A 3-D Ultrasound Robotic Prostate Brachytherapy
Aldefluor肿瘤文献精选
8. Jones RJ, et al. Clonotypic B Cells Circulate in Hodgkins Lymphoma (HL). Blood, ASH Annual Meeting Abstracts 108(11):470, 2006
9. Matsui W, et al. Clonogenic Multiple Myeloma Progenitors, Stem Cell Properties, and Drug Resistance. Cancer Res 68(1):190-7, 2008
18. Kakarala M, et al. Targeting breast stem cells with the cancer preventive compounds curcumin and piperine. Breast Cancer Res Treat 122(3):777-85, 2010
7. Foster SJ, et al. Specificity of the Flow Cytometric Aldehyde Dehydrogenase (ALDH) Assay in Hematopoietic Progenitor Cells and Tumor Cell Lines. Blood, ASH Annual Meeting Abstracts 102(11):3580, 2003
抗菌声动力疗法的作用机制及其抗菌效果影响因素的研究进展
第 49 卷第 5 期2023年 9 月吉林大学学报(医学版)Journal of Jilin University(Medicine Edition)Vol.49 No.5Sep.2023DOI:10.13481/j.1671‑587X.20230535抗菌声动力疗法的作用机制及其抗菌效果影响因素的研究进展Research progress in mechanism of antibacterial sonodynamic therapy and its influencing factors on antibacterial effect李芳, 李红艳, 潘启源, 郭晶莹, 刘敏(吉林大学口腔医院牙周科,吉林长春130021)[摘要]抗菌声动力疗法(aSDT)作为一种基于超声的非侵入性抗菌方式,近些年来受到学者们的广泛关注。
aSDT通过将超声能量集中在组织深处的细菌感染部位,局部激活声敏剂产生高细胞毒性的活性氧(ROS),诱导细菌死亡。
与传统的抗生素治疗细菌感染性疾病比较,aSDT不产生细菌耐药性,同时还具备优越的组织穿透性、良好的生物相容性和超声部位特异性等优点,因此具有更广阔的应用前景。
aSDT的抗菌效果受多种因素影响,包括超声参数、氧气、声敏剂和细菌的类型及结构等,调控上述因素可以增强aSDT的作用效果。
现对aSDT的作用机制(声化学效应和声力学效应)及其抗菌效果的影响因素进行综述,并总结该疗法对不同类型耐药菌种的抗菌作用,为深入理解aSDT的作用机制提供依据。
[关键词]抗菌声动力疗法;细菌感染性疾病;活性氧;超声;抗菌效果[中图分类号]R454.3[文献标志码]A细菌感染是全球医学领域重点关注的问题,虽然抗生素在对抗感染性疾病方面颇有成效,但随着耐药菌株,特别是多重耐药菌的不断增加,抗生素的治疗效果明显降低,因此寻找能够替代抗生素的新型抗菌方法成为治疗细菌感染性疾病的迫切要求[1]。
超声心动图常用中英对照表
超声心动图术语英文对照表:A 面积Abdominal Aorta (AA) 腹主动脉AccT 血流加速时间ALS 主动脉瓣叶开放Angiography 血管显像Ann 瓣环Annotation 注释ASD 心房间隔缺损Automatic gain control 自动增益控制AV 主动脉瓣膜AV- A 连续性方程计算的主动脉瓣膜面积AV Cusp 主动脉瓣膜尖端开放AV Cusp 主动脉瓣膜尖端开放AV Di am) 主动脉瓣膜直径AVA 主动脉瓣膜面积Axill 腋下动脉Axillary Vein 腋静脉Ao 主动脉Ao Arch Diam 主动脉弓直径Ao Asc 升主动脉直径Ao Desc Diam 降主动脉直径Ao Diam 主动脉根部直径Ao Isthmus 主动脉峡部Ao st junct 主动脉ST 接合AR 主动脉返流Asc 上升BBA 基底动脉Basil V 基底静脉Brac V 臂静脉Brightness 辉度、亮度BSA 体表面积Buffer 阻尼器CCalcification (CAL) 钙化Calibration 定标、校正Catheter-based US probe 导管超声探头CCA 颈总动脉Ceph V V 头静脉CFM processing board 彩色多普勒处理功能板Character 字符CI 心脏指数Clear 消除CO 心脏输出量Color capture 彩色捕获Color cut 彩色消除Color doppler energy 彩色多普勒能量图Color doppler flow imaging 彩色多普勒血流显像Color Doppler Flow Imaging (CDFI) 彩色多普勒血流显像Color doppler level 彩色多普勒强度Color edge 彩色边界Color enhance 彩色增强Color flow angiography 彩色血流造影Color lock 彩色锁定Color persistence 彩色余辉Color polarity 彩色极性Color power angio 彩色能量图Color scale display 彩阶显示Color steering 彩色转向Color velocity imaging 彩色速度显像Color video monitor 彩色视频监视器Color wall filter 彩色壁滤波Com Femoral 股总动脉Common Jugular Artery 颈总动脉Confocusing 全场连续聚焦Contrast resolution 对比分辨力Convex (CVX) 凸形、凸阵Convex array 凸阵Cornea 角膜Cross sectional Area (CSA) 切面面积DD 直径Dec 减速度DecT 减速时间Demodulator 解调器、检波器Depth gain compensation 深度增益补偿Desc 递减Detail resolution 细节分辨力Digital image 数字成像Doppler flow-direction resolution 多普勒流向分辨力Doppler flow-velocity distributive resolution 多普勒流速分布分辨力Doppler minimum flow-velocity resolution 多普勒最低流速分辨力Doppler sample volume 多普勒取样容积Dorsal Pedal Artery 足背动脉Duodenum (Du) 十二指肠Dur 持续时间Dynamic focusing 动态聚焦Dynamic frequency scanning 动态频率扫描Dynamic imaging 动态影像Dynamic range 动态范围EECA 颈外动脉Echography sonography 声像图法Ed 心脏舒张EdV 舒张末期容量EF 射血分数Effusion (Eff) 积液Electric focusing 电子聚焦Embolism 栓塞Endoluminal sonography 腔内超声显像EPSS E 点到室间隔分离Erase eliminate 消除EsV 收缩末期容量ET 射血时间External Iliac Artery 髂外动脉External Jugular Vein 颈外静脉FFast time constant 快速时间常数电路Femoral Artery 股动脉Femoral Vein 股静脉Fibrosis (Fib) 纤维化Focal distance 焦距Focus 聚焦Foreign Boby (FB)异物frame correlation 帧相关frame rate 帧率frame resolution 帧分辨力Freeze (FRZ) 冻结Freeze 冻结Frequency Spectrum 频谱FS 短轴缩短率FV 血流容量FVI 血流速度积分GGain 增益Gray scale display 灰阶显示Great Saphenous Vein 大隐静脉HHead circumference (HC) 头围Hematoma (HMA) 血肿HR 心率IICA 颈内动脉Image uniformity 图像均匀性Image-line resolution 图像线分辨力Imaging data 成像数据Inferior Vena Cava (IVC) 下腔静脉Internal Jugular Vein 颈内静脉Interventional ultrasound 介入性超声Intracardiac ultrasonic imaging 心内超声显像Intracavitary probe 腔内探头Intraluminal ultrasonic imaging 管腔内超声显像Intraoperative porbe 术中探头Intraoperative ultrasonic monitoring 术中超声监视Intravascular ultrasonic imaging 血管内超声显像Intravascular ultrasound 血管内超声Invert 倒置、反转IVC 下腔静脉IVRT 等容舒张期IVS 室间隔IVSd 、IVSs 室间隔(收缩期,舒张期)厚度LL 长度LA 左心房LA Diam 左心房直径LA Major 左心房长度LA Minor 左心房宽度LA/Ao Ratio 左心房直径和主动脉根部直径比率LAA 左心房面积LAD 左心房直径Large Intestine 大肠Lateral Ventricle (LV) 侧脑室LV 左心室LVA 左心室面积LVI D 左心室内径LVIDd 舒张期左心室容积LVIDs 收缩期左心室容积LVL 左心室长度LVLd 舒张期左心室内径LVLs 收缩期左心室内径LVM 左心室心肌重量LVOT Diam 左心室流出道直径LVPW 左心室后壁LVPWd 左室后壁舒张期厚度LVPWs 左室后壁收缩期厚度MMagnification Magnify Zoom 放大Mass( M) 包块MCA 大脑中动脉Mcub V 中央静脉Mean Velocity (Mean Vel) 平均速度Menu selection 菜单选择metastasis (Met) 转移灶Minimum flow-velocity of color doppler 彩色多普勒最低流速分辨力Motion discrimination 运动辨别力MPA 主肺动脉MPA 主肺动脉MR 二尖瓣返流ultipurpose scanner 多用途探头Multistage focusing 多段聚焦MVA By PHT 二尖瓣口面积根据压力降半时间MVcf 纤维圆周缩短平均速度MVO 二尖瓣口NNecrosis (Nec) 坏死Node (N) 结节OOT 流出道PP 乳头肌PA 肺动脉Pancreas (P;Pa) 胰腺PAP 肺动脉压力PDA 动脉导管末闭PEd 心包渗出舒张期Penetration depth 穿透深度PEP 射血前期Peripheral Vessel (PV)外周血管PFO 卵圆孔未闭PG 压力阶差Phased annular array probe 环阵相控探头PHT 压力降半时间PISA 最近等速线表面面积Popliteal Artery 腘动脉Popliteal Vein 腘静脉Post process 后处理Pre process 前处理Preset 预设置Prostate (Pro) 前列腺Ps 心脏收缩Pulmonic Diam 肺动脉瓣膜直径PV 肺动脉瓣PV Ann Diam 肺动脉瓣环面直径PV-A 连续性方程计算的肺动脉瓣口面积PVein 肺静脉PW 后壁QQp 肺循环血流量Qs 体循环血流量Quadrate Lobe (QL) 方叶RRA 右心房RAA 右心房面积Rad 半径RAD 右心房直径Real-time imaging 实时成像Record 记录Rejection reject suppression 抑制Rendering play back 回放Reset 重调、复原Reversed Flow (RF) 返流Right Ventricle (RV) 右心室RPA 右肺动脉RPA 右肺动脉RV 右心室RVA 右心室面积RVAW 右心室前壁RVD 右心室直径RVID 右心室内径RVL 右心室长度RVOT 右心室流出道SScan mode 扫描方式Scanner (SCNR) 扫描器、探头Sector Angle (Sec Ang) 扇扫角度Sector scanning 扇扫Sediment (Sed) 沉积物Segment focusing 分段聚焦Sensitivity time control 灵敏度时间控制Sensor 传感器Septum Pellucidum (SP) 透明隔;透明隔腔Sequential focusing 连续聚焦Shift 变换Short Saphenous Vein 小隐静脉SI 搏动指数Sliging focusing 滑动聚焦Sonogram echogram 声像图Spatial resolution 空间分辨力Spatial resolution of color doppler 彩色多普勒空间分辨力ST 缩短% STIVS 心室缩短百分比SUBC 锁骨下动脉Subclavian Vein (SCV) 锁骨下静脉Sup Femoral 股浅动脉SV 每搏量SVI 每搏量指数TT 时间TA 三尖瓣环TAML 三尖瓣环面中部到侧部Tar get_r(TAR) 靶团Temporal resolution 瞬时分辨力Thoracic cavity 胸腔Thoracic Circumference (Th C) 胸围Three dimensional display 三维显示3D image reconstruction 三维图像重建Thrombus (Th) 血栓Time gain compensation 时间增益补偿Time resolution of color doppler 彩色多普勒时间分辨力Tissue specific imaging 组织特性成像TR 三尖瓣返流Trans AVA(d)、Trans AVA(s) 横向主动脉瓣膜面积Transcranial doppler 经颅多普勒Transcranial Doppler ( TCD) 经颅多普勒Transducer 换能器Transesophagel echocardiography probe (TEE)经食管超声心动图探头Transesophagel probe 食管探头Trigger 触发器Tumor (T) 肿瘤TV 三尖瓣膜TVA 三尖瓣口面积UUltrasonic imaging 超声成像Ultrasound catheter 超声导管Ultrasound guided percutaneous Ultrasound guided probe 穿刺探头US guided percutaneous alcohol injection超声引导经皮穿刺注射乙醇US guided percutaneous aspiration 超声引导经皮抽吸VVel 速度VERT 椎动脉VET 瓣膜射血时间Vmax 最大速度Vmean 平均速度VSD 室间隔缺损VTI 速度时间积分WWall (W) 壁Wide-band probe 宽频带探头Write 写入ZZero adjustment 零位调整Zone focusing 区域聚焦【下载本文档,可以自由复制内容或自由编辑修改内容,更多精彩文章,期待你的好评和关注,我将一如既往为您服务】。
List of contaminated cell lines
List of contaminated cell linesFrom Wikipedia, the free encyclopediaThis is a list of cell cultures which have been cross-contaminated and overgrown by other cells. A project is currently underway to enumerate and rename contaminated cell lines to avoid errors in research caused by misattribution (Masters, 2002). Estimates based on screening of leukemia-lymphoma cell lines suggest that about 15% of these cell lines are not representative of what they are usually assumed to be (Drexler et al., 2002).Contaminated cell lines have been extensively used in research without knowledgeof their true character. For example, most if not all research on the "endothelium"ECV-304 or the "megakaryocyte" DAMI cell lines has in reality been conductedon bladder carcinoma and erythroleukemia cells, respectively. Thus, all research on endothelium- or megakaryocyte-specific functions utilizing these cell lines has turned out to be worthless, except as a warning example.There are two principal ways a cell line can become contaminated: cell cultures are often exchanged between research groups; if, during handling, a sample gets contaminated and then passed on, subsequent exchanges of cells will lead to the contaminating population being established, although parts of the supposed cell line are still genuine. More serious is contamination at the source: during establishmentof the original cell line, some contaminating cells are