井眼轨迹误差椭球三维可视化方法研究pdf
密集井井眼轨迹碰撞检测及三维可视化系统研究

密集井井眼轨迹碰撞检测及三维可视化系统研究在钻井平台位置有限和密集井网条件下,井眼轨迹之间间距较小,垂向穿越可利用空间不足,加大了钻井工程设计、施工的风险。
为了能够确保施工顺利进行,以三维可视化方式直观展示井眼轨迹数据,
通过计算显示井眼轨迹穿越情况以及已钻井眼轨迹与设计井井眼轨
迹之间的防碰距离,确保钻井技术人员在施工时能够及时掌握井眼轨迹钻进情况并对其参数进行调整,对于保证成功钻井尤为重要。
本文结合石油企业的实际业务需求,研究并实现了密集井井眼轨迹碰撞检测及三维可视化系统。
首先,在总结现阶段已有的井眼轨迹碰撞检测方法特点的基础上,采用最近距离扫描法作为该系统的井眼轨迹碰撞检测方法,建立了井眼轨迹碰撞风险评估模型,提出了综合考虑井眼
轨迹碰撞发生概率和后果严重性两方面因素的井眼轨迹碰撞风险分
级的安全评估方法,并通过钻井现场实例对这些方法进行了验证;其次,构建了井眼轨迹三维可视化模型,利用最小曲率法对井眼轨迹数
据进行测斜计算,使用OpenGL三维可视化技术进行井眼轨迹绘制,并在三维网格中显示出多条吻合测井数据的井眼轨迹;最后,采用C#语言、.NET平台,并结合SQL Server数据库搭建了该系统的三层C/S
架构,实现了井场数据管理、网格划分计算、井眼轨迹碰撞检测计算、三维轨迹显示和数据一致性校验等主要功能。
本文研发的系统能够为钻井技术人员提供井眼轨迹数据管理、网格划分、工程计算、图形显示和数据迁移等服务,可以帮助设计者提出更有效的防碰设计方法,
优化井眼轨迹设计,以此来降低密集型井区井眼轨迹碰撞风险,提高
钻井经济效益。
井眼轨迹三维可视化系统中实时数据显示模块的设计与开发的开题报告

井眼轨迹三维可视化系统中实时数据显示模块的设计与开发的开题报告一、课题背景目前,石油钻井行业已经进入了智能化时代。
钻井现场的人员需要实时监测井口、井身、井底等数据,并对数据进行可视化展示和分析,以便钻井人员能够更好地理解井内情况,从而决定接下来的钻进方向和钻进深度。
井眼轨迹三维可视化系统是钻井行业中的一个重要工具,它能够实时监测井眼轨迹数据并进行三维可视化展示,方便钻井人员对井内情况进行分析和理解。
二、课题内容本课题旨在设计和开发一个实时数据显示模块,用于井眼轨迹三维可视化系统中的井眼轨迹数据的实时显示。
该模块需要实现以下功能:1. 井眼轨迹三维可视化展示。
可以实时显示井眼轨迹数据的三维可视化展示,包括井口、井身、井底等数据。
2. 实时数据显示。
可以实时显示井眼轨迹数据的实时数据,包括井深、井斜、方位等数据。
3. 数据分析和处理。
可以对井眼轨迹数据进行分析和处理,比如计算方位角、井深等数据,并将结果显示出来。
三、课题意义1. 提高钻井人员的工作效率。
实时数据显示模块可以帮助钻井人员更好地理解井内情况,从而更好地决定钻进方向和钻进深度,提高钻井人员的工作效率。
2. 提高钻井安全性。
实时数据显示模块可以帮助钻井人员更好地了解井内情况,从而更好地避免钻井事故的发生,提高钻井安全性。
四、课题方法1. 确定数据格式和传输方式。
根据井眼轨迹数据的特点设计数据格式和传输方式,以便实现数据的实时传输和展示。
2. 设计数据显示界面。
根据用户需求设计数据显示界面,使得用户可以方便地查看和分析井眼轨迹数据。
3. 实现数据分析和处理。
根据用户需求实现数据分析和处理功能,包括计算方位角、井深等数据,并将结果显示出来。
五、预期成果1. 设计和开发一个实时数据显示模块。
该模块可以实时显示井眼轨迹数据的实时数据和三维可视化展示,满足钻井人员对井内情况的监测和分析需求。
2. 对井眼轨迹数据进行分析和处理。
可以计算方位角、井深等数据,并将结果显示出来。
石油钻井井眼轨迹三维可视化建模
