实验一mini2440裸板驱动开发环境搭建.
mini2440裸板烧写u-boot
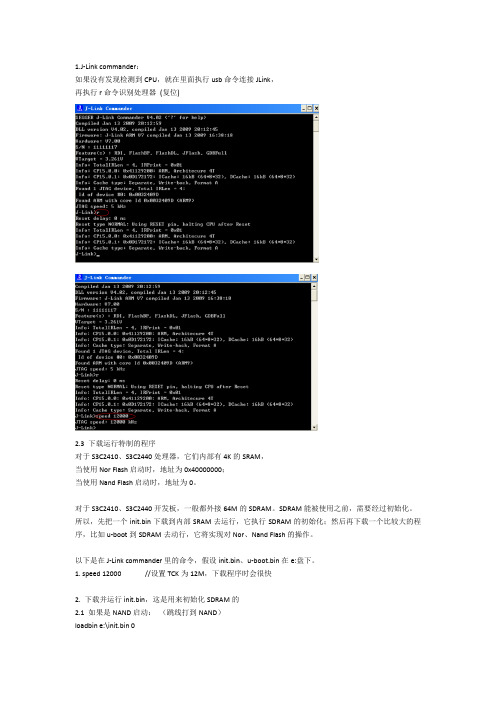
1.J-Link commander:如果没有发现检测到CPU,就在里面执行usb命令连接JLink,再执行r命令识别处理器(复位)2.3 下载运行特制的程序对于S3C2410、S3C2440处理器,它们内部有4K的SRAM,当使用Nor Flash启动时,地址为0x40000000;当使用Nand Flash启动时,地址为0。
对于S3C2410、S3C2440开发板,一般都外接64M的SDRAM。
SDRAM能被使用之前,需要经过初始化。
所以,先把一个init.bin下载到内部SRAM去运行,它执行SDRAM的初始化;然后再下载一个比较大的程序,比如u-boot到SDRAM去动行,它将实现对Nor、Nand Flash的操作。
以下是在J-Link commander里的命令,假设init.bin、u-boot.bin在e:盘下。
1. speed 12000 //设置TCK为12M,下载程序时会很快2. 下载并运行init.bin,这是用来初始化SDRAM的2.1 如果是NAND启动:(跳线打到NAND)loadbin e:\init.bin 0setpc 0g2.2 如果是Nor启动:(跳线打到NOR)loadbin e:\init.bin 0x40000000setpc 0x40000000g3. 下载特制的uboot:hloadbin e:\u-boot.bin 0x33f80000 链接地址setpc 0x33f80000g同理可以通过J-link下载其他程序文件:hloadbinyour_file.bin 0x30000000g这时,你的文件已经被下载到SDRAM 0x30000000去了。
5.使用u-boot烧写Flash(1).通过u-boot烧写到Nor Flash:在u-boot里执行:protect off all // 解锁erase 0 2ffff // 擦除从0地址开始的大小为0x30000的NOR Flash扇区(大小为可擦除块的整数倍,可以运行flash info命令查看)cp.b 0x30000000 0 30000 // 把前面下载到0x30000000的程序烧写到NOR去(2).通过u-boot烧写到Nand Flash:在u-boot里执行:nand erase 0 30000 // 擦除从0地址开始的大小为0x30000的Nnad Flash扇区nand write.jffs2 30000000 0 30000 // 把前面下载到0x30000000的程序烧写到Nand去注意,上面用的2ffff、30000等数字是192K,如果你的程序比较小,请自行设置。
使用QEMU建立Mini2440的模拟环境
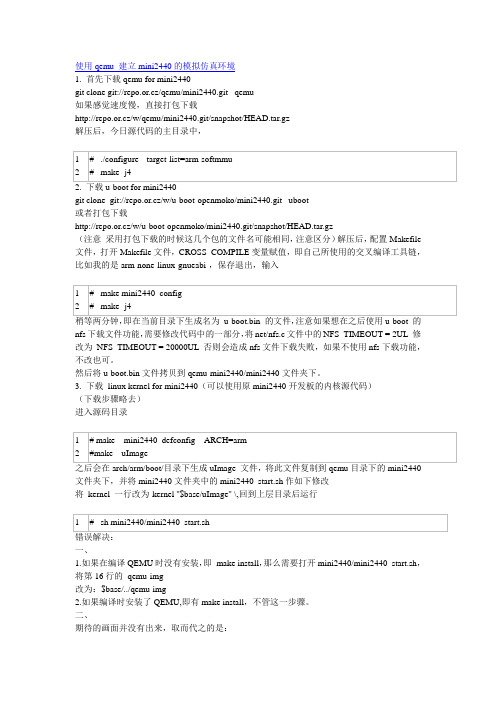
使用qemu 建立mini2440的模拟仿真环境1. 首先下载qemu for mini2440git clone git://repo.or.cz/qemu/mini2440.git qemu如果感觉速度慢,直接打包下载http://repo.or.cz/w/qemu/mini2440.git/snapshot/HEAD.tar.gz解压后,今日源代码的主目录中,git clone git://repo.or.cz/w/u-boot-openmoko/mini2440.git uboot或者打包下载http://repo.or.cz/w/u-boot-openmoko/mini2440.git/snapshot/HEAD.tar.gz(注意采用打包下载的时候这几个包的文件名可能相同,注意区分)解压后,配置Makefile 文件,打开Makefile文件,CROSS_COMPILE变量赋值,即自己所使用的交叉编译工具链,比如我的是arm-none-linux-gnueabi-,保存退出,输入nfs下载文件功能,需要修改代码中的一部分,将net/nfs.c文件中的NFS_TIMEOUT = 2UL 修改为NFS_TIMEOUT = 20000UL 否则会造成nfs文件下载失败,如果不使用nfs下载功能,不改也可。
