单片机基于80C51单片机的步进电机控制系统
基于51单片机的步进电机控制系统设计
基于51单片机的步进电机控制系统设计中文摘要步进电机是一种受脉冲信号控制,并且能将脉冲信号转化为相应的角位移或者线位移的数字电动机。
由于步进电机具有步距误差不积累、运行可靠、结构简单、惯性小、成本低等优点,因此,被广泛使用于计算机外围电路、自动化控制装置以及其他的数字控制装置中,如打印机、钟表、数模转换设备等装置中。
随着科学技术的快速发展,相应的控制系统也产生了很多种类,步进电机的身影在众多领域中可以看到。
其中采用单片机作为控制核心的控制系统,由于其电路简单、成本低、可靠性强等优点,满足众多领域的需求,得到了大量的运用。
因此,研究基于单片机的步进电机控制系统,具有重要的现实意义。
本设计研究的是基于51单片机对步进电机的控制系统。
通过单片机的I/O端口输出时序方波作为控制信号,信号经过芯片ULN2003驱动芯片驱动步进电机进行不同的指令进行工作。
根据不同的需要,通过按键电路来控制步进电机的启停、正反转和加减速等功能,并在数码管上实时显示步进电机的工作状态。
本文给出了电路各个模块的电路图,并用Proteus的ISIS软件对控制系统的各个功能进行了仿真,并给出了相应的仿真结果图像。
关键词:单片机;步进电机;电机驱动;控制系统AbstractStepper motor controlled by a pulse signal, and a pulse signal can be converted to the corresponding angular displacement or linear displacement of the digital motor. As the stepper motor has a step error does not accumulate, reliable, simple structure, small inertia, low cost, and therefore, are widely used in computer peripheral circuits, automatic control devices and other digital control devices, such as printers, watches and clocks , digital to analog conversion equipment, and other devices. With the rapid development of science and technology, the corresponding control system also produced many types of stepper motor figure can be seen in many areas. Which uses microcontroller as the control of the control system, because of its simple circuit, low cost, high reliability, etc., to meet the needs of many fields, we get a lot of use. Therefore, based on single-chip stepper motor control system has important practical design study is 51 single-chip stepper motor control system. As a control signal, the signal through the chip ULN2003 stepper motor drive to work through the microcontroller I / O port output timing square wave. Depending on the need, through the key circuit to control the start and stop, reversing and ramp functions such as stepper motors, stepper motors in real-time display and digital working condition. In this paper, the circuit diagram of each module, and with the ISIS Proteus software for each function control system simulation, and the simulation results are given corresponding image.Key words: microcontroller; stepper motor; motor drive; control system目录中文摘要 (I)Abstract (II)1 绪论 (1)步进电机及其发展过程 (1)步进电机在我国的应用及前景 (2)本设计的研究内容 (2)步进电机的性能指标及工作原理 (3)步进电机的特点 (3)步进电机的种类 (4)步进电机的主要性能指标 (4)步进电机的工作原理 (6)步进电机控制系统的原理 (7)2 总体方案设计 (9)设计思路的选择 (9)单片机芯片的选择 (11)驱动电机芯片的选择 (12)显示电路的选择 (12)步进电机的选择 (13)3 控制系统的硬件电路设计 (14)键盘控制电路 (14)单片机最小系统电路 (15)数码管显示电路 (16)步进电机的驱动电路 (17)步进电机的其他电路 (18)4 控制系统的软件设计 (19)主程序流程图 (19)读按键子程序流程图 (20)按键处理子程序流程图 (21)电机控制中断程序流程图 (22)5 仿真与测试 (24)仿真软件介绍 (24)仿真的操作步骤 (24)电路板的焊接 (25)电路板的测试 (25)6 结论与展望 (27)致谢 (29)参考文献 (30)附录:系统总体电路图 (31)系统仿真原理图 (31)PCB打印图 (32)原件清单 (32)程序 (33)1 绪论步进电机及其发展过程步进电机是一种受脉冲信号控制,并且能将脉冲信号转化为相应的角位移或者线位移的数字电动机。
基于51单片机实现的步进机控制系统
基于51单片机实现的步进机控制系统摘要步进电机是一种进行精确步进运动的机电执行元件,它广泛地用于工业机械的数字控制。
为使系统的可靠性,通用性,可维护性以及性价比最优,根据控制系统功能要求及步进电动机应用环境,确定了设计系统硬件和软件的功能划分,从而实现了基于8051单片机的四相步进电动机的开环控制系统。
控制系统通过单片机存储器、I/O口、中断、键盘、LED显示器的扩展,步进电动机的环形分配器、驱动及保护电路、人机接口电路、中断系统及复位电路、单电压驱动电路等的设计。
实现了四相步进电动机的正反转、急停等功能。
为实现单片机控制步进电动机系统在数控机床上的特殊应用,系统设计了两个外部中断,以实现步进电动机在某段时间内的反复正反转功能,也即数控机床的刀架自动进给运动。
关键词:8051单片机;四相步进电动机;控制Realizes based on single chip microcomputer 51the stepping motorthe control systemABSTRACTThe stepping motor is a precision electromechanical incremental actuator.It widely uses the digital approach for control of industrial machines.For dependable,in general use that make system,can support sex an sex price ratio superior,divide the line according to control system funcion request and a function for entering electric motor applying environment,making sure designing system hardware with softwares, from but realizes to base on single chip microcomputer 8051 of four mutually the step enters the dynamoelectric opening the wreath the control the system.The control system passes the single saving maching,I/O in a machine, break off,the keyboard, the display of LED expands, a wreah for entering elecreic motor form assigns the machine,drive and the design of its protection electric circuit, man-machine connection electric circuit,interrupt system and reset circuit, single-voltage driver circuit and so on,realizes four mutually the step enters the electric motor positive and negative to turn, nasty stop to