视距三角形
视距三角形word版本

为了保证驾驶人员行车安全,能随时看到前方的道路和道路上出现的障碍,或迎面驶来的车辆,以便能采取安全措施,避免事故发生的最短距离,称为行车时距,简称视距。
视距可分为停车视距、会车视距、超车视距、交叉视距、弯道视距和纵坡视距。
其中与道路交叉处行车直接相关的包括停车视距和交叉视距。
停车视距:由驾驶员反应时间内汽车行驶的距离、汽车的制动距离和安全距离三部分组成。
停车视距(St)=驾驶人员反应时间内车辆行驶的距离+车辆制动距离+车辆在障碍物前面停止的安全距离。
(表1)一般城市道路计算行车速度20-60KM/h,停车视距在20-75米之间,可以理解为驾驶人员反应越快、车辆制动性能越好、行车速度越慢停车视距越小,但确定行车视距有统一标准,其计算公式:St=V*T反/3.6+V2/254φ2+L安,安全一般可以取5米。
式中:T反——驾驶员反应时间,取2.5s;φ2——路面与轮胎之间的纵向摩阻系数,因轮胎、路面、制动等条件不同而异,计算停车视距一般按路面潮湿状态考虑;V——行驶速度。
当设计速度为120~80km/h时为其85%;当设计速度为60~40km/h时为其90%;设计速度为30~20km/h时为其100%。
(表2)L安——安全距离,5~10m表1 城市道路停车视距表2 各类各级道路计算行车速度通量、地形等分为Ⅰ、Ⅱ、Ⅲ级,分别对应大城市、中等城市和小城市。
在实际中,由于我国城市中机动车拥有水平飞速发展,交通问题远远不同于1990年标准发布时的情况,车辆运行速度一般达不到上述水平。
交叉视距:在保证两条相交道路上直行车辆都有安全的停车距离的情况下,还必须保证驾驶人员的视线不受遮挡,由两相交叉的停车视距和视线组成了交叉口视距空间和限界,又称为视距三角形(图1)。
视距三角形是从最不利的情况考虑的,它是最靠道路右侧第一条直行车道的轴线与相交道路最靠中间的直行车道的轴线,以停车视距为边长所构成的三角形。
要求在限界内清除高于1.2m的障碍物,以保证车辆进入交叉口时,驾驶人员能看清相交道路上车辆的行驶情况,避免车辆相撞。
视距测量的原理
视距测量的原理视距测量是一种常见的测量方法,它利用观测者的视线与目标物体之间的距离和高度差来进行测量。
视距测量的原理是基于几何学和三角学的基本原理,通过观察和测量目标物体在视野中的位置和角度,从而计算出目标物体与观测者之间的距离。
视距测量在地理测量、建筑测量、军事侦察等领域都有着广泛的应用。
首先,视距测量的原理基于三角形的相似性原理。
当观测者和目标物体之间存在一定距离时,它们之间形成的三角形可以视为相似三角形。
通过测量观测者与目标物体之间的角度和距离,可以利用相似三角形的性质来计算出目标物体的实际距离。
这种方法可以在不直接接触目标物体的情况下,通过远距离进行测量,具有很大的实用性。
其次,视距测量的原理还涉及到大地曲率的影响。
在地球表面进行远距离的视距测量时,需要考虑到大地曲率对测量结果的影响。
由于地球是一个近似于椭球体的三维空间,因此在进行远距离的视距测量时,需要考虑地球曲率引起的高度差,以及地球曲率对视线的影响。
这些因素需要进行修正和校正,以确保测量结果的准确性。
此外,视距测量的原理还包括大气折射的影响。
在大气环境中进行远距离的视距测量时,大气折射会对光线的传播路径产生影响,从而导致目标物体在视野中的位置发生偏移。
因此,需要对大气折射进行修正,以消除其对测量结果的影响。
总之,视距测量的原理是基于几何学和三角学的基本原理,通过测量观测者与目标物体之间的角度和距离,利用相似三角形的性质来计算出目标物体的实际距离。
