三维激光HDS3000扫描仪点位精度分析与研究
浅谈三维激光扫描仪的精度

浅谈三维激光扫描仪的精度从刚开始接触三维激光扫描仪开始,听的最多的就是关于三维激光扫描仪的精度问题,包括夸张,包括贬低,包括困惑。
三维激光扫描仪作为⼀个三维空间量测设备,最⼤的特点是快速海量空间点采集。
⼀个是数据采集快,现在主流的脉冲和相位式扫描仪速度从每秒⼏万点,到每秒上百万点;另外⼀个是空间三维的完整量测,因为测量的点间距可以很⼩(从⼏⼗毫⽶到⼀个毫⽶以下),⼏乎创建了基于扫描仪站位的完整的空间视图(往往脚架以下的部位不在视场范围内,从⽽扫描不到),也就是测量现场考虑到或没考虑到的对象都完整记录下来。
三维激光扫描仪的测量原理当然是激光测距,有脉冲和相位两种形式之分。
但核⼼部件--激光传感器的⼯作⽅式与全站仪的激光传感器有些差异,因此测距精度最⾼也就在1-2毫⽶,随着与被测对象距离加⼤,精度还要差,可能到5毫⽶以上甚⾄20-30毫⽶。
当然有的时候精度也与被测对象的表⾯材质有关系,例如颜⾊,光洁度等。
⼈们平时经常争议说某某三维激光扫描项⽬精度出了⽐较⼤的问题,数据经过验证后相差⼀个拳头⼤⼩,甚⾄多出来⼀个胳膊的长度。
根据我的⼀些详细分析和检查,发现此类问题不是三维激光扫描仪造成的,造成这类问题的主要原因有两个:1,现场扫描操作过程的问题。
例如使⽤的标靶被移动了,扫描过程中扫描仪被碰了,甚⾄某些认为静⽌的被测对象在扫描期间出现了移动(⼤风吹动,⼈为挪动等)。
这样导致了扫描的最原始数据有问题,导致数据不准确。
2,数据拼接处理的问题。
实际上这类问题⽐较常见,主要是数据拼接处理⼈员的责任⼼不够或经验缺乏导致的。
数据拼接处理的⽅法很多,在这⾥就不详细⼀⼀介绍了,以后有时间可以与⼤家⼀起再深⼊探讨。
这⾥只想举例说⼏种情况:1)过分依赖标靶,⽽标靶在作业过程中发⽣了移动,或者标靶布设不合理(短基线控制⼤场景,在⾼度变化⽐较⼤的空间标靶简单布设在⼀个平⾯等);2)⼈为错误,选错标靶或选错特征,包括在使⽤点云特征拼接时,选择了数据质量不好的位置进⾏等;3)没有采⽤过约束或闭合,导致误差没有分散,⽽被累计。
三维激光扫描仪系统精度评定与误差修正试验研究

表 2 测距误差方差及贡献率分析 Table 2 Analysis of variance and contribution rate of ranging error
因素 偏差平方和 自由度 均方 F 值 显著性
临界值 贡献率(/ %)
A B C 误差 总和
1.389 4.029 0.329 0.102 5.849
第 58 卷第 3 期 (总第 398 期) , 2021 年 6 月出版 169
Vol.58, No.3 (Total No.398), Jun.2021
现代隧道技术
MODERN TUNNELLING TECHNOLOGY
三维激光扫描仪系统精度评定与误差修正试验研究
基坑变形以及建筑物沉降等工程变形监测领域,并 且与传统监测手段相比,快速获取沉降面点云数据 的扫描技术突破了传统的单点测量方法,为工程中 的变形监测,尤其是为监测效率、精度要求高、周边 环境条件复杂的城市地铁隧道沉降监测提供一种新 的测量方案。
Vol.58, No.3 (Total No.398), Jun.2021
三维激光扫描仪系统精度评定与误差修正试验研究
现代隧道技术
MODERN TUNNELLING TECHNOLOGY
3.2 试验分析
(1)测量误差方差及贡献率分析 方差及贡献率分析可确定出单个因素的影响大 小及顺序,确定了主要影响因素后,针对某个明确目 标,在实测时就可重点调整和控制[19];本试验测距及 高程误差方差及各因素水平贡献率结果见表 2、表 3。 从表 2 和表 3 中分析表明:因素 B(水平测距)、 因素 A(模拟车载)对测距误差和高程误差的影响程 度均为高度显著,因素 C(测量环境)对测距误差的 影响程度为不显著,对高程误差的影响高度显著,可 见各因素水平对扫描仪误差均有一定程度的影响; 从贡献率方面来看,因素 B 对误差的贡献率最大,其 次为因素 A,因素 C 最低,即影响误差因素的顺序均 为水平测距>模拟车载>测量环境,并且因素 A 与
HDS3000--3D激光扫描仪讲解