石油钻井井眼轨迹三维可视化建模作者:张敏来源:《电脑知识与技术》2011年第13期摘要:为便于钻井人员直观地观察、分析及有效地控制井眼轨迹,该文从基于切片建立三维几何模型的思路出发,根据不规则三角网(TIN)构网和三维几何变换提出了一个新的筒状井眼轨迹的三维可视化建模方法。
该方法不需要对井眼轨迹弯曲处进行插值圆滑处理,高效快捷地实现了筒状井眼轨迹的无缝连接。
详细描述了井眼轨迹的建模方法,为“临境”观察、控制石油钻采的三维可视化打下了基础。
关键词:井眼轨迹;三维建模;三维可视化;切片中图分类号:TP391文献标识码:A文章编号:1009-3044(2011)13-3182-02Modeling of 3D Visualization for Wellbore TrajectoryZHANG Min(Xi'an Shiyou University, Institute of Computer, Xi'an 710065, China)Abstract: In order to directly observe, analyze and effectively control the drilling trajectory for the drill staff, this paper puts forward a new method for the tubular wellbore trajectory which bases on slices modeling, Triangulated Irregular Network (TIN) and 3D geometric transformation. The method implements the 3D tubular wellbore trajectory seamless connection efficiently and conveniently without interpolation smoothing treatment ofthe wellbore trajectory's bender. It also details in the wellbore trajectory modeling and also lays the foundation for the "person on the scene" observation and controlling three-dimensional visualization of oil drilling.Key words: wellbore trajectory; 3D modeling; 3D visualization; slices近年来,随着计算机图形学和计算机技术的发展,计算机可视化技术不断普及,创建“虚拟世界”也不断掀起热潮,而建立具有真实感的三维可视化场景是建设“虚拟世界”的重要一步。
井眼轨迹误差椭圆柱的构建方法[发明专利]
![井眼轨迹误差椭圆柱的构建方法[发明专利]](https://img.taocdn.com/s3/m/d24e5e2515791711cc7931b765ce0508763275c1.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201810865042.X(22)申请日 2018.08.01(71)申请人 中国石油化工股份有限公司地址 100728 北京市朝阳区朝阳门北大街22号申请人 中国石油化工股份有限公司石油工程技术研究院(72)发明人 刘修善 (74)专利代理机构 北京聿华联合知识产权代理有限公司 11611代理人 朱绘 颜燕红(51)Int.Cl.E21B 47/022(2012.01)(54)发明名称井眼轨迹误差椭圆柱的构建方法(57)摘要本发明提供一种井眼轨迹误差椭圆柱的构建方法,其包括按行业规程采用测量仪器获得井眼轨迹的测斜数据,基于ISCWSA标准及模型求取井口坐标系NEH下各测点处的协方差矩阵,协方差矩阵表征一个误差椭球族,误差椭球族中的各个不同误差椭球包含井眼轨迹误差的概率不同;根据实际钻井工程要求,选取放大系数以唯一确定误差椭球;基于所误差椭球的协方差矩阵确定误差椭球的尺寸和姿态;根据椭圆柱面与椭球面的相切条件,基于误差椭球的尺寸和姿态,确定误差椭圆柱的横截面椭圆;将横截面椭圆沿井眼轨迹串联起来,构成井眼轨迹的误差椭圆柱,用以表征和评价所述井眼轨迹沿井深的误差和变化。