accidentally introduced into the cultures, where they in time outgrow the desired cells. The initial testing, in this case, still suggested that the cell line is genuine and novel, but in reality, it has disappeared soon after being established and all samples of such cell lines are actually the contaminant cells. It requires lengthy research to determine the precise point where cell lines have become contaminated.Cell lines marked Virtual in the table below are known instances of contamination at the source; these cell lines went extinct or never existed. Cases where non-contaminated lines are known or strongly suspected to exist are marked Extant Contaminated cell lines should never be used for research demanding the specific type of cell line they are assumed to be, and most of them should ideally bediscarded or at least not used in research at all, except when the contaminant cells have acquired novel characteristics (e.g., by mutation or viral transfection, for example the HeLa derivate Det98) and thus constitute a novel lineage after all.If in doubt, researchers should test cell lines for authenticity; the references listed below contain some papers on how common contaminants can be recognized. It is worth noting that the widespread contamination with HeLa cells was initially recognized by Walter Nelson-Rees using simple Giemsa stain karyotyping undera light microscope. This technique works well in recognizing HeLa because thesecells have distinctive chromosome aberrations.Novel cell lines should be proliferated and distributed and/or deposited at a safekeeping institution such as the ATCC as soon as possible after establishment, to minimize the odds that the line becomes spoiled by contamination. It is goodpractice to periodically check cell lines maintained under laboratory conditions (i.e.,not placed in long-term storage) for contamination with HeLa or other common contaminants, to ensure that their quality and integrity is maintained.Contents[hide]∙ 1 Lists of contaminated cell lineso 1.1 Contaminated human cell lineso 1.2 Contaminated non-human cell lines∙ 2 ReferencesLists of contaminated cell lines[edit]If no species is given in the individual entries, the table's species applies to both the assumed and the actual cell types.This is an incomplete list, which may never be able to satisfy particular standards for completeness. You can help by expanding it with reliably sourced entries. Contaminated human cell lines[edit]Supposed cell line Extant?Supposed celltypeRealcelllineReal cell type Reference207 Extant? pre-B cell leukemia REH orCCRF-CEMpre-B cell or Tcell leukemiaMacLeod etal. (1999)2474/90 Virtual stomach carcinoma HT-29 colon carcinoma MacLeod et al. (1999)2563, MAC-21 lung lymphoma HeLacervical adenocarcinomaNelson-Rees etal. (1981)2957/90 Virtual stomach carcinoma HT-29 colon carcinoma MacLeod et al. (1999)3051/80 Virtual stomach carcinoma HT-29 colon carcinoma MacLeod et al. (1999)ADLC-5M2 Virtual lung carcinoma HeLacervical adenocarcinomaMacLeod etal. (1999)AG-F Virtual Hodgkin's disease CCRF-CEMvariantT cell leukemiaDrexler etal. (1999)AO amnion HeLa cervical adenocarcinomaNelson-Rees &Flandermeyer(1976)ARH-77 Extant? plasmacell leukemiaunknownEpstein-Barrvirus-transfected BDrexler etal. (1999)osed cell line Extant?Supposed celltypecelllineReal cell type ReferenceCMP, CMPII C2 intestinal adenocarcinomaHeLacervical adenocarcinomaNelson-Rees &Flandermeyer(1976)CO (COLE) Virtual Hodgkin's diseaseCCRF-CEMT cell leukemiaDrexler etal. (1999)COLO-818 melanomaCOLO-800melanomaMacLeod etal. (1999)D18T synovial cell HeLa cervical adenocarcinomaNelson-Rees &Flandermeyer(1976)DAMI Virtual megakaryocytic HEL erythroleukemia MacLeod et al. (1997a, b)DAPT pilocyticastrocytomaHeLacervical adenocarcinomaNelson-Rees &Flandermeyer(1976)Det6(Detroit 6) sternal marrow HeLacervical adenocarcinomaNelson-Rees &Flandermeyer(1976)Det30A(Detroit 30A) carcinoma ascites HeLacervical adenocarcinomaNelson-Rees &Flandermeyer(1976)Det98 (Detroit 98), Det98/AG,Det98/A H-2, Det98/A HR sternal marrow HeLacervical adenocarcinomaNelson-Rees &Flandermeyer(1976)DD Virtual malignanthistiocytosisK-562terminal CMLDrexler etal. (2003)EB33 prostate HeLa cervical adenocarcinomaNelson-Rees &Flandermeyer(1976)osed cell line Extant?Supposed celltypecelllineReal cell type ReferenceECV-304 Virtual normal endothelium T-24 bladder carcinomaDirks etal. (1999); Lacroix (2008)EH Virtual hairy cell leukemia HK hairy cellleukemiaDrexler etal. (2003)ElCo breast carcinoma HeLa cervical adenocarcinomaNelson-Rees &Flandermeyer(1976)EPLC-65 Virtual lung carcinoma HeLa cervical adenocarcinomaMacLeod etal. (1999)EPLC3-2M1 Virtual lung carcinoma HeLacervical adenocarcinomaMacLeod etal. (1999)ESP1Sporadic Burkitt'slymphomaHeLacervical adenocarcinomaNelson-Rees &Flandermeyer(1976)EU-1 Virtual pre-B cell leukemia REH pre-Bcell leukemiaDrexler etal. (2003)EU-7 Virtual T cell leukemia CCRF-CEMT cell leukemiaDrexler etal. (2003)EUE fetal subcutis HeLa cervical adenocarcinomaNelson-Rees etal. (1981)EVLC2 transfected umbilical veinendotheliumunknown non-endothelial?Unger etal. (2002)F2-4E5 Virtual thymus epithelium SK-HEP-1liver carcinomaMacLeod etal. (1999)F2-5B6 Virtual thymus epithelium SK-HEP-1liver carcinomaMacLeod etal. (1999)F255A4 ??? HeLa cervical adenocarcinomaNelson-Rees etal. (1981)FL, FLA amnion HeLa cervical adenocarcinomaNelson-Rees &Flandermeyer(1976)osed cell line Extant?Supposed celltypecelllineReal cell type ReferenceKBM-3 Extant monocytic leukemia HL-60myeloblastic leukemiaDrexler etal. (2003)KE-37 Extant T cell leukemia CCRF-CEMT cell leukemiaDrexler etal. (1999)KM-3 Extant? pre-B cell leukemia REH pre-Bcell leukemiaDrexler etal. (1999)KMS-21-BM Extant? myeloma unknown unknownDrexler etal. (2003)KPB-M15 Virtual terminal CML KYO-1 terminal CML Drexler et al. (2003)KP-P1prostate carcinoma HeLa cervical adenocarcinomaNelson-Rees &Flandermeyer(1976)L132 embryonic lung epitheliumHeLacervical adenocarcinomaNelson-Rees &Flandermeyer(1976); Lacroix (2008)L-540 Extant Hodgkin's disease CCRF-CEMT cell leukemiaDrexler etal. (2003)L-591 Extant? Hodgkin's disease unknown Epstein-Barrvirus-transfected B celllymphoblastoidDrexler etal. (2003)LR10.6 Virtual pre-B cell leukemia NALM-6 pre-Bcell leukemiaMacLeod etal. (1999)LU fetal lung HeLa cervical adenocarcinomaNelson-Rees etal. (1981)LU 106 embryonic lung HeLa cervical adenocarcinomaNelson-Rees etal. (1981)LED-Ti cervical carcinoma HeLa cervical adenocarcinomaNelson-Rees etal. (1981)M10T synovial cell HeLa cervical adenocar Nelson-Rees &Flandermeyerosed cell line Extant?Supposed celltypecelllineReal cell type ReferenceMOLT-15 Virtual T cell leukemia CTV-1 monocytic leukemiaMacLeod etal. (1999)MT-1 Virtual breast carcinoma HeLa cervical adenocarcinomaMacLeod etal. (1999); Lacroix (2008)MUTZ-4 Extant T cell leukemia MUTZ-3 monocytic leukemiaDrexler etal. (1999)NCTC2544, NCTC30 75 skin epithelium HeLacervical adenocarcinomaNelson-Rees &Flandermeyer(1976); Lacroix (2008)NOI-90 Virtual natural killercell lymphomaREHpre-Bcell leukemiaDrexler etal. (2003)OE endometrium HeLa cervical adenocarcinomaNelson-Rees &Flandermeyer(1976)OU-AML-1, -2. -3, -4, -5, -6, -7, -8 Virtualacute myeloidleukemiaOCI/AML2monocytic leukemiaDrexler etal. (2003)P1-1A3 Virtual thymus epithelium SK-HEP-1liver carcinomaMacLeod etal. (1999)P1-4D6 Virtual thymus epithelium SK-HEP-1liver carcinomaMacLeod etal. (1999)P39/Tsug ane Extantmyeloblastic leukemiaHL-60myeloblastic leukemiaDrexler etal. (2003)PBEI Virtual pre-B cell leukemia NALM-6 pre-Bcell leukemiaMacLeod etal. (1999)PLB-985 Virtual monocytic leukemia HL-60myeloblastic leukemiaDrexler etal. (2003)RAMAK-1 Virtual muscle synovium T-24bladder carcinomaMacLeod etal. (1999)osed cell line Extant?Supposed celltypecelllineReal cell type ReferenceRBHF-1 Virtual hepatoma unknown non-humanmammal cell lineMacLeod etal. (1999)RC-2A Extant? monocytic leukemia CCRF-CEMT cell leukemiaDrexler etal. (1999)RED-3 Virtual acute myeloidleukemiaHL-60myeloblastic leukemiaDrexler etal. (2003)REH-6 Extant? pre-B cell leukemia unknown Laboratorymouse cell lineDrexler etal. (1999)RM-10 Virtual terminal CML K-562terminal CML Drexler et al. (1999)RPMI-6666 Hodgkin's disease unknownEpstein-Barrvirus-transfected BcelllymphoblastoidDrexler etal. (2003)RPMI-8402 Extant T cell leukemia unknown unknownDrexler etal. (1999); Lacroix (2008)RS-1 