HDS3000--3D激光扫描仪The Leica HDS3000, the first "surveyor-friendly" 3D laser scanner, is the flagship of Leica's HDS product family, makinghigh- definition field data capture more efficient and easier for a wider range of surveying and engineering projects.There aremany characteristics of the HDS3000 that set it apart from other instruments in its class, including:Maximum 360° x 270°field-of -view Unique dual-window design Fully selectable field-of-view and scan density Bore-sighted digital camera for automatically calibrated photo overlays <6 mm spot size @ 50 m 6 mm positional accuracy @ 50 m Height-of-instru ment(H.I.) measurement Setup over survey point Flexible "hot-swap" power supply system QuickScan? buttonWith the Leica HDS 3000, high-definition surveying has never been easier and friendlier for surveyors and measurement professionals. For example, it supports standard surveying procedures, such as instrument setup over a known or assumed survey point, height-of-instrument measurement, and instrument orientation. These same features are also valuable for automated geo-referencing of captured data to local coordinate systems. The new QuickScan mode allows users to quickly and easily define the extents of the scanning scene by simply pushing a button on the scanner. Efficient battery swapping and improved weight/portability allows for even more flexible and friendlier field operations.Just as significant as its ease-of-use, the HDS3000 takes the industry-leading accuracy (6mm at 50m)and versatility of its popular predecessor, the Cyrax? 2500, to the next level of productivity. It combines SmartScan Technology?with amaximum360° horizontal field-of-view and an equally impressiv maximum 270° vertical FOV. In a nutshell, the Leica HDS3000 is a versatile, multi-purpose scanner that combines high efficiency with high accuracy for a broad range of civil engineering,plant and building projects.。
