能平衡原理消除对复杂内力的计算,引入广义坐标描述系统位形,运用数学分析手段来建立系统的运动微分方程[3]。
本文探讨基于经典牛顿-欧拉方程建立挖掘机工作装置动力学模型的方法,利用matlab强大符号计算功能,通过编制M文件实现动力学方程的自动推导,以某中型挖掘机为例进行模型验证。
1建立运动坐标系用牛顿-欧拉法建立动力学方程必须先确定杆件转动角速度、角加速度以及杆件质心速度、质心加速度。
为了描述工作装置的运动,建立如图1所示的运动坐标系,约定所有坐标系的X轴和Y轴位于工作装置对称面上,Z轴垂直工作装置对称面指向纸外。
图1中,A、C、D分别为回转平台与动臂、动臂与斗杆、斗杆与铲斗的铰接点,N为铲斗斗齿尖位置;E、B为动臂油缸两端的铰点,I、F为斗杆油缸两端的铰点,J、K为铲斗油缸两端的铰点;坐标系O1X1Y1Z1固定在回转平台上,原点O1与A重合,X轴水平向右,Y轴垂直向上;坐标系O2X2Y2Z2与动臂固接,原点O2与C重合,X轴位于A和C的延长线上,Y轴方向由右手准则确定;斗杆的随动坐标系O3X3Y3Z3和铲斗的随动坐标系O4X4Y4Z4方位的确定规则与坐标系O2X2Y2Z2相同。
基于ADAMS的液压挖掘机工作装置仿真研究

s i z e a n d m o t i o n t r a j e c t o r y o f t h e e x c a v a t o r w e r e o b t a i n e d , mo r e o v e r , he t d i s p l a c e m e n t c u  ̄e s o f t h e e x c a v a t o r b u c k e t a n d b e a r i n g f o r c e
t e d i n t o t h e AD AMS t o b u i l d v i r t u l a p r o t o t y p e mo d e l o f t h e e x c a v a t o r .By u s i n g ADAMS s i mu l a t i o n f u n c t i o n,t h e s e q u e n t i a l o p e r a t i n g
mo d e a n d t h e c o mp o u n d a c t i o n o f t h e e x c a v a t o r w e r e s i mu l a t e d k i n e ma t i c ll a y a n d d y n a mi c a l l y .T h r o u g h s i mu l a t i o n, t h e ma i n o p e r a t i o n s
2 0 1 3年 1 1 月
机床 与液压
M ACHI NE T 0OL & HYDRAUL I CS
No v
Vo 1 . 41 No . 21
DO I :1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1—3 8 8 1 . 2 0 1 3 . 2 1 . 0 3 6
大型矿用正铲液压挖掘机水平推压特性联合仿真

大型矿用正铲液压挖掘机水平推压特性联合仿真朱小晶;权龙;王新中;吕晓林;李光【摘要】The method of electro-hydraulic proportional controlling means matched by pump valve compound flow rate was proposed to achieve flat-pushing while designing the national largest face-shovel hydraulic excavator with the bucket capacity of 15 m and machine weigh of 260 t. The ratio of hydraulic cylinders' flow rate was ascertained by computer coordinate control during the flat-pushing process, the co-simulation research of dynamics of mechanical systems and hydraulic system in developing mining excavators' flat-pushing process was carried out by using the software of ADAMS and AMESim. The displacement, velocity and pressure of arm mining process in various hydraulic cylinder on the small excavator were validated by the experiment. It is confirmed that co-simulation research methods can accurately simulate the practical working environment of excavator.