Extant? megakaryoblastic leukemiaK-562terminal CMLDrexler etal. (2003)Rsp Hodgkin's disease unknown Epstein-Barrvirus-transfected B celllymphoblastoidDrexler etal. (2003)RT4 bladder carcinoma HeLa cervical adenocarcinomaNelson-Rees &Flandermeyer(1976)RY Hodgkin'sdisease spleenindeterminatespleen?Nelson-Rees etal. (1981)SA4 liposarcoma HeLa cervical adenocarcinomaNelson-Rees &Flandermeyer(1976)SAM-1 Virtual terminal CML K-562terminal CML Drexler et al. (2003)osed cell line Extant?Supposed celltypecelllineReal cell type ReferenceSBC-2 Virtual bladder carcinoma HeLa cervical adenocarcinomaMacLeod etal. (1999)SBC-7 Virtual bladder carcinoma HeLa cervical adenocarcinomaMacLeod etal. (1999)SCLC-16H, -24H Virtualsmallcell lung carcinomaSCLC-21/22Hsmallcell lung carcinomaMacLeod etal. (1999)SH-2 breast carcinoma HeLa cervical adenocarcinomaNelson-Rees &Flandermeyer(1976)SH-3 breast carcinoma HeLa cervical adenocarcinomaNelson-Rees &Flandermeyer(1976)SPI-801, -802 Virtual T cell leukemia K-562terminal CMLMacLeod etal. (1999)SR-91 Virtual T cell leukemia AML-193 monocytic leukemiaDrexler etal. (2003)SW-527 tumor SW-480/SW-620colon adenocarcinomaNelson-Rees etal. (1981)SW-598 tumor SW-480/SW-620colon adenocarcinomaNelson-Rees etal. (1981)SW-608 tumor SW-480/SW-620colon adenocarcinomaNelson-Rees etal. (1981)SW-613 tumor SW-480/SW-620colon adenocarcinomaNelson-Rees etal. (1981)SW-732 tumor SW-480/SW-620colon adenocarcinomaNelson-Rees etal. (1981)SW-733 tumor SW-480/SW-colon adenocarcin Nelson-Rees etosed cell line Extant?Supposed celltypecelllineReal cell type Reference620 oma al. (1981)T-1 kidney HeLa cervical adenocarcinomaNelson-Rees etal. (1981)T-9 transfected somatic HeLa cervical adenocarcinomaNelson-Rees &Flandermeyer(1976)T-33 Extant? terminal CML K-562terminal CML Drexler et al. (2003)TDL-1, TDL-2 tonsil lymphoid P3JHR-1Burkitt'slymphomaNelson-Rees etal. (1981)TDL-3 tonsil lymphoid RPMI-1788lymphoblastoidNelson-Rees etal. (1981)TDL-4 tonsil lymphoid Raji Burkitt'slymphomaNelson-Rees etal. (1981)TI-1 Virtual myeloblastic leukemiaK-562terminal CMLDrexler etal. (2003)TMM terminal CML unknown Epstein-Barrvirus-transfected B celllymphoblastoidDrexler etal. (1999)TuWi Wilms' Tumor HeLa cervical adenocarcinomaNelson-Rees &Flandermeyer(1976)U-937Extant histiocytic lymphomaunknown unknownDrexler etal. (1999)UMJF-2 myeloma unknown Epstein-Barrvirus-transfected B celllymphoblastoidDrexler etal. (2003)UT-7 Extant histiocytic lymphomaunknown unknownDrexler etal. (1999)UTMB-Virtual B cell CCRF-T cell leukemia Drexler et[edit]References[edit]∙Chen, T. R. (1988): Re-evaluation of HeLa, HeLa S3, and Hep-2 karyotypes. Cytogenetics and Cell Genetics48: 19-24. HTML abstract∙Dirks, Willy G.; MacLeod, Roderick A. F. & Drexler, Hans G. (1999): ECV304 (endothelial) is really T24 (bladder carcinoma): cell line cross-contaminationat source. In Vitro Cellular & Developmental Biology35: 558–559.∙Drexler, Hans G.; Dirks, Willy G. & MacLeod, Roderick A. F. (1999): False human hematopoietic cell lines: cross-contaminations andmisinterpretations. Leukemia13: 1601–1607. HTML abstract∙Drexler, Hans G.; MacLeod, Roderick A. F. & Dirks, Willy G. (2001): Cross-contamination: HS-Sultan is not a myeloma but a Burkitt lymphoma cellline. Blood98: 3495–3496. PDF fulltext∙Drexler, Hans G.; Quentmeier, H.; Dirks, Willy G.; Uphoff, Cord C. & MacLeod, Roderick A. F. (2002a): DNA profiling and cytogenetic analysis ofcell line WSU-CLL reveal cross-contamination with cell line REH (pre B-ALL). Leukemia16: 1868–1870. doi:10.1038/sj.leu.2402610 (HTML abstract)∙Drexler, Hans G.; Uphoff, Cord C.; Dirks, Willy G. & MacLeod, Roderick A. F.(2002b): Mix-ups and mycoplasma: the enemies within. LeukemiaResearch26: 329–333. doi:10.1016/S0145-2126(01)00136-9 (HTML abstract)∙Drexler, Hans G.; Dirks, Willy G.; Matsuo, Y. & MacLeod, Roderick A. F.(2003): False leukemia–lymphoma cell lines: an update on over 500 celllines. Leukemia17: 416–426.doi:10.1038/sj.leu.2402799 (HTMLabstract) HTML partial fulltext∙Lacroix, Marc (2008): Persistent use of "false" cell lines. International Journal of Cancer122: 1–4. doi:10.1002/ijc.23233PMID 17960586 (HTML abstract) ∙MacLeod, Roderick A. F.; Dirks, Willy G.& Drexler, Hans G. (1997a): Early Contamination of the Dami Cell Line by HEL. Blood90: 2850-2851. PDFfulltext∙MacLeod, Roderick A. F.; Dirks, Willy G.; Reid, Y. A.; Hay, R. J. & Drexler, Hans G. (1997b): Identity of original and late passage Dami megakaryocyteswith HEL erythroleukemia cells shown by combined cytogenetics and DNAfingerprinting. Leukemia11: 2032–2038. HTML abstract∙MacLeod, Roderick A. F.; Dirks, Willy G.; Matsuo, Y.; Kaufmann, M.; Milch, H.& Drexler, Hans G. (1999): Widespread intraspecies cross-contamination ofhuman tumor cell lines arising at source. International Journal of Cancer83:555-563. HTML abstract∙Masters, John R. (2002): HeLa cells 50 years on: the good, the bad and the ugly. Nature Reviews Cancer2: 315-319. doi:10.1038/nrc775 (HTML abstract)∙Nelson-Rees, W. A. & Flandermeyer, R. R. (1976): HeLa cultures defined. Science191: 96–98. HTML abstract∙Nelson-Rees, W. A.; Daniels, D. W. & Flandermeyer, R. R. (1981): Cross-contamination of cells in culture. Science212: 446–452. doi:10.1126/science.6451928 (HTML abstract)∙Unger, Ronald E.; Krump-Konvalinkova, V.; Peters, K. & Kirkpatrick, C. J.(2002): In Vitro Expression of the Endothelial Phenotype: Comparative Study of Primary Isolated Cells and Cell Lines, Including the Novel Cell LineHPMEC-ST1.6R. Microvascular Research64: 384–397. Pubmed。
癌症缩写对照表
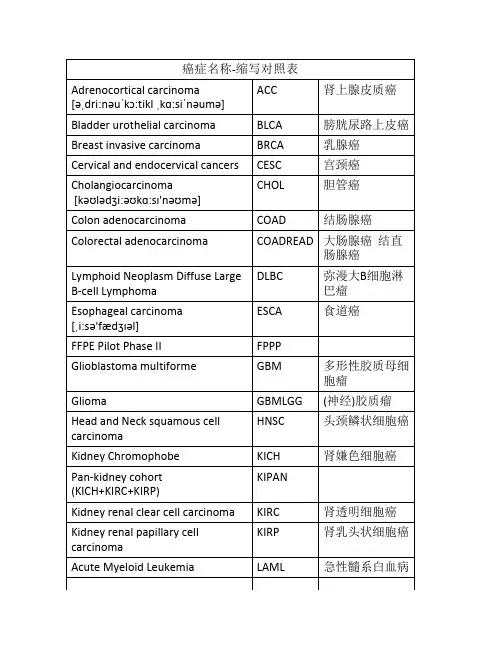
癌症名称-缩写对照表Adrenocortical carcinoma[əˌdri:nəuˈkɔ:tikl ˌkɑ:siˈnəumə]ACC肾上腺皮质癌Bladder urothelial carcinoma BLCA膀胱尿路上皮癌Breast invasive carcinoma BRCA乳腺癌Cervical and endocervical cancers CESC宫颈癌Cholangiocarcinoma[kəʊlədʒi:əʊkɑ:sɪ'nəʊmə]CHOL胆管癌Colon adenocarcinoma COAD结肠腺癌Colorectal adenocarcinoma COADREAD大肠腺癌结直肠腺癌Lymphoid Neoplasm Diffuse Large B-cell Lymphoma DLBC弥漫大B细胞淋巴瘤Esophageal carcinoma[ˌi:sə'fædʒɪəl]ESCA食道癌FFPE Pilot Phase II FPPPGlioblastoma multiforme GBM多形性胶质母细胞瘤Glioma GBMLGG(神经)胶质瘤Head and Neck squamous cellcarcinomaHNSC头颈鳞状细胞癌Kidney Chromophobe KICH肾嫌色细胞癌Pan-kidney cohort(KICH+KIRC+KIRP)KIPANKidney renal clear cell carcinoma KIRC肾透明细胞癌Kidney renal papillary cellcarcinomaKIRP肾乳头状细胞癌Acute Myeloid Leukemia LAML急性髓系白血病Brain Lower Grade Glioma LGG脑低级别胶质瘤Liver hepatocellular carcinoma LIHC肝细胞癌Lung adenocarcinoma LUAD肺腺癌Lung squamous cell carcinoma LUSC肺鳞状细胞癌Mesothelioma MESO间皮瘤Ovarian serous cystadenocarcinoma OV卵巢浆液性囊腺癌Pancreatic adenocarcinoma PAAD胰腺癌Pheochromocytoma and Paraganglioma PCPG嗜铬细胞瘤和副神经节瘤Prostate adenocarcinoma PRAD前列腺癌Rectum adenocarcinoma READ直肠癌Sarcoma SARC肉瘤,恶性毒瘤Skin Cutaneous Melanoma SKCM皮肤黑色素瘤Stomach adenocarcinoma STAD胃癌Stomach and EsophagealcarcinomaSTES胃与食道癌Testicular Germ Cell Tumors TGCT睾丸生殖细胞瘤Thyroid carcinoma [ˈθaɪˌrɔɪd ˌkɑ:siˈnəumə]THCA甲状腺癌Thymoma [θaɪ'məʊmə]THYM胸腺癌Uterine Corpus Endometrial Carcinoma UCES子宫体子宫内膜癌Uterine Carcinosarcoma UCS子宫癌肉瘤Uveal Melanoma [ˌmeləˈnəʊmə]UVM葡萄膜黑色素瘤。
超声引导下微波消融联合贝伐珠单抗治疗晚期结肠癌伴肝转移的临床价值

·临床研究·超声引导下微波消融联合贝伐珠单抗治疗晚期结肠癌伴肝转移的临床价值韩小军袁理郭道宁摘要目的探讨超声引导下微波消融联合贝伐珠单抗治疗晚期结肠癌伴肝转移的临床应用价值。
方法选取在我院就诊的102例晚期结肠癌伴肝转移患者,按随机数字表法分为观察组和对照组各51例,对照组采用贝伐珠单抗联合常规化疗治疗,观察组在此基础上采用超声引导下微波消融治疗;比较两组患者治疗后疗效、免疫功能、不良反应及预后情况。
结果治疗后,观察组客观缓解率(ORR)、疾病控制率(DCR)均高于对照组(均P<0.05);两组CD3+、CD4+、CD8+均较治疗前下降,且观察组CD3+、CD4+、CD4+/CD8+均高于对照组,CD8+低于对照组,差异均有统计学意义(均P<0.05)。
治疗后,两组胃肠道反应、食欲减退、疲劳乏力等不良反应比较差异均无统计学意义;观察组累积无复发生存率及累积总生存率分别为78.77%、57.45%,均高于对照组(49.32%、34.23%),差异均有统计学意义(χ2=10.086、4.536,P=0.001、0.033)。
结论超声引导下微波消融联合贝伐珠单抗能提高晚期结肠癌伴肝转移患者的治疗效果,缓解免疫功能抑制,改善生存状况,具有较好的临床应用价值。