wait the function.For realizing single chip microcomputer control a special application for entering electric motor system in severalth contorling machine bed, the system designed two exteriors breaks off,toing realize a the step enters electric motor is in a certain time of again and again positive and negative turn the function, also count namely the knife that control the machine bed is automatic to enter to the sport.KEYWORD:single chip microcomputer 8051;four-phase stepper motor ;control目录1 绪论 (1)2 步进电动机原理及其控制技术 (3)2.1 步进电动机的原理 (3)2.2 步进电动机的特性 (4)2.2.1 步进电动机的静态指标及术语 (4)2.2.2 步进电机动态指标及术语 (5)2.2.3 步进电动机的振荡、失步及解决方法 (6)2.3 步进电动机的脉冲分配 (7)2.4 步进电动机的速度及其加减速控制 (7)2.4.1 步进电动机的速度控制 (7)2.4.2 步进电动机的加、减速控制 (8)2.5 步进电动机的驱动系统 (10)3 系统总体设计简介 (11)3.1 系统功能 (11)3.2 系统组成及其器件选择 (11)3.2.1 系统组成 (11)3.2.2 器件选择 (12)3.3 系统的可靠性/抗干扰设计 (12)3.3.1 软件的可靠性设计 (13)3.3.2 硬件抗干扰措施 (13)3.3.3 软件抗干扰措施 (13)4 硬件设计 (14)4.1 单片机控制步进机系统原理图及说明 (14)4.1.1 系统模块之一—四相混合式步进电动机环形分配器 (14)4.1.2 系统模块之二—四相步进电动机驱动及保护电路 (15)4.1.3 系统模块之三—人机接口电路 (17)4.1.4 系统模块之四—中断系统及复位电路 (17)4.1.5 系统模块之五—各档直流电源 (18)4.2 单片机原理 (18)4.2.1 MCS—51单片机 (18)4.2.2 MCS—51单片机的内部结构 (19)4.2.3 MCS—51单片机引脚功能 (20)4.2.4 MCS—51单片机的存储器结构 (22)4.2.5 时钟电路与时序 (26)4.2.6 并行输入/输出端口结构 (27)4.3 单片机的片外总线结构及其存储器扩展 (29)4.3.1 单片机的片外总线结构 (29)4.3.2 外部程序存储器扩展 (31)4.3.3 外部数据存储器扩展 (32)4.3.4 译码法 (33)4.4 I/O接口原理及其扩展 (33)4.5 系统外设接口 (37)4.5.1 键盘接口原理 (37)4.5.2 键盘的控制要求 (38)4.5.3 LED显示器接口原理 (39)4.6.1 3—8译码器:74LS138 (40)4.6.2 地址锁存器:74LS373 (41)5 软件设计 (42)5.1 软件设计流程图 (42)5.2 设计相关程序 (44)结论 (52)致谢............................................ 错误!未定义书签。
单片机步进电动机控制系统设计
前言单片机是一个单芯片形态、面向控制对象的嵌入式应用计算机系统。
它的出现及发展使计算机技术从通用型数值计算领域进入到智能化的控制领域。
从此,计算机技术在两个重要领域-—通用计算机领域和嵌入式计算机领域都得到了极其重要的发展,并正在深深地改变着我们的社会。
采用8031单片机控制步进电机,可实现步进电动机正反转控制和步进电动机的无级调速。
分析了步进电机的工作原理,讨论了系统硬件和软件的设计方法,并给出了步进电机的四相八拍单片机控制的具体实现方法。
该系统操作简单,降低了成本,提高了系统的可靠性。
步进电机具有控制方便和体积小等特点,因此在智能仪表和位置控制中得到了广泛的应用。
近年来大规模集成电路的发展以及各种单片机的迅速发展和普及,为设计功能强、价格低的步进电机控制驱动器提供了先进的技术和充足的资源.步进电动机是一种将电脉冲信号转换成相应角位移或线位移的电动机,它的运行需要专门的驱动电源,驱动电源的输出受外部的脉冲信号控制。
每一个脉冲信号可使步进电机旋转一个固定的角度,这个角度称为步距角。
脉冲的数量决定了旋转的总角度,脉冲的频率决定了电动机旋转的速度,改变绕组的通电顺序可以改变电机旋转的方向。
在数字控制系统中,它既可以用作驱动电动机,也可以用作伺服电动机.它在工业过程控制中得到广泛的应用,尤其在智能仪表和需要精确定位的场合应用更为广泛。
