第4章 4.1.2.
第4章 安全评价方法-1-1
4.1.2 安全评价方法的选择 4.1.2.1 安全评价方法的选择原则 ①充分性原则:准备好充分的被评价系统的 资料,供选择评价方法时参考。 ②适应性原则:根据系统和子系统、工艺的 性质和状态,选择合适的评价方法。 ③系统性原则:被评价系统能够提供所需的 系统化数据和资料。
④针对性原则:选择的方法应能提供与评价 目的相应的结果。 ⑤合理性原则:选择计算过程简单、所需基 础数据最少、方法最容易获取、评价工作量合理 且评价结果可信。
概率风险评价法: 优点:能够直接给出系统的事故发生概率, 不仅评价结果的可信程度较高,而且便于各系统 事故可能性大小的比较。 对于同一个系统,便于不同事故可能性和不 同致因因素重要性的比较。 缺点:该类评价方法不适用于基本致因因素 不确定或基本致因因素事故概率不能给出的系统。
b.伤害(或破坏)范围评价法 伤害(或破坏)范围评价法是根据事故的数学 模型,应用计算数学方法,求取事故对人员的伤 害范围或对物体的破坏范围的安全评价方法。 液体泄漏模型、气体泄漏模型、气体绝热扩 散模型、池火火焰与辐射强度评价模型等都属于 伤害(或破坏)范围评价法。
第四章
安全评价方法
4.1绪论 安全评价方法是对生产系统的危险、有害因 素及其危险、危害程度进行分析、评价的方法, 是进行定性、定量安全评价的工具。 每种评价方法都有其适用范围和应用条件, 在进行安全评价时,应根据安全评价对象和要实 现的安全评价目标,选择适用的安全评价方法。
4.1.1 安全评价方法的分类
4.3.2
专家评议法步骤 预测专家 专业领域的专家 演绎专家
明确分析评价、预测的具体问题 组成专家评议分析、预测小组
举行专家会议,对问题进行分析、预测 分析、归纳出专家会议的结果
分析专家
第4章课后习题及答案
返 回
第 4 章 供 电 与 用 电
练习题解答
4.1.1 某三相同步发电机,三相绕组联结成星形时的线电压为 10.5kV,若将它联结成三角形,则线电压是多少?若联结成星形 时,L2相绕组的首末端接反了,则三个线电压的有效值U12 , U23 和U31各是多少? · · · · U31= U3 -U1 · -U2 解: 星形联结时UlY = 10.5kV U3 · U 3 UlY 10.5 = kV = 6.06kV ∴UpY = · · U 1=U23 √ 3 √3 · ·-U =U 三角形联结时相电压不变, 2 3 · UlY = UpY =6.06kV L2首末端接反的相量图如图所示:
· · · 0 0 0 IL2 = I2 - I1 ( 8 . 8 30 8 . 8 0 ) A 4 . 56 105 A · · · 0 0 0 IL3 = I3 - I2 ( 8 . 8 30 8 . 8 30 ) A 8 . 8 90 A
XL= Z sin = 77.1×0.6 Ω = 46.3 Ω
返 回 上一题 下一题
第 4 章 供 电 与 用 电
4.3.2 某三相负载,额定相电压为220V,每相负载的电阻为4Ω,感 抗为3Ω,接于线电压为380V的对称三相电源上,试问该负载应
采用什么联结方式?负载的有功功率、无功功率和视在功率?