三维激光扫描仪及其测量误差影响因素分析
三维激光扫描仪及其测量误差影响因素分析摘要:最近几年三维激光扫描仪在我国的测绘领域的应用十分广泛,使测绘方面做到了从点到面测量的突破,使测绘的效率显著提高,并且测量出来的数据较为准确,且不受时间、空间的约束。
三维激光扫描是通过对测绘地点或事物扫描构成密集的点,然后激光扫描仪对不同位置光的反射率进行测绘对象的三维建模,在三维扫描仪的测绘中,影响测量数据的因素有很多,通常将造成误差的原因分为两大类:系统误差和偶然误差,所造成的误差又分为仪器误差、环境误差、软件算法误差、操作误差等。
本文从三维激光扫描仪的工作原理、造成误差的原因和减小测量误差三个方面进行了论述。
关键词:三维激光扫描仪;测量误差;影响因素前言:三维激光扫描仪可以对被测量的物体进行快速的激光扫描,而且得到的三维坐标点的数据是非常准确的,然后仪器将数据通过相关的算法的计算,过滤掉无关的干扰数据,最后将处理后的三维坐标点的数据信息进行实景还原,是现如今应用效果较好的测绘技术,它打破了传统的单点测量,给各种测绘工程带来了极大的便利。
1.三维激光扫描仪的工作原理三维激光扫描仪在近几年的各种测量中运用较为广泛。
三维激光扫描仪的核心技术包括激光反射镜、激光自适应焦距控制单元、CDD技术、光机电自动传感装置以及激光发射器。
三维激光扫描仪是利用激光测距的原理,通过记录被测物体表面大量的密集的点的三维坐标、反射率和纹理等信息,可快速复制建模出被测目标的三维模型的线、面、体等各种图形数据。
1.影响三维激光扫描仪测量精度的因素在实际测绘操作中,影响三维激光扫描的因素有很多,要想减少或避免测量误差的影响,就必须先了解造成误差的原因,以下是对几种测量误差的分析,2.1仪器误差三维激光扫描仪本身性能的缺陷是影响测量精度的因素之一。
在实际操作测绘中,仪器误差的出现可以分为两个方面:第一是测量距离方面,这方面的误差在测量数据中的表现形式是有显著的周期性的,造成这种误差的原因有两种:一种是因为仪器性能不全面,或者存在一定的缺陷;另一种原因是操作者在操作时的不合理,造成的误差。
三维激光扫描仪点位精度检测研究

角度分辨率 0 . 0 0 2 5 。
三维激光扫描仪的原始观测数据一般包括激光光 束的水平角 、 垂直角 、 距离值 、 反射强度 , 如配备有数码
收稿 日期 : 2 O 1 3 —O 5 —2 9
温度范 围
0 ℃一 4 0  ̄ C( 使 用) ; 一 I O  ̄ C~ 5 0 %( 存放 )
2 0 1 3年 1 2月
城
市
勘
测
பைடு நூலகம்
De e . 2 01 3
第 6期
文章编 号 : 1 6 7 2 — 8 2 6 2 ( 2 0 1 3 ) 0 6 — 7 9 一 o 3
U r b a n Ge o t e c h n i c a l I n v e s t i g a t i o n& S u r v e y i n g
的三维坐标数据都是直接采集的 目标 真实位置数据 ,
进 而 使得 供后 处 理 的数据 真实 可靠 。三维 激光 扫 描 技
术正 因为其获取速度快 、 精度高 、 实时性强、 全数字化
等特点 , 并 且 能够 制 作 形 式 多 样 的数 字 产 品 等 突 出优 势¨ 。激光 扫 描测 量仪 器 的精度 也 影 响三维 点 云模 型 的建 立和 应用 , 因此 地 面 三 维 激 光 扫 描 仪 的检 校 与 精
相机 , 通过后期处理可 匹配色彩信息。通过数据处理
后 的数 据 由 大 量 离 散 的 点 组 成 , 称为点云 , 包 含 信 息
有: 点位坐标 、 反射 强度和颜 色信息 ( 或灰度 信息 ) 。 通 过对 点 云数 据 编辑 构 建 三 维模 型 , 以 实 现数 据 展 示
和 应用 。在 数据 采 集 和 处 理 过程 中 主要 的误 差 源 有 : 点 位误 差 ( 系 统 误 差 和偶 然 误 差 ) 和 建 模 误 差 。本 文 通 过对 点云 精度 和 模 型 精 度 的分 析 , 分 析 总结 通 过 三 维 激光 扫描 仪所 获得 的成 果 的精度 情况 。
三维激光扫描仪建模精度分析
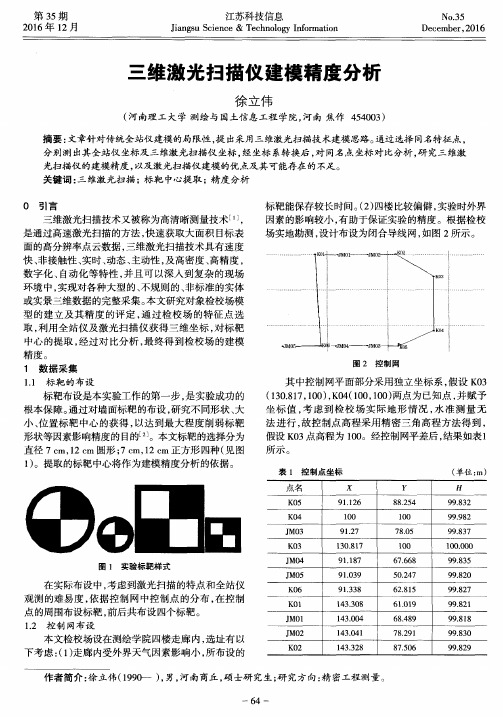
