期末考试过程控制计算题
过程控制试卷B答案和评分标准

答:直接数字控制系统(Direct Digital ControlQDC )它使用一台计算机代替工程控制中的模拟控制器,并不改变原有的生产 过程,计算机首先通过 AI 和DI 接口采集数据,把检测仪表送来 的反应各种工艺参数和过程状态的标准模拟信号、开关信号转换1、 “被控变量”的英文全称是 Con trolled Variable,CV ____2、 “误差”的英文全称是 error3、 “伺服控制”的英文全称是 Servo Control4、 “开关量控制”的英文全称是 Switch Control _____5、 “连续量控制”的英文全称是 Continuous Control _____ 6 “连续时间控制”的英文全称是 Continuous-Time Control 7、 “离散时间控制”的英文全称是 Discrete-Time Control 8、 “常规控制”的英文全称是Conventional Control _______9、 “先进控制” 的英文全称是 Advaneed Process Control ,APC 10、“ PID ” 的英文全称是 Propotional Integral Derivative ______ 11、S7-300 PLC 中 OB35的 “OB 的英文全称是 Organization Block数据块“ DB 的英文全称是 Data Block在本次的过程控制课程设计中:12、 你所在设计组使用的电加热丝功率是 2.5KW(4.5KW),采用铜(铂)热 电阻测温,它的分度号是 Cu50(Pt100),AI-818仪表中分度号设置数据是 为数字信号及时送往计算机主机;主机按照一定的控制规律 进行计算,发出数字化的控制信息;最后通过 AO 和DO 接口把 主机输出的数字信号转换为适应各种执行器的控制信号直接控制 生产过程。
特点:计算灵活,不仅能实现典型的 PID 控制规律,还可以分时 处理多个控制回路,能方便的对传统的PID 算法进行改进或实现其他的复杂控制算法,但价格昂贵,而且计算机速度难以满足快 速过程实时控制的要求。
过程控制期末考试题
过程控制期末考试题一、选择题(共40题,每题2分,共80分)请在每题后的括号内选择正确答案,并将其序号写在答题纸上。
1. 过程控制的目标是()。
A. 使过程控制系统更稳定B. 提高生产效率C. 提高产品质量D. 所有选项都正确2. 下列哪项不是过程控制的主要步骤()。
A. 建立数学模型B. 采集过程数据C. 制定控制策略D. 评估控制效果3. 过程控制中的反馈控制是指()。
A. 控制器根据误差信号对过程进行调节B. 控制器根据过程输出信号进行调节C. 控制器通过传感器采集过程数据进行调节D. 控制器根据控制策略进行调节4. 在过程控制中,传感器的作用是()。
A. 实时监测过程变量B. 收集过程数据C. 发送控制信号D. 都是5. PID控制器中的D表示()。
A. 比例项B. 积分项C. 微分项D. 都不是6. 过程控制中的SOPC代表()。
A. Stock-Other-Production-ControlB. Structure-Operate-Produce-ControlC. Structured-Operated-Process-ControlD. Structure-Operate-Produce-Calculate7. 过程控制中,哪种控制策略常用于对连续变量进行控制()。
A. 分段控制B. 比例控制C. 二值控制D. 都可以8. 在过程控制中,哪种控制策略常用于对离散变量进行控制()。
A. 分段控制B. 比例控制C. 二值控制D. 都可以9. 控制系统稳定性是指系统()。