权利要求书4页 说明书11页 附图3页CN 110847893 A 2020.02.28C N 110847893A1.一种井眼轨迹误差椭圆柱的构建方法,其特征在于,所述方法包括:按行业规程采用测量仪器获得井眼轨迹的测斜数据,基于ISCWSA标准及模型求取井口坐标系NEH下各测点处的协方差矩阵,所述协方差矩阵表征一个误差椭球族,所述误差椭球族中的各个不同误差椭球包含井眼轨迹误差的概率不同;根据实际钻井工程要求的所述概率,选取放大系数以唯一确定所述误差椭球;基于所述误差椭球的协方差矩阵确定所述误差椭球的尺寸和姿态,其中,所述误差椭球的尺寸和姿态分别用三个主轴半径和三个姿态角来表征;根据椭圆柱面与椭球面的相切条件,基于所述误差椭球的尺寸和姿态,确定误差椭圆柱的横截面椭圆;将所述横截面椭圆沿井眼轨迹串联起来,构成井眼轨迹的误差椭圆柱,用以表征和评价所述井眼轨迹沿井深的误差和变化。
基于VR三维井眼轨迹的可视化
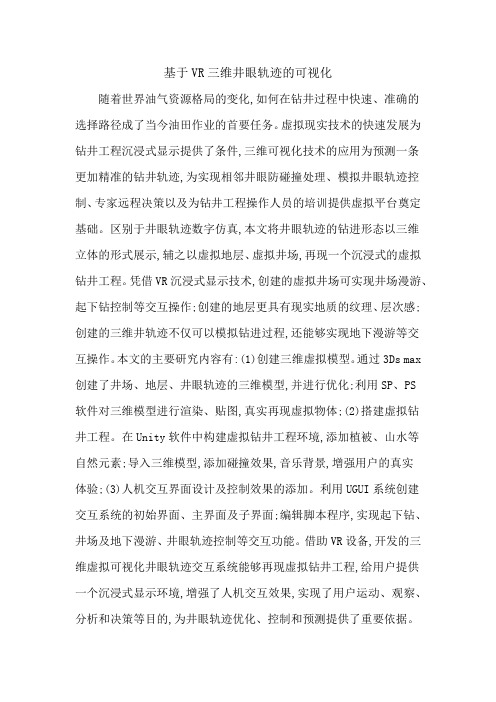
基于VR三维井眼轨迹的可视化
随着世界油气资源格局的变化,如何在钻井过程中快速、准确的
选择路径成了当今油田作业的首要任务。
虚拟现实技术的快速发展为钻井工程沉浸式显示提供了条件,三维可视化技术的应用为预测一条
更加精准的钻井轨迹,为实现相邻井眼防碰撞处理、模拟井眼轨迹控制、专家远程决策以及为钻井工程操作人员的培训提供虚拟平台奠定基础。
区别于井眼轨迹数字仿真,本文将井眼轨迹的钻进形态以三维
立体的形式展示,辅之以虚拟地层、虚拟井场,再现一个沉浸式的虚拟钻井工程。
凭借VR沉浸式显示技术,创建的虚拟井场可实现井场漫游、起下钻控制等交互操作;创建的地层更具有现实地质的纹理、层次感;创建的三维井轨迹不仅可以模拟钻进过程,还能够实现地下漫游等交
互操作。
本文的主要研究内容有:(1)创建三维虚拟模型。
通过3Ds max 创建了井场、地层、井眼轨迹的三维模型,并进行优化;利用SP、PS
软件对三维模型进行渲染、贴图,真实再现虚拟物体;(2)搭建虚拟钻
井工程。
在Unity软件中构建虚拟钻井工程环境,添加植被、山水等
自然元素;导入三维模型,添加碰撞效果,音乐背景,增强用户的真实
体验;(3)人机交互界面设计及控制效果的添加。
利用UGUI系统创建
交互系统的初始界面、主界面及子界面;编辑脚本程序,实现起下钻、井场及地下漫游、井眼轨迹控制等交互功能。
借助VR设备,开发的三维虚拟可视化井眼轨迹交互系统能够再现虚拟钻井工程,给用户提供
一个沉浸式显示环境,增强了人机交互效果,实现了用户运动、观察、分析和决策等目的,为井眼轨迹优化、控制和预测提供了重要依据。
井眼轨迹不确定性分析方法的探讨

3董本京,1964年生;1985年毕业于大庆石油学院开发系钻井专业,现为石油大学(北京)96级博士生;主要研究井眼轨迹的测量误差分析。
地址:(102200)北京昌平县水库路。
电话:(010)62327731转6060。
井眼轨迹不确定性分析方法的探讨董本京3 高德利 柳贡慧(石油大学・北京) 董本京等.井眼轨迹不确定性分析方法的探讨.天然气工业,1999;19(4):59~63摘 要 文章讨论了经典的WdW 井眼测量误差分析理论的八项缺陷和不足,认为该理论不再适合于现代井眼轨迹测量误差的分析工作。