表 1 控制点坐标 点 名
KO 5
K0 4
( 单位 : m) l , H
9 9 . 8 3 2
99. 982
91 . 1 2 6
1 00
8 8 . 2 5 4
l 00
J M0 3
K0 3
9 1 - 2 7
1 3 0 . 8 1 7
【 单位 : r l 1 ) l ,
8 5. 1 05 1 4 4. 1 4l
表 2 标 靶 中心 坐 标 序 号
l
Z
l 02. 098
2
3 4
7 8 . 0 5
1 o 0
9 9 . 8 3 7
1 o o . o 0 0
图 M0 5
9 1 . 1 8 7
9 1 . 0 3 9
91 . 3 38
6 7 . 6 6 8
5 0 . 2 4 7
6 2. 81 5
1 4 3 . 3 2 8
7 8 . 2 91
8 7 . 5 0 6
9 9 . 8 3 0
9 9 . 8 2 9
下考虑 : ( 1 ) 走廊 内受外界天气因素影响小 , 所布设 的
作 者简 介 : 徐 立伟 ( 1 9 9 0 - .) , 男, 河 南 商丘 , 硕 士研 究生 ; 研究方向: 精 密工程 测量 。
其 中控制 网平面部分采用独立坐标系 , 假设 K 0 3 ( 1 3 0 . 8 1 7 , 1 0 0 ) , K 0 4 ( 1 0 0 , 1 0 0 ) 两点 为 已知 点 , 并 赋 予 坐标值 , 考 虑到 检校场实 际地形情 况 , 水 准 测 量 无 法进行 , 故控制点高程采用精密三角高程方法得到 , 假设 K 0 3 点高程为 1 0 0 。经控制网平差后 , 结果如表 1
三维激光扫描仪在地铁竣工测量中应用及精度研究

三维激光扫描仪在地铁竣工测量中应用及精度研究摘要:地铁完成土建施工后,验收测量团队须对区间、车站等进行准确的竣工验收。
随着地铁施工难度的提升,传统测量方式已经无法满足竣工测量的要求,且工程量较大,处理过程较为复杂,工作效率低。
因此,验收团队必须加大对竣工测量的重视程度,合理引入三维激光扫描仪等多种先进设备,构建地铁车站三维模型,科学处理地铁车站的空间,提升测量数据的精度与准确性,保障测量数据可满足地铁施工的要求。
因此,本文结合广佛线二期,重点研究地铁竣工测量中应用三维激光扫描仪的方式。
关键词:三维激光扫描仪;地铁;测量方式;精度地铁完成土建工程施工后,须进行严密的竣工测量,其主要任务在于测量已竣工的地下构筑物,收集好相关测量数据,将其与设计数据比较,整理成相应的测量成果,为相关部门提供综合分析的数据参考[1]。
同时,竣工测量的范围包括车站空间尺寸、隧道区域二衬断面。
就传统测量方式而言,通常应用的测量设备有测距仪、全站仪等[2],能够独立采集不同车站点的三维坐标,施工人员通过软件绘制空间、断面的尺寸图,与设计数据比对后,分析地铁土建施工工程的质量,检查其是否达到设计要求,但此种测量方式的工作量较大。
1.三维激光扫描仪数据收集方式三维激光扫描仪是现代化科学技术飞速发展的产物,属于新型测量设备,是对单点测量技术的发展与改造,直接简化了外业测量的程序,该设备以非接触式激光测量技术为基础,主要形式为点云,通过收集、保存空间物体表面已有的三维几何信息、纹理数据。
同时,三维激光扫描仪分为四个系统,一是扫描系统,二是测距系统,三是仪器内部校正等系统、集成CCD数字摄影,其运行原理为:设备对物体发射出激光,收集激光发射时间与返回时间,计算出物体与扫描仪之间的几何距离,结合垂直、水平两个方向,计算出角距值与点位准确三维坐标,借由储存设备记录完整数据,经过专业处理后建模,创建物体空间三维模型。
本文研究选择广佛线二期世纪莲车站与世纪莲到东平新城区间竣工测量工程为例,引入三维激光扫描仪,观察设备的应用方式。
三维激光扫描仪课件讲解三维激光扫描仪原理三维激光扫描仪案例分析

三维激光扫描仪应用于变形监测
• 优势: • 1、高效率 • 2、数据精细 • 3、与近景摄影测量相比 • 4、方便建立模型 • 缺点: • 1、目前价格高
监测对象例子
• 多发滑坡崩塌事故的某露天矿的高 陡边坡需要变形监测。
• 采用三维激光扫描仪监测变形,需 要解决的难题是:如何布设测站和 控制标靶和目标球;如何统一各次 扫描的坐标系统;如何提取变形信 息;变形监测误差的估算;如何显 示变形数据等。
Cyrax扫描仪的控制和操作
