C51串行口及串行通信技术
51单片机的串口通信程序(C语言)
51单片机的串口通信程序(C语言) 51单片机的串口通信程序(C语言)在嵌入式系统中,串口通信是一种常见的数据传输方式,也是单片机与外部设备进行通信的重要手段之一。
本文将介绍使用C语言编写51单片机的串口通信程序。
1. 硬件准备在开始编写串口通信程序之前,需要准备好相应的硬件设备。
首先,我们需要一块51单片机开发板,内置了串口通信功能。
另外,我们还需要连接一个与单片机通信的外部设备,例如计算机或其他单片机。
2. 引入头文件在C语言中,我们需要引入相应的头文件来使用串口通信相关的函数。
在51单片机中,我们需要引入reg51.h头文件,以便使用单片机的寄存器操作相关函数。
同时,我们还需要引入头文件来定义串口通信的相关寄存器。
3. 配置串口参数在使用串口通信之前,我们需要配置串口的参数,例如波特率、数据位、停止位等。
这些参数的配置需要根据实际需要进行调整。
在51单片机中,我们可以通过写入相应的寄存器来配置串口参数。
4. 初始化串口在配置完串口参数之后,我们需要初始化串口,以便开始进行数据的发送和接收。
初始化串口的过程包括打开串口、设置中断等。
5. 数据发送在串口通信中,数据的发送通常分为两种方式:阻塞发送和非阻塞发送。
阻塞发送是指程序在发送完数据之后才会继续执行下面的代码,而非阻塞发送是指程序在发送数据的同时可以继续执行其他代码。
6. 数据接收数据的接收与数据的发送类似,同样有阻塞接收和非阻塞接收两种方式。
在接收数据时,需要不断地检测是否有数据到达,并及时进行处理。
7. 中断处理在串口通信中,中断是一种常见的处理方式。
通过使用中断,可以及时地响应串口数据的到达或者发送完成等事件,提高程序的处理效率。
8. 串口通信实例下面是一个简单的串口通信实例,用于在51单片机与计算机之间进行数据的传输。
```c#include <reg51.h>#include <stdio.h>#define BAUDRATE 9600#define FOSC 11059200void UART_init(){TMOD = 0x20; // 设置定时器1为模式2SCON = 0x50; // 设置串口为模式1,允许接收TH1 = 256 - FOSC / 12 / 32 / BAUDRATE; // 计算波特率定时器重载值TR1 = 1; // 启动定时器1EA = 1; // 允许中断ES = 1; // 允许串口中断}void UART_send_byte(unsigned char byte){SBUF = byte;while (!TI); // 等待发送完成TI = 0; // 清除发送完成标志位}unsigned char UART_receive_byte(){while (!RI); // 等待接收完成RI = 0; // 清除接收完成标志位return SBUF;}void UART_send_string(char *s){while (*s){UART_send_byte(*s);s++;}}void main(){UART_init();UART_send_string("Hello, World!"); while (1){unsigned char data = UART_receive_byte();// 对接收到的数据进行处理}}```总结:通过以上步骤,我们可以编写出简单的51单片机串口通信程序。
第8章51单片机外部串行总线扩展的C51编程
8.1 I2C总线接口技术
• 8.1.1 认识I2C总线 • I2C总线是Philips公司推出的芯片间的 串行传输总线,它采用同步方式接收或 发送信息。 I2C总线以两根连接线实现 全双工同步数据传送,可以极方便地构 成外围器件扩展系统。 • I2C总线的两根线分别为: • ① 串行数据SDA(Serial Data) • ② 串行时钟SCL(Serial Clock)