A. 对外界干扰的抵抗能力B. 对控制命令的响应速度C. 对过程参数的适应能力D. 传感器的精度和灵敏度10. 过程控制中的开环控制指的是()。
A. 控制器不考虑过程输出信号而进行调节B. 控制器根据过程输出信号进行调节C. 控制器根据误差信号对过程进行调节D. 控制器根据控制策略进行调节(以下题目略)二、简答题(共5题,每题10分,共50分)请简述下列问题的答案,并将其写在答题纸上。
过程控制知识考试题库

过程控制知识考试题库一、选择题1. 过程控制的基本原理是什么?A. 开环控制B. 闭环控制C. 线性控制D. 非线性控制2. 以下哪个不是过程控制系统的组成部分?A. 传感器B. 执行器C. 显示器D. 电源3. PID控制器中的I代表什么?A. 比例(Proportional)B. 积分(Integral)C. 微分(Derivative)D. 增益(Gain)4. 过程控制中,什么是反馈?A. 系统输出的信号B. 系统输入的信号C. 系统内部的信号D. 系统外部的信号5. 以下哪个是过程控制系统的典型应用?A. 温度控制B. 压力控制C. 流量控制D. 所有以上选项二、填空题6. 过程控制中,______ 用于测量过程变量。
7. 过程控制系统的目的是维持过程变量在______ 附近。
8. PID控制器的输出信号是比例项、积分项和______ 的组合。
9. 在过程控制中,______ 可以用于消除系统的稳态误差。
10. 过程控制系统的稳定性可以通过______ 判据进行判断。
三、简答题11. 简述开环控制系统与闭环控制系统的区别。
12. 解释什么是过程控制中的超调量,并说明它对系统性能的影响。
13. 描述PID控制器的工作原理,并解释各参数如何影响控制效果。
14. 什么是控制回路的死区?它在实际应用中的作用是什么?15. 举例说明过程控制系统在工业生产中的应用。
四、计算题16. 假设有一个简单的PID控制系统,其比例增益Kp=2,积分时间Ti=1秒,微分时间Td=0.5秒。
如果设定值为10,实际值为8,初始时刻t=0,求在t=1秒时系统的输出值。
五、案例分析题17. 某化工厂需要控制反应器内的温度,以保证化学反应的顺利进行。
请根据以下信息设计一个合适的过程控制系统:- 温度测量范围:100°C至200°C- 允许的最大超调量:5%- 控制精度:±1°C- 反应器热容量:5000 J/°C- 环境温度:25°C- 反应器加热器功率:10 kW六、论述题18. 论述现代过程控制系统中数字控制技术的优势及其在工业自动化中的应用。
中国石油大学《过程控制工程》复习题及答案

《过程控制工程》期末复习题一、(每空1分)填空题:1、对于一个比例积分微分(PID)控制器来说,积分时间越小则积分作用越;微分时间越小,则微分作用越。
2、三种常用的均匀控制方案包括、、。
3、常规PID控制器中的P指作用、I指作用、 D指作用。
4、用于输送流体和提高流体压头的机械设备统称为流体输送设备,其中输送液体并提高其压头的机械称为,而输送气体并提高其压头的机械称为。
5、工程上常用的几种整定PID控制器参数的方法是、、、。
6、请举出我们曾经学过的三种复杂控制系统:、、。
7、比值系统控制系统从结构上可分为四种,分别是开环比值控制系统、、、四种。
8、调节阀的固有流量特性主要有、、、四种。
9、比值系统控制系统从结构上可分为四种,分别是开环比值控制系统、、、四种。
10、单回路控制系统一般由、、、四个环节组成11、常见的传热设备有、、等。
12、要消除系统的稳态误差,通常选用控制器。
13、用来评价控制系统性能优劣的阶跃响应曲线性能指标分别是、、、振荡频率和回复时间等。
14、工程上进行PID控制器参数整定时,随动系统的控制品质要求衰减比为,定值系统中控制品质要求衰减比为。