· I
l2
· I
l3
· I
2
· I
3
-jXC
解: 负载为不对称三相负载
· · 0 U U 220 120 2 23 · 0 I2 = Z = -jX = 8 . 8 30 A -j25 2 C
返 回 上一题 下一题
燃烧理论第4章

第4章着火(自燃与引燃)本章内容:着火的概念谢苗诺夫的热着火理论(热)自燃的着火延迟链着火理论强制着火着火范围4.1 着火的概念燃烧过程一般可分为两个阶段,第一阶段为着火阶段,第二阶段为着火后的燃烧阶段。
在第一阶段中,燃料和氧化剂进行缓慢的氧化作用,氧化反应所释放的热量只是提高可燃混合物的温度和累积活化分子,并没有形成火焰。
在第二阶段中,反应进行得很快,并发出强烈的光和热,形成火焰。
与连续、稳定的燃烧阶段不同,着火是一个从不燃烧到燃烧的自身演变或外界引发的过渡过程,是可燃混合物的氧化反应逐渐加速、形成火焰或爆炸的过程。
在这个过渡过程中,反应物的消耗及产物的生成尚不明显,它们之间的相互扩散的量级不大,扩散速度对此过渡过程的化学反应影响极微。
因此,着火是一个化学动力学控制的过程。
火焰的熄火过程也是一个化学反应速度控制的过程。
但与着火过程相反,它是一个从极快的燃烧化学反应到反应速度极慢,以至不能维持火焰或几乎停止化学反应的过程。
4.1.1 两种着火类型有两种使可燃混合物着火的方式:自发着火及强制着火。
自发着火有时又叫自动着火或自燃(以后统称为自燃)。
它是依靠可燃混合物自身的缓慢氧化反应逐渐累积热量和活化分子,从而自行加速反应,最后导致燃烧。
自燃有两个条件:1)可燃混合物应有一定的能量储蓄过程。
2)在可燃混合物的温度不断升高,以及活化分子的数量不断积累后,从不显著的反应自动转变到剧烈的反应。
有许多燃料与氧化剂在高温下迅速混合并导致自燃的例子。
例如,柴油喷到高温的压缩空气中在极短的时间内,部分地蒸发并与空气混合,在经历一定的延迟后反应便进行得非常快而着火燃烧;在冲压式喷气发动机及涡轮喷气发动机中燃料喷雾在加力燃烧器中的着火;汽油机中的爆震等。
强制着火是靠外加的热源(外部点火源)向混合物中的局部地方加入能量,使之提高温度和增加活化分子的数量,迫使局部地方的可燃混合物完成着火过程而达到燃烧阶段,然后火焰向可燃混合物的其他部分传播,导致全部可燃混合物燃烧。
工程力学第4章

(4) 结果分析或校核。
第4章 平面任意力系
例4-2 摇臂吊车如图4-9(a)所示。横梁AB的A端为固定 铰链支座,B端用拉杆BC与立柱相连。已知梁的重力G1=4kN, 载荷G2=12 kN,横梁长l=6m,α=30°,求当载荷距A端距 离x=4 m时, 拉杆BC的受力和铰支座A的约束反力。
第4章 平面任意力系
3. 平面力偶系是特殊的力系,根据力偶的性质,在基本方程 中的投影方程自然满足,所以只有一个方程,
MO (F) 0
第4章 平面任意力系
4.2.3
(1) 根据题意,选取适当的研究对象;对所选研究对 象进行受力分析并画受力图。
(2) 选取适当的直角坐标系。坐标轴应与较多的未知 反力平行或垂直。一般情况下,水平和垂直的坐标轴可以不画, 但其它特殊方向的坐标轴必须画出。
第4章 平面任意力系
(3) 该力系上述的三种简化结果,从形式上是不同的, 但都与原力系等效。所以,三种情况的简化结果是等效的。
第4章 平面任意力系
4.1.3 固定端约束
固定端约束是工程中一种常见的约束。如图4-6所示,夹紧 在卡盘上的工件(图(a)),固定在刀架上的车刀(图(b)), 嵌入墙中的雨罩(图(c))等都属于固定端约束。由约束的性质 可知, 固定端约束能限制物体沿任何方向的移动,也能限制物 体在约束处的转动。所以,固定端A处的约束反力可用两个正