• 根据扫描图派生2D线画图 观察扫描仪所在位置 多幅扫描图的整体拼接 采用平面或球面建模自动实施整体纠正 对扫描点自动实施干扰检查并进行可视化 的目标设计 根据格网点生成等高线 按照影像数据文件格式存储瞬时图 根据点云生成剖面图、平面图和断面图
பைடு நூலகம்
Cyrax扫描仪的控制和操作
特性和功能1
• 通过选取线性矩形框来确定目标范围 任意选取水平方向和垂直方向的扫描密度 完全的“飞行旋转”,缩放和摇动,扫描影像的任意旋转,哪怕在扫 描的过程中也能做到。 给对象增加颜色和材料属性 影像存储/恢复 查看扫描仪的位置 智能化的3D模型输出 视频图象和扫描数据图象同时显示 3D标注可视化 客户许可证 扫描图象和影像的自动连接 多级undo/redo操作功能 扫描图自动排序 诊断信息 计算机辅助获取目标
Cyrax扫描仪的控制和操作
• 建模、可视化、查询和浏览工具 对云点图、感光图、VDB、网点图、渲染 图及3D模型可以实行“飞行旋转”、摇晃 和缩放以及自由旋转。 建立交互式的可视窗口
Cyrax扫描仪的控制和操作
• 测量和标注点云和模型的相关数据: 斜距 平距 高差 体积 表面积 坐标参考系统 由激光返回信号的强度生成彩色影像 在对象上添加颜色和材料 采用最合适的施工方式动态展现施工各个阶段3D模型 用户可设置质量检查方式 自动生成平面和柱面的切面 平面、柱面和球面的区域扩展 由3D模型派生2D图
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 引 言
三维激光 扫描技术是上世纪 9 年 代 中期 出现 的 0
2 三维 激 光 扫 描 仪 工作 原 理
本 文实验 采 用 L i e a HDS 0 0三 维 激 光 扫 描 c 30 仪( 性能 指标见 表 1 , ) 由激光 测距 系 统 、 激光 扫描 系 统及 内置 的与扫 描 仪 同轴 的 数码 相 机 组 成 , 可进 行 中远 程扫 描 。其 工作 原 理 是 : 先对 被 扫 描 目标 发 射
.
N E T l 200
m
高精度全 站仪
,
, ”
测 距 精度 为
。
平 面 点云 数据
,
a (0 6 r
+ 2 p p m × D ) 测 角精度 为 1
,
扫 描 目标 为
2 (a )
、
右 侧 为 提 取 中 心 点 后 的点 云 )
球心 坐 标
③ 河南工程学院 , 州 419) 郑 5 1 1
摘 要: 不同的实验条件下对三维激光扫描仪 的点位精度进行分析研究, 在 结果表 明扫描距离误差 随距 离的增 加 而增大 , 角度 、 反射面和环境 因素不是点位 中误 差的主要来源 , 点位 中误差主要由仪器本身引起 。
关 键 字 : 维激 光 扫 描 ; 位 精 度 ; 三 点 靶标 中 图分 类 号 : 2 5 P 1 文 献标 识 码 :A 文 章 编 号 :1 0 —3 7 ( 0 8 1 O 0 5 —0 o0 1 7 20 ) o 一 O3 5
直方 向的角值 , 然后实 时计算 被测 点 的三 维坐标 , 如
图1 示, 所 X在 横 向扫描 面 内, y在横 向扫描 面 内与
信息 。三维激光 扫描仪具有数据 获取速 度快 、 接触 不 性、 测量点分 布规 则 、 辨 率高 、 分 测量 范 围大 、 于携 便 带等优点 。随着 激光扫描技术 的发展及成 本 的降低 ,
性 能 指 标 激 光 波 长 视 场 角 光 斑
测 距 精 度
数 值
5 2 m 绿 光 3n 3 0×2 0 6。 7。 5m距离光斑小于 6 0 mm 士4 mm
实验研究 , 中包括距离 、 其 角度 、 环境( 温度 、 湿度 、 光照)
与反射面等。通 过对 目标物进 行多次 扫描 , 计算 点位
点 位 精 度
测 程
5 距 离 点位 测量 精 度 小 于 6 O米 mm
1 — 0 m —1 0
中误差等统计量 , 分析各因素对 点位精度的影 响。
收 稿 日 期 :0 8 O 一O 20 一 2 1 修 订 日期 :0 8 O — 2 20 一 3 8
扫 描 速 度
大 于 40 0 0点 / 秒
通讯作者 : 程效军
E malcj @ q .o - i:xt q cr j n
5 3
遥感信 息
日臣匝
3
3 1
数 据 获取 与处 理
.
