51步进电机使用例程
[整理]51单片机驱动步进电机电路及程序
![[整理]51单片机驱动步进电机电路及程序](https://img.taocdn.com/s3/m/f1d228db4afe04a1b071ded3.png)
51单片机驱动步进电机电路及程序时间:2007-06-26 来源: 作者: 点击:9469 字体大小:【大中小】在这里介绍一下用51单片机驱动步进电机的方法。
这款步进电机的驱动电压12V,步进角为7.5度 . 一圈360 度, 需要48 个脉冲完成!!!该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、5:黄色、6:黑色。
采用51驱动ULN2003的方法进行驱动。
ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。
;********************************************************************************* ;****************************步进电机的驱动*************************************** ; DESIGN BY BENLADN911 FOSC = 12MHz 2005.05.19;---------------------------------------------------------------------------------; 步进电机的驱动信号必须为脉冲信号!!! 转动的速度和脉冲的频率成正比!!! ; 本步进电机步进角为7.5度 . 一圈360 度, 需要48 个脉冲完成!!!;---------------------------------------------------------------------------------; A组线圈对应P2.4; B组线圈对应P2.5; C组线圈对应P2.6; D组线圈对应P2.7; 正转次序: AB组--BC组--CD组--DA组(即一个脉冲,正转7.5 度);----------------------------------------------------------------------------------;----------------------------正转--------------------------ORG 0000HLJMP MAINORG 0100HMAIN:MOV R3,#144 正转3 圈共144 脉冲START:MOV R0,#00HSTART1:MOV P2,#00HMOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START 对A 的判断,当A = 0 时则转到STARTMOV P2,ALCALL DELAYINC R0DJNZ R3,START1MOV P2,#00HLCALL DELAY1;-----------------------------反转------------------------MOV R3,#144 反转一圈共144 个脉冲START2:MOV P2,#00HMOV R0,#05START3:MOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START2MOV P2,ACALL DELAYINC R0DJNZ R3,START3MOV P2,#00HLCALL DELAY1LJMP MAINDELAY: MOV R7,#40 步进电机的转速M3: MOV R6,#248DJNZ R6,$DJNZ R7,M3RETDELAY1: MOV R4,#20 2S 延时子程序DEL2: MOV R3,#200DEL3: MOV R2,#250DJNZ R2,$DJNZ R3,DEL3DJNZ R4,DEL2RETTABLE:DB 30H,60H,0C0H,90H 正转表DB 00 正转结束DB 30H,90H,0C0H,60H 反转表DB 00 反转结束END。
关于51单片机步进电机调速的课程设计及步进电机调速程序