1 单片机的基本知识1。
1 概述单片微型计算机简称单片机,由于它的结构及功能均是按工业控制要求设计的,所以其确切的名称应是单片微控制器(Single Chip Microcontroller).它是把微型机算计的各个功能部件:中央处理器CPU、随机存储器RAM、只读存储器ROM、并行I/O接口、定时器/计数器及串行通信接口等集成在一块芯片上,构成一个完整的微型计算机系统,故又把它称为单片微型计算机系统(Single Chip Microcomputer).由于单片机面对的是测控对象,突出的是控制功能,所以它从功能和形态上来说都是应控制领域应用的要求而诞生的.随着单片机技术的发展,它在芯片内集成了许多面对测控对象的接口电路,如ADC、DAC、高速I/O口、PWM、WDT等。
单片机控制步进电机
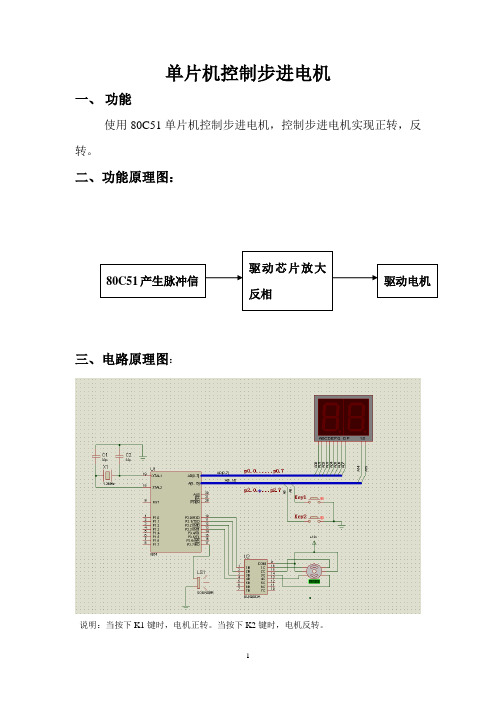
单片机控制步进电机一、功能使用80C51单片机控制步进电机,控制步进电机实现正转,反转。
二、功能原理图:三、电路原理图:说明:当按下K1键时,电机正转。
当按下K2键时,电机反转。
四、实验说明:实验中用P0口和P2.6和P2.7接LED数码管,P2.0和P2.1接按钮开关。
P3.0~P3.3接驱动芯片。
UL2003A的输出端分别接电机的A、B、C、D相。
当电机正转是时显示CC,当电机反转是显示AA。
1.步进电机工作原理步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
实验中使用的是一个四相步进电机。
四相步进电机实物图四相步进电机截面图实验中步进电机运用了双四拍运行方式,当电机绕组通电时序为AD-BC-CD-DA时为正转。
当电机绕组通点时序为DA-CD-BC-AB时为反转。
2.驱动芯片UL2003A实验中步进电机的驱动芯片为UL2003A,它是集电极开路输出的功率反相器。
它的功能是放大和倒相80C51输出的脉冲信号,再将放大和倒相和的信号送给步进电机。
五、程序流程图六、实现程序K1 EQU P2.0K2 EQU P2.1ORG 0000HAJMP MAINORG 0030HMAIN: MOV A,#33HSETB P2.6SETB P2.7KEY1: SETB K1 ;JB K1, KEY2 ;判断K1是否按下KEY11: ACALL DELAY_A ;延时,去抖动SETB K1JB K1, KEY11 ;确认键按下ACALL CLOCKWISEKEY2: SETB K2JB K2, KEY1 ;判断K2是否按下KEY21: ACALL DELAY_A ;延时,去抖动SETB K2JB K2, KEY21 ;确认键按下ACALL ANTI_CLOCKWISEAJMP KEY1CLOCKWISE: RL AMOV P3,A ;驱动电机正转MOV P0,#0C6H ;显示CCACALL DELAYRETANTI_CLOCKWISE:RR AMOV P3 , A ;驱动电机反转MOV P0,#88H ;显示AAACALL DELAYRETDELAY: MOV R6 , #20HDELAY22: MOV R7 , #80HDELAY11: DJNZ R7 , DELAY11DJNZ R6 , DELAY22RETDELAY_A: MOV R7,#88HDELAY1: DJNZ R7,DELAY1RETend七、实验思考单片机不仅可以控制步进电机的转向,还可以控制步进电机的速度。
基于51单片机的步进电机控制系统设计

基于51单片机的步进电机控制系统设计步进电机是一种特殊的直流电动机,具有定角度、定位置、高精度等特点,在许多领域得到广泛应用,如机械装置、仪器设备、医疗设备等。
本文将基于51单片机设计一个步进电机控制系统,主要包括硬件设计和软件设计两部分。
一、硬件设计步进电机控制系统的硬件设计主要包括51单片机、外部电源、步进电机驱动模块、以及其他辅助电路。
1.51单片机选择由于步进电机控制需要执行复杂的算法和时序控制,所以需要一个性能较高的单片机。
本设计选择51单片机作为主控芯片,因为51单片机具有丰富的外设接口、强大的计算能力和丰富的资源。
2.外部电源步进电机需要较高的电流供给,因此外部电源选择稳定的直流电源,能够提供足够的电流供电。
电源电压和电流的大小需要根据具体的步进电机来确定。
3.步进电机驱动模块步进电机驱动模块是连接步进电机和51单片机的关键部分,它负责将51单片机输出的脉冲信号转化为对步进电机的驱动信号,控制步进电机准确转动。
常用的步进电机驱动芯片有L297、ULN2003等。
4.其他辅助电路为了保证步进电机控制系统的稳定运行,还需要一些辅助电路,如限流电路、电源滤波电路、保护电路等。
这些电路的设计需要根据具体的应用来确定。
二、软件设计1.系统初始化系统初始化主要包括对51单片机进行外部中断、定时器、串口和IO 口等初始化设置。