关键词超声引导;微波消融;结肠癌,晚期;肝转移;贝伐珠单抗[中图法分类号]R445.1[文献标识码]AClinical value of ultrasound-guided microwave ablation combined withbevacizumab in the treatment of advanced colonadenocarcinoma with liver metastasisHAN Xiaojun,YUAN Li,GUO DaoningDepartment of Ultrasound Medicine,Mianyang Hospital Affiliated to School of Medicine,University of Electronic Science andTechnology of China,Sichuan621000,ChinaABSTRACT Objective To explore the application clinical value of ultrasound-guided microwave ablation combined with bevacizumab in the treatment of advanced colon adenocarcinoma(COAD)with liver metastasis.Methods A total of102 patients with advanced COAD with liver metastasis treated in our hospital were selected,and divided into the observation group and the control group by random number table method,with51cases in each group.The control group was treated with bevacizumab combined with conventional chemotherapy.On this basis,the observation group was treated with ultrasound-guided microwave thermal ablation.The curative effect,immune function,adverse reactions and prognosis after treatment of the two groups were compared.Results After treatment,the objective remission rate(ORR)and disease control rate(DCR)in the observation group were higher than those in the control group(both P<0.05).After treatment,the CD3+,CD4+and CD4/CD8+in the observation group were higher than those in the control group,and CD8+was lower than that in the control group,the differences were statistically significant(all P<0.05).After treatment,there were no statistically significant difference in the incidence rates of adverse reactions such as gastrointestinal reactions,loss of appetite and fatigue between the two groups.The cumulative recurrence-free survival rate and cumulative overall survival rate in observation group were78.77%and57.45% respectively,which were significantly higher than those in control group(49.32%and34.23%),the differences were statistically significant(χ2=10.086,4.536,P=0.001,0.033).Conclusion Ultrasound-guided microwave ablation combined with作者单位:621000四川省绵阳市,电子科技大学医学院附属绵阳医院绵阳市中心医院超声医学科(韩小军、郭道宁),肿瘤科(袁理)通讯作者:郭道宁,Email:******************结肠癌是常见的消化道肿瘤,近年来其发病率和死亡率均逐渐升高。
超声造影剂Sonazoid(示卓安)用于肝脏疾病进展
Application progresses of ultrasound contrast agentSonazoid in liver diseasesZHANG Zheyuan, ZHANG Huabin, BAI Zhiyong*(Department of Ultrasound, Beijing Tsinghua Changgung Hospital, School ofClinical Medicine, Tsinghua University, Beijing 102218, China)[Abstract]With the rapid development of contrast-enhanced ultrasound (CEUS),Sonazoid,a new generation of ultrasound microbubbles contrast agent came into being.The unique Kupffer phase of Sonazoid could greatly prolong the intrahepatic developing time,hence providing more valuable information for diagnosis,treatment and follow-up of liver diseases. The progresses of Sonazoid applicated in liver diseases were reviewed in this article.[Keywords]liver; contrast media; ultrasonographyDOI:10.13929/j.issn.1672-8475.2024.02.010超声造影剂Sonazoid(示卓安)用于肝脏疾病进展张哲元,张华斌,白志勇*(清华大学附属北京清华长庚医院超声科清华大学临床医学院,北京 102218)[摘要]随着超声造影技术迅速发展,新一代超声微泡造影剂——Sonazoid(示卓安)应运而生,其特有的Kupffer相可极大地延长肝内显影时间,为诊断、治疗及随访肝脏疾病提供更多有价值的信息。
挑战杯历届全国特等奖、一等奖作品
国家历届挑战杯特等奖、一等奖作品第一届“挑战杯”全国大学生课外学术科技作品竞赛由清华大学于1989年承办:清华大学摘得“挑战杯”一等奖获奖名单如下:北京大学刘闯在地理信息系统中土地评价模型的建模研究清华大学陈邕涛等中华学习机CAI软件开发工具清华大学吴丹策等电脑照相及微机图像处理系统清华大学金龙文等竹草木漂白系列新工艺的研究华中理工大学吴敏等建筑方案“将居民安置在发种种的小镇中”新疆石河子医学院王惠民门脉系的内分泌学意义第二届“挑战杯”全国大学生课外学术科技作品竞赛由浙江大学于1991年承办:上海交通大学摘得“挑战杯”一等奖获奖名单如下:浙江大学微机遥感图像显示操作及处理系统郑州大学方兴未艾福利企业国防科技大学Hyperview(v1.01)系统北方交通大学铁道部及各地区财务基准收益率的测定上海交通大学光纤中自然聚焦光场的环形结构上海医科大学他莫昔芬枸橡酸新工艺的研究及其原理的讨论上海交通大学农村民居建筑调研华中理工大学微量泄漏检测仪北京航天航空大学简繁五笔汉字系统及其为通道汉卡四川成都电子科技大学通信母板自动测试系统第三届“挑战杯”全国大学生课外学术科技作品竞赛由上海交通大学于1993年承办:北京大学获得“挑战杯”一等奖获奖名单如下:北京大学基于具有更佳频率分辨率的正交子波变换及自适应VQ技术的图像压缩北京大学危机与出路.....从九二深圳股市看中国B股清华大学铁基合金薄膜中铁原子磁矩的反常增大等作品获奖东北大学超级电子档案系统吉林大学镧系离子荧光探针探测天花粉蛋白结构和分子间能量传递武汉大学信安-I型计算机网络信息保护系统浙江大学PLT陶瓷期间合金电极成型新技术四川师范大学四川西部蝶类资源调查天津财经学院建立会计逻辑学体系的构想北方交通大学多渠道多方式利用外资发展我国的铁路的探讨中国科技大学本原矩阵指数的一个猜想证明上海交通大学浦东开发区环境调查及综合防治上海医科大学Z曲线显示和分析DNA系列的直观工具南京理工大学激光全息场再现图像的离子自动检测华东理工大学化学气相淀积反应器中超细粒子形成过程研究及产物形态控制华中理工大学将城市引入农村,农村引入城市-繁忙江南水乡的僻静水上花园齐齐哈尔工学院黑龙江省甜菜糖业产品结构调整战略研究报告北京航空航天大学空中机器人系统北京航空航天大学智能化电力电容在线检测仪第四届“挑战杯”全国大学生课外学术科技作品竞赛由武汉大学于1995年承办:复旦大学摘得“挑战杯”一等奖获奖名单如下:复旦大学载能束合成新型共价氮化碳超硬材料研究河北大学BaZrXTil-03固溶体的合成,结构与物性武汉大学高性能镍/金属氢化物电池和锂离子蓄电池暨南大学物体三维形貌测试技术的研究等作品获奖北京大学物体三维形貌测试技术的研究云南大学村落文化贫困地区农村妇女生育健康服务模式——武定县中山大学《劳动法》与外来工的权益保障北京大学光WDM(波分复用)中的激光波长控制清华大学高速中西文激光打印/照排控制器北京师范大学论教师的教学效能感南京理工大学走出困境再创辉煌——重庆军工企业走上发展之路的启示北京科技大学双拇指型多指手大连理工大学大学物理实验CAI教学软件包华中理式大学新型宜人化计算机辅助设计绘图系统——开目CAD华北师范大学松树花粉的培养和它萌发时营养万分的变化吉林工业大学梁的大挠度强迫振动的非线性响应的分析的新方法苏州丝绸工学院真丝新村料的研制及产品开发北京航天航空大学遥控多用途空中飞行平台第五届“挑战杯”全国大学生课外学术科技作品竞赛由南京理工大学于1997年承办:清华大学摘得“挑战杯”一等奖获奖名单清华大学《十字路口看乡企》——中国农村乡镇企业转制问题调查报告清华大学蛋白质去折叠与折叠机制的研究清华大学基于界面设计的多层膜技术获得新型合金清华大学文本无关的说话人语音语音识别系统北京大学两家名油企业生活后勤体制变革北京大学股市中操纵市场行为及防范的法律对策北京大学 Runge—lenz矢量与升降算子武汉大学武汉市再就业工程调研报告南京理工大学小波变换中的视觉门限模型和图像的层次分割优生权编码复旦大学通用工件识别系统生成工具VisionExport南京大学水煤奖添加剂NDF上海交通大学柔体机器人(组件)云南大学边疆民族地区生态环境变迁与脱贫致富——云南省怒江傈族自治州经济开发新模式研究北京航空航天大学三翼面微型无人驾驶验证机国科学技术大学酶反应的理论研究——方法及在葡萄糖异构酶中的应用四川联合大学利用红矾母液和铬酐下脚料生产蒙囿吸收铬鞣粉剂石油大学河南西峡恐龙蛋化石层及恐龙绝灭原因初探中国政法大学青少年创造能力培养和知识产权保护教育调查报告吉林工业大学轿车车身焊装用微机控制自动螺柱焊机第六届“挑战杯”全国大学生课外学术科技作品竞赛由重庆大学于1999年承办:复旦大学获得“挑战杯”一、二等奖获奖名单北京航空航天大学鱼类运动仿生研究及其柔体舰艇模型东北大学微型足球机器人系统江苏理工大学高性能铝合金材料的应用研究复旦大学指间区纹的进化和遗传南京大学体内可降解吸收医用高分子材料及其制品大连海事大学椭圆波导中的场中国科学技术大学关于α和β环糊精与苯衍生物之间的包含驱动力及包合结构的新模型上海交通大学面向软件无线电的数字发射机(激励器部分)东南大学中文个人数字助理(ASICPDA-2000)北方交通大学大规模发展交通仿真及公交智能调度指挥平台开发重庆大学 AV-100S型双面表格自动阅读机苏州大学真丝新材料-差别化柞桑弹力真丝的研制与产品开发北京大学从法院状告新闻媒体谈起——一起名誉侵权官司引发的思考复旦大学适应环境变化,构建新型企业——上海国有外贸企业改革调查华东师范大学师范大学生专业思想状况调查哈尔滨理工大学侵华日军731部队罪证网站国立华侨大学基于可持续发展的水资源定价试探华中理工大学基于针式传感器的多功能扫描探针显微装置南京大学电动自行车综合测试仪吉林工学院轿车深冲件应用国产冷轧IF钢板研究江苏理工大学 4LGT-130型稻麦联合收割机的研制重庆大学虚拟式小波变换信号分析仪重庆医科大学手握(傻瓜)式纯水检测仪华东理工大学清洁化生产取代芳胺磺酸中国科学技术大学超支化聚(胺-酯)的合成及其光固化性能研究吉林工学院汽车内饰件粘合剂的研制同济大学茶多酚提取新工艺及其系列产品开发无锡轻工大学 UASB-CAAS系统处理高浓度有机废水的工程技术无锡轻工大学维生素在光滑球拟酵母发酵生产丙铜酸中的关键作用广西师范大学湘西洛塔植物区系及开发利用研究重庆大学心肌收缩能力的一种无伤性检测和评估方法研究山西大学 Hie Senberg 方程的换算表示复旦大学国内首家微波硫灯的研制桂林工学院 NETWARE高级编程接口及未公开的核心技术武汉交通科技大学二维条码自动识别应用技术研究西安电子科技大学高速分组无线网长沙铁道学院空调客车状态参数集中管理系统成都电子科技大学校园网上的学生管理信息系统中国科学技术大学基于中文实时语音技术的有声电子系统北京理工大学《圣林3.0》实时三维图象引擎武汉大学系列安全容错智能卡应用系统重庆邮电学院多链路中国NO.7的信令分析仪华中理工大学基于LAN/INTERNET的H.323视频会议系统西安电子科技大学自控光阀及其在防弧光领域的应用清华大学细菌基因快速鉴测仪中国地质大学(武汉)油气资源储量评价系统华东理工大学无规共聚高分子相平衡的研究武汉大学新型固相微萃取探针复旦大学智能酒气电子鼻山东工业大学弹性管束热交换器的结构、动态特性及自动控制过程仿真重庆建筑大学新型高效掺合料北京大学社区的构成清华大学走近21世纪的中国环境技术中国人民大学面对挑战,中国对外经济的立足点北京师范大学困境与出路——城镇企业下岗职工再就业状况调查北京师范大学面向21世纪发展远程教育——关于中国远程教育中若干问题的调查与思考中国政法大学中国农民法律意识现状探讨西南政法大学典权的过程分析及性质研究山西大学刚玉之路河海大学江苏省水资源可持结发展模式探讨中国药科大学我国药品价格现状分析及管理对策的研究杭州商学院论国有企业激励机制湖南财经学院买方市场:高教与经济增长—发展高教是推动经济增长的重要途径华中农业大学农业科技推广中的几点思考第七届“挑战杯”全国大学生课外学术科技作品竞赛由西安交通大学于2001年承办:复旦大学和东南大学获得“挑战杯”特等奖北京大学锆基固体电解质纳米晶薄膜材料的制备及微结构与电学性质研究清华大学结构光三维扫描仪北京航空航天大学数字立体电视其计算机成像系统南开大学发光锌纳米分子复旦大学上海越族后裔与台湾高山族的渊源华东师范大学师范生对教育类课程看法的调查报告东南大学 OSC2001微型掌上数字存储示波器东南大学南京市流动民工现状调查山东大学换热器动态仿真及智能控制系统山东大学紫外倍频晶体K2AL2B207的生长技术汕头大学 LCD生产过程的基板自动对位贴合及ITO、SPACER自动检测系统电子科技大学考虑交易费用与风险情况下移动平均交易规则的检验四川大学论对抽象行政行为的司法监督重庆大学“移民者的乐园”——三峡库区“棚户现象”调查研究与城市(镇)迁建、移民问题思考渝州大学绿色贸易壁垒及重庆之应对贵阳中医学院《针穴II》虚拟三维教学系统西安交通大学金纳米球壳微粒的空腔谐振吸收特性)西安交通大学一种适用于小C臂X光机的数字成像系统一等奖北京大学中国高龄老人健康状况和健康预期寿命研究北京航空航天大学环形翼飞机北京航空航天大学弹射座椅地面综合测试仪及其嵌入式系统北京航空航天大学多机器鱼协调及机器鱼的机动性研究北京科技大学喷丝板自动检测系统北京科技大学灵丘贫锰银矿综合利用技术研究北京理工大学哈勃常数的实验估计北京理工大学发动机润滑系统仿真软件包北京师范大学教师反馈、学生的归因模式与学生学业成绩关系的研究:一项行动研究及其对学校心理健康教育的启示中国人民大学真茵寡聚糖诱导子诱导悬浮培养红豆杉细胞的信号转导途径及其过程模型的研究天津理工学院缔合色心型X线影像板河北大学陆马峰的发育与筑巢行为的研究河北科技大学 L-抗坏血酸-2-三聚磷酸酯的合成研究华北电力大学民事举证责任倒置问题探析大连海事大学船舶运动控制试验平台大连理工大学冰柜监控管理系统大连理工大学单金属、双金属催化剂表面CO氧化反应的模拟模型大连理工大学医学层析图象三维几何重建与可视化仿真东北大学般若企业互联网络综合应用平台吉林工学院溶液法银纳米微粉的光化学制备哈尔滨理工大学地下管线定位仪东华大学中国绿色服装发展探究复旦大学转动基板的激光测温复旦大学知识产权新课题——基因专利复旦大学以企业信息化迎接B2B挑战华东师范大学 GSEEK码路天使——中西文著者号码自动生成系统上海财经大学高级管理层激励与上市公司经营绩效上海交通大学全光通信系统仿真软件上海师范大学如何在中国农村普及信息技术教育同济大学多高层建筑结构设计系统(简称MTS)东南大学均压型行波形超声波电机苏州大学真丝调拒水拒油防污多功能整理新技术研究及产品开发苏州大学非接触式高精度数字图像面积测量仪苏州大学激发型抗人CD40单克隆抗体的研制及产品开发扬州大学 Xa21基因导入水稻广亲和恢复系SWR20提高白叶枯病抗性中国药科大学脆壁克鲁维酵母菌乳糖酶的开发与应用浙江大学基于综合推理的集成化智能书法创作合肥工业大学关于安徽农村税费改革的调查和建议中国科学技术大学语音合成芯片郑州工程学院王涛河南省高校大学生创新能力现状调查与对策研究郑州工程学院袁少勇在WTO框架下:中国粮食流通体制改革研究华中师范大学我国城市社区的阶层化趋势研究武汉大学用人市场对大学毕业生质量评价的社会学分析武汉理工大学谈广义M集的演化及其在图形防伪中的应用中国地质大学(武汉) 全球古大陆再造软件开发研究国防科学技术大学 Windows变速器国防科学技术大学数字水印新技术华南农业大学车八岭保护区及其邻近地区的木兰科植物种群及其群落特征的研究中山大学中国南沙群岛海域浮游原生动物生物多样性研究中山大学珠江三角洲富裕农村主观剩余劳动力问题研究华南热带农业学院蝗虫霉菌的培养及致病性初步实验西南石油学院油藏压裂模拟设计与分析软件系统重庆大学可穿戴式计算机——Netdaily云南大学便携式高精度数字燃油流量计云南大学传统法文化的断裂与现代法治的真空——少数民族农村法治秩序建构路径选择的社区个案研究长安大学 The Problems and the Solutions on Ecological Architecture in Developing Countries西安电子科技大学单片机模糊控制软件仿真和生成平台西安理工大学 Sn02:F透明电热膜加热管兰州大学纳米微阵电极组装体系的制备和初步研究宁夏大学宁夏移民区可持续发展模式研究宁夏大学历史上固原地区人地关系的两次转型对生态建设的启示新疆大学维-汉-英三向背单词系统、电脑词典第八届“挑战杯”全国大学生课外学术科技作品竞赛由华南理工大学于2003年承办:清华大学获得“挑战杯”复旦大学获得挑战杯永久纪念碑一座一等奖获奖名单北京大学司法判决书中“双高”现象并存的另一种解释进路北京大学贫困学生怎么上大学?