然后将u-boot.bin文件拷贝到qemu-mini2440/mini2440文件夹下。
3. 下载linux kernel for mini2440(可以使用原mini2440开发板的内核源代码)(下载步骤略去)进入源码目录文件夹下,并将mini2440文件夹中的mini2440_start.sh作如下修改将kernel 一行改为-kernel "$base/uImage" \,回到上层目录后运行一、1.如果在编译QEMU时没有安装,即make install,那么需要打开mini2440/mini2440_start.sh,将第16行的qemu-img改为:$base/../qemu-img2.如果编译时安装了QEMU,即有make install,不管这一步骤。
构建MINI2440开发板 Ubuntu linux常见问题

构建MINI2440开发板Ubuntu开发环境-串口配置及使用2012-06-14 10:52:15来源: 作者: 【大中小】浏览:2次评论:0条做嵌入式开发,调试开发板最常使用的工具就是串口和网口,本文主要介绍在Ubuntu系统如何安装和设置串口软件(minicom和kermit)连接MINI2440开发板。
本文假设你已经在电脑上安装了Ubuntu系统。
对于现今大多数的笔记本而言,主板上一般都没有配置接口。
我们可以在网上购买到USB口转串口接口,网上有很多种类型的USB转接口,可以根据价格选择一个合适的就行。
这里使用的是基于PL2303芯片的USB 转接口。
1. 连接MINI2440开发板将USB串口转接器插上开发板和电脑后,在终端上敲dmesg命令,可以查看转接口已经被PC识别,如下图所示:从上图中我们可以看到我们所连接的串口设备是ttyUSB0,可以通过命令ls -l /dev/ttyUSB*来查看相关的信息。
至此,我们已经顺利的将串口连接到Ubuntu系统上了。
这里顺便提起一下,我在Windows下使用USB 转串口时,要先从网上下载一个安装PL-2302 USB Serial Driver,安装该驱动以后,才可以正常使用,而Linux 内核中已经支持PL2303芯片,所以不需要自行安装。
下面就会介绍minicom和kermit的使用。
2. minicom安装及设置Ubuntu系统中默认是没有安装minicom软件,所以我们首先自己需要安装,可以使用apt-get 命令来安装,如下图所示:安装完成以后,我们运行minicom -s命令进行一些初始配置,如下截图:参数的设置如下图所示,这里需要注意的一点是一定要把Hardware Flow Control也设置成None,我开始时就是因为没有设置这一项导致串口一直连不上去。
最后Save setup as dfl并退出,再次输入minicom命令,可以看到已经成功的连到了MINI2440开发板,如下图所示。
MINI2440

郑州轻工业学院校外实习报告实习名称:MiNI2440移植Uboot姓名:冯相楠院(系):计算机通信与工程学院专业班级:嵌入式软件14-2学号:541413430208指导教师:韩雪琴主要实习单位:郑州轻工业学院成绩:时间:2016年6月10日至2016年6月17日一、实习目的MiNI2440移植Uboot。
二、实习内容1、任务与要求1.移植uboot到mini2440,使其可以在nor flash中运行2.支持DM9000网卡3.支持nor flash读写主机:VMWare--redhat 5开发板:Mini2440--256MB Nand编译器:arm-linux-gcc-4.3.2.tgzu-boot:u-boot-2008.10.tar.bz22、设计思路1.选择移植参考开发板1.1 首先选择MCU相同的开发板,在uboot-2008.10中不支持MCU为s3c2440芯片的开发板1.2没有找到MCU相同的参考开发板,选择CPU相同的参考开发板,s3c2440的cpu为arm920T,smdk2410的cpu也是arm920T,选择smdk2410作为参考开发板。