根据现代井眼轨迹测量特点,从两种角度总结和概括了井眼轨迹测量误差的种类,从误差与仪器的内在关系上,可分为仪器相关误差和非相关误差;从误差本身的统计性质上,可分为系统误差、随机误差和粗差。
针对目前最常用的,基于固态磁力或速率陀螺传感器的测量工具,进一步地描述了其模块意义上的七个独立误差根源,即原始传感器输出值误差、测量深度、磁偏角误差、磁干扰误差、磁化纠正误差、钻具组合下垂误差以及不同轴误差。
之后文中又探讨了衡量井眼位置不确定性的重要指标—协方差矩阵的构造方法,并在此基础上介绍了如何确定井眼每一测点的误差椭球或椭圆及相应的置信水平。
最后探讨了这套方法在评价井眼轨迹交碰概率上的应用。
主题词 钻井 井眼 测量 误差 分析方法经典的WdW 理论的缺陷和限制WdW 误差扩散模型发表于1981年。
该理论所研究的对象是基于磁罗盘或自由陀螺的仪器测量垂直井和中等斜度井时系统误差引起的井眼位置不确定性。
因首次提出系统误差在测量误差中占主导地位,该理论很快被井眼测量界所接受并被认为是工业标准。
其误差模型算法被编制成商业软件包并且得到广泛应用。
最近几年,随着大位移井和水平井技术的普及和推广,测量工具的不断改进以及对井眼轨迹测量精度要求的不断提高,人们发现WdW 理论越来越不适应分析现代工况下的测量误差扩散规律了,所存在的主要限制和缺陷如下:(1)只考虑系统误差而忽略随机误差的假设不适合于三维井眼轨迹。
井眼轨迹 计算方法(一)

井眼轨迹计算方法(一)井眼轨迹计算概述井眼轨迹计算是石油勘探和钻井工程领域中的重要技术之一。
它用于确定钻井孔的几何形状,以及记录井眼的位置和方向。
本文将介绍井眼轨迹计算的各种方法。
传统方法传统的井眼轨迹计算方法主要包括:1.平面梯形法:将井眼轨迹划分为一系列的小梯形,通过计算每个小梯形的底边和两侧斜边的长度,进而计算出井眼的轨迹。
2.立体三角法:将井眼轨迹划分为一系列的小三角形,通过计算每个小三角形的三条边的长度和夹角,进而计算出井眼的轨迹。
3.公式推导法:通过对井眼轨迹的方程进行推导和求解,得到井眼的位置和方向。
这种方法通常需要复杂的计算和数学推理。
传统方法的优点是可靠且易于理解,但缺点是计算量较大且需要繁琐的手工操作。
为了提高计算效率和精度,近年来出现了一些新的方法。
数值模拟方法数值模拟方法利用计算机对井眼轨迹进行模拟和计算。
常见的数值模拟方法包括:1.有限差分法:将井眼轨迹划分为一系列的井段,在每个井段上进行有限差分的计算,以得到井段的位置和方向。
这种方法可以实现高精度的计算,但需要较高的计算资源。
2.有限元法:将井眼轨迹的计算问题转化为一个边值问题,通过对问题的离散和求解,得到井眼的位置和方向。
有限元法可以适应各种复杂的井眼形状,但需要较长的计算时间。
3.其他方法:还有一些其他的数值模拟方法,如边界元法、神经网络等,它们采用不同的物理模型和计算算法,以求得更加准确和高效的井眼轨迹计算结果。
数值模拟方法的优点是计算速度快且精度高,但需要具备一定的计算机编程和数值计算的知识。
发展趋势随着计算机技术的发展和计算资源的提升,井眼轨迹计算方法也在不断演进。
未来,我们可以期待以下的发展趋势:1.算法优化:通过算法的优化和改进,提高计算速度和精度,降低计算资源的要求。
2.深度学习:利用深度学习等人工智能技术,从大量的井眼数据中学习和归纳规律,以实现更加准确和高效的井眼轨迹计算。
3.云计算:将井眼轨迹计算任务移至云端,在云计算平台上进行并行计算,以提高计算效率。
钻井井(孔)眼轨迹计算与图形绘制软件的设计

钻井井(孔)眼轨迹计算与图形绘制软件的设计作者:张继豹谢晋来源:《电脑知识与技术》2009年第26期摘要:钻井井(孔)眼轨迹计算与图形绘制软件是为钻井行业设计的,采用了VB6.0编程并结合AutoCAD二次开发(VBA)的方法,完成了通过软件读取井眼轨迹基本参数(原始测斜数据),计算出井眼轨迹计算参数并绘制出井眼轨迹图形。