指导教师评定成绩:审定成绩:重庆邮电大学自动化学院计算机控制技术课程设计报告基于MCS51单片机控制系统设计单位(二级学院): xxxxx学生姓名: xxxx专业:自动化班级: xxxxx学号: xxxxxx指导教师: xxxx设计时间: 2012 年 6 月重庆邮电学院自动化学院制摘要 (3)第1章本次设计的基本要求 (4)1.1基本要求 (4)第2章方案的论证 (4)2.1 控制方式的确定 (4)2.2 驱动方式的确定 (5)2.3 驱动电路的选择 (5)2.4 基本方案的确定 (6)第3章硬件电路的设计 (7)3.1 单片机的选择 (7)3.1.1 单片机的引脚功能 (7)3.1.2 主要特性: (8)3.2 步进电机的选择 (9)3.3驱动电路的选择 (10)3.4 显示电路与键盘的选择 (11)3.5 反馈电路的选择 (13)3.5.1光电编码器原理 (13)3.5.2步进电机测速原理 (14)3.5.3闭环PID控制原理 (14)第4章算法的设计: (15)4.1步进电机控制算法 (15)4.2 步进电机转速测量算法 (15)4.3 PID 控制算法 (15)4.3.1 位置式PID的控制算法 (16)4.3.2 增量式PID的控制算法 (16)第5章实验结果 (18)第6章问题总结 (20)6.1复位电路: (20)6.2数码管驱动: (20)6.3独立键盘: (21)6.4步进电机算法整定: (21)6.5焊接电路图: (22)第7章参考文献 (23)附录一分工表 (24)附录二:系统PCB图 (25)附录三:电路原理图 (26)附录四:仿真原理图 (27)附件五:元器件封装规格 (28)附录六:源程序 (29)摘要步进电机和直流电机原理及其驱动程序控制控制模块,通过AT89C51完成步进电机和直流电机各种运行方式的控制。
实现步进电机的正反转速度控制并且显示数据。
整个系统采用模块化设计,结构简单、可靠,通过按键控制,操作方便,节省成本。
51单片机步进电机控制汇编语言程序

51单片机步进电机控制汇编语言程序;本程序是通过秒信号触发中断来实现的,要求中断程序必须在1S内执行完毕;步进电机转速控制是通过8255输入信号在每次执行中断程序内调整控制信号的循环次数来实现的CODE SEGMENTASSUME CS:CODESTART: PUSH CSPOP DS;数据段和代码段共用一个地址JMP MAINNUM DB 08H,04H,02H,01H; 定义循环控制信号DAT1 DB 0H ;定义循环参量DAT2 DB 0H;---------初始化8253计数器-----------MAIN:MOV DX,203H;计数器0初始化,工作在方式3 MOV AL,36HOUT DX,ALMOV DX,200H;给计数器0赋计数初值960H(2400)MOV AL,60H ;低8位OUT DX,ALMOV AL,09H ;高8位OUT DX,ALMOV DX,203H;计数器1初始化,工作在方式3 MOV AL,76HOUT DX,ALMOV DX,201H;给计数器1赋计数处值80H(128) MOV AL,80H ;低8位OUT DX,ALMOV AL,00H ;高8位OUT DX,AL;-----------初始化8255--------------- MOV DX,021BH;A口输入,B口输出MOV AL,90HOUT DX,AL;-----------初始化向量表8号中断-------- MOV AX,0;ES:DIMOV ES,AXMOV DI,20H;4*8=32MOV AX,OFFSET INTP;装载中断函数的偏移地址MOV ES:[DI],AXMOV AX,8100H;MOV ES:[DI+2],AX;-------------初始化8259A--------------MOV DX,210H;ICW1初始化MOV AL,13H;上升沿触发,单片,要ICW4OUT DX,ALMOV DX,211H;ICW2初始化MOV AL,08H;初始化中断类型码范围,08-0F对应INT0-INT7OUT DX,ALMOV DX,211H;ICW4初始化MOV AL,01H;OUT DX,AL;--------------打开中断-------------- MOV DX,211H;打开8259A八号中断IN AL,DXAND AL,0FEH;1111 1110OUT DX,ALSTI;开CPU中断,IF=1MOV BX,OFFSET NUM;取控制信号的偏移地址MOV SI,0 ;将SI循环归零LOP: MOV AX,0JMP LOP;死循环,等待中断到来;------------中断程序开始----------INTP