VCC RP
DS18B20
I/O
单 片 机
GND DQ VCCDQDQ源自…DQ DS18B20
DS18B20 DS18B20
常用的单总线器件:
8.3.2
单总线典型器件DS18B20
8.4
12位串行A/D转换器TLC2543
• TLC2543是TI公司生产的12位串行A/D转 换器,使用开关电容逐次逼近技术完成 A/D转换过程。
【例8-4】模拟输入信号从通道0输入,将 输入的模拟量转换成二进制数在显示器上 显示出来。
【例8-1】AT24C02举例: 将数据“0x55”写入AT24C02,然后将其 读出并发出送到P1口显示。
8.2
•
SPI总线接口技术
• • • •
SPI是Motorola公司推出的一种同步串行 外设接口,允许MCU与各厂家生产的标准外围 设备直接接口,以串行方式交换数据。SPI用 以下3个引脚完成通信: ① 串行数据输出SDO(Serial Data Out),简称SO。 ② 串行数据输入SDI(Serial Data In),简称SI。 ③ 串行数据时钟SCK(Serial Clock)。 另外挂接在SPI总线上的每个从机还需要 一根片选线。
spi是motorola公司推出的一种同步串行外设接口允许mcu与各厂家生产的标准外围设备直接接口以串行方式交换数据
51单片机串口通信(相关例程)

51单片机串口通信(相关例程) 51单片机串口通信(相关例程)一、简介51单片机是一种常用的微控制器,它具有体积小、功耗低、易于编程等特点,被广泛应用于各种电子设备和嵌入式系统中。
串口通信是51单片机的常见应用之一,通过串口通信,可以使单片机与其他外部设备进行数据交互和通信。
本文将介绍51单片机串口通信的相关例程,并提供一些实用的编程代码。
二、串口通信基础知识1. 串口通信原理串口通信是通过串行数据传输的方式,在数据传输过程中,将信息分为一个个字节进行传输。
在51单片机中,常用的串口通信标准包括RS232、RS485等。
其中,RS232是一种常用的串口标准,具有常见的DB-9或DB-25连接器。
2. 串口通信参数在进行串口通信时,需要设置一些参数,如波特率、数据位、停止位和校验位等。
波特率表示在单位时间内传输的比特数,常见的波特率有9600、115200等。
数据位表示每个数据字节中的位数,一般为8位。
停止位表示停止数据传输的时间,常用的停止位有1位和2位。
校验位用于数据传输的错误检测和纠正。
三、串口通信例程介绍下面是几个常见的51单片机串口通信的例程,提供给读者参考和学习:1. 串口发送数据```C#include <reg51.h>void UART_Init(){TMOD = 0x20; // 设置计数器1为工作方式2(8位自动重装) TH1 = 0xFD; // 设置波特率为9600SCON = 0x50; // 设置串口工作方式1,允许串行接收TR1 = 1; // 启动计数器1}void UART_SendChar(unsigned char dat){SBUF = dat; // 发送数据while (!TI); // 等待发送完成TI = 0; // 清除发送完成标志}void main(){UART_Init(); // 初始化串口while (1){UART_SendChar('A'); // 发送字母A}}```2. 串口接收数据```C#include <reg51.h>void UART_Init(){TMOD = 0x20; // 设置计数器1为工作方式2(8位自动重装) TH1 = 0xFD; // 设置波特率为9600SCON = 0x50; // 设置串口工作方式1,允许串行接收TR1 = 1; // 启动计数器1}void UART_Recv(){unsigned char dat;if (RI) // 检测是否接收到数据{dat = SBUF; // 读取接收到的数据 RI = 0; // 清除接收中断标志// 处理接收到的数据}}void main(){UART_Init(); // 初始化串口EA = 1; // 允许中断ES = 1; // 允许串口中断while (1)// 主循环处理其他任务}}```3. 