文章简要介绍了钻井井(孔)眼轨迹计算与图形绘制软件的设计思路、功能和实现的核心程序以及软件运行过程。
关键词:钻井;井眼轨迹;软件中图分类号:TP311文献标识码:A文章编号:1009-3044(2009)26-7543-02The Design of Well Course's Computing and Drawing SoftwareZHANG Ji-bao1, XIE Jin2(1.Hubei Academy of Geological Exploration of Coal, Wuhan 430070, China; 2.Shicaocun Coal Mine of Ningmei Shenhua Group, Yinchuan 751400, China)Abstract: The well course's computing and drawing software is designing for drilling industry, the author adopted VB6.0 and the Redevelop Technology of AutoCAD have compiled read well course basal parameter by the software, then compute well course computational parameter and have well course graph drawn. The artist simply introduces the design thinking, function, core procedure and running process of well course's computing and drawing software.Key words: bore well; well course; software随着油气井钻井深度的加大,钻井技术、井眼设计轨道的多样化,涌现出多种井眼轨迹计算方法和图形表达方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 a j ·珗 aT σ j ·珗 Σ j j =1
( 16 )
Δf j ( 17 ) λ' aj σ j 为误差源 j 的标准偏差, 按照误差理论, 每个误差源的误差独立地服从正态分布 , 其中, λ ' 为置信因子; 珗 代表第 j 个误差源在当前测段上坐标系向仪器坐标系上转换的矢量 . h11 h12 h13 H 的计算过程见第 2 节. 令 H = h21 h22 h23 , h31 h32 h33 σj = 1. 2 计算公式 根据中心极限定理, 服从正态分布的多个误差, 累积起来同样服从正态分布. 利用正态分布密度函数, : 分布概率密度计算公式
0 引 言
井眼轨道控制是钻井技术中的重要环节 , 也是钻井工程经典研究内容. 然而, 井眼轨道控制是一个多 扰动控制过程, 要使实钻轨迹与设计轨道完全吻合几乎是不可能的 . 在这种情况下, 提前预测井眼轨迹的 [1 , 2, 8, 11 ] . 前进方向, 以便及早做出应对, 能够提高钻井准确率 众多的研究文献表明, 测量误差是井眼轨迹误差的主要组成部分 . 常用的测斜测量工具主要有两种: 固态磁力仪和速率陀螺仪. 与这两种测量工具有关的物理误差源主要有 : 陀螺仪初始参照误差、 钻柱磁化 [3 ] 误差、 陀螺仪框架误差、 井斜测量精度误差、 深度测量误差、 不同轴误差等. 柳贡慧等人 针对井眼轨迹的 , 该研究仅针对单个测 误差椭球给出计算方法 并分析了井眼位置落入相应误差椭球 ( 圆 ) 内的概率. 但是, [4 ] 点进行, 缺少具体的计算机图形化显示. 陈炜卿 在其博士论文中将误差椭球作为误差的一个因素进行 并进行了图形化的展示, 但是缺少针对误差发展趋势的预判 . 了讨论, [5 ~ 7 ] , 三维可视化技术在钻井工程中也得到了大量的应用 但是, 这些应用大都集中在仿真、 模拟等方 [9 , 10 ] . 本文结合了钻井工程计算与三维可视化技术 , 面 改进了误差椭球计算算法, 加入绕主法线旋转角度, 使得误差椭圆角度更准确. 同时针对计算机的离散特性, 设计了误差椭球算法的计算机实现 . 在此基础上, , 实现了三维椭球的可视化 利用连续误差椭球来表示整个井眼轨迹的误差 , 能够直观地显示井眼轨迹前进