主矢FR′的大小和方向分别为:
FR' (FRx )2 (FRy )2 2002 1502 250N
tan FRy 150 0.75
FRx 200
第4章 平面任意力系
电路原理 第4章 常用的电路定理

U ad ' U s = I5' I5
Us 6 因此 I 5 = I5 '= × 1 = 0.05 A U ad ' 120
需要注意 注意的是,应用叠加 叠加定理和齐次 齐次定 注意 叠加 齐次 理时,当激励的参考方向反向 反向时,相当于激 反向 励变为原来的-1倍。 - 倍 4.2 替代定理 已知电路中第k条支路的电压uk和电流ik, 那么无论该条支路是由何种元件构成的,它 都可以用电压等于uk的理想电压源或电流等 于ik的理想电流源去替代,替代之后,电路 中其他支路的电压和电流均不变。
得原电路的戴维南等效电路 得原电路的戴维南等效电路 由全电路欧姆定律可得: 由全电路欧姆定律可得:
24Ω
A
I5 16Ω
+ _ 2V
B
电路如图示, 例题 电路如图示,求UR 。 将待求支路断开
(1) 求开路电压 OC 求开路电压U UOC=6I1+3I1 I1=9÷ (6+3)=1A UOC=9V +
解:这个电路是由电阻的串、并联组成,可 以用等效电路的分析方法进行计算,但是 用齐次定理计算会更方便。 先设I5支路电流为I5’=1A, 则:
U cd ' = (15 + 15) I 5' = 30V
4
所以, I
U cd ' 30 '= = = 1A 30 30
I3 ' = I 4 '+I5 ' = 1+1 = 2A
例4.1-1 图4.1-2(a)所示电路,试用叠加 定理求3Ω电阻上的电压U及功率。
8Ω 2Ω (a) 8Ω 2Ω (c) 图4.1-2 例4.1-1图 3A 6Ω + 3Ω U’’ - 3A 6Ω (d) 3A 6Ω + 3Ω U - 8Ω 2Ω (b) 8Ω 2Ω - 3Ω U’’ + 6Ω + 3Ω U’ -
九年级上科学知识点总结(第4章)
九年级上科学知识点总结
第4章
4.1 食物与摄食
4.1.1 脂肪,蛋白质,糖,维生素
4.1.2 了解牙的结构
4.2 食物的消化与吸收
4.2.1 清楚人体消化吸收食物的过程(重,难点)
4.2.2 各种酶的作用,及酶的专一性,影响酶催化作用的因素
4.3 体内物质的运输
4.3.1 了解血液中三种血细胞的作用及特征
4.3.2 心脏结构及心脏内血液的流向(重,难)
4.3.3 人体内血液循环,体循环,肺循环过程(重)
4.4 能量的获得 4.4.1 糖类+氧—— 二氧化碳+水+能量
4.4.2 动物无氧呼吸 葡萄糖——乳酸+能量(少量)
植物无氧呼吸 葡萄糖——酒精+能量(少量)+二氧化碳
4.5 体内物质的动态平衡
4.5.1 糖,脂肪,蛋白质在人体内的转化与储存
4.5.2 泌尿系统的各器官与功能
4.5.3新陈代谢(重)
4.6 代谢的多样性
4.6.1 自养,异养
4.6.2 微生物,腐生生物,寄生生物,发酵
酶 酶
酶。
机械工程控制基础(第4章 系统的频率特性分析)

(4.1.10)
根据频率特性的定义可知,系统的幅频特性和相频特性分别为:
G ( j ) Xi ( ) G ( j ) A ( ) X o ( )
(4.1.11)
故 G ( j ) G ( j ) e
j G ( j )
就是系统的频率特性,它是将 G ( s )
d dt
微分方程
dt
s 传递函数 s
系统
j
频率特性
j