%在设计目前国内最大(斗容量为15 m3,质量260 t)的正铲挖掘机中,提出采用泵阀复合流量匹配的电液比例控制方法实现水平推压.通过计算机协调的比值关系确定平推中供给各液压缸的流量,采用ADAMS和AMESim软件,对设计的矿用挖掘机水平推压过程进行机械系统动力学与液压系统的联合仿真研究.在小型挖掘机上对斗杆挖掘过程各个液压缸的位移、速度和压力进行测试试验验证,结果表明联合仿真研究能够较准确地模拟挖掘机的真实工作环境.【期刊名称】《农业机械学报》【年(卷),期】2011(042)005【总页数】5页(P30-34)【关键词】正铲挖掘机;水平推压;特性;联合仿真【作者】朱小晶;权龙;王新中;吕晓林;李光【作者单位】太原理工大学机械电子工程研究所,太原030024;太原理工大学机械电子工程研究所,太原030024;太原重工股份有限公司技术中心,太原030024;太原重工股份有限公司技术中心,太原030024;太原重工股份有限公司技术中心,太原030024【正文语种】中文【中图分类】TH137.9;TD422.2引言目前国内斗容量大于 12m3的大吨位液压挖掘机装备还处于空白,所用机型完全依赖进口[1]。
基于VRML的液压挖掘机工作装置运动仿真

V M R L对 液压挖掘机工作装置运动进行仿真的方法。利用 Sl Wok od rs建立液压挖掘机 工作装置静 态模 型, i 结
合 各 部件 之 间 的 父子 关 系和 几何 关 系, 写 V ML程序 , 成挖 掘 机 工作 装 置 仿 真 系统 。此 方 法对 挖 掘 机 设 编 R 完
wo k d v c fh d a l x a ao sd v lp d b s d o r e ie o y r ui e c v tri e eo e a e n VRML c .T e sai i n in lmo e e h d a l x a ao S h tt dme s a d lo t y r u i e c v tri c o f h c
计水平的提 高具有 重要的理论 意义和 实际价值。
关 键词 : R ; 压挖 掘 机 ; V ML 液 工作 装 置 ; 互性 交
中图分 类号 : U 2 ’ 6 1哪 9 . r 19
文献标识码 : A
文章编号 :0 6— 44 2 1 )2一 16一 4 10 4 1 (0 0 0 O 0 o
d sg e sn e S l W o k ot r .C mbn n h e mer ea o s o h x a a o a t a d i a e d s n rl - e in d u i g t o i h d r s sf wae o i ig t e g o t r lt n ft e e c v tr p r t f t r a o ea y i sn s h n
Ke r s y wo d :VRML;e c v tr o k d vc ;i tr cin x a ao ;w r e ie n ea t o
基于ADAMS的挖掘机工作装置的仿真与优化设计概要

第30卷第3期2009年3月煤矿机械CoalM ine MachineryVol.30No.3Mar.2009基于ADA MS的挖掘机工作装置的仿真与优化设计潘玉安1,程洪涛2,姜迪友2,梁刚3,聂陶荪1(1.景德镇陶瓷学院机电工程学院,江西景德镇333403;2.江西蓝天学院(瑶湖校区,南昌330098;3.景德镇高等专科学校,江西景德镇333000摘要:建立了该类反铲挖掘机工作装置虚拟样机的ADAMS仿真模型,基于虚拟样机技术和广义简约梯度法以铲斗、斗杆和动臂油缸的工作压力最小为目标,对铲斗机构、斗杆机构、动臂机构的构造点进行了仿真优化设计。
仿真结果表明,在规定的约束条件下,工作装置达到了优化设计的目的。
关键词:ADAMS;挖掘机;工作装置;仿真中图分类号:T D422.2文献标志码:A文章编号:1003-0794(200903-0015-03Based on ADA MS of W orki n g Equi p ment ofExcavator Devi ce Si m ul ati on and Desi gn Opti m i zati onPAN Y u-an1,CHENG Hong-t ao2,J I ANG D i-you2,L I ANG Gang3,N I E Tao-sun1(1.Mechatr onics College,J ingdezhen Cera m ic I nstitute,J ingdezhen333403,China;2.J iangxi B lue Sky University Yaohu B ranch,Nanchang330098,China;3.J ingdezhen Comp rehensive College,J ingdezhen333000,ChinaAbstract:Backhoe work device of the