N) 、 var( E , E) 、 var( D, D) 表示北方向、 E) 、 cov( E , D) 、 式中 var( N, 东方向和垂直方向上的方差, 而 cov( N, cov( D, N) 表示他们之间的协方差. 又根据协方差矩阵的定义: T H = E{ [ r - E ( Δ珒 r) ] ·[ r - E ( Δ珒 r) ] } ( 12 ) Δ珒 Δ珒 式中:
Abstract: By verifying the well bore position and predicting the error of well trajectory, the direction of well trajectory is better controlled. Taking account of the facet of system and instruments which influence the error of well trajectory, three semiaxises of error ellipsoid are calculated. Angle rotating based on normal direction is adopted to improve the accuracy of the ellipsoid. Using the technology of OpenGL, 3D visualization of error ellipsoid is realized,which can show the size and direction of well trajectory error, and provide references on controlling well trajectory. Key words: well trajectory; error ellipsoid; visualization
第3 期
苏
9
斐, 高德利, 赵全庆: 井眼轨迹误差椭球三维可视化方法研究
3
r = Δ珒 v i ( l) dl Δ m j · ∫ w j ( l ) ·珒 ∑ j =1 珗 aj = 于是协方差矩阵变换为: H = ( j = 1, 2, 3, 4, 5; i = 1, 2, 3) ( 13 )
H r r Δ珒 e - 2 Δ珒 f ( Δ珒 rg ) = 3 ( 2 π) 2 槡 | H|
1
(
g )T - 1 (
g)
( 18 )
其等概率密度面为: r g ) T H - 1 ( Δ珒 r g ) = λ2 ( λ 为置信因子) ( Δ珒 此方程恰好表示了一个椭球表面 , 由此引出了误差椭球的概念, 取椭球水平方向上的截面即为误差椭 E、 H 三个方向上的协方差矩阵. 假设协方差矩阵 H 的特征值为 λ1 、 圆. 矩阵 H 代表井眼地理坐标 N、 λ2 、 λ3 ,
其中: Δ f j 表示第 j 个物理误差源的误差限( 由测量仪器的误差参数决定) ; w j ( l ) 表示与实际测量地点和时间有关的误差影响权重函数 ; 珒 v i ( l ) 表示各测量误差的作用方向, 是单位矢量, 一共有三个方向: 井眼轴线方向:
T 珒 v1 = ( sina·cosΦ, sina·Φ, cosa)
第 36 卷 第 3 期 2011 年 6 月