——中国高校学生贷款运行机制案例分析及其国际比较北京航空航天大学仿生飞翼布局飞机北京航空航天大学纳米光催化空气消毒净化器清华大学北京市流动儿童受教育状况及心理健康现状调查报告中国地质大学(北京)大学生创新精神和实践能力培养的调查研究——团体创新模式分析中国农业大学 AISCR-1-100微机控制全自动智能除雪机器人中国人民大学资本市场融资条件与产品市场竞争双重约束下的中国上市公司融资行为研究北京城市学院北京市乞丐现状调查报告天津大学桩基承台前方设挡土结构的大型码头结构河北科技师范学院杏树新害虫---JT虫生物学特性及无公害防治研究山西财经大学货币需求中的认知因素分析大连理工大学基于元胞自动机和Penna模型的生态系统模拟模型吉林大学国有经济控制力及控制方式新探吉林大学兽疫链球菌突变株产生的透明质酸的纯化及表征北华大学气动蠕动式缆索机器人哈尔滨医科大学中药复方抗心律失常药物筛选平台的建立复旦大学手晃电子显示棒上海财经大学城市轨道交通投资对周边地价变动影响的实证分析上海交通大学新型水葫芦打捞船上海交通大学基于 Inter PXA250的无线个人客户端的开发(wireless personal client)同济大学轨道交通运输组织仿真系统开发同济大学城市之桥—上海世博会人行过江“花”桥的结构概念设计同济大学四轮独立驱动燃料电池微型汽车东南大学通用手持概念仪器东南大学江苏省企业电子商务应用调查研究报告南京大学一种新型的磁力吸盘南京大学他们怎样生存——三峡移民迁前生存状况调查南京工业大学绿色紧凑的冷冻式空气干燥机南京理工大学鱼类旋涡射流推进理论及其应用南京师范大学稀土有机配合物生态转光剂的制备南京师范大学推进乡镇机构改革的对策研究——苏南、苏北若干典型乡镇机构改革的比较分析南京邮电学院基于动态路由控制的高性能IP宽带接入网关中国矿业大学花生收获机华东船舶工业学院仿生波动推进器绍兴文理学院组织的镶嵌、链接和整合——中国轻纺城地方商会个案分析浙江工业大学“AH-Assemble”汇编语言集成开发平台浙江师范大学村委会选举中乡镇政府的角色转换——以浙江省昌镇村委会选举为个案中国科学技术大学σ键超共轭作用在丙烯旋转能垒中的重要性中国科学技术大学最小超对称标准模型下的R宇称破坏机制对CERN LHC上轻子对产生过程的影响中国科学技术大学 Bcl-rambo β的发现和功能研究福建农林大学甘蔗近缘属植物斑茅的杂交利用与抗逆性评价福州大学基于评价方法属性层次的组合评价研究华侨大学三维自然纹理的反求设计与制造厦门大学从“三农”问题透视乡镇政权——以福建省枫亭镇和大济镇为例山东理工大学竹红菌甲素--一种新型抗生素的抑菌作用研究郑州工程学院大学生诚信缺失徂源及对策——转型期大学生信用行为分析湖北大学论诚信的劣变与对教育理性的质问----关于当代大学生诚信状况的分析以及对当代教育的反思华中科技大学北京、武汉高校人才培养与学生素质状况调查报告武汉大学绿色铅酸蓄电池及其生产工艺武汉化工学院水性聚酯树脂的合成及其涂料研制中国地质大学(武汉)求解动态TSP问题的新型演化算法国防科技大学新概念路标系统与无人驾驶汽车模型湖南大学 RSY-1肉类水分快速测定仪湖南大学入世过渡期:银行不良资产处置模式的比较分析与路径选择湖南师范大学传统文化与党风廉政建设湖南师范大学走向权利时代的民工权益——来自深圳民工的调查中南大学三峡移民的文化差异与文化融合——以湖南岳阳地区新市、杨林两地三峡移民为样本分析的调查报告中南大学基于等离子体聚合膜技术的压电免疫传感器的研究及其在急性白血病免疫分型中的应用广州大学岭南城市广场与公园热环境研究华南理工大学新型高分子点阵发光显示屏华南农业大学园艺植物自然分类系统及其汉拉英名称对照广东商学院 21世纪中国人口老龄化与银色产业开发四川大学通过分子复合实现聚乙烯醇的吹塑成膜西南石油学院现代试井分析技术及软件系统第三军医大学以纳米金为报告系统的病原体快速检测基因芯片第三军医大学抑制胆固醇合成对乳腺癌细胞离子跨膜流动、细胞骨架形成及细胞通讯功能影响的研究重庆工学院一个非常值得关注的“三农”问题——重庆市农村养老问题调查研究云南师范大学微波加热技术在催化化学反应中的应用长安大学环保型野生植物杀虫剂的研究西安科技大学基于虚拟仪器技术的多种机械量测试系统西安交通大学透平叶片型线设计及优化软件西安交通大学金纳米棒状微粒的吸收光谱宁夏大学数字显微镜模拟目镜及病理远程诊断系统新疆大学新疆家蚕抗菌肽基因工程产品的开发与应用第九届“挑战杯”全国大学生课外学术科技作品竞赛由复旦大学于2005年承办:复旦大学获得“挑战杯”复旦大学以总分420分的最高分夺得第九届“挑战杯”;北京大学、中国矿业大学、南京大学等20所高校捧得“优胜杯”;清华大学由于累计3次捧杯,获得“挑战杯‘永久纪念杯’”。
惠威HR70遥控器使用说明书
HR070 Series Remote Control Programming Guide
6. Repeat steps 1 to 5 for the other components you want to control. For future reference, write down each working component code below:
HR Series Remote Control Programming
Assigned Push-button Component Program Code
TV
CBL
SAT
AUX
DVR
Push-buttons available for Programming
Flashes during Programming
4
Used to activate Programming Mode
with the most popular code first. If the component
responds, go to step 7.
6. If the component does not respond, press LEVEL+
Push-button and the Remote Control will test
The HR70 Series Remote Controls have stored in permanent memory the necessary information to send the correct commands to the component to be controlled. By entering a five digit numeric code the commands for controlling the component is activated.
DUAL MODE ULTRASOUND TRANSDUCER (DMUT) SYSTEM FOR
专利名称:DUAL MODE ULTRASOUND TRANSDUCER (DMUT) SYSTEM FOR CONTROLLINGDELIVERY OF ULTRASOUND THERAPY发明人:EBBINI, Emad S.,CASPER, Andrew J.,LIU,Dalong,BALLARD, John R.申请号:EP18165565.5申请日:20110609公开号:EP3406299B1公开日:20210804专利内容由知识产权出版社提供摘要:A dual-mode ultrasound system provides real-time imaging and therapy delivery using the same transducer elements of a transducer array. The system may use a multichannel driver to drive the elements of the array. The system uses a real-time monitoring and feedback image control of the therapy based on imaging data acquired using the dual-mode ultrasound array (DMUA) of transducer elements. Further, for example, multi-modal coded excitation may be used in both imaging and therapy modes. Still further, for example, adaptive, real-time refocusing for improved imaging and therapy can be achieved using, for example, array directivity vectors obtained from DMUA pulse-echo data.申请人:Regents of the University of Minnesota代理机构:Latzel, Klaus更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A3-D Ultrasound Robotic Prostate Brachytherapy System With Prostate Motion Tracking Nikolai Hungr,Michael Baumann,Jean-Alexandre Long,and Jocelyne Troccaz,Member,IEEEAbstract—This paper describes a new3-D ultrasound robotic prostate brachytherapy system.It uses a stationary3-D ultrasound probe rigidlyfixed to a robotic needle insertion mechanism.The novelty of the system is its ability to track prostate motion intra-operatively to allow the dose planning and needle trajectories or depths to be adapted to take into account these motions.Prostate tracking is done using a fast3-D ultrasound registration algorithm previously validated for biopsy guidance.The7-degree-of-freedom (7-DOF)robot and ultrasound probe are calibrated together with an accuracy of0.9mm,allowing the needles to be precisely inserted to the seed targets chosen in the reference ultrasound image.Exper-iments were conducted on mobile,deformable synthetic prostate phantoms using a prototype laboratory system.Results showed that,with prostate motions of up to7mm,the system was able to reach the chosen targets with less than2-mm accuracy in the nee-dle insertion direction.This measured accuracy included extrinsic measurement errors of up to1.1mm.A preliminary cadaver fea-sibility study was also described in preparation for more realistic experimentation of the system.Index Terms—Mechanism design,medical robots and sys-tems,prostate motion tracking,prostate registration,robotic brachytherapy,3-D ultrasound guidance.I.I NTRODUCTIONT HE prostate gland is one of the most commonly cancer-affected male organs in western developed countries.In 2012,241740new cases of prostate cancer and28170deaths were estimated in the U.S.[1],while in2011,71000new cases and8700deaths were estimated in France[2],making it the third most common cause of cancer death in men.Manuscript received March16,2012;accepted May29,2012.Date of publication June25,2012;date of current version December3,2012.This paper was recommended for publication by Associate Editor E.Guglielmelli and Editor W.K.Chung upon evaluation of the reviewers’comments.This work was supported by the Agence Nationale de la Recherche under the“Technolo-gies pour la Sant´e”program(coordinated by Koelis SAS,La Tronche,France). The work of J.Troccaz was supported by an Institut National de la Sant´e et de la Recherche M´e dicale Contrats Hospitaliers de Recherche Translationnelle Grant obtained in2010.N.Hungr is with the Techniques de l’Ing´e nierie M´e dicale et de la Com-plexit´e—Informatique,Math´e matiques et Applications de Grenoble Laboratory, 38706Grenoble,France(e-mail:Nikolai.Hungr@imag.fr).M.Baumann was with the Techniques de l’Ing´e nierie M´e dicale et de la Com-plexit´e—Informatique,Math´e matiques et Applications de Grenoble Laboratory, 38706Grenoble,France.He is now with Koelis SAS,38700La Tronche,France (e-mail:baumann@).J.-A.Long and J.Troccaz are with the Centre Hospitalier Universitaire de Grenoble,38700Grenoble,France,and also with the Techniques de l’Ing´e nierie M´e dicale et de la Complexit´e—Informatique,Math´e matiques et Applica-tions de Grenoble Laboratory,38706Grenoble,France(e-mail:JALong@ chu-grenoble.fr;Jocelyne.Troccaz@imag.fr).Color versions of one or more of thefigures in this paper are available online at .Digital Object Identifier10.1109/TRO.2012.2203051Fig.1.Conventional brachytherapy setup in the OR.A number of treatment options are available,depending ona patient’s age,medical history,and anatomy,as well as onthe stage of the cancer.The primary treatment options in-clude active surveillance without treatment,radical prostatec-tomy,chemotherapy,external beam radiation therapy(EBRT),and,more recently,less invasive treatments such as cryotherapy,high-intensity focused ultrasound(US),and internal radiationtherapy,namely brachytherapy.The latter method has,in recentyears,increased in popularity among patients with early stagesof cancer due to its low morbidity,short hospitalization,andrelatively few side effects.A.Permanent Low-Dose Rate Prostate BrachytherapyPermanent low-dose rate(LDR)prostate brachytherapy is atechnique that involves the localized irradiation of the prostateby the permanent insertion of about100tiny radioactiveseeds.The conventional procedure introduces the seeds intothe prostate according to a preoperative dose distribution plan,by means of hollow needles inserted through the perineum ofthe patient in the lithotomy position.The number and distribu-tion of seeds are determined to satisfy given dose constraints(inthe prostate,rectum,and urethra).A template,as seen in Fig.1,is used to insert the needles along a grid of horizontal holes,the depth of each needle being adjusted visually using2-D tran-srectal ultrasound(TRUS)guidance.In our partner hospital,thetechnique takes between2and4h under full anesthesia,de-pending on the complexity of each case.Its primary benefitsover other popular techniques,such as radical prostatectomyand EBRT,are its short hospitalization period(1to2days),aswell as its potential to provide intense localized therapy withinthe prostate,with limited morbidity and