class virtual p r ot otype ADAMS si m ulati on mode has been estab2 lished.The m ini m u m target which bucket and ar m and boom oil cylinder of working p ressure based on virtual p r ot oyp ing technol ogy and generalizded reduced gradient method.Op ti m ized the bucket mecha2 nis m,ar m mechanis m and boom mechanis m of the constructi on point.Under the regulati ons of constraint conditi ons,the si m ulati on results show that it successfully.Key words:ADAMS;excavat or;working equi pment;si m ulati on0引言单斗挖掘机是一种应用广泛的工程机械。
大型正铲液压挖掘机工作装置虚拟样机研究
l0 0 7 B E 5 0
维普资讯
鼎} 露 ; 。 瓣 秘
撼
专 究
。 。
S E IL蠡 § P CA 爨 嚣 辩
j l l
大 型 正铲 液 压 挖 掘 机 工 作 装 置 虚 拟样 机研 究
白玉 琳 ,陈
( 重庆 大学
进 ,李世 六 ,侯
沂
大型 正铲液压 挖掘机 的工作装置是 由回转 机 构 、 动 臂 、斗杆 、铲 斗等 多个构件组 成 பைடு நூலகம்串联开链 机 构 , 具有 构造 简单 、操作 方 便 、运动 灵 活 等优 点 ,得 到
越来 越广泛 的应 用 。大型 正铲 液 压挖 掘 机过 去 基 本
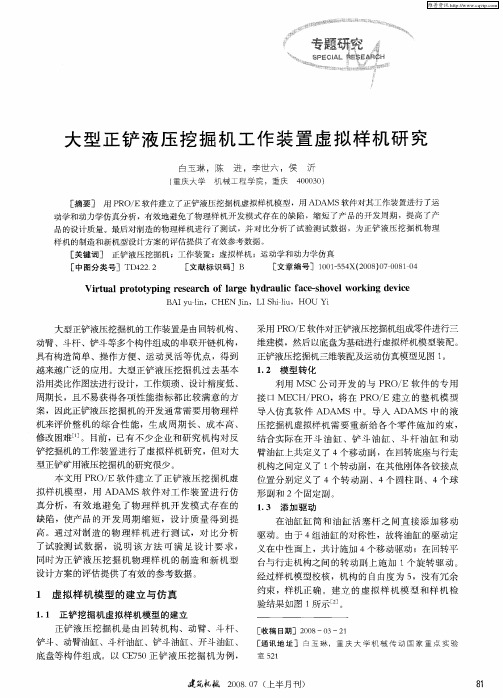
采用 P O E软件对 正铲 液压挖掘 机组成零件进 行三 R / 维建模 ,然后 以底盘 为基础进行 虚拟样 机模 型装配 。 正铲液压挖 掘机三维装 配及运动仿 真模 型见 图 1 。
经过样机模型校核 ,机构的 自由度为 5 ,没有冗余 约束 ,样机正确 。建立 的虚拟样机模 型和样 机检 验结 果如 图 1 所示 [ 。 2 ]
[ 收稿 日期]2 0 —0 0 8 3—2 1 [ 通讯 地 址] 白玉 琳 ,重 庆 大 学 机 械 传 动 国家 重 点 实验
室 51 2
1 虚 拟 样 机模 型 的 建 立 与仿 真
1 1 正铲 挖掘 机虚 拟样 机模 型 的建 立 .
正铲 液 压 挖 掘 机 是 由 回转 机 构 、动 臂 、斗 杆 、 铲斗 、动 臂油缸 、斗 杆油缸 、铲 斗 油缸 、开斗油 缸 、 底盘等 构 件组 成 。以 C V 0正铲 液 压 挖 掘 机 为 例 , ES
1 2 模 型转 化 .
基于Matlab的挖掘机工作装置动力学建模与仿真
程:
= + + ∑
’
( ,, 2 4 3)
) +
() 7
() 8
M ( + ( ) ‰ F{ l G / ) = “ | x 1  ̄i x oI -
(= , 。 ) 2 34
式 中: 为杆 件 i1 F - 对杆 件 i 约束 力 , , 的 表示杆 件 【 i + 1对杆件 i 约束力 ; ,为杆件 ( 1对杆 件 i 的约 束 ) 的 i ) - 上 力矩 , 为杆件 ( 1对杆 件 i 的约 束力 矩 , ) + 上 为
P l X (尸 F 广P lx — r K 广m + o 2 l X 0 + oJ ( 【 2 - -
偶 、 与
的作用力, 与 为斗杆油缸作用在动臂和斗杆上的作
用力 , 为铲 斗 油缸 对 斗杆 的 作用 力 , 为摇 臂对 斗 杆 凡 的作 用力 , 为连 杆对 铲斗 的作 用 力 , 、 构成 为 凡 凡 、
、
( 一 一 m
P+ IP l尸2 F ( )尸 I l x ( b × 1 x + + F 0)
的正 向为逆 时针方 向 , 与 :为一对 作 用 反力 为一 对 作用 反 力偶 ; 。 动臂 油缸 对 动 臂 为
M2一 3 l P x — ) Pl 『P I = 2 + 2o ( m + + ox B ox l
式 中 : 为杆件 i 的惯 性 力 , 为 杆件 i 性 力矩 , 杆 惯 m为 件 i 量 , 为 杆件 i 质 J r f 的转 动 惯量 , 、 、 a 由式 ( )( ) 1 、2 、 ( ) 算得 出 。 4计 根 据受 力 分析 图 ,列 出任 一杆 件 的力 和力 矩平 衡 方
1 3 6 g・ I ,= 2 k I , = 5 k ‘ I, = 5 6 g 5 6 k I ,1 8 6 g・I,4 2 2 g I m2 1 6 k , T T T
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本文结合的电铲挖掘机斗容为 3 5m ,选其 动臂 内部为箱型结构 ,斗杆内部结构也为箱型结