15、常见的传热设备有、、等。
16、精馏装置一般由、、、等设备组成。
精馏塔产品质量指标选择有直接产品质量指标和两类。
二、选择题(10分,每小题2分)1、成分、温度调节系统的调节规律,通常选用()。
A. PIB. PDC. PID2、自动控制系统中控制器正、反作用的确定是根据()。
A.实现闭环回路的正反馈。
B.实现闭环回路的负反馈。
C.系统放大倍数恰到好处D.生产的安全性。
3、单纯的前馈调节是一种能对()进行补偿的调节系统。
A.测量与给定之间的偏差 B.被调量的变化 C.干扰量的变化4、分程控制系统常要加装()来达到分程的目的。
A.调节器 B.变送器 C.阀门定位器5、在某一分离异丁烷与正丁烷的精馏塔中,微小的压力波动也会影响温度的变化,同时压力波动引起的各板上温度变化的方向是一致的,此时应选择()作为间接质量指标进行控制。
过程控制计算题
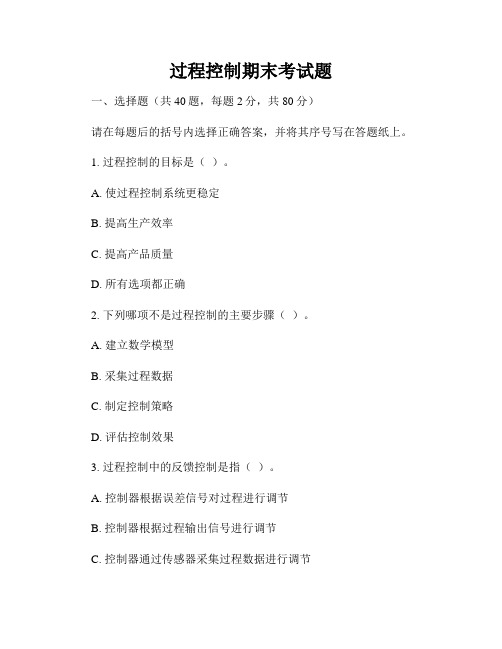
230 温度控制系统过渡过程曲05年三、计算题(共30分)1、(6分)某换热器的温度调节系统在单位阶跃干扰作用下的过渡过程曲线如图所示。
试分别求出最大偏差、余差、衰减比、振荡周期和回复时间(给定值200℃)。
解 最大偏差:A=230-200=30℃ 余差C=205-200=5℃由图上可以看出,第一个波峰值B=230-205=25,第二个波峰值B ’=230-205=5,故衰减比应为B ∶B ’=25∶5=5∶1。
振荡周期为同向两波峰之间的时间间隔,故周期T=20-5=15(min )过渡时间与规定的被控变量限制范围大小有关,假定被控变量进入额定值的±2%,就可以认为过渡过程已经结束,那么限制范围为200×(±2%)=±4℃,这时,可在新稳态值(205℃)两侧以宽度为±4℃画一区域,图9-6中以画有阴影线区域表示,只要被控变量进入这一区域且不再越出,过渡过程就可以认为已经结束。
因此,从图上可以看出,过渡时间为22min 。
2、(6分)某一燃烧煤气的加热炉,采用DDZ -III 型仪表组成温度单回路控制系统,温度测量范围0~1000℃,由温度变送器转换为4~20mADC 输出。
记录仪刻度范围0~1000℃。
当炉温稳定在800℃时,控制器输出为12mA 。
此时手动改变设定值,突然使控制器输出变为16mA ,温度记录从800℃逐渐上升并稳定在860℃。
从响应曲线上测得τ=3min ,T P =8min 。
如果采用P ,PI ,PID 控制器,采用响应曲线法求解各整定参数值。
条件1:条件2:响应曲线法整定参数[解] 对照图12-12响应曲线,结合本控制系统求出:Δm =16-12=4mA ,m max -m min =20-4=16mA Δx =x (∞)-x (0)=860-800=60℃, x max -x min =1000-0=1000℃代入式(12-2)得由表12-9中PID 控制器参数计算式,算得:P(﹪)=837.47%8324.083=⨯=τP P T K T I =2τ=2×3=6min T D =0.5τ=0.5×3=1.5min3、(9分)下图为水箱液位控制对象,其液体流入量为Q 1,改变调节阀1的开度μ1,可以改变Q 1的大小。
过程控制复习题(2)

过程控制复习题(2)⼀、填空题:1、简单控制系统由(控制器)、(执⾏机构)、(被控对象)和(检测变送仪表)四个环节组成。
2、对象数学模型是指对象的(输⼊输出)特性,是对象在各输⼊量(控制量和检测变送量)作⽤下,其相应输出量(被控量)变化函数关系的数学表达式。
3、获取对象数学模型的⽅法参⽅法有:(机理法)和(测试法)。
4、⽓动执⾏器由(调节)机构和(执⾏)机构两部分组成,常⽤的辅助装置有(阀门)定位器和⼿轮机构。