根据实际需求还可以进行其他模块的初始化设置。
2.步进电机驱动程序步进电机的驱动程序主要通过脉冲信号来控制电机的转动。
脉冲信号的频率和脉冲宽度决定了电机的转速和运行方向。
脉冲信号可以通过定时器产生,也可以通过外部中断产生。
3.运动控制算法步进电机的运动控制可以采用开环控制或闭环控制。
开环控制简单,但无法保证运动的准确性和稳定性;闭环控制通过对电机转动的反馈信号进行处理来调整脉冲信号的生成,从而实现精确的运动控制。
4.其他功能设计根据具体的应用需求,可以加入其他功能设计,如速度控制、位置控制、加速度控制等。
基于51单片机的步进电机控制系统设计与实现

步进电机工作原理
步进电机是一种基于磁场的控制系统,工作原理是当电流通过定子绕组时,会 产生一个磁场,该磁场会吸引转子铁芯到相应的位置,从而产生一定的角位移。 步进电机的角位移量与输入的脉冲数量成正比,因此,通过控制输入的脉冲数 量和频率,可以实现精确的角位移和速度控制。同时,步进电机具有较高的分 辨率和灵敏度,可以满足各种高精度应用场景的需求。
二、系统设计
1、硬件设计
本系统主要包括51单片机、步进电机、驱动器、按键和LED显示等部分。其中, 51单片机负责接收按键输入并控制步进电机的运动;步进电机用于驱动负载运 动;驱动器负责将51单片机的输出信号放大,以驱动步进电机。LED显示用于 显示当前步进电机的状态。
2、软件设计
软件部分主要包括按键处理、步进电机控制和LED显示等模块。按键处理模块 负责接收用户输入,并根据输入控制步进电机的运动;步进电机控制模块根据 按键输入和当前步进电机的状态,计算出步进电机下一步的运动状态;LED显 示模块则负责实时更新LED显示。
三、系统实现
1、按键输入的实现
为了实现按键输入,我们需要在主程序中定义按键处理函数。当按键被按下时, 函数将读取按键的值,并将其存储在全局变量中。这样,主程序可以根据按键 的值来控制步进电机的转动。
2、显示输出的实现
为了实现显示输出,我们需要使用单片机的输出口来控制显示模块的输入。在 中断服务程序中,我们根据设定的值来更新显示模块的输出,以反映步进电机 的实时转动状态。
基于单片机的步进电机控制系统需要硬件部分主要包括单片机、步进电机、驱 动器、按键和显示模块等。其中,单片机作为系统的核心,负责处理按键输入、 控制步进电机转动以及显示输出等功能。步进电机选用四相八拍步进电机,驱 动器选择适合该电机的驱动器,按键用于输入设定值,显示模块用于显示当前 步进电机的转动状态。
51单片机步进电机控制系统设计
步进电机控制系统设计引言随着人民生活水平的提高,产品质量、性能、自动化程度等已经是人们选择产品的主要因素。
其中,步进电机正反转自动控制在生活中起了很大的作用,比如洗衣机的工作、遥控汽车的操作、DVD的应用等等,它在实际生活中给人们需求上提供了很大的方便与乐趣。
不只是生活,它还在工业、农业、交通运输等各方面得到了广泛的应用,实现电动机正反转的控制是很多产品设计的核心问题。
步进电机显示出交流电动机不能比拟的良好启动性能和调速性能,比较广泛应用于速度调节要求过高,正反转频繁或多元同步协调运转的机械生产。
因此,学会电动机正反转控制的原理是极其重要的。
然而,在本步进电机正反转仿真设计中,要借助Proteus软件、Keil软件和C语言的辅助进行仿真设计,通过仿真设计,让我们更清楚了解步进电机正反转的原理和电路图,增强对步进电机的认知。
在Proteus绘制好原理图后,调入已编译好的目标代码文件:*.HEX,可以在Proteus的原理图中看到模拟的实物运行状态和过程,Proteus还提供了一个图形显示功能,可以将线路上变化的信号,以图形的方式实时地显示出来,其作用与示波器相似,但功能更多。
这些虚拟仪器仪表具有理想的参数指标,例如极高的输入阻抗、极低的输出阻抗。
这些都尽可能减少了仪器对测量结果的影响。
在本设计中,Proteus软件采用了电容、电阻、晶振、电动机、LED、开关、电动机等多种元件进行绘图,并基于80C51和ULN2003A进行电路图设计,充分展示Proteus软件元件库量大,掌握它的基本绘图操作。
而对于Keil软件,采取创建工程,创建执行文件,利用C语言编写程序,生成hex文件,为Proteus 仿真提供驱动控制,实现步进电机正反转的设计。
在本论文设计中,主要介绍步进电机正反转原理,Proteus软件功能绘图、仿真调试,以及Keil软件功能、程序编写和仿真程序文件生成。
让大家更清楚了解Proteus软件、Keil软件、C语言在步进电机正反转仿真设计的应用。
基于单片机80c51+proteus的步进电机控制的设计研究
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中国地质大学长城学院
本科课程设计题目:基于80C51单片机的步进电机控制系统
系别信息工程系
学生姓名
专业电气工程及其自动化
学号
指导教师
职称讲师
2014 年6 月11 日
摘要