在实际应用中,还需要考虑地球曲率和大气折射对测量结果的影响,并进行相应的修正和校正。
视距测量作为一种重要的测量方法,具有广泛的应用前景,在地理测量、建筑测量、军事侦察等领域都有着重要的作用。
视距三角形绘制的方法
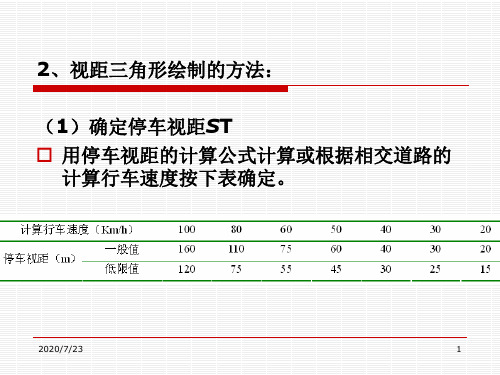
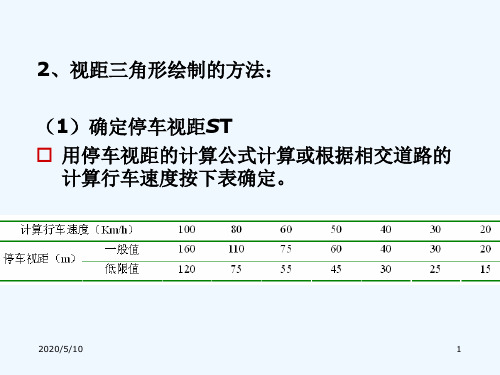
(1)确定停车视距ST 用停车视距的计算公式计算或根据相交道路的
计算行车速度按下表确定。
2020/7/23
1
(2)找出行车最危险的冲突点
不同形式的交叉口的最危险冲突点并不相同。 十字交叉:最靠右侧的第一条直行机动车道的轴线与
相交道路最靠中心线的第一条直行车道的轴线所构成 的交叉点为最危险冲突点。
2020/7/23
4
平面交叉口平面设计
1、交叉口圆曲线半径设计 2、交叉口的拓宽设计
2020/7/23
5
2020/7/23
ห้องสมุดไป่ตู้
2
T形(Y形)交叉口:直行道路最靠右侧的第一条直行 机动车道的轴线与相交道路最靠中心线的第一条左转 车道的轴线所构成的交叉点为最危险冲突点。
2020/7/23
3
(3)找到冲突点后,便可确定停车视距ST及构 成视距三角形:从最危险的冲突点向后沿行车 轨迹各量取停车视距ST,连接末端构成视距三 角形。
视距三角形

视距三角形视距三角形【sight triangle】指的是平面交叉路口处,由一条道路进入路口行驶方向的最外侧的车道中线与相交道路最内侧的车道中线的交点为顶点,两条车道中线各按其规定车速停车视距的长度为两边,所组成的三角形。
在视距三角形内不允许有阻碍司机视线的物体和道路设施存在。
保证两条相交道路上直行车辆都有安全的停车视距的前提是必须保证驾驶员视线不受遮挡,由两车的停车视距和视线组成了交叉口视距空间和限界,又称视距三角形。
要求在视距三角形限界内清除高度超过1.2m的障碍物。
按最不利情况,考虑最靠右的一条直行车道与相交路最靠中间的直行车道的组合确定视距三角形的位置。
行车视距对交通安全十分重要,在交叉口必须充分考虑这一要素,特别是无交通控制的平面交叉路口,应使驾驶员在足够长度的距离内看清路口,以及相交道路上的交通情况,以保证行车安全。
但是由于道路等级的不同,交叉路口的大小及道路宽度的不同,在低级道路或支路上的交叉口,往往因路口旁边建筑物和树木等影响到驾驶员的视线,形成一定的视线盲区。
同样,迎面横路上车辆的视线也会受到阻碍。
当两个方向行驶的车辆开始看到对方时,如图1-10所示,将两车所处的位置A、B两点与两车相交点K所构成的三角形称为视距三角形。
从图中可以看出,如果两车相距K点不等,而且相差较大,又行驶速度相同,则两车会以先后次序安全通过相交点K;如果两车相距K点相等,且距K点较近、车速相同又较快,就容易发生碰撞事故;如果两车相距K点不等,车速也不相同,距K点远的速度快,距K点近的速度慢,这样也可能同时到达K点而发生危险。
因此,在影响视距的交叉路口,驾驶员应提前减速,做好应急推备,以保证安全通过路口。
在交通流量不大的路口,通常不设让路和停车标志,也没有采用交通信号控制。
车辆进入交叉路口的时机和行车速度由驾驶员自行掌握。
一般情况下,主干路车辆有优先权,次于路车辆应等待并寻找主干路上车流的间隙通过。
对采用停车控制方式的主于路和次干路,交叉路口主干路是优先道路。
视距三角形绘制的方法