5、流通能⼒C的定义是:调节阀全开,阀前后压差为(0.1Mp),流体重度为(1g/m3),每(⼩时)所通过的流体(系)数。
6、被调介质流过阀门的(相对)流量与阀门(相对)⾏程之间的关系称为调节阀的流量特性;若阀前后压差保持不变时,上述关系称为(理想流量)特性,实际使⽤中,阀门前后的压差总是变化的,此时上述关系为(⼯作流量)特性。
7、动态前馈控制的设计思想是通过选择适当的(前馈)控制器,使⼲扰信号经过(前馈)控制器致被控量通道的动态特性完全复制对象(⼲扰)通道的动态特性,并使它们符号(相反)(正、反),从⽽实现对⼲扰信号进⾏完全补偿的⽬标。
8、⾃动调节系统常⽤参数整定⽅法(动态特性参数法),(稳定边界法),(衰减曲线法),(经验法)。
9、调节系统中调节器正、反作⽤的确定依据是:(保证控制系统成为负反馈)。
4、模糊控制器的设计(不依赖)被控对象的精确数学模型。
⼆、单项选择题:1、调节系统的稳定性是对调节系统最基本的要求,稳定调节过程的衰减率ζ应是(C.0<ζ<1)。
2、线性调节系统的稳定性(稳定或不稳定)取决于(C.⼲扰作⽤的形式、强弱和系统本⾝的结构、参数。
)3、单纯的前馈调节是⼀种能对(C.⼲扰量的变化)进⾏补偿的调节系统。
4、均匀控制系统的任务是(A.使前后设备在物料供求上相互均匀、协调。
)5、定值调节系统是环调节,前馈系统是环调节。
(B.闭,开)6、在选择性调节系统中防积分饱和⼀般采⽤(B.外反馈法)⽅法。
期末考试过程控制计算题
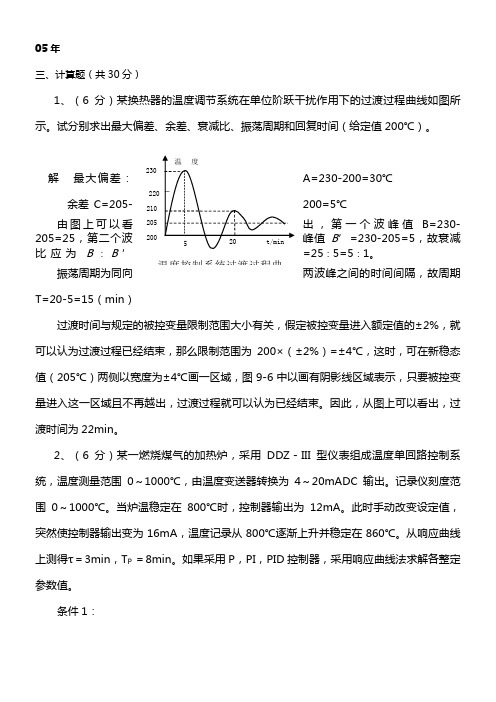
解.$ = 55^100 100%0.44%计算及问答题1 .某换热器温度控制系统(设定值为100C),在阶跃扰动作用下的过渡过程曲线如图所示。
分别求出衰减比、最大偏差、余差、过渡时间和振荡周期(按土3%稳态值来确定过渡时间)。
温度c余差 C= y ( 8)— y( 0 ) =105 — 100=5过渡时间ts=27min,(计算稳态值的土 3%,即102或108,用尺子量后估算出时间) 振荡周期,时间作衰减振荡,所以振荡周期 T=20 — 8=12min,(两个波峰的时间差)2.已知某被控过程的数学模型为U (s) KE(s) Ts 1应用前向差分法,求关于 u(k)和e(k)的差分方程。
参考计算控制课本 p129解:U(s)?(Ts 1) K ?E(s)1B21(130 105)解:衰减比 W =1B11(110 105)0.8最大偏差A,即超调量b y(二:)100% ^5100% 23.8%Ts?U(s) U(s) K?E(s)du(t)1dtu(t) Ke(t)设采样周期为 du(t)TS ,代入 dtu(k 1) u(k)T ST S(u(k 1) u(k)) u(k) Ke(k)u(k) hw u(k 1)T S T S TKe(k)3. 一台仪表的测温范围为 100〜550C,绝对误差的最大值为 2C,求这台仪表的相对误差。
: (1) 求出仪表最大绝对误差值; (2) 确定仪表的允许误差及精确度等级; (3)仪表经过一段时间使用后,重新校验时,仪表最大绝对误差为土 8C,问该仪表是否 还符合出厂时的精确度等级。
解:(1)最大绝对误差值为 6。
(2)仪表精度八矗100%伐%佰%所以允许误差为土 1.5%,仪表精度等级为1.5级。
(3)使用一段时间后的精度为a 所以不符合出厂时的精确度等级。