2.在顶层makefile中为开发板添加新的配置选项(红色部分为添加代码,下同)smdk2410_config : unconfig@$(MKCONFIG) $(@:_config=) arm arm920t smdk2410 NULL s3c24x0mini2440_config : unconfig@$(MKCONFIG) $(@:_config=) arm arm920t mini2440 NULL s3c24x0注释:增加配置选项,使make mini2440_config得以进行,为make提供编译环境和设置编译选择路径;unconfig执行@rm -f $(obj)include/config.h$(obj)include/config.mk \$(obj)board/*/config.tmp $(obj)board/*/*/config.tmp \$(obj)include/autoconf.mk$(obj)include/autoconf.mk.dep操作,该操作删除原有的配置;@$(MKCONFIG) $(@:_config=) arm arm920t mini2440 NULL s3c24x0执行根目录下的mkconfig脚本,后面几个为传入该脚本的参数,其中$(@:_config=) 的值为mini2440,mkconfig脚本根据传入的参数对mini2440编译环境进行配置.3.修改cpu/arm920t/start.s3.1修改编译条件使其支持s3c2440136 /*added by snowboyyzx mini2440*/137 #if defined(CONFIG_S3C2400) ||defined(CONFIG_S3C2410) || defined(CONFIG_S3C2440)138 /* turn off the watchdog */3.2添加寄存器的定义151 /*added by yzx for mini2440,register define base on the table of s3c2440 datesheet*/152 #define CLK_CTL_BASE 0x4c000000 //基地址153 #define MDIV_405 0x7f << 12154 #define PSDIV_405 0x21155 #define UPLL_MDIV_48 0x38 << 12156 #define UPLL_PSDIV_48 0x22157 #define MDIV_200 0xa1 << 12158 #define PSDIV_200 0x31上述定义是根据芯片手册来设置的MDIV相应的数据之所以要左移12位是因为它在对应的寄存器的12-19位,将pdiv和sdiv放在一起用16进制表示,因为pdiv正好从第四位开始取值。
mini2440底层驱动源程序
#include "2440addr.h"#include "2440lib.h"#include "2440opt.h"#include <stdio.h>#include <stdarg.h>#include <string.h>static int delayLoopCount;void Delay(int time){int i,adjust=0;if(time == 0){time = 200;adjust = 1;delayLoopCount = 400;rWTCON = ((PCLK/1000000-1)<<8)|(2<<3);rWTDAT = 0xffff;rWTCNT = 0xffff;rWTCON = ((PCLK/1000000-1)<<8)|(2<<3)|(1<<5);}for(;time>0;time--)for(i=0;i<delayLoopCount;i++);if(adjust == 1){rWTCON = ((PCLK/1000000-1)<<8)|(2<<3);i = 0xffff - rWTCNT;delayLoopCount = 8000000/(i*64);}}void ChangeMPllValue(int mdiv, int pdiv, int sdiv){rMPLLCON &= 0x0;rMPLLCON = (mdiv << 12) | (pdiv << 4) | sdiv;}void ChangeClkDivn(int fclk2hclk, int hclk2pclk){int hdivn, pdivn;switch(fclk2hclk){case 1: hdivn=0; break;case 2: hdivn=1; break;case 3: hdivn=3; rCAMDIVN &= ~(1<<8); break;case 4: hdivn=2; rCAMDIVN &= ~(1<<9); break;case 6: hdivn=3; rCAMDIVN |= (1<<8); break;case 8: hdivn=2; rCAMDIVN |= (1<<9); break;default: hdivn=2; rCAMDIVN &= ~(1<<9);}switch(hclk2pclk){case 1: pdivn=0; break;case 2: pdivn=1; break;default: pdivn=1;}//rCLKDIVN &= ~(0x7);rCLKDIVN = (hdivn<<1) | pdivn;}void InitPort(void){rGPACON = 0x7fffff;rGPBCON = 0x044555;rGPBUP = 0x7ff;rGPCCON = 0xaaaaaaaa;rGPCUP = 0xffff;rGPDCON = 0xaaaaaaaa;rGPDUP = 0xffff;rGPECON = 0xaaaaa800;rGPEUP = 0x1fff;rGPFCON = 0x55aa;rGPFUP = 0xff;rGPGCON = 0xff95ffba;rGPGUP = 0xffff;rGPHCON = 0x2afaaa; //配置UART相应的多功能管脚为功能性引脚nCTS0nRTS0 TXD RXDrGPHUP = 0x7ff;rGPJCON = 0x02aaaaaa;rGPJUP = 0x1fff;rEXTINT0 = 0x22222222; //EINT[0-7]rEXTINT1 = 0x22222222; //EINT[8-15]rEXTINT2 = 0x22222222; //EINT[16-23]}void InitUart(int uartclk, int buad){int i;if(uartclk == 0)uartclk = UART_CLK;//UART0//UFCON: uart fifo control register() Status Query: UFSTATnrUFCON0 = 0x0;//UMCON: UART channel MODEM control register Status Query: UMSTAT rUMCON0 = 0x0;//set transmit type ULCONnrULCON0 = 0x3;//set uart clock source and interrupt typerUCON0 = 0x245;//set buad rate UBRDIVnrUBRDIV0 = ((int)(UART_CLK/16./buad+0.5)-1);//UART1rUFCON1 = 0x0;rUMCON1 = 0x0;rULCON1 = 0x3;rUCON1 = 0x245;rUBRDIV1 = ((int)(UART_CLK/16./buad+0.5)-1);//UART2rUFCON2 = 0x0;rULCON2 = 0x3;rUCON2 = 0x245;rUBRDIV2 = ((int)(UART_CLK/16./buad+0.5)-1);for(i=100; i>0; i--);}static int whichUART=0;void SelectUart(int uart_no){whichUART = uart_no;}void PrintOnUart(char *fmt, ...){va_list ap;char string[256];memset(string, 0, sizeof(string)/sizeof(string[0]));va_start(ap, fmt);vsprintf(string, fmt, ap);Uart_SendString(string);va_end(ap);}void Uart_SendString(char * pStr){while(*pStr)Uart_SendByte(*pStr++);}void Uart_SendByte(U8 data){switch(whichUART){case 0:if(data == '\n'){while(!