(1)确定停车视距ST 用停车视距的计算公式计算或根据相交道路的
计算行车速度按下表确定。
2019/6/7
1
(2)找出行车最危险的冲突点
不同形式的交叉口的最危险冲突点并不相同。 十字交叉:最靠右侧的第一条直行机动车道的轴线与
相交道路最靠中心线的第一条直行车道的轴线所构成 的交叉点为最危险冲突点。
2019/6/7
4
平面交叉口平面设计
1、交叉口圆曲线半径设计 2、交叉口的拓宽设计
2019/6/7
5
2019/6/7靠右侧的第一条直行 机动车道的轴线与相交道路最靠中心线的第一条左转 车道的轴线所构成的交叉点为最危险冲突点。
2019/6/7
3
(3)找到冲突点后,便可确定停车视距ST及构 成视距三角形:从最危险的冲突点向后沿行车 轨迹各量取停车视距ST,连接末端构成视距三 角形。
视距测量的基本原理和应用

视距测量的基本原理和应用1. 什么是视距测量视距测量是一种用于测量两点或多点之间的距离的方法,它基于人眼对物体的可见性以及视觉感知的原理。
通过测量两个物体之间的视距,可以得出它们之间的实际距离。
2. 视距测量的原理视觉感知是人类最主要的感官之一,我们通过眼睛收集到的图像来感知和理解世界。
视觉感知的原理是基于光的传播和反射。
当光线从一个物体上反射回来并进入我们的眼睛时,我们就能够看到这个物体。
在视距测量中,我们可以利用光线传播的原理来计算两个物体之间的距离。
具体来说,我们可以使用三角测量法来实现。
三角测量法基于两个基本原理:相似三角形原理和三角函数原理。
首先,我们需要找到一个参考物体,并测量出我们与这个物体之间的观察角度。
然后,我们利用相似三角形原理,使用测得的观察角度和已知物体的实际尺寸来计算未知物体的实际距离。
3. 视距测量的应用3.1 地理测量视距测量在地理测量中有着广泛的应用。
例如,在地图制作过程中,可以使用视距测量来确定地物之间的距离。
利用这些测量结果,我们可以更准确地绘制地图,并提供更准确的距离信息。
3.2 建筑设计在建筑设计中,视距测量可以用来确定建筑物之间的间距,以及建筑物与周围环境的关系。
通过测量不同点之间的视距,设计师可以更好地调整建筑物的布局和位置,以实现更好的视觉效果和空间利用。
3.3 交通安全视距测量在交通安全中也起着重要的作用。
在路口的设计中,通过测量车辆与交叉口之间的视距,可以确保车辆能够及时发现潜在的危险情况。
同时,视距测量还可以用于道路标志的布置,保证驾驶员能够及时看到并理解所需的道路信息。
3.4 基础设施规划在城市规划和基础设施规划中,视距测量可以帮助决策者确定建筑物、道路等基础设施的布局和位置。
通过测量不同地点之间的视距,可以评估城市空间的可用性和连通性,为规划者提供科学依据。
4. 注意事项虽然视距测量是一种有效的距离测量方法,但在实际应用中仍需要注意一些事项。
视距三角形

视距三角形【sight triangle】指的是平面交叉路口处,由一条道路进入路口行驶方向的最外侧的车道中线与相交道路最内侧的车道中线的交点为顶点,两条车道中线各按其规定车速停车视距的长度为两边,所组成的三角形。
在视距三角形内不允许有阻碍司机视线的物体和道路设施存在。
TSM交通系统管理,就是已经产生客流了,如何去组织、管理、控制让整个交通系统最高效畅通。
TDM交通需求管理,就是将客流“扼杀”在摇篮里,采取经济措施、法规约束等方法让原本要出行的不出行或减少出行。
道路交通阻抗函数(简称路阻函数)是指路段行驶时间(交叉口延误)与路段(交
叉口)交通负荷之间的函数关系,它是交通分配的关键.