串口发送字符串```C#include <reg51.h>void UART_Init(){TMOD = 0x20; // 设置计数器1为工作方式2(8位自动重装) TH1 = 0xFD; // 设置波特率为9600SCON = 0x50; // 设置串口工作方式1,允许串行接收TR1 = 1; // 启动计数器1}void UART_SendString(unsigned char *str){while (*str != '\0')SBUF = *str; // 逐个发送字符while (!TI); // 等待发送完成TI = 0; // 清除发送完成标志str++; // 指针指向下一个字符}}void main(){UART_Init(); // 初始化串口while (1){UART_SendString("Hello, World!"); // 发送字符串}}```四、总结本文介绍了51单片机串口通信的基础知识和相关编程例程,包括串口发送数据、串口接收数据和串口发送字符串。
51单片机-串行口ppt课件

为发送时CPU是主动的,不会产生重叠错误。
最新课件
21
8.2.2 80C51串行口的控制寄存器
SCON 是一个特殊功能寄存器,用以设定串行口的工 作方式、接收/发送控制以及设置状态标志:
SM0和SM1为工作方式选择位,可选择四种工作方式:
最新课件
22
●SM2,多机通信控制位,主要用于方式2和方式3。 当接收机的SM2=1时可以利用收到的RB8来控制是否 激活RI(RB8=0时不激活RI,收到的信息丢弃; RB8=1时收到的数据进入SBUF,并激活RI,进而在 中断服务中将数据从SBUF读走)。当SM2=0时,不 论收到的RB8为0和1,均可以使收到的数据进入 SBUF,并激活RI(即此时RB8不具有控制RI激活的 功能)。通过控制SM2,可以实现多机通信。
起 空始 闲位
一个字符帧 数据位
校停 验止 位位
空 下一字符 闲 起始位
LSB
MSB
异步通信的特点:不要求收发双方时钟的
严格一致,实现容易,设备开销较小,但 每个字符要附加2~3位用于起止位,各帧 之间还有间隔,因此传输效率不高。
最新课件
9
2、同步通信
同步通信时要建立发送方时钟对接收方时钟的直接控制, 使双方达到完全同步。此时,传输数据的位之间的距离均 为“位间隔”的整数倍,同时传送的字符间不留间隙,即 保持位同步关系,也保持字符同步关系。发送方对接收方 的同步可以通过两种方法实现。
波特率=2SMOD/32×T1的溢出率 = 2SMOD × fosc/[ 32 × 12×(2K-初值)]
最新课件
19
回目录 上页 下页
3、传输距离与传输速率的关系
串行接口或终端直接传送串行信息位流的
第10章串行通信的工作原理与应用

10.2.1 方式0
1.方式0输出 方式0的发送时序见图10-5。
图10-5 方式0发送时序
10.2.1 方式0
1.方式0输出
(2)方式0输出的应用案例 典型应用是串口外接串行输入/并行输出的同步移位寄 存器74LS164,实现并行端口的扩展。 图10-6为串口方式0,通过74LS164输出控制8个外接 LED发光二极管亮灭的接口电路。当串口设置在方式0输出 时,串行数据由RXD端(P3.0)送出,移位脉冲由TXD端 (P3.1)送出。在移位脉冲的作用下,串行口发送缓冲器的 数据逐位地从RXD端串行地移入74LS164中。
10.1.5 特殊功能寄存器PCON
例如,方式1的波特率计算公式为
当SMOD=1时,比SMOD=0时波特率加倍,所以也称 SMOD位为波特率倍增位。
10.1 串行口结构