side effects.1552-3098/$31.00©2012IEEERecent discussions,which are motivated by the appearance of new studies showing a minimal death rate for early stage prostate cancer patients[3],[4],have been provoked on whether treat-ments,including LDR prostate brachytherapy,are sufficiently beneficial to outweigh the side effects and cost of the procedures. An important argument has been that the majority of the reported side effects can be directly related to the quality and precision of the treatment delivered.The success of a brachytherapy proce-dure(i.e.,the complete destruction of the cancer,with minimal side effects)is reliant on dose conformity,i.e.,the uniform dis-tribution of the radioactive dose throughout the entire volume of the prostate(or the precise focalized application of the dose in the case of focal therapy),without overdosage and without affecting adjoining organs such as the bladder,rectum,seminal vesicles,or urethra.The procedure is,therefore,heavily reliant on the ability of the clinicians and physicists in reproducing the preplanned dosimetry within the prostate.Multiple limitations to the conventional manual brachyther-apy technique make dose conformity a difficult task.The pri-mary challenge lies in the mobility of the prostate and surround-ing soft tissues during the intervention.Both the insertion of the needles and the movement of the TRUS probe cause signifi-cant motion and deformation of the prostate[5],[6].Since the dosimetry plan is typically based on the manual segmentation of only two sets of US images taken before the insertion of the nee-dles(i.e.,nonadaptive planning),the resultant accuracy of the seed placement is difficult to verify in real time.This accuracy is additionally affected by a number of other factors,including the random migration of the seeds upon their release within the prostate,theflexion of the needles upon insertion into the tissue, and prostatic edema during the intervention.Another important limitation to the technique is that needle insertion is restricted to the horizontal axes defined by the needle template.Not only is needle placement limited to a grid of5-mm spacing,but perhaps more importantly,this parallel grid system does not allow access behind the pubic arch in the relatively frequent case of the latter eclipsing parts of the prostate[7].These issues,among others, result in a lengthy and unavoidably repetitive procedure that relies heavily on the experience of the clinicians and physicists and that limits patient eligibility.B.Robotics in Low-Dose Rate Prostate Brachytherapy Research in thefield has,in recent years,turned toward using robotics and computer assistance with the primary goal of im-proving dose conformity.Numerous research teams worldwide have introduced novel conceptual advances toward the improve-ment of seed placement within the prostate.These advances are summarized in the columns of Table I.Robotics has introduced the possibility of positioning the needles throughout the prostate,without the grid constraints imposed by the template used in the conventional technique. Needle inclination is also possible,allowing reaching behind the pubic arch and,thus,potentially expanding procedure eligibility to patients with larger prostates.Robotics can also be used to mitigate prostate motion and nee-dle bending.During needle insertion,needle–tissue interactions cause significant motion of the prostate as well as needleflexion, making it difficult to reach the preplanned seed locations with accuracy.This is managed in the conventional procedure by vi-sually adjusting the depth of each needle based on the streaming 2-D TRUS images or by reinserting the needle in case of large transverse errors.Due to significant image artifacts surrounding the needle,especially when multiple needles have already been inserted,this can often be more of an estimate than a precise adjustment.A mechanical approach to reduce prostate motion, which is made available by the use of robotics,has been to introduce controlled needle insertion speed,coupled with nee-dle rotation during insertion.This has been shown to decrease puncture force and deformation as well as needle deflection in phantoms[28],[29].Another proposed solution has been the use of hooked stabilizing needles placed into the prostate[30], with,however,the potential of causing increased bleeding and edema.The other approach is motion management,rather than mit-igation.By detecting the needles and/or seeds in the TRUS images[31]–[33],precise information can be provided to the clinician to help make informed decisions on how to proceed (whether this be needle repositioning or modification of the planning).This detection also allows for automatic update of the dosimetry for postoperative evaluation.These techniques,how-ever,typically do not locate the needles and seeds with respect to the prostate and when used alone cannot provide clinically relevant information on the dose distribution inside the gland. As in the manual technique,these detection methods are also often hampered by image artifacts,making them challenging in a clinical setting.More recently,methods have been proposed to semiautomat-ically or fully automatically track the prostate itself in the US images[34],[35],[39].One of these methods[39],which was developed previously by our group,will be described further in this paper,showing its ability to track the prostate in near real time and,hence,accurately manage prostate motion.To date,all US-based robotic and manual techniques use2-D TRUS probes.Through the use of manual or motorized step-pers,these2-D images can be reconstructed into3-D volumes, on which the aforementioned image analysis techniques can be used.In Table I,we have called this method of3-D recon-struction“2.5-D,”in order to distinguish it from3-D probes that have moving elements within the probe head itself.Tech-niques of2.5-D reconstruction require probe movement within the patient’s rectum,which results in significant motion of the prostate due to the variable pressure applied to the rectum.Some research groups have elegantly countered this problem by devel-opingfixed probe sleeves that ensure a constant pressure within the rectum(see Table I).It is unclear,however,whether these sleeves affect image quality,especially,at larger depths. Another very different area of development has been the use of intraoperative MRI or computed tomography(CT)scanners instead of US.These modalities can bring distinct information to the clinician that can be useful for more accurate anatomi-cal segmentation or even focal cancer detection.The restricted space within these imagers requires the use of robotics in order to access the patient with ease and precision.These are veryTABLE IE XISTING R OBOTIC P ROSTATE S YSTEMS AND T HEIR I NNOVATIONSinteresting but challenging initiatives that still require consider-able development in order to gain the same confidence as the well-established US techniques.C.Project Purpose and JustificationAdvances in robotic-assisted brachytherapy research have clearly shown its potential in improving on the conventional manual techniques and providing benefits to patients and clin-icians.The state of the art includes numerous creative designs for precise,efficient,and robust robotic devices whose accuracy has been primarily validated on static phantoms.However,to be clinically beneficial,systems must couple the accuracy of a robot with techniques to manage the mobility of the soft tissue prostatic environment,in order to cope with the three situations illustrated in Fig.2:1)motion and deformation caused by nee-dle insertion,2)needle bending,and 3)deformation caused by TRUS probe motion.Mechanical solutions,such as introduc-ing needle rotation,stabilizing needles,or probe sleeves can help reduce mobility but are of limited utility as they cannot completely eliminatemotion.Fig.2.Three primary sources of prostate motion and deformation during brachytherapy.(a)Needle insertion causes a translation,rotation,and deforma-tion of the prostate.(b)Needle can bend during insertion,due to needle–tissue forces.