(rUTRSTA T0 & 0x2));Delay(10);WrUTXH0('\r');}while(!(rUTRSTA T0 & 0x2));Delay(10);WrUTXH0(data);break;case 1:if(data == '\n'){while(!(rUTRSTA T1 & 0x2));Delay(10);rUTXH1 = '\r';}while(!(rUTRSTA T1 & 0x2));Delay(10);rUTXH1 = data;break;case 2:if(data == '\n'){while(!(rUTRSTA T2 & 0x2));Delay(10);rUTXH2 = '\r';}while(!(rUTRSTA T2 & 0x2));Delay(10);rUTXH2 = data;break;default:if(data == '\n'){while(!(rUTRSTA T0 & 0x2));Delay(10);rUTXH0 = '\r';}while(!(rUTRSTA T0 & 0x2));Delay(10);rUTXH0 = data;}}U8 Uart_GetChar(void){switch(whichUART){case 0:while(!(rUTRSTA T0 & 0x1));return RdURXH0();case 1:while(!(rUTRSTA T1 & 0x1));return rURXH1;case 2:while(!(rUTRSTA T2 & 0x1));return rURXH2;default:while(!(rUTRSTA T0 & 0x1));return RdURXH0();}}void Uart_GetLine(char * LineBuf){U8 ch;while(1){if((ch=Uart_GetChar()) != '\r'){*LineBuf++ = ch;}else{*LineBuf = '\0';break;}PrintOnUart("%c",ch);}}。
飞凌2440开发板—JLINK裸机仿真实验手册
ADS JLINK裸机仿真实验手册
准备实验
一、硬件
1.Fl2440或者TE2440开发板一套
2.JLINK仿真器一个
二、软件
1.裸机实验代码,init.axf文件
2.ADS1.2开发环境
3.JLINK驱动
实验步骤
一、将JLINK与开发板和PC机连接到一起,这时可以看到JLINK上的电源指示灯亮了
二、打开AXD软件
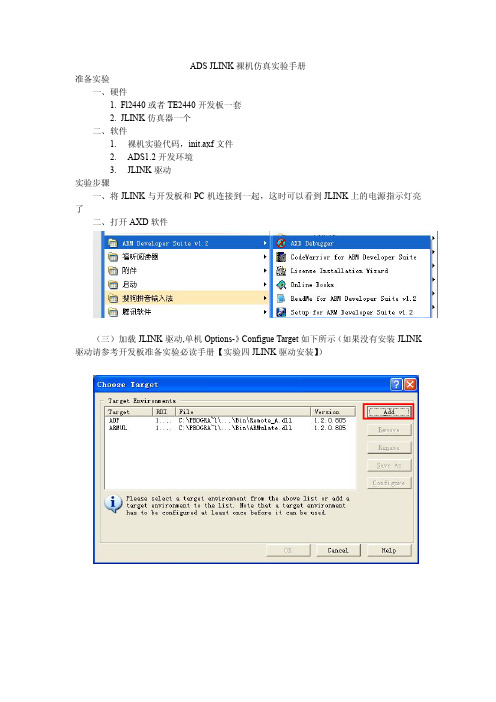
(三)加载JLINK驱动,单机Options-》Configue Target如下所示(如果没有安装JLINK 驱动请参考开发板准备实验必读手册【实验四JLINK驱动安装】)
(四)点击“OK”后会有如下画面显示:
五、给开发板上电,按下面操作进行
六、点击Load Image后会有如下界面,选择2440init.axf文件,文件路径为:X:\FL2440\Bootloader\目标文件\2440init.axf
找到2440init.s文件,打开
七、点击“运行”让软件跑一会儿,然后点击“停止”,如下图所示
八、按下图所示操作
九、实验源码路径为X:\实验指导&demo\ADS基础实验\实验源码\1.3-led
向上查找init.s源文件,添加
点击“运行”,程序开始运行,如下所示,然后,点击“停止”
点击“运行”,出现如下界面,观察开发板的led灯,第一个已经点亮,稍微多等一会第二个灯也会点亮,这样流水灯的程序演示完毕,你可以根据自己的需求任意改动程序,开发属于自己的led灯。
一起学mini2440裸机开发(十)--mini2440外部中断实验

一起学mini2440裸机开发(十)--mini2440外部中断实验我今天一整天都在试着将TQ2440的那种处理中断的方法(即安装中断向量表)移植到MDK 中的mini2440,但是一直没成功,这种方法一直没成功,后来又想,还是先从最简单的开始吧,就是不利用中断向量表,直接像利用51单片机那样的中断一样使用它,但是也没成功。
考虑到程序跑飞的可能性,将程序利用MDK中的Download功能下载到了Nor Flash 中去,竟然行了,想了想原因,明白是怎么回事了。