图4.1.2 系统的微分方程、传递 函数和频率特性相互转换关系图
中原工学院
机电学院
4.1.4 频率特性的特点和作用
第1
系统的频率特性就是单位脉冲响应函数的Fourier变换,即频谱。 所以,对频率特性的分析就是对单位脉冲响应函数的频谱分析。
第2
K
所以
A
X o Xi
1 T
2
2
arctan T
或
K 1 T
2 2
e
j arctan T
中原工学院
机电学院
2. 将传递函数中的s换为 j (s=j )来求取
由上可知,系统的频率特性就是其传递函数G(s)中复变量s j 的特殊情况。由此得到一个极为重要的结论与方法,即将系统的传递
G
j 端点的轨迹即为频率特性的极坐标图, 或称为Nyquist 图, 如
中原工学院
机电学院
图4.2.1所示。它不仅表示幅频特性和相频特性, 而且也表示实频特性和
虚频特性。图中的箭头方向为从小到大的方向。
正如4.1节所述, 系统的幅频特性和相频特
性分别为
A ( ) X o ( ) Xi G
第4章飞行器机载设备
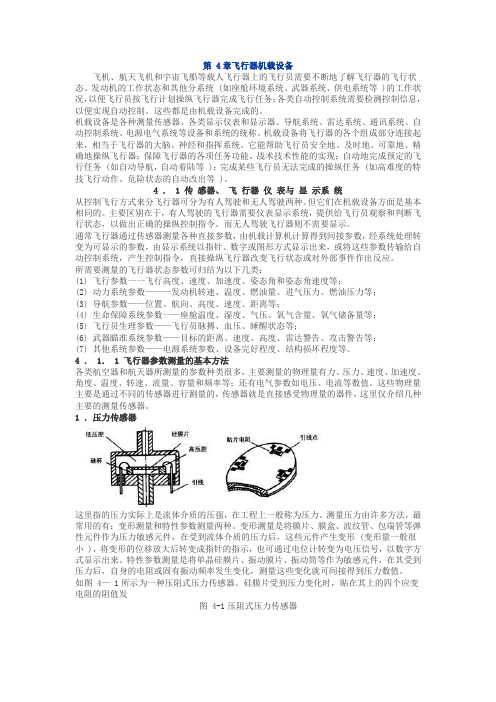
第 4章飞行器机载设备飞机、航天飞机和宇宙飞船等载人飞行器上的飞行员需要不断地了解飞行器的飞行状态、发动机的工作状态和其他分系统 (如座舱环境系统、武器系统、供电系统等 )的工作状况,以便飞行员按飞行计划操纵飞行器完成飞行任务;各类自动控制系统需要检测控制信息,以便实现自动控制。
这些都是由机载设备完成的。
机载设备是各种测量传感器、各类显示仪表和显示器、导航系统、雷达系统、通讯系统、自动控制系统、电源电气系统等设备和系统的统称。
机载设备将飞行器的各个组成部分连接起来,相当于飞行器的大脑、神经和指挥系统。
它能帮助飞行员安全地、及时地、可靠地、精确地操纵飞行器;保障飞行器的各项任务功能、战术技术性能的实现;自动地完成预定的飞行任务 (如自动导航,自动着陆等 );完成某些飞行员无法完成的操纵任务 (如高难度的特技飞行动作、危险状态的自动改出等 )。
4 . 1 传感器、飞行器仪表与显示系统从控制飞行方式来分飞行器可分为有人驾驶和无人驾驶两种。
但它们在机载设备方面是基本相同的。
主要区别在于,有人驾驶的飞行器需要仪表显示系统,提供给飞行员观察和判断飞行状态,以做出正确的操纵控制指令。
而无人驾驶飞行器则不需要显示。
通常飞行器通过传感器测量各种直接参数,由机载计算机计算得到间接参数,经系统处理转变为可显示的参数,由显示系统以指针、数字或图形方式显示出来,或将这些参数传输给自动控制系统,产生控制指令,直接操纵飞行器改变飞行状态或对外部事件作出反应。
所需要测量的飞行器状态参数可归结为以下几类:(1) 飞行参数一一飞行高度、速度、加速度、姿态角和姿态角速度等;(2) 动力系统参数———发动机转速、温度、燃油量、进气压力、燃油压力等;(3) 导航参数——位置、航向、高度、速度、距离等;(4) 生命保障系统参数一—座舱温度、湿度、气压、氧气含量、氧气储备量等;(5) 飞行员生理参数——飞行员脉搏、血压、睡醒状态等;(6) 武器瞄准系统参数——目标的距离、速度、高度、雷达警告、攻击警告等;(7) 其他系统参数——电源系统参数、设备完好程度、结构损坏程度等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4.1.2圆的一般方程
【课时目标】1.正确理解圆的一般方程及其特点.2.会由圆的一般方程求其圆心、半径.3.会依据不同条件利用待定系数法求圆的一般方程,并能简单应用.4.初步掌握点的轨迹方程的求法,并能简单应用.