(c)TRUS probe motion can cause prostate motion and deformation.Fig.3.Hardware layout within operating room.Reference frames:P= prostate,U=US probe,R=robot.We believe,therefore,that a vital element for the clinical suc-cess of robotic brachytherapy systems is their ability to track the prostate in3-D space.In this paper,we describe a novel robotic prostate brachytherapy system with prostate motion tracking. Our computer-assisted robotic brachytherapy system is called PROSPER(for PROState transPERineal interventions)and con-sists of a robotic needle insertion device,a static3-D US probe, and a robust prostate tracking routine.The robot allows needles to be inserted throughout its continuous workspace(compared with the discretized template used in conventional brachyther-apies),including at oblique angles,and at controlled insertion velocities and rotations.Unlike other systems,the3-D TRUS probe,which is calibrated to the needle insertion robot,al-lows for the automatic adjustment of needle depths based on gland motion detection during the procedure.In addition,the 3-D probe remains stationary inside the rectum,preventing any probe-induced prostate motions.The clinical goal of the sys-tem is to improve the quality of the standard brachytherapy procedure by1)ensuring a better correspondence between seed placement and the initial planned dose distribution,2)providing a more diverse andflexible choice of seed positions in order to improve dose distribution,and3)potentially making the pro-cedure available to more patients,particularly those with larger prostates or constrained pubic bone anatomies.II.S YSTEM D ESCRIPTIONA.General LayoutThe general layout of our robotic brachytherapy system is shown in Fig.3.As in the conventional technique,the patient lies on the surgical bed in the lithotomy position.The robotic needle manipulator is rigidly connected and calibrated preoperatively to the3-D end-fire US probe.At the beginning of the operation,the robot and probe are manipulated in unison by the clinician,by means of an adjustablefixation arm(such as the commercially available CIVCO Multipurpose Workstation)attached to the surgical bed,in order to place the probe in the rectum of the patient and obtain an appropriate visualization of the prostate. The whole assembly is thenfixed and the3-D probe is able to acquire image volumes of the entire prostate without being displaced.It remains stationary for the entire procedure,unless the rectum–probe contact degrades due to patient motion,etc., in which case its position can be readjusted by the clinician.The robot adjusts its approach angle based on the orientation of the prostate gland in the US image.In analogy to the conventional stepper-based technique,the robot replaces the template in front of the perineum and the3-D probe replaces the2-D probe and stepper.B.Clinical WorkflowThe clinical workflow that we have designed for our system is illustrated in the block diagram in Fig.4.At the beginning of the procedure,a3-D US reference volume is acquired.It is regis-tered to a preoperative MRI acquisition to facilitate and improve prostate delineation[36]and initial dose planning[37].In this initial planning stage,the needle trajectories and seed positions are defined with respect to the reference prostate extracted from the US reference volume.Next,the following process takes place for each needle.The needle trajectory is computed with respect to the robot coordi-nates by means of a preoperative calibration of the US probe with respect to the robot.The robot positions the needle at its insertion point in front of the perineum and inserts the needle. In case of pubic arch interference,the needle is withdrawn,and a partial replanning is done to modify the needle trajectory in order to avoid the pubic arch,while still maintaining the dose constraints.Once the needle has been inserted to its planned position,a verification procedure is applied to check for and respond to any prostate motion or deformation caused by the insertion.The control loop used to handle prostate motion is highlighted by the gray background in Fig.4.It is important to note that in our control scheme,the dosimetry plan isfixed with respect to the mobile prostate reference frame,rather than to the stationary US probe as is the case in the conventional procedure(see frame P in Fig.3).By taking a US volume after the needle insertion,and registering it to the initial reference volume,the dosimetry plan can be deformed in conformance to the prostate’s motion and deformation.If the needle’s target has moved during insertion, wefirst check if it can still be reached following the same nee-dle trajectory.If it can be reached,the needle depth is adjusted iteratively until the clinician is satisfied with the proximity,as shown in Fig.5.Otherwise,if the clinician deems the current needle location as unacceptable,the needle is withdrawn and a partial replanning is done in order to compensate for prostate motion before reinserting the needle.This replanning can be done using the clinician’s experience to offset the needle’s in-sertion point accordingly,as is currently done in conventional brachytherapies.Once the clinician is satisfied with thefinal needle position, the seeds are inserted(with the“Mick Applicator”for instance), while progressively removing the needle.A3-D US volume may be acquired to check the position of each seed separately or globally for all the seeds of a needle.This procedure is repeated until all seeds have been distributed in the prostate.Fig.4:Block diagram illustrating the clinical workflow that we propose for our system.III.P ROTOTYPE D ESCRIPTIONA laboratory prototype was built to evaluate the system’s per-formance in a synthetic,deformable prostate phantom environ-ment.The aspect of the clinical workflow that was tested with this prototype was the gray motion-compensation loopshown Fig.5.Simplified illustration of how the prostate deforms during needle inser-tion,moving the preimplant target within the deformed prostate.The preimplant prostate shape is depicted by the dashed circle.Our system registers the preim-plant image to the postimplant image and determines the amountεby which the target has moved,allowing this to be corrected by advancing the needle further. in Fig.4,in which US–US image registration is used to de-termine the motion and deformation of the prostate in order to correct the needle insertion depth.The layout of the prototype system is shown in Fig.6(a)and consists of a robotic needle manipulator connected to a rigid table-mount stand,onto which is also rigidlyfixed the3-D US probe.A rigid stand was used rather than an adjustablefixation arm(as described in Section II-A)for manufacturing simplicity.The robot is controlled by a laptop through a serial RS-232connection,while the US probe is controlled by a US machine.A synthetic prostate phantom used during our tests can also be seen in Fig.6(a).In this section,we will describe the various components of our prototype system in detail,before moving on to a description of our tests.A.Robotic Needle ManipulatorThe prototype robotic needle manipulator used to position and insert the needle according to the procedure defined by our con-trol scheme has been described in a previous publication[38].A photograph of the prototype is shown in Fig.6(b).It consists of two primary elements:a5-degree-of-freedom(DOF)needle positioning module and a2-DOF needle insertion module.The positioning module positions the needle along the appropriate insertion axis,allowing needle inclinations in the sagittal and coronal planes.The insertion module drives the needle to a given depth and can rotate the needle during insertion,if necessary. The clinician inserts the seed manually.The prototype’s workspace is defined by105mm of horizon-tal and vertical translation in the transverse plane,90mm of translation in the cranial–caudal direction(i.e.,in the direction of the needle),and30◦of inclination in the sagittal and coro-nal planes.In comparison,a conventional brachytherapy needle template has a workspace of60mm×60mm in the trans-verse plane,with needle holes every5mm and no possibility of inclination.The needle insertion module allows for a maximum needle insertion depth of105mm along with the possibility of rotating the needle at up to12r/s.A mechanical release system that disengages the needle driver at a needle force of around20N, in case of needle–bone contact,prevents the patient from being harmed and the needle from breaking.It also allows for manualFig.6.