收稿 日期 :20.75 0 60 —
作者简介:马 乐(9 1) 18 .,女,吉林长春人 ,在读硕士,研究方向为机械系统仿真设计,(- i ma 18 @s agm 巨mal l 9 1 i . ) e n o
t e d n mi s a d k n ma i s o e w o k n q i me ta e s u i d d rn h u lwo k p o e s h y a c n i e tc f t r i g e u p n r t d e u i g t e f l h r rc s, a d t e f r e o o o o e t d n m i s a e a a y e s e i ly h o e n i l t n n h o c n s me c mp n n s y a c r n l z d e p c a l .T e m d la d smu a i o me h d c n h l h t d t e c a i a y t m. t o a ep t es u y i o h rme h n c l s e n s
( l g f c a i a S i& E g , in U i C a g h nJl 3 0 5 C ia Col eo h nc l c. e Ma n .Jl n v, h n c u i n 1 0 2 , h n ) i i
Ab t a t T ewo k n q i me t f e v x a a o t l c r cs o e ss mu a e . c r i g s r c : h r i g e u p n a y e c v t rwi e e ti h v l i lt d Ac o d n o h h i
建立其工作装置模型 ,并对作业过程进行动 力学和运动 学仿真研 究,详 细分析各部件在工作 过程 中受力状 况.论文的建模及 分析方法对于其它机械 系统 的仿 真分析 具有理论参考意 义.
关 键词 :工作 装 置 ;MS a ;仿 真 CAd ms 中 图分 类 号 :T 2 ; P 9 . D4 2 T 3 1 9 文 献标 志码 :A
体 建模 能力 较弱 .而 实际 上 ,r/nier MS PoE gne 和 C
A a s有专 门的模型接 口,可 以将 Po n i e dm r/ g er E n 中建立的实体模型无缝导人 MS dm 中. CA a s
量减少产品开发费用和成本 ,明显提高产品质量 和系统性能 ,获得最优化和创新 的设计产品. 本
大 型矿 用挖 掘机 工作装 置 仿 真
马 乐 ,赵 克 利 ,翟 洪 岩
(吉林 大学 机械 科 学与 工程 学院 ,吉林 长 春 10 2 3 0 2)
摘 要 :对 大型 电铲 矿 用挖 掘 机 的 工作 装 置 进 行 仿 真 ,结 合 其 实 际作 业 特 点 应 用 MS a CAd ms
,● U 』 n On 、m ’ t0 I i 1 ● al
r i u pm e to k ngEq i n f
H e v i ng Ex a a o a y M ni c v t r
M A , Le ZHA0 l, Kei ZHAIHo g a n yn
维普资讯
第 1 5卷 增刊
20 06年 9月
文章 编 号 : 10 —8 120 ) 10 6 —3 0 60 7 (0 6S —3 10
计 算 机 辅 助 工 程
C0M P UTER AI DED NGI E NEE NG RI
V 1 5S p l o .1 u p Sp 2 0 e.06
较优秀的有美 国MS C公司开发 的MS dm 软 CA a s 件. 运用虚拟样机技术 ,可 以大大简化机械产品 的设计开发过程 ,大幅度缩短产品开发周期 , 大
动臂及斗杆的力学性能 ,在仿真模型中,为减少 计算量 ,将斗齿 、斗前臂 、斗后臂 、 斗底装置看
成 一个 整体 .
MS dms C A a 是专业的动力学分析软件 ,实
t te o aat i i,h d l fh okn q im n i e ilh d yMS d m . hn o h bc rc r t te j h e sc mo e o e ri eup ets sbi e CA a s T e t w g t s b
Ke r s wo k n q i me t M S a ; sn lto ywo d : r ig e u p n ; C Ad ms im ai n源自O 引 — C . k ,
过程 中的动力学及运动学进行仿真分析
国内外已有很多企业及研究机构对挖掘机的
1 仿 真 模 型 的 建 立
在机械式电铲挖掘机工作装置 中, 斗的结 铲
构相对动臂 、斗杆 比较复杂. 由于本文主要分析
工作装置进行 了仿真分析 , 大多数是针对液压 但
式挖掘机 ,而对于大型尤其是斗容大于 3 0 m 的
机械式电铲挖掘机进行动力学及运动学计算机仿 真分析 的却很少.目前 ,国际上已出现成熟使用 的功能化虚拟设计及开发的工程应用软件 ,其中
维普资讯
32 6
计 算 机 辅 助 工 程
20 0 6年