我原来是利用jlink调试的方法,这种调试方式是直接将程序放到了SDRAM的0x3000 0000处,如果发生中断后,比如发生了普通中断IRQ,那么PC指针被强制设为0x0000 0018,而我的程序是放在了0x3000 0000处,在地址0x0000 0018处有什么我也不知道,这样子程序就跑飞了。
下面还是简单说一下我的外部中断实验,结合具体的实验,分析中断的响应过程,以及中断服务函数的编写。
实验功能本实验实现的功能:mini2440开发板上有6个按键,将其中的前4个按键设为外部中断方式,当按下K1时,LED1亮;当按下K2时,LED2亮;当按下K3时,LED3亮;当按下K4时,LED4亮。
硬件电路分析:我的256M的mini2440板子上有4个LED,其接口电路如图1所示,当GPIO口输出为低电平时,相对应的LED灯亮;输出高电平时,LED灯灭。
按键接口电路如图2所示,当按键没有按下时,GPGx引脚为高电平;当按键按下时,引脚电平变为低电平。
程序分析:外部中断工程的文件布局如图3所示。
该工程有三个模块组成:按键模块、LED模块和中断处理模块。
按键模块主要包含button.c 和button.h文件。
LED模块包含led.c和led.h文件。
中断处理模块主要包含interrupt.c、interrupt.h、isrservice.c和isrservice.h文件。
Mini 2440 LED、按键和蜂鸣器裸机测试程序(C语言)

Parameter : 无
Description : 按下按键 1(key1)将会点亮 led1,并且蜂鸣器将发出响声,按键 1-4 依次对应,按
下按键 5(key5)点亮所有的 led,按下按键 6(key6)关闭所有的 led
Return
:无
Argument : 无
Autor & date : Hyfeng
} }
但是对应蜂鸣器来说 1 代表发出声音,而 0 则代表不出声音。
在此程序中并没有使用到按键的中断,而是使用了一个死循环去实现的。并且这个程序
保护两个部分,一个是汇编程序编写的引导部分,因为这是一个裸机的程序,即没有操作系
统的程序,因此想要在板子上运行 C 程序必须进行相应的初始化的工作,这个就是汇编程序
**************************************************/
//将按键的状态设置为输入的状态
void key_init(void)
{
rGPGCON &= ~((3<<0)|(3<<6)|(3<<10)|(3<<12)|(3<<14)|(3<<22));}
/*************************************************
rGPBCON &= ~((3<<0)); rGPBCON |= (1<<0); }
/*************************************************
Function name: delay
Parameter : times
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验一mini2440裸板驱动开发环境搭建讲师:杨行【实验目的】1、了解minicom配置串口通信参数的过程,掌握利用minicom进行传输文件方法2、了解网络文件系统nfs的配置,掌握利用nfs进行文件的传输和异地运行目标板程序3、掌握tftp的使用方法【实验原理】一、安装编译器1. mkdir /usr/local/arm2. tar xjvf arm-linux-gcc-4.4.3.tar.bz2 –C /usr/local/arm3. vim /etc/profile+PATH=/usr/local/arm/4.4.3/bin:$PA TH4. source /etc/profile5. arm-linux-gcc -v注意:1 Ubuntu 14.04 64位系统无法运行32位可执行文件,需要安装一个32位兼容库lib32z12Ubuntu 12.04 64位系统安装ia32-libs3sudo apt-get install libstdc++64sudo apt-get install lib32stdc++6二、minicom的使用1. 安装:sudo apt-get install minicom2. 配置:minicom -s3. 使用:命令:ctrl a + q quitctrl a + w lineWrapctrl a + z help1、串口通信参数的设置确认USB转串口工具是否已经连接到电脑上,如果连接到电脑上,则:ls /dev/ttyUSB0如果已经确认了ttyUSB0已经存在,则:首先运行minicom,由于minicom是通过串口来工作的,所以要通过minicom程序来对串口通信参数进行设置。