(a)Test-bench setup showing all the components of our system(1: 3-D end-fire US probe,2:prostate phantom,3:US machine,4:needle insertion module,5:needle positioning module,6:laboratory robot-probe stand).(b)Our first robot prototype(7:vertical motors,8:horizontal motors,9:Z-translation motor,10:homing Hall sensors,11:needle disengagement mechanism,12: needle insertion motor,13:needle rotation motor,14:needle grip,15:needle, 16:needle guide/robot end-effector).retraction of the needle in case of an electronics malfunction. The needle grip shown in Fig.6(b)is manually releasable in order to rapidly plug a Mick Applicator or other type of seed dispenser onto the needle head.Details of these features can be found in[38].B.Robot SterilizationThe inclusion of robotic tools in the operating room always introduces the challenge of sterilization compatibility.Since our robot uses motors and complex moving parts(bearings,ball screws,linear rails,etc.),we are unable to place it entirely in an autoclave.Other methods of sterilization(such as hydrogen per-oxide and radiation)were discarded due to size and availability issues.Sterilization was,therefore,resolved,as shown in Fig.7.The needle guide[see Fig.6(b)]at the front of the needleinsertion Fig.7.(a)CAD model showing how the needle insertion module can be covered by a sterile plastic cap.All white parts are sterile,while all black parts are covered by a sterile drape.(b)Detail of the needle insertion arm,showing the location of the sterile bushing that separates the sterile needle from the nonsterile rotation hub.module is sterilizable and exchangeable to accommodate differ-ent diameter needles(e.g.,18G or17G).The rest of the needle guide is cleaned but not sterilized.Instead,it is covered by a sterile plastic cap that prevents any nonsterile parts from acci-dentally touching the sterile zone.The needle itself is fastened to the rotation hub by a removable,sterilizable plastic bushing that provides the interface between the sterile needle and the nonsterile elements of the robot[see Fig.7(b)].The positioning module is covered by sterile drapes,as is done with the stepper in the conventional procedure(see Fig.1).C.Ultrasound Machine and Three-Dimensional ProbeThe3-D TRUS probe is a crucial element of the PROSPER system.A3-D probe consists of a2-D array of US transducers mounted to a miniature motor hidden inside the probe head, compared with stepper-based3-D acquisition systems,which use a2-D probe mounted on a manual or automatic stepper that moves the entire probe during acquisition.Our3-D probe, once inserted into the patient’s rectum,remains stationary for all volume acquisitions,eliminating probe-induced movements of the prostate.It is also faster and allows for more precise volume acquisition.Two types of probes could be used:an axial side-fire probe or an end-fire probe,each providing certain benefits over the other.A side-fire probe would provide image views similar to those clinicians are accustomed to seeing with conventional biplane TRUS probes.In addition to acquiring3-D volumes,it could also allow for real-time2-D viewing of needles parallel to the probe axis.An end-fire probe would have to be inserted at a steeper interfaced for image acquisition with the Ultrasonix3-D probe. angle,as shown in Fig.3.This angled approach presents the ad-vantage of allowing more space for needle inclination;however, the presentation of familiarly oriented2-D slices requires more complex image reconstruction.At the time of construction of our prototype system,no side-fire probe was commercially available;therefore,an Ultrasonix 4DEC9-5end-fire probe was used and connected to an Ultra-sonix research package(RP)US machine.The10-MHz probe has128elements arranged in a convex line,allowing for145◦of coverage between end elements and106◦of sweep.The Ultra-sonix RP was chosen for its research interface that allows for full control of low-level probe parameters and image reconstruction directly on the machine.We developed a user interface to image3-D volumes with the Ultrasonix probe.The interface is shown in Fig.8.It allows the user to acquire3-D volumes and display them in a Cartesian reconstruction.The user can scroll through sagittal,transverse, and coronal views(with respect to the probe’s long axis).The speed of sound used in the reconstruction can be set,allowing for geometrically correct imaging in different mediums.The interface also allows pairs of images to be registered together. Points can be specified in the images and used as needle targets for the robot.Image registration determines the image deforma-tionfield and applies it to the point locations as well.The US interface is connected to the robot control laptop by a network cable,allowing target points to be sent directly to the robot. D.Image RegistrationThe nonrigid image registration algorithm used in the PROS-PER system was developed in our laboratory in the context of prostate biopsies for the computation of3-D maps of prostate biopsies on a reference volume in presence of motion and defor-mation;it has been described in the literature a number of times already[39]–[42].It is fully automated and solely based on the analysis of image-intensity variations,i.e.,it does not rely on the explicit identification of prostatic structures.The algorithm uses a multistep pipeline,where each step refines the registration on increasingly more complex motion models.Rigid registrationsteps are performed using the correlation coefficient as simi-larity measure.Deformation estimation is carried out using a variational approach with linear elasticity as motion constraint. Additionally,for two volumes I1and I2,the forward transfor-mation(mapping I1to I2)and the backward transformation (mapping I2to I1)are estimated simultaneously and connected via an inverse consistency constraint to improve the registration behavior in the presence of noise.A novel similarity measure that we call“shift correlation”is used for very fast yet precise US–US registrations.The registration has been validated on47 biopsy patients and786registrations using segmentedfiducials inside the prostate as ground truth for accuracy evaluation.The RMS error of the system was evaluated to0.76±0.52mm,and the time required for a single registration was about6–8s on a 2.4GHz Intel Core2standard PC.IV.C ALIBRATIONThe accuracy of the PROSPER system relies in part on the mechanical relationship between the rigidly connected robotic needle manipulator and US probe.Calibration is,therefore,an important step.Two calibrations were performed:a calibration of the robot kinematics,followed by a calibration between the 3-D US image space and the robot space.A.Robot Kinematics CalibrationThe robot kinematics was calibrated in order to improve the kinematic accuracy of the robot,initially based on the3-D CAD model of the prototype.More specifically,the robot’s Denavit–Hartenberg(DH)parameters(see the Appendix)were calibrated based on measurements of the robot’s end-effector in various poses throughout its workspace.A Polaris optical measurement system(Northern Digital Inc.,Waterloo,ON,Canada)was used to measure the poses.Although the reported accuracy of the Polaris system is not ideal(0.25mm)for the high precisions required for such a medical application,it was chosen for avail-ability and simplicity reasons and deemed sufficient for the laboratory use of thisfirst prototype.The transformations between the various reference frames used in the kinematic calibration are shown in Fig.9.Two Po-laris rigid bodies were used:one attached to the base frame of the robot,and the other to its end-effector.Note that the robot end-effector refers to the pin hole at the end of the robot,through which the needle passes,as labeled in Fig.6(b).The transfor-mations between each rigid body and the true robot base/end-effector were estimated and added to the list of unknown param-eters to solve for in the calibration routine.Forty-eight different poses were measured throughout the robot’s3-D workspace and at random horizontal and vertical inclinations,giving a system of k=48equations and14unknown robot parameters(eight DH parameters and six motor offset parameters)as follows:εk=polkx ee b−f kin k x ee b(P,q k)(1) whereεk is the error between the pose from robot base to end-effector measured by the Polaris(polkx eeb)and the pose calculatedby the robot forward kinematics(f kinkx eeb).P is the set of DH。