5. 如下图所示液位控制系统中, 被控变量、(2)操纵变量、(3)主要扰动、(4)输入信号、此题需特别注意! !解:被控过程物料的输入量时水的 流量Q1,输出量是水的流量 Q 2; (1) 被控变量是液位 H;(2) 操纵变量是流量 Q2;(开关在这里,控制排水量,而不是入水 量) (3) 主要扰动是流量Q1; 6.图所示液位过程的输入量为 q 〔,流出量为q 2、q 3,液位h 为被控参数,C 为容量系数,设R 〔、R 2、R 3为线性液阻,求: (1) 列出液位过程的微分方程组; (2) 画出液位过程的框图; (3)求液位过程的传递函数 W 0(s)=H (s)/Q 1(s)100% 1.6% 1.5%被控过程物料的输入量和输出量是什么?控制系统的 (1)(5)输出信号各是什么?⑶做拉氏变换7.用动态特性参数法整定单回路控制系统调节器参数时,测得过程的T= 8s, T=80s,自平衡率p= 1,当调节器分别采用 P 、PI 、PID 控制规律时,求0.75,调节器整定的参数 解:由于T 10 0.1 ,故应用表中〒0.2时的公式计算。
过程控制期末考试

期末复习题1.对象(过程)的数学模型建立方法主要有机理演绎法和试验辨识法两种.2.控制系统的性能指标有单项指标和综合指标两种。
3.热电偶主要用于测较高温度,而热电阻用于测中低温度,热电阻与测量桥路连接时,往往采用三线制线圈的连接方式。
4.用于测流量的节流装置之一是孔板,利用流体流经此节流设置时产生的压力差而实现流量测量,它与流速成定量的关系。
5.被测介质为导电液体时,电容式物控计的内电阻(金属棒)要用绝缘物覆盖.6.调节阀的理想测量特性有直线、对数和快开三种。
7.在工程上,简单控制系统的参数整定方法有临界比例度法、衰减曲线法和经验试凑法三种。
8.DDZ—III型仪表的供电电源为24V DC,DDZ—II型仪表的供电电源为220 V AC,DDZ—III型仪表的标准统一电信号为4~20 mA DC或1~5 V DC,而DDZ-II型的则是0~10 mA DC9.应变器或压力传感器是基于应变效应进行测量的,即将物理变量转换成电阻值.10.控制系统的单项性能指标有衰减比、超调量、残余偏差和调节时间.11.电动调节阀由调节器和执行机构两部分组成,它有正转和反转两种工作方式。
12.用于测流量的节流装置有孔板、喷嘴和文丘里管三种标准形式.13.温度变送器有三个品种,它们分别是:接触式变送器、非接触式温度变送器和智能式温度变送器。
14.基型控制器由量程单元和放大单元两大部分组成。
15.控制系统对偏差的定义是e =r(t)—y(t),而仪表对偏差的定义则是e = y(t)—r (t).16。
简单控制系统主要由控制器、执行器、被控对象和测量变送四个基本环节组成。
17.电——气阀门定位器具有电气转换、改善阀门性能双重作用。
18。
在确定系统的控制方案时,应使对象控制通道的放大系数增大,时间常数减小 ,纯滞后减小 ;对象干扰通道的放大系数减小,时间常数增大。
19.电动薄膜执行机构的正作用是指输入信号压力增加时,推杆上移,控制阀的正装是指阀杆下移时,阀门开度减小,所构成的执行器为型式气关.20.为了扩大控制阀的可调范围可采用分程控制系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
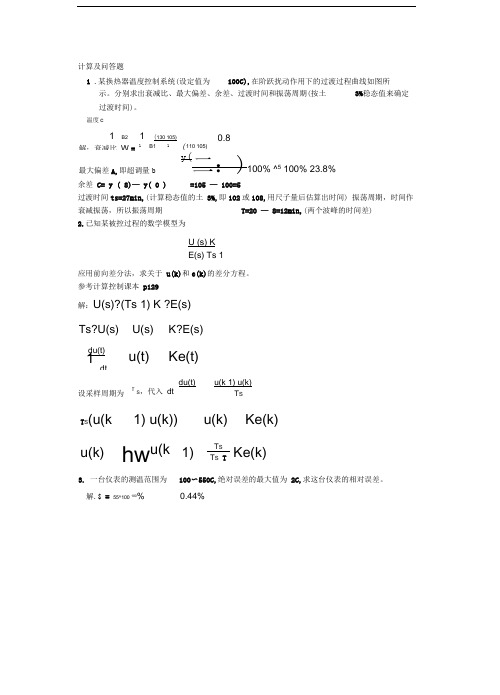
计算及问答题1.某换热器温度控制系统(设定值为100℃),在阶跃扰动作用下的过渡过程曲线如图所示。
分别求出衰减比、最大偏差、余差、过渡时间和振荡周期(按±3%稳态值来确定过渡时间)。
温度℃解:衰减比ψ=8.011)105110()105130(12=-=---B B最大偏差A ,即超调量σ=%8.23%100%100105105130)()()(=⨯=⨯-∞∞-y y t y p余差C=│y ﹙∞﹚-y ﹙0﹚│=105-100=5过渡时间ts=27min ,(计算稳态值的±3%,即102或108,用尺子量后估算出时间) 振荡周期,时间作衰减振荡,所以振荡周期T=20-8=12min ,(两个波峰的时间差) 2.已知某被控过程的数学模型为1)()(+=Ts Ks E s U应用前向差分法,求关于u(k)和e(k)的差分方程。