1.圆的一般方程的定义(1)当________________时,方程x 2+y 2+Dx +Ey +F =0叫做圆的一般方程,其圆心为____________,半径为______________________.(2)当D 2+E 2-4F =0时,方程x 2+y 2+Dx +Ey +F =0表示点________________.
(3)当__________________时,方程x 2+y 2+Dx +Ey +F =0不表示任何图形.
2.由圆的一般方程判断点与圆的位置关系
已知点M (x 0,y 0)和圆的方程x 2+y 2+Dx +Ey +F =0(D 2+E 2-4F >0).,则其位置关系如下表:位置关系代数关系
点M 在圆外x 20+y 20+Dx 0+Ey 0+F ________0
点M 在圆上x 20+y 20+Dx 0+Ey 0+F ________0
点M 在圆内x 20+y 20+Dx 0+Ey 0+F ________0
一、选择题
12x 2+2y 2+6x -4y -3=0的圆心坐标和半径分别为()
A -32,和194
B .(3,2)和19
C -32,和192
D 和1922.方程x 2+y 2+4x -2y +5m =0表示圆的条件是()
A .14<m <1
B .m >1
C .m <14
D .m <13.M (3,0)是圆x 2+y 2-8x -2y +10=0内一点,过M 点最长的弦所在的直线方程是(
)
A .x +y -3=0
B .x -y -3=0
C .2x -y -6=0
D .2x +y -6=04.圆x 2+y 2-2x +4y +3=0的圆心到直线x -y =1的距离为()
A .2
B .22
C .1
D .25.已知圆x 2+y 2-2ax -2y +(a -1)2=0(0<a <1),则原点O 在()
A .圆内
B .圆外
C .圆上
D .圆上或圆外6.若圆M 在x 轴与y 轴上截得的弦长总相等,则圆心M 的轨迹方程是()A .x -y =0B .x +y =0C .x 2+y 2=0D .x 2-y 2=0二、填空题
7.如果圆的方程为x 2+y 2+kx +2y +k 2=0,那么当圆面积最大时,圆心坐标为________.
8.已知圆C :x 2+y 2+2x +ay -3=0(a 为实数)上任意一点关于直线l :x -y +2=0的对
称点都在圆C上,则a=________.
9.已知圆的方程为x2+y2-6x-8y=0,设该圆过点(3,5)的最长弦和最短弦分别为AC 和BD,则四边形ABCD的面积为________.
三、解答题
10.平面直角坐标系中有A(-1,5),B(5,5),C(6,-2),D(-2,-1)四个点能否在同一个圆上?
11.如果方程x2+y2-2(t+3)x+2(1-4t2)y+16t4+9=0表示一个圆.
(1)求t的取值范围;
(2)求该圆半径r的取值范围.
能力提升
12.求经过两点A(4,2)、B(-1,3),且在两坐标轴上的四个截距之和为2的圆的方程.13.求一个动点P在圆x2+y2=1上移动时,它与定点A(3,0)连线的中点M的轨迹方程.