本文研究基于51系列单片机的步进电机控制系统设计,该系统包括以下几个部分:数据采集、数据处理、终端接收,该系统以汇编语言为单片机的驱动程序语言,单片机控制步进电机,主要任务是把二进制数变成脉冲序列,按相序输入脉冲以实现电机转动方向控制,利用单片机实现对步进电机的远距离实时监控,从而达到高效、节能的控制步进电机工作的目的,该系统具有成本低、控制方便的特点。
使用单片机驱动四相步进电机,控制步进电机以四相八拍的方式运行,来实现步进电机正向/反向旋转,P1.0~P1.3分别控制步进电机;P1.5~P1.7分别控制步进电机的停止、正转、反转。
关键词:51单片机;步进电机;数据采集;汇编语言;
目录
摘要 0
1 设计目的 (1)
2设计内容与要求 (1)
3 总体设计方案 (1)
3.1整体方案 (1)
3.2具体方案实现 (1)
4系统硬件设计 (2)
4.1复位电路 (2)
4.2晶振电路 (2)
4.3按键电路 (3)
4.4指示灯电路 (3)
4.5驱动电路 (4)
4.6步进电机 (4)
5程序软件设计 (5)
5.1程序流程图 (5)
5.2源程序 (6)
6系统调试与仿真 (7)
7总结 (8)
1设计目的
1.掌握单片机控制步进电机的硬件接口电路。
2.掌握步进电机驱动程序的设计和调试方法。
3.熟悉步进电动机的工作特性。
2设计内容与要求
1.查阅资料,了解步进电机的工作原理。
2.通过单片机给定参数控制电机转动。
3.通过按钮控制正转、反转和停止。
3总体设计方案
3.1整体方案
本系统主要是由AT89C51,步进电机控制器ULN2004,步进电机,通过单片机编程,实现步进电机控制的脉冲分配,使电机实现正转,反转以及停止等功能
3.2具体实现方案
根据系统要求画出单片机控制步进电机的控制框图,见下图。
系统包括单片机、按键、驱动电路和步进电机。
键盘80c51单片机
步进电机
驱动电路
开始通电后,步进电机停止转动,单片机分别接有按钮开关正,反,停用来控制步进电机的正转、反转和停止。
当按下正后,电机正转;当按下反后,电机反转,当按下停,电机停转。
4 系统硬件设计
本系统主要由单片机主控模块、复位电路模块、晶振电路模块、独立键盘电路模块、指示灯电路模块、驱动电路模块、步进电机模块等组成,下面将对各模块作简要介绍。
4.1复位电路
为确保微机系统中电路稳定可靠工作,复位电路是必不可少的一部分,复位电路的第一功能是上电复位。
AT89C52 的复位端是一个施密特触发输入,高电平有效[3]。
RST端如果由低电平上升到高电平并持续2个机器周期,系统将实现一次复位操作。
此复位电路中,上电或按一下复位开关都能在RST 端出现一段时间的高电平,使系统复位。
如图1示。
图表1
4.2晶振电路
每个单片机系统里都有晶振,全称是叫晶体振荡器,在单片机系统里晶振的作用非常大,他结合单片机内部的电路,产生单片机所必须的时钟频率,单片机的一切指令的执行都是建立在这个基础上的,晶振的提供的时钟频率越高,那单片机的运行速度也就越快。
晶振的作用是为系统提供基本的时钟信号。
通常一个系统共用一个晶振,便于各部分保持同步[6]。
有些通讯系统的基频和射频使用不同的晶振,而通过电子调整频率的方法保持同步。
本次设计的晶振其输入端为芯片引脚XTAL1,其输出端为芯片引脚XTAL2。
通过这两个引脚在芯片外并接12MHz晶振和两只30F的电容,这样就构成一个稳定的自激振荡器。
如图2示。
图表2
4.3按键电路
本设计的键盘电路由3独立按键组成,如图3示。
图表3
功能如下:
正:正转键。
按下时步进电机正转。
反:反转键。
按下时步进电机反转。
停:停止键。
运行状态按下此键即停止运转。
4.4指示灯电路
指示灯电路包括D1、D2、D3、D4四个LED灯组成,分别串联一个分别串联一个电阻,提供稳定的电压与电流。
图表4
4.5驱动电路模块
驱动电路模块包括四个非门和unl2003,通过脉冲让步进电机转动。
图表5
4.6步进电机
有三线式、五线式、六线式三种,但其控制方式均相同,必须以脉冲电流来驱动。
若每旋转一圈以20 个励磁信号来计算,则每个励磁信号前进18 度,其旋转角度与脉冲数成正比,正、反转可由脉冲顺序来控制。
励磁方式可分为全部励磁及半步励磁,其中全步励磁又有1 相励磁及2相励磁之分,而半步励磁又称1-2 相励磁。
图为步进电动机的控制等效电路,适应控制A、B、/A、/B 的励磁信号,即可控制步进电动机的转动。
每输出一个脉冲信号,步进电动机只走一步。
因此,依序不断送出脉冲信号,即可步进电动机连续转动。
励磁顺序: A→AB→B→BC→C→CD→D→DA→A。
图表6
5 程序软件设计
5.1程序流程图
本设计中采用了主程序调用各个子程序的方法。
包括对系统初始化和对硬件设备进行初始化,并使硬件处于准备开始的状态。
扫描是否有按键按下,有则跳转到相应的子程序执行,没有则循环等待。
子程序采用查表法获取数值,使得单片机发出相应的脉冲驱动步进电机转动。
具体程序流程图如下。
开始
步进电机停止
扫描是否按键
按下正转了吗?