停车视距
停车视距【stopping sight distance】指的是同一车道上,车辆行驶时遇到前方障碍物而必须采取制动停车时所需要最短行车距离。
同一车道上,两部车辆相向行驶,会车时停车则需二倍停车视距,称会车视距。
停车视距由三部分组成:驾驶员反应时间内行驶的距离S1,开始制动汽车到汽车完全停止所行驶距离S2 (制动距离),再加安全距离S0 (5~10m)。
按下式计算:
St=S1+S2+S0=(u1t/3.6)+u12/(254φ2)+S0
式中:t——驾驶员反应时间,取1.2s;
φ2——路面与轮胎之间的纵向摩阻系数,因轮胎、路面、制动等条件不同而异,计算停车视距一般按路面潮湿状态考虑;
u1——行驶速度。
当设计速度为120~80km/h时为其85%;当设计速度为60~40km/h时为其90%;设计速度为30~20km/h时为其100%。
视距三角形
视距三角形-CAL-FENGHAI.-(YICAI)-Company One1为了保证驾驶人员行车安全,能随时看到前方的道路和道路上出现的障碍,或迎面驶来的车辆,以便能采取安全措施,避免事故发生的最短距离,称为行车时距,简称视距。
视距可分为停车视距、会车视距、超车视距、交叉视距、弯道视距和纵坡视距。
其中与道路交叉处行车直接相关的包括停车视距和交叉视距。
停车视距:由驾驶员反应时间内汽车行驶的距离、汽车的制动距离和安全距离三部分组成。
停车视距(St)=驾驶人员反应时间内车辆行驶的距离+车辆制动距离+车辆在障碍物前面停止的安全距离。
(表1)一般城市道路计算行车速度20-60KM/h,停车视距在20-75米之间,可以理解为驾驶人员反应越快、车辆制动性能越好、行车速度越慢停车视距越小,但确/+V2/254φ2+L安,安全一般可以取定行车视距有统一标准,其计算公式:St=V*T反5米。
——驾驶员反应时间,取;式中:T反φ2——路面与轮胎之间的纵向摩阻系数,因轮胎、路面、制动等条件不同而异,计算停车视距一般按路面潮湿状态考虑;V——行驶速度。
当设计速度为120~80km/h时为其85%;当设计速度为60~40km/h时为其90%;设计速度为30~20km/h时为其100%。
(表2)L安——安全距离, 5~10m表1 城市道路停车视距表2 各类各级道路计算行车速度模、设计交通量、地形等分为Ⅰ、Ⅱ、Ⅲ级,分别对应大城市、中等城市和小城市。
在实际中,由于我国城市中机动车拥有水平飞速发展,交通问题远远不同于1990年标准发布时的情况,车辆运行速度一般达不到上述水平。
交叉视距:在保证两条相交道路上直行车辆都有安全的停车距离的情况下,还必须保证驾驶人员的视线不受遮挡,由两相交叉的停车视距和视线组成了交叉口视距空间和限界,又称为视距三角形(图1)。
视距三角形是从最不利的情况考虑的,它是最靠道路右侧第一条直行车道的轴线与相交道路最靠中间的直行车道的轴线,以停车视距为边长所构成的三角形。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
为了保证驾驶人员行车安全,能随时看到前方的道路和道路上出现的障碍,或迎面驶来的车辆,以便能采取安全措施,避免事故发生的最短距离,称为行车时距,简称视距。
视距可分为停车视距、会车视距、超车视距、交叉视距、弯道视距和纵坡视距。
其中与道路交叉处行车直接相关的包括停车视距和交叉视距。
停车视距:由驾驶员反应时间内汽车行驶的距离、汽车的制动距离和安全距离三部分组成。
停车视距(St)=驾驶人员反应时间内车辆行驶的距离+车辆制动距离+车辆在障碍物前面停止的安全距离。
(表1)
一般城市道路计算行车速度20-60KM/h,停车视距在20-75米之间,可以理解为驾驶人员反应越快、车辆制动性能越好、行车速度越慢停车视距越小,但确定行车视距有统一标准,其计算公式:St=V*T反/+V2/254φ2+L安,安全一般可以取5米。
式中:T反——驾驶员反应时间,取;
φ2——路面与轮胎之间的纵向摩阻系数,因、、制动等条件不同而异,计算停车视距一般按路面潮湿状态考虑;
V——行驶速度。
当设计速度为120~80km/h时为其85%;当设计速度为60~40km/h时为其90%;设计速度为30~20km/h时为其100%。
(表2)
L安——,5~10m
表1 城市道路停车视距
表2 各类各级道路计算行车速度
速度
(km/h)
注:条件许可时,宜采用大值。
除快速路外,每类道路按照所在城市的规模、设计交通量、地形等分为Ⅰ、Ⅱ、Ⅲ级,分别对应大城市、中等城市和小城市。
在实际中,由于我国城市中机动车拥有水平飞速发展,交通问题远远不同于1990年标准发布时的情况,车辆运行速度一般达不到上述水平。
交叉视距:在保证两条相交道路上直行车辆都有安全的停车距离的情况下,还必须保证驾驶人员的视线不受遮挡,由两相交叉的停车视距和视线组成了交叉口视距空间和限界,又称为视距三角形(图1)。
视距三角形是从最不利的情况考虑的,它是最靠道路右侧第一条直行车道的轴线与相交道路最靠中间的直行车道的轴线,以停车视距为边长所构成的三角形。
要求在限界内清除高于的障碍物,以保证车辆进入交叉口时,驾驶人员能看清相交道路上车辆的行驶情况,避免车辆相撞。
实际中常依此作为确定交叉口红线位置的条件之一。