参考计算控制课本p129 解:)()1()(s E K Ts s U •=+•)()()(s E K s U s U Ts •=+•)()()(t Ke t u Tdtt du =+设采样周期为T S ,代入ST k u k u dtt du )()1()(-+=)()())()1((k Ke k u k u k u ST T =+-+)()1()(k Ke k u k u TT TT T TS S S --++=3.一台仪表的测温范围为100~550℃,绝对误差的最大值为2℃,求这台仪表的相对误差。
解:δ=%44.0%1001005502=⨯-第页4.(1)求出仪表最大绝对误差值;(2)确定仪表的允许误差及精确度等级;(3)仪表经过一段时间使用后,重新校验时,仪表最大绝对误差为±8℃,问该仪表是否还符合出厂时的精确度等级。
解:(1)最大绝对误差值为 6 。
(2)仪表精度δ=%5.1%2.1%10005006≤=⨯-所以允许误差为±1.5%,仪表精度等级为1.5级。
(3)使用一段时间后的精度为δ=%5.1%6.1%10005008≥=⨯-所以不符合出厂时的精确度等级。
5.如下图所示液位控制系统中,被控过程物料的输入量和输出量是什么?控制系统的(1)被控变量、(2)操纵变量、(3)主要扰动、(4)输入信号、(5)输出信号各是什么?Q 26.图所示液位过程的输入量为q 1,流出量为q 2、q 3,液位h 为被控参数,C 为容量系数,设R 1、R 2、R 3为线性液阻,求: (1)列出液位过程的微分方程组; (2)画出液位过程的框图;(3)求液位过程的传递函数W 0(s )=H (s )/Q 1(s )q 2q 3(2)(3)做拉氏变换)()(32)()(1s CsH s Q R s H R s H =--3232321)()(0)(R R s R CR R R s Q s H s W ++==7.用动态特性参数法整定单回路控制系统调节器参数时,测得过程的τ=8s ,T =80s ,自平衡率ρ=1,当调节器分别采用P 、PI 、PID 控制规律时,求ψ=0.75,调节器整定的参数 解:由于1.0808==Tτ,故应用表中2.0≤Tτ时的公式计算。
(1)比例调节比例度1.01==Tτρδ(2)比例积分调节 比例度11.01.11==Tτρδ积分时间s T I4.263.3==τ(3)比例积分微分调节 比例度085.085.01==Tτρδ积分时间s T I 162==τ 微分时间s T D45.0==τ某热交换器图5.1所示,用蒸汽将进入其中的冷水加热到一定的温度,生产工艺要求热水温度保持定值(t ±1℃),试设计一个单回路控制系统,并说明该控制系统的基本工作原理,系统的被控变量、控制量和主要扰动量是什么及选用的控制算法。
8.某前馈控制系统框图如图所示,试通过推导分析,前馈控制器W 1(s )、过程扰动通道传递函数W 2(s )和过程控制通道传递函数W 3(s )满足什么关系时,能够实现对扰动的全补偿?W c (s )W 3(s )W 1(s )W 3(s )W f (s )+_++++F (s )Y (s )X (s )W 2(s)W 1(s)W 3(s)W f (s)W c (s)F(s)Y(s)++_+解:参考计算机控制p38。
求传递函数Y(s)/F(s),然后令分子等于0,即••••++=1)()(312W W W s F s Y0312=+W W W9.某液位过程的阶跃响应实验测得如下数值t /s1h /mm 0 0 0.2 0.8 2.0 3.6 5.4 8.8 11.8 14.4 16.6 18.4 19.2 19.6当其阶跃扰动量为△μ=20%时,求: (1)画出液位过程的阶跃响应曲线;(2)该过程用一阶加滞后环节近似描述,确定液位过程的K 0,T 0,τ。