昆明理工大学学报( 自然科学版) Journal of Kunming University of Science and Technology ( Natural Science Edition)
Vol. 36 No. 3 Jun. 2011
doi: 10. 3969 / j. issn. 1007 - 855x. 2011. 03. 001
在每个测段上, 上式中的积分计算如下: v ( l) dl ∫ w ( l ) ·珒
ΔL j i
( 14 )
Σj Σ k
珗 a j ·珗 aT [ } Δ f j - E ( Δ f j) ] Δf k - E( Δf k ) ] k · E{ [
5
( 15 )
同时, 各仪器测量时互相不影响, 因此, 各项误差源 Δ f j 之间不相关: H =
井眼轨迹误差椭球三维可视化方法研究
苏
1, 2 1 2 斐 , 高德利 , 赵全庆
( 1. 中国石油大学 石油工程学院, 北京 100024 ; 2. 中国石油信息技术服务中心, 北京 100007 )
摘要: 通过井眼位置进行监测, 对轨道偏移进行提前预测, 能够很好地对井眼轨道控制提供判断依据. 综合考虑导致轨道偏移的系统、 仪器等各方面因素, 对误差椭球三个半轴的计算进行研究, 加入绕主法 线旋转角度, 使得误差椭圆角度更准确. 利用 OpenGL 技术, 实现了误差椭球的三维可视化, 从而能够 为井眼轨道控制以及井眼防碰提供参考. 直观地看出误差的大小以及下一步发展方向, 关键词: 井眼轨迹; 误差椭球; 可视化 中图分类号: TP393. 103 文献标识码: A 文章编号: 1007 - 855X( 2011 ) 03 - 0001 - 04
2 | λ2 | λ2 、 | λ3 | λ2 , 则椭球的半轴长度为 | λ1 | λ 、 方向为三个特征值对应的特征向量 .
2 误差椭球算法的实现
有了上述的推导过程, 就可以把该过程转换为算法并在计算机上实现 , 算法的过程如下: aj = 步骤一: 遍历原始测斜数据, 利用公式 珗
5
v ( l) dl 计算 珗 a; ∫ w ( l ) ·珒
ΔL j i j
步骤二: 按公式 H =
2 a j ·珗 aT σ j ·珗 Σ j 计算协方差矩阵 H ; j =1
步骤三: 计算步骤二中协方差矩阵 H 的特征值, 从而计算椭球的三轴长度. 步骤一中包含积分过程, 而测斜数据是离散的点, 所以要将积分过程离散化, 用累加来“模拟 ”积分,
n
aj = 即珗
Method Research on Visualization of Well Trajectory Error Ellipsoid
2 SU Fei1, ,GAO De - lபைடு நூலகம்1 ,ZHAO Quan - qing2
( 1. Institute of Petroleum Engineering,China University of Petroleum( Beijing) ,Beijing 100024 ,China; 2. PetroChina Information Technology Service Center,Beijing 100007 , China)
u ∫[ 珗
m 0
( l)
- Δ珗 u ( l ) ] dl
( 1)
珒 r m 表示根据测量数据得到的井眼位置矢量; Δ珒 r 表示由测量误差得到的位置误差矢量; 珗 u m ( l ) 表示测 式中, u ( l ) 表示测量误差矢量, 是由陀螺仪初始参照误差、 钻柱磁化误差、 陀螺仪框架误 量的井眼方向矢量; Δ珗 差、 井斜测量精度误差、 深度测量误差、 不同轴误差等共同造成的. 计算公式可以表示为: u( l) = Δ珗 u j ( l ) = ∑ Δ f j ·w j ( l )·珒 v i ( l) Δ珗 ∑ j j ( 2)