启动minicom的设置窗口:在linux的终端中输入“minicom –s”,然后,按下回车键。
spring@spring-virtual-machine:~$ sudo minicom -s“-s”选项调出配置信息。
下面显示的就是配置的菜单。
有关串口通信选项的含义:"Filenames and paths":选择需要传输的文件和路径"File transfer protocols":选择传输文件的通信协议"Serial port setup":设置串口通信参数"Save setup as dfl":将设置好的各项参数保存为dfl"Save setup as":将设置好的各项参数保存为自定义的文件名"Exit":退出返回到minicom设置好后的终端"Exit from Minicom":从minicom命令中退出返回Linux终端将光标移到"Serial port setup",按回车键会弹出串口通信参数的配置菜单。
(1)、串口通信口的选择:(A - Serial Device)接"A"键把光标移动到Serial Device。
如果串口线连在PC机的串口1上,则把Serial device设置为/dev/ttyUSB0。
如果连在串口2上,则把Serial device设置为/dev/ttyUSB1,然后按下回车键。
(2)、串口参数的设置(E - Bps/Par/Bits)按"E"键来设置通信波特率、数据位、奇偶校验位和停止位。
可以通过按下不同的键来设置通信参数。
例如mini2440平台需要把波特率设为115200,数据位设为8,奇偶校验位设为无,停止位设为1。
可以分别通过按"E"、"V"、"L"、"W"键设置波特率、数据位、奇偶校验位和停止位。
设置完后按"Esc"返回。
(3)、数据流的控制选择(F - Hardware Flow Control、G - Software Flow Control)按"F"键可以完成硬件流控制切换,即完成"Yes"与"No"之间的切换。
按"G"键完成软件流控制切换,即完成"Yes"与"No"之间的切换。
下图显示的是串口配置好的后完整信息。
(4)、设置参数的保存与退出配置完成后,按下“Esc”键,将会出现下图的配置菜单。
选择“Save setup as dfl”按ENTER键来保存,当配置保存后,按下“Esc”键完成设置。
当minicom窗口出现后,将mini2440开发板的启动方式选择按键拨到nor flash重起mini2440将会看到启动信息。
如果没有出现启动信息,请检查mincom的设置和线缆连接是否有错。
2、利用串口通信文件传输在与目标板连接后,可以通过串口下传一些文件到目标板,具体操作步骤如下:(1)、在与目标正确连接后,进入[root@51board~],按下CTRL+A键后,再按Z键,系统调出minicom的命令选项菜单;其中Send files和Receive files两项负责文件数据的传输,所用命令使用热键进行激活。
如上传文件只需按S键。
(2)、当向目标板上传文件时,按S键,系统弹出串口通信协议选项,利用方向键选中zmodem 传输协议,按回车键,进入文件选择菜单。
(3)、文件传输文件选择菜单弹出后,利用空格键选中需要上传的文件,一次可以选择多个文件,选好需要传输的文件后按回车键,便可以进行文件数据传输。
当数据传输完毕,系统会弹出传输完毕提示菜单(如下图所示)。