参考课本p136,作业2-13,(一模一样)解:(1)由实验数据,液位过程的阶跃响应曲线如图所示:(2)取()6.19=∞y ,则()98%206.190===∆∞μY K取()39.01=*t y ,()63.02=*t y ,由()()()∞*=y t y t y 在图上得到1261≈t ,1952≈t 代入式中,得138)(2120=-=t t T 57221=-=t t τ校验数据: 当τ<3t 时,即573<t ,()0093.03≈=*t y当4.167)8.0(04=+=τT t 时,()55.0542.04≈=*t y当333)2(05=+=τT t 时,()865.0877.05≈=*t y所以该液位过程近似为:s s s s T K e e s W 571138981000)(-+-+⨯==τ012020h (mm)10、在蒸汽锅炉运行过程中,必须满足汽-水平衡关系,汽包水位是一个十分重要的指标。
当液位过低时,汽包中的水易被烧干引发生产事故,甚至会发生爆炸。
(1)试设计一个液位的简单控制系统,在图中画出控制方案图。
(2)确定调节阀的气开、气关形式,并说明原因。
(3)确定调节器的正、反作用方式,必须有详细的分析过程。
(4)画出该控制系统的方框图。
11、在某生产过程中,通过加热炉对冷物料加热,根据工艺要求,需对热物料出口温度进行严格控制。
对系统分析发现,主要扰动为燃料压力波动。
(1)试设计一个热物料出口温度的串级控制系统,在图中画出控制方案图。
(2)画出该控制系统方框图。
(3)为保证设备安全,炉温不能过高,确定调节阀的气开、气关形式。
(4)确定两台调节器的正反作用方式,必须有详细的分析过程。
(5)确定两台调节器应选择什么调节规律。
12、右图为一个加热器控制系统,通过将进料(流体)与蒸汽进行换热达到对物料(流体)进行q)为最主要的干扰。
(1)加热的目的,希望出料(流体)温度恒定。
其中已知进料(流料)流量(v试选用合适的的控制方案,说明理由,并画出控制系统框图和结构图。
(2)为保证设备安全,出料温度不能过高,确定调节阀的气开、气关形式。
确定调节器的正反作用以及应选择什么调节规律。
13、右下图所示的氨冷器,用液氨冷却铜液,要求出口铜液温度恒定。
为保证氨冷器内有一定的汽化空间,避免液氨带入冰机造成事故,采用温度――液位串级控制。
1)此串级控制系统的主副被控变量各是什么?2) 试设计一温度—-液位串级控制系统,完成该控制方案的结构图(即将图示的氨冷器控制系统示意图补充完整);3)试画出温度――液位串级控制系统控制框图;4)确定气动调节阀的气开气关形式,并说明原因;5)确定主副调节器的正反作用。
14、一个如图所示的换热器,用蒸汽将进入其中的冷水加热到一定温度,生产工艺要求热水温度维持恒定(Δθ≤±1℃)。
试设计一简单温度控制系统,画出其方框图,并确定调节阀的气开、气关形式和调节器的正、反作用方式,指出调节器应选择什么调节规律?15.某台测温仪表的测温范围为200~700℃,仪表的最大绝对误差为±4℃,试确定该仪表的允许误差和精度等级。
%1%8.0%1002007004≤=⨯=-δ所以允许误差为±1.0%,仪表精度等级为1.0级。
16.某被测参数的测量范围要求为0~1000kPa,根据工艺要求,用来测量的绝对误差不能超TT TC LCLT铜液液氨气氨过±8kPa ,问选用何种精度等级的压力测量仪表才能满足要求。
%1%8.0%10010008≤=⨯=δ所以允许误差为±1.0%,仪表精度等级为1.0级。