距 离实验
距 离 实 验 是 将 扫 描 仪 得 到 的 平 距 数 据 与 高精 度
全站仪 得 到 的数 据 (视 为真 值) 比较 实 验 采 用
,
S
o
k k ia
F ih) 计算 被 测 点 与 扫 描 仪 的距 离 , 根 据 水 平 l t, g 再 方 向和垂 直方 向 的偏转 镜得 到激光 在水平 方 向和垂
心, 且测 量数据不 含属性 信 息 ; 三维 激光 扫 描技 术 而
则 恰好 弥 补 了传 统测 绘 的缺 点 , 够 快速 、 效 、 能 高 精 确、 全面地 获取 被测 目标表面 的空间点位 信息及 属性
■ 曩 应 用
遥 感信 息
三维激光 HD 3 0 S 0 0扫描仪 点位精度分析与研究
谢 瑞① , 敏 捷 ②, 效 军@, ~ 胡 程 张京 男①, 适① 周
( 同济大学土木学 院测量与 国土信息系 , ① 上海 20 9 ;② 上海船舶研究设计 院, 002 上海 2 0 3 ; 0 02
模、 考古研究及 医学等 各个领 域 。三维 激光扫描 仪获
取的数 据 由 大 量 离 散 的 点 组 成 , 为 点 云 ( o t 称 Pis n Co d , l )其属 性信 息主 要 由扫描 点 的点位 坐标 ( Y, u X,
图 1 扫 描仪 工 作 原 理
表 1 L i s 0 o激 光 扫 描 仪 性 能指 标 e aHD 3 O c
z , 强 度 (nes ቤተ መጻሕፍቲ ባይዱ 和灰 度信 息 ( G ) 部 分组 )反射 It i ) nt R B三
成。扫描 目标 的点 位误 差 由系 统误 差 和偶然 误 差构
成, 系统误差主要指仪器本 身带来 的误差 , 偶然误差 主 要有与 目标物体反射面有关 的误差 和外 界环境带来 的
误差等 。本文对可能影响扫描仪 点位精 度 的因素进行
三 维激 光 扫描 技术 的应 用越 来 越 广泛 , 如逆 向工 程 ( / I 快速成 型 ( ) 大 型工 业及 变 形监 测 、 ) I 、 三维 建
X 垂直 , Z垂直 于横 向扫描 面 。
Z
Z、
X c s c sz =s o 0 o o 】 S OOia , C S sn _ Z= s O Si n
基金项 目: 国防科科 委十一 五重点 项 目( 2 4 3 5 激光 扫描 仪检校 和作业 方法 研究) C 0o2 8 。 作者简 介 : 谢瑞 ( 9 O , , 南人 , 1 8 一) 女 河 博士生 , 讲师 , 研究方 向摄影测 量与遥 感 。
E malxu 8 @ h t i c r - i: imu 0 omal o . n
新 技术 , 与传统测 绘技术 相 比, 能 提供 大量 高精 度 它 的点位信 息 。传统测绘 主要是单 点定位 测量 , 提供 可
高精度 的定 位点 , 如全站 仪 , 对 于几 百万 个 能够 完 但 全 表述 目标点特 征及 细节 的属 性点 测量 显得 力不 从
激 光 , 据 激 光 发 射 和 返 回 的 时 间 差 ( me o 根 Ti f