1.圆的一般方程x2+y2+Dx+Ey+F=0,来源于圆的标准方程(x-a)2+(y-b)2=r2.在应用时,注意它们之间的相互转化及表示圆的条件.
2.圆的方程可用待定系数法来确定,在设方程时,要根据实际情况,设出方程,以便简化解题过程.
3.涉及到的曲线的轨迹问题,要求作简单的了解,能够求出简单的曲线的轨迹方程,并掌握求轨迹方程的一般步骤.
4.1.2
圆的一般方程答案知识梳理
1.(1)D 2+E 2-4F >0-D 2,-12D 2+E 2-4F -D 2,-2+E 2-4F <0
2.>=<
作业设计1.C [-D 2,-r =12
D 2+
E 2-4
F 两公式易得答案.]2.D [表示圆应满足D 2+E 2-4F >0.]
3.B [过M 最长的弦应为过M 点的直径所在直线.]
4.D [先求出圆心坐标(1,-2),再由点到直线距离公式求之.]
5.B [先化成标准方程(x -a )2+(y -1)2=2a ,将O (0,0)代入可得a 2+1>2a (0<a <1),即原点在圆外.]
6.D [圆心应满足y =x 或y =-x ,等价于x 2-y 2=0.]
7.(0,-1)解析r =12k 2+4-4k 2=12
4-3k 2.当k =0时,r 最大,此时圆面积最大,圆的方程可化为x 2+y 2+2y =0,即x 2+(y +1)2=1,圆心坐标为(0,-1).
8.-2
解析1l :x -y +2=0上,即-1+a 2+2=0,解得a =-2.
9.206
解析点(3,5)在圆内,最长弦|AC |即为该圆直径,
∴|AC |=10,最短弦BD ⊥AC ,∴|BD |=46,S 四边形ABCD =12|AC |·|BD |=206.10.解设过A 、B 、C 三点的圆的方程为x 2+y 2+Dx +Ey +F =0,
-5E -F =26D +5E +F =-50D -2E +F =-40=-4
=-2=-20
.
所以过A 、B 、C 三点的圆的方程为x 2+y 2-4x -2y -20=0.
将点D (-2,-1)代入上述方程等式不成立.
故A 、B 、C 、D 四点不能在同一个圆上.
11.解(1)方程x 2+y 2-2(t +3)x +2(1-4t 2)y +16t 4+9=0表示一个圆必须有:D 2+E 2-4F =4(t +3)2+4(1-4t 2)2-4(16t 4+9)>0,
即:7t 2-6t -1<0,
∴-17<t <1.(2)该圆的半径r 满足:r 2=D 2+E 2-4F 4=(t +3)2+(1-4t 2)2-(16t 4+9)
=-7t 2+6t +1=-+167,
∴r 2,167,∴r ,477.12.x 2+y 2+Dx +Ey +F =0,令y =0,得x 2+Dx +F =0,所以
圆在x 轴上的截距之和为x 1+x 2=-D ;令x =0,得y 2+Ey +F =0,所以圆在y 轴上的截距之和为y 1+y 2=-E ;
由题设,x 1+x 2+y 1+y 2=-(D +E )=2,
所以D +E =-2.①
又A (4,2)、B (-1,3)两点在圆上,
所以16+4+4D +2E +F =0,②
1+9-D +3E +F =0,③
由①②③可得D =-2,E =0,F =-12,
故所求圆的方程为x 2+y 2-2x -12=0.
13.解设点M 的坐标是(x ,y ),点P 的坐标是(x 0,y 0).由于点A 的坐标为(3,0)且M 是线段AP 的中点,所以x =x 0+32,y =y 02于是有x 0=2x -3,y 0=2y .因为点P 在圆x 2+y 2=1上移动,所以点P 的坐标满足方程x 20+y 20=1,
则(2x -3)2+4y 2=1,整理得+y 2=14.
所以点M 的轨迹方程为+y 2=14.。