10.2 串行口的4种工作方式
CONTENTS
目
10.3 波特率的制定方法
录
10.4 串行口应用设计案例
10.2.1 方式0
方式0为同步移位寄存器输入/输出方式。该方式并不用 于两个AT89S51单片机间的异步串行通信,而是用于外接移 位寄存器,用来扩展并行I/O口。
if(nSendByte==0)
nSendByte=1;
//点亮数据是否左移8次?是,重新送点亮数据
SBUF=nSendByte; }
// 向74LS164串行发送点亮数据
TI=0;
RI=0;
}
10.2.1 方式0
1.方式0输出
程序说明:
01 程序中定义了全局变量nSendByte,以便在中断服务程
第10章
串行口的工作原理及应用
单片机原理及接口技术(C51编程)(第2版)
51单片机模拟串口通讯

论坛新老朋友们。
祝大家新年快乐。
在新的一年开始的时候,给大家一点小小的玩意。
工程师经常碰到需要多个串口通信的时候,而低端单片机大多只有一个串行口,甚至没有串口。
这时候无论是选择高端芯片,还是更改系统设计都是比较麻烦的事。
我把以前搞的用普通I/O口模拟串行口通讯的程序拿出来,供大家参考,希望各位兄弟轻点拍砖。
基本原理:我们模拟的是串行口方式1.就是最普通的方式。
一个起始位、8个数据位、一个停止位。
模拟串行口最关键的就是要计算出每个位的时间。
以波特率9600为例,每秒发9 600个位,每个位就是1/9600秒,约104个微秒。
我们需要做一个精确的延时,延时时间+对IO口置位的时间=104微秒。
起始位是低状态,再延时一个位的时间。
停止位是高状态,也是一个位的时间。
数据位是8个位,发送时低位先发出去,接收时先接低位。
了解这些以后,做个IO模拟串口的程序,就是很容易的事。
我们开始。
先上简单原理图:就一个MAX232芯片,没什么好说的,一看就明白。
使用单片机普通I/ O口,232数据输入端使用51单片机P3.2口(外部中断1口,接到普通口上也可以,模拟中断方式的串行口会有用。
呵呵)。
数据输出为P0.4(随便哪个口都行)。
下面这个程序,您只需吧P0.4 和P3.2 当成串口直接使用即可,经过测试完全没有问题.2、底层函数代码如下:sbit TXD1 = P0^4; //定义模拟输出脚sbit RXD1 = P3^2; //定义模拟输入脚bdata unsigned char SBUF1; //定义一个位操作变量sbit SBUF1_bit0 = SBUF1^0;sbit SBUF1_bit1 = SBUF1^1;sbit SBUF1_bit2 = SBUF1^2;sbit SBUF1_bit3 = SBUF1^3;sbit SBUF1_bit4 = SBUF1^4;sbit SBUF1_bit5 = SBUF1^5;sbit SBUF1_bit6 = SBUF1^6;sbit SBUF1_bit7 = SBUF1^7;void delay_bps() {unsigned char i; for (i = 0; i < 29; i++); _nop_(); _nop_();} //波特率9600 模拟一个9600波特率unsigned char getchar2() //模拟接收一个字节数据{while (RXD1);_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_(); delay_bps();SBUF1_bit0 = RXD1; //0delay_bps();SBUF1_bit1 = RXD1; //1delay_bps();SBUF1_bit2 = RXD1; //2delay_bps();SBUF1_bit3 = RXD1; //3delay_bps();SBUF1_bit4 = RXD1; //4delay_bps();SBUF1_bit5 = RXD1; //5delay_bps();SBUF1_bit6 = RXD1; //6delay_bps();SBUF1_bit7 = RXD1; //7delay_bps();return(SBUF1) ; //返回读取的数据}void putchar2(unsigned char input) //模拟发送一个字节数据{SBUF1 = input;TXD1 = 0; //起始位delay_bps();TXD1 = SBUF1_bit0; //0delay_bps();TXD1 = SBUF1_bit1; //1delay_bps();TXD1 = SBUF1_bit2; //2delay_bps();TXD1 = SBUF1_bit3; //3delay_bps();TXD1 = SBUF1_bit4; //4delay_bps();TXD1 = SBUF1_bit5; //5delay_bps();TXD1 = SBUF1_bit6; //6delay_bps();TXD1 = SBUF1_bit7; //7delay_bps();TXD1 = 1; //停止位delay_bps();}3、实现串行通讯。
C51单片机知识总结

C51单片机知识总结C51单片机知识总结单片机I/O口的使用51单片机总共有P0、P1、P2、P3四个8位双向输入输出端口,每个端口都有锁存器、输出驱动器和输入缓冲器。
4个I/O端口都能作输入输出口用,其中P0和P2通常用于对外部存储器的访问。
在无片外扩展存储器的系统中,这4个端口的每一位都可以作为准双向通用I/O端口使用。
在具有片外扩展存储器的系统中,P2口作为高8位地址线,P0口分时作为低8位地址线和双向数据总线。
下图为P0口的某位P0.n(n=0~7)结构图,它由一个输出锁存器、两个三态输入缓冲器和输出驱动电路及控制电路组成。
从图中可以看出,P0口既可以作为I/O 用,也可以作为地址/数据线用。
①输出时CPU发出控制电平“0”封锁“与”门,将输出上拉场效应管T1截止,同时使多路开关MUX把锁存器与输出驱动场效应管T2栅极接通。
故内部总线与P0口同相。
由于输出驱动级是漏极开路电路,若驱动NMOS或其它拉流负载时,需要外接上拉电阻。
P0的输出级可驱动8个LSTTL负载。
②输入时----分读引脚或读锁存器读引脚:由传送指令(MOV)实现;下面一个缓冲器用于读端口引脚数据,当执行一条由端口输入的指令时,读脉冲把该三态缓冲器打开,这样端口引脚上的数据经过缓冲器读入到内部总线。
读锁存器:有些指令如:ANLP0,A称为“读-改-写”指令,需要读锁存器。
上面一个缓冲器用于读端口锁存器数据。
**原因:如果此时该端口的负载恰是一个晶体管基极,且原端口输出值为1,那么导通了的PN结会把端口引脚高电平拉低;若此时直接读端口引脚信号,将会把原输出的“1”电平误读为“0”电平。
现采用读输出锁存器代替读引脚,图中,上面的三态缓冲器就为读锁存器Q端信号而设,读输出锁存器可避免上述可能发生的错误。
**P0口必须接上拉电阻;在读信号之前数据之前,先要向相应的锁存器做写1操作的I/O口称为准双向口;三态输入缓冲器的作用:(ANLP0,A)准双向口:从图中可以看出,在读入端口数据时,由于输出驱动FET并接在引脚上,如果T2导通,就会将输入的高电平拉成低电平,产生误读。
51单片机串口通信实例
51单片机串口通信实例一、原理简介51 单片机内部有一个全双工串行接口。
什么叫全双工串口呢?一般来说,只能接受或只能发送的称为单工串行;既可接收又可发送,但不能同时进行的称为半双工;能同时接收和发送的串行口称为全双工串行口。
串行通信是指数据一位一位地按顺序传送的通信方式,其突出优点是只需一根传输线,可大大降低硬件成本,适合远距离通信。
其缺点是传输速度较低。
与之前一样,首先我们来了解单片机串口相关的寄存器。
SBUF 寄存器:它是两个在物理上独立的接收、发送缓冲器,可同时发送、接收数据,可通过指令对SBUF 的读写来区别是对接收缓冲器的操作还是对发送缓冲器的操作。