按下反转了吗?
按下停止了吗?
N
N
反转模块
步进电机停止
正转模块
Y
Y
Y
读取表格
输出
结束
5.2源程序
ORG 0000
LJMP START
ORG 0100H
START:
LOOP: MOV P1,#00H ; 步进电机停止
ORL P1,#0E0H
MOV A,P1
JB ACC.5,STOP ; 停止
JB ACC.6,FOR ; 正转
JB ACC.7,rev ; 反转
JMP LOOP ;
FOR: MOV R0, #00H ; 正转到tab取码指针初值for1: MOV A,R0 ; 取码
MOV DPTR,#TABLE ;
MOVC A,@A+DPTR
JZ LOOP ; 是否到了结束码00h
CPL A ;把acc反向
MOV P1,A ;输出到p1开始正转
ACALL DELAY ;转动的速度
INC R0 ;取下一个码
JMP FOR1 ;继续正转
rev: MOV R0,#09H ;反转到tab取码指针初值rev1: MOV A,R0
MOV DPTR,#TABLE ;取码
MOVC A,@A+DPTR
JZ LOOP ;是否到了结束码00h
CPL A ;把acc反向
MOV P1,A ;输出到p1开始反转
ACALL DELAY ;转动的速度
INC R0 ;取下一个码
JMP REV1 ;继续反转
stop:
MOV P1, #00H
JMP LOOP
DELAY: MOV R1,#150 ;步进电机的转速20ms
D1: MOV R2,#248
DJNZ R2,$
DJNZ R1,D1
RET
TABLE:
db 01h,03h,04h,06h,04h,12h,08h,09h ;正转表
db 00 ;正转结束
db 01h,09h,08h,12h,04h,06h,04h,03h ;反转
db 00 ;反转结束
END
6 系统调试与仿真
中国地质大学长城学院2014课程设计
7 总结
主要以单片机为基础,用单片机来控制电机的转动,熟悉单片机的一般搭建电路,了解一般电子电路与单片机构成简单系统及简单编程的方法。
进一步加深对单片机常用指令的理解与运用。
能够较熟练的运用protues绘制电路原理图以及进行仿真。
在课设过程中,使我得到了一次用专业知识、专业技能分析和解决问题、全面系统的锻炼。
使我在单片机的基本原理、单片机应用系统开发过程,以及常用编程设计思路技巧的掌握方面有了很大的提高。
同时在老师的悉心指导和严格要求下,获得了丰富的理论知识,极大地提高了实践能力,单片机领域对我今后进一步学习计算机方面的知识有极大的帮助,使我们积累实际电子制作经验,达到学以致用的目的,真正的吧理论和实践结合起来,让我们进一步体验到实践的重要性。
对我们以后的工作有很大的帮,同时锻炼了我们团队合做精。
同时非常感谢老师的细心指导,当我们遇到困难时,能及时给予我们帮助。
参考文献:
[1]潘晓宁,朱耀东。
单片机程序设计实践教程
[2]刘海宽,包建华。
单片机实验与实训教程
[3]杨居义,马宁。
单片机原理与工程应用
[4]胡健,刘玉宾。
单片机原理及接口技术实践教程
[5]韩志军,刘新民。
单片机系统设计与应用实例
[6]朱博,马鸣鹤。
单片机应用技术教程
第8 页共8 页。