三、安装tftp服务1. sudo apt-get install tftp tftpd xinetd2. sudo vim /etc/xinetd.d/tftpservice tftp{socket_type = dgramprotocol = udpwait = yesuser = rootserver = /usr/sbin/in.tftpdserver_args = -s /tftpbootdisable = noper_source = 11cps = 100 2 #每秒100连接入站,如果超过限制则等待2秒flags = IPv4}3. sudo mkdir /tftpboot4. sudo chmod 777 /tftpboot -R5. sudo /etc/init.d/xinetd restart6. sudo netstat -a | grep tftp说明:修改项server_args = -s <path> -c,其中<path>处可以改为你的tftp-server的根目录,参数-s指定chroot,-c 指定了可以创建文件。
四、安装NFS服务1. sudo apt-get install nfs-kernel-server2. sudo vim /etc/exports+/nfsroot *(rw,sync,no_root_squash)3. sudo /etc/init.d/portmap restart4. sudo /etc/init.d/nfs-kernel-server restart5. showmount -e网络文件系统nfs可以将PC机上的一部分文件系统作为目标机的资源,这样可以弥补目标机存储空间的不足。
在使用网络文件之时,应对网络文件配置进行一定的设置。
[root@51Board~]$ mount –t nfs 192.168.1.12:/mnt/nfs /mnt上述设置实现将主机上的/mnt/nfs目录挂载到目标机的/mnt目录下,并作为目标机文件系统的一部分。
这时,可以将需要传输的文件或需要运行的程序保存在主机的/mnt/nfs目录下,然后在目标机对主机/mnt/nfs上的文件进行运行或复制等相应的处理。
五、编译安装u-boot1. tar xvf bootloader.tar2. cd bootloader3. cd u-boot4. make distclean5. make mini2440_config6. make -j27. cp u-boot.bin ~/桌面8.使用mini2440提供的MiniTools 烧写到开发板中注:开发板的S2开关搬到nor处。
make clean仅仅是清除之前编译的可执行文件及配置文件。
而make distclean要清除所有生成的文件。
下载完成后,将S2开关拨到nand处,启动板子,出现如下信息:快速的按下任意键(建议按下回车键),使得进入u-boot模式中:六、使用putty工具实现远程桌面连接1、在ubuntu系统中安装ssh,可使用如下的命令进行安装:sudo apt-get install openssh-server2、为了保险起见,安装完成后重启一下ssh服务,命令如下:3、下载putty,运行,如下后图所示,输入IP地址即可,注意端口号不要改4、点击open,即可建立远程连接,运行后如下图所示6、输入用户名后回车,然后会提示输入密码,这时输入相应的密码就可以了注意:如果直接登录在登录时可能会出现中文乱码的情况,这时可以在登录前进行如下的设置,就不会出现乱码了这里我选择的是UTF-8是因为我的ubuntu系统是UTF-8编码格式的,大家可根据实际情况进行设置七、Ubuntu终端远程连接计算机(Linux)SSH是一个远程接入软件,可以让你想坐在计算机前面一样操作计算机。
SSH使用加密方式传输数据,是一种非常安全的工作方式。
步骤如下:前提:如果没有安装ssh的话请sudo apt-get install ssh1、在需要远程访问的计算机的“新立得”里面安装openssh-server。
这台计算机是远程计算机,你当前使用的计算机是本地计算机。
如果使用Ubuntu或者其他Linux版本,已经安装了连接到远程计算机的软件。
2、远程计算机软件安装完毕。
在本地计算机的终端里面输入:ssh username@address其中username是远程计算机的账户名称,address是远程计算机的IP地址或者域名。
平日你希望以root用户名登录192.168.0.99,可以使用:例如:ssh spring@192.168.0.99如果不知道远程计算机的IP地址,可以在远程计算机上面点击网络监视器,选择“连接信息”,查看IP地址信息。
3、首次连接,可能提示“the authenticity of the host can’t be established”。