从而控制外部两条独立的收发信号线RXD(P3.0)、TXD(P3.1),同时发送、接收数据,实现全双工。
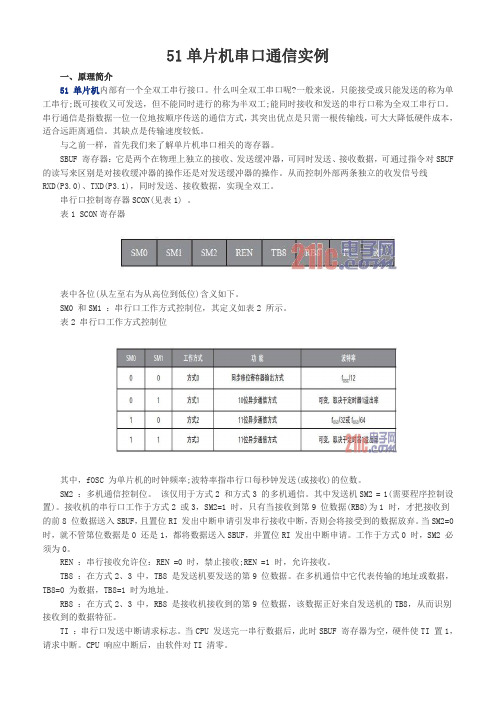
串行口控制寄存器SCON(见表1) 。
表1 SCON寄存器表中各位(从左至右为从高位到低位)含义如下。
SM0 和SM1 :串行口工作方式控制位,其定义如表2 所示。
表2 串行口工作方式控制位其中,fOSC 为单片机的时钟频率;波特率指串行口每秒钟发送(或接收)的位数。
SM2 :多机通信控制位。
该仅用于方式2 和方式3 的多机通信。
其中发送机SM2 = 1(需要程序控制设置)。
接收机的串行口工作于方式2 或3,SM2=1 时,只有当接收到第9 位数据(RB8)为1 时,才把接收到的前8 位数据送入SBUF,且置位RI 发出中断申请引发串行接收中断,否则会将接受到的数据放弃。
当SM2=0 时,就不管第位数据是0 还是1,都将数据送入SBUF,并置位RI 发出中断申请。
工作于方式0 时,SM2 必须为0。
REN :串行接收允许位:REN =0 时,禁止接收;REN =1 时,允许接收。
TB8 :在方式2、3 中,TB8 是发送机要发送的第9 位数据。
在多机通信中它代表传输的地址或数据,TB8=0 为数据,TB8=1 时为地址。
RB8 :在方式2、3 中,RB8 是接收机接收到的第9 位数据,该数据正好来自发送机的TB8,从而识别接收到的数据特征。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
整理ppt
04.03.2021
3
7.1.1 数据通信
• 并行通信是指数据的各位同时进行传送(发送 或接收)的通信方式。
• 优点:传送速度快; • 缺点:数据有多少位,就需要多少根传送线。
返回
整理ppt
04.03.2021
4
接 收 设 备
04.03.2021
8位同时传送 1
0
1
发
0
1
送
1 0
设
0
备
返回
整理ppt
04.03.2021
13
1.异步通信
• 起始位(0)信号只占用一位,用来通知接收设备一个待接收的字符开始到达。线路上在不 传送字符时应保持为1。接收端不断检测线路的状态,若连续为1以后又测到一个0,就知道 发来一个新字符, 应马上准备接收。字符的起始位还被用作同步接收端的时钟,以保证以 后的接收能正确进行。
1.异步通信:数据是一帧一帧传送的。
返回
整理ppt
04.03.2021
11
图7-3 异步通信数据格式 整理ppt
04.03.2021
12
1.异步通信
• 在帧格式中,一个字符由四个部分组成:起始位、 数据位、奇偶校验位和停止位。首先是一个起始 为(0),然后是5位--8位数据(规定低位在前, 高位在后),接下来是奇偶校验位(可省略), 最后是停止位(1)。
• 在同步传送时,要求用时钟来实现发送端与接收 端之间的同步。为了保证接收正确无误,发送方除 了传送数据外,还要同时传送时钟信号。
• 同步传送可以提高传输速率(达56kb/s或更高), 但硬件比较复杂。
返回
整理ppt
04.03.2021
17
3.波特率(Baud rate)
• 波特率,即数据传送速率,表示每秒钟传送二进 制代码的位数,它的单位是b/s。
3. 全双向(全双工)配置,允许同时双向传送 数据,因此,全双工配置是一对单向配置,
它要求两端的通信设备都具有完整和独立的
发送和接受能力。
返回
整理ppt
04.03.2021
9
图7-2 串行通信中的数据传送方式
整理ppt
04.03.2021
10
7.1.3 异步通信和同步通信
• 串行通信有两种基本通信方式,即异步 通信和同步通信。
返回
整理ppt
04.03.2021
2
7.1.1 数据通信
• 在实际工作中,计算机的CPU与外部设备之间 常常要进行信息交换,一台计算机与其他计算 机之间也往往要交换信息,所有这些信息交换 均可称为通信。
• 通信方式有两种,即并行通信和串行通信。 • 通常根据信息传送的距离决定采用哪种通信方
式。
返回
返回
整理ppt
04.03.2021
15
图7-4 同步通信数据格式
返回
整理ppt
04.03.2021
16
2.同步通信
• 同步字符的插入可以是单同步字符方式或双同步字符方式,如图7-4所
示,然后是连续的数据块。同步字符可以由用户约定,当然也可以采 用ASCII码中规定的SYNC代码,即16H。按同步方式通信时,先发送 同步字符,接收方检测到同步字符后,即准备接收数据。
询问
应答
整理ppt
5
7.1.1 数据通信
• 串行通信指数据是一位一位按顺序传送的 通信方式。
• 它的突出优点:只需一对传输线(利用电 话线就可作为传输线),这样就大大降低 了传送成本,特别适用于远距离通信;
• 缺点:传送速度较低。
返回
整理ppt
04.03.2021
6
接
发
收
D0
D7
送
设 备
8位顺次传送
返回
整理ppt
04.03.2021
20
1.串←→并转换与设备同步
• 假设数据传送速率是120字符/s,而每个字符格式 包含10个代码位(1个起始位、1个终止位、8个 数据位)。这时,传送的波特率为:
10b/字符×120字符/s=1200b/s
返回
整理ppt
04.03.2021
18
3.波特率(Baud rate)
• 每一位代码的传送时间Td为波特率的倒数。
Td=1b/(1200bs-1)=0.833ms
• 异步通信的传送速率在50b/s--19200b/s之间。
返回
整理ppt
04.03.2021
19
7.1.4 串行通信的过程及通信协议
1.串←→并转换与设备同步 两个通信设备在串行线路上成功地实现通 信必须解决两个问题:
一是串←→并转换,即如何把要发送的并行数 据串行化,把接收的串行数据并行化;
二是设备同步,即同步发送设备与接收设备的 工作节拍,以确保发送数据在接收端被正确读 出。
第七章 89C51串行口及串行通信技术
7.1 串行通信基本知识 7.2 串行口及应用 7.3 89C51与89C51点对点异步通信 7.4 89C51与PC机间通信 7.5 思考题与习题
பைடு நூலகம்返回
整理ppt
04.03.2021
1
7.1 串行通信基本知识
7.1.1 数据通信 7.1.2 串行通信的传输方式 7.1.3 异步通信和同步通信 7.1.4 串行通信的过程及通信协议
接收端收到停止位后,知道上一字符已传送完毕,同时,也为接收下一个字符做好准备--只 要再接收到0,就是新的字符的起始位。若停止位以后不是紧接着传送下一个字符,则使线 路电平保持为高电平(逻辑1)。
返回
整理ppt
04.03.2021
14
2.同步通信
• 同步通信中,在数据开始传送前用同步字符来指
示(常约定1个--2个),并由时钟来实现发送端 和接收端同步,即检测到规定的同步字符后,下 面就连续按顺序传送数据,直到通信告一段落。 • 同步传送时,字符与字符之间没有间隙,也不用 起始位和停止位,仅在数据块开始时用同步字符 SYNC来指示。
• 起始位后面紧接着是数据位,它可以是5位(D0--D4)、6位、7位或8位(D0--D7)。 • 奇偶校验(D8)只占一位,但在字符中也可以规定不用奇偶校验位,则这一位就可省去。
也可用这一位(1/0)来确定这一帧中的字符所代表信息的性质(地址/数据等)。 • 停止位用来表征字符的结束,它一定是高电位(逻辑1)。停止位可以是1位、1.5位或2位。
设 备
04.03.2021
整理ppt
7
图7-1 数据通信方式
返回
整理ppt
04.03.2021
8
7.1.2 串行通信的传输方式
串行通信的传送方向通常有三种:
1. 单向(或单工)配置,只允许数据向一个方 向传送;
2. 半双向(或半双工)配置,允许数据向两个 方向中的任一方向传送,但每次只能有一个
站点发送;