PROC FAR;LTP:MOV DX,219HMOV AL,[BX+SI]OUT DX,ALINC SICMP SI,04HJNZ NEXTMOV SI,0NEXT: MOV CX,03FFFH ;简短延时LOOP $CALL REFRESH;调用按键扫描子程序DEC DAT1 ;循环次数减一JNZ LTP ;循环次数减为零时跳出循环MOV AL,DAT2;重新填装DAT1的值MOV DAT1,ALMOV DX,210H;中断结束命令MOV AL,20HOUT DX,ALIRET;中断返回INTP ENDP;-------按键扫描程序---------- REFRESH PROC FARMOV DX,218HIN AL,DXCMP AL,00HJNZ NEXT1 ;若输入信号为00,则循环参量置为1 MOV DAT2,01HNEXT1: CMP AL,01HJNZ NEXT2 ;若输入信号为01,则循环参量置为2 MOV DAT2,02HNEXT2: CMP AL,03HJNZ NEXT3 ;若输入信号为11,则循环参量置为3 MOV DAT2,03HNEXT3: CMP AL,07HJNZ NEXT4 ;若输入信号为111,则循环参量置为4 MOV DAT2,04HNEXT4 MOV DAT1,0HRETREFRESH ENDP;-------按键扫描结束----------CODE ENDSEND START。
51单片机控制四相步进电机电路图
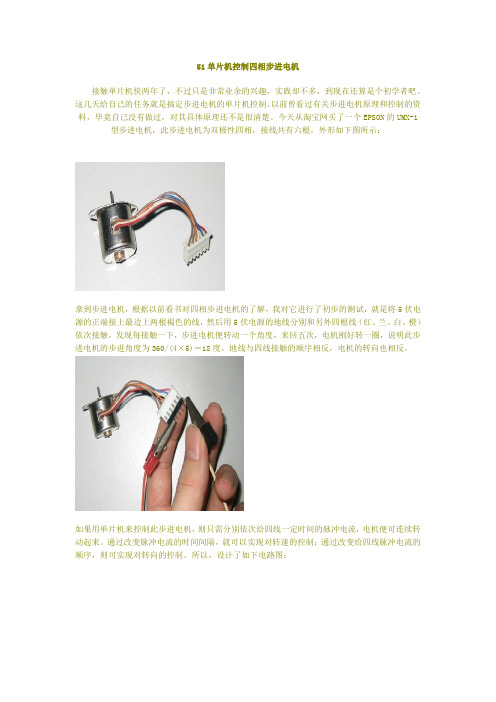
51单片机控制四相步进电机接触单片机快两年了,不过只是非常业余的兴趣,实践却不多,到现在还算是个初学者吧。
这几天给自己的任务就是搞定步进电机的单片机控制。
以前曾看过有关步进电机原理和控制的资料,毕竟自己没有做过,对其具体原理还不是很清楚。
今天从淘宝网买了一个EPSON的UMX-1型步进电机,此步进电机为双极性四相,接线共有六根,外形如下图所示:拿到步进电机,根据以前看书对四相步进电机的了解,我对它进行了初步的测试,就是将5伏电源的正端接上最边上两根褐色的线,然后用5伏电源的地线分别和另外四根线(红、兰、白、橙)依次接触,发现每接触一下,步进电机便转动一个角度,来回五次,电机刚好转一圈,说明此步进电机的步进角度为360/(4×5)=18度。
地线与四线接触的顺序相反,电机的转向也相反。
如果用单片机来控制此步进电机,则只需分别依次给四线一定时间的脉冲电流,电机便可连续转动起来。
通过改变脉冲电流的时间间隔,就可以实现对转速的控制;通过改变给四线脉冲电流的顺序,则可实现对转向的控制。
所以,设计了如下电路图:C51程序代码为:代码一#include <AT89X51.h>static unsigned int count;static unsigned int endcount;void delay();void main(void){count = 0;P1_0 = 0;P1_1 = 0;P1_2 = 0;P1_3 = 0;EA = 1; //允许CPU中断TMOD = 0x11; //设定时器0和1为16位模式1 ET0 = 1; //定时器0中断允许TH0 = 0xFC;TL0 = 0x18; //设定时每隔1ms中断一次TR0 = 1; //开始计数startrun:P1_3 = 0;P1_0 = 1;delay();P1_0 = 0;P1_1 = 1;delay();P1_1 = 0;P1_2 = 1;delay();P1_2 = 0;P1_3 = 1;delay();goto startrun;}//定时器0中断处理void timeint(void) interrupt 1{TH0=0xFC;TL0=0x18; //设定时每隔1ms中断一次count++;}void delay(){endcount=2;count=0;do{}while(count<endcount);}将上面的程序编译,用ISP下载线下载至单片机运行,步进电机便转动起来了,初步告捷!不过,上面的程序还只是实现了步进电机的初步控制,速度和方向的控制还不够灵活,另外,由于没有利用步进电机内线圈之间的“中间状态”,步进电机的步进角度为18度。
51单片机按键控制步进电机加减速及正反转
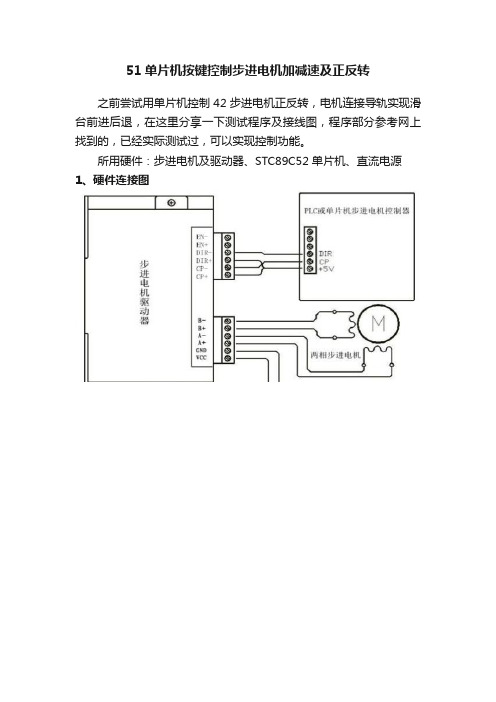
51单片机按键控制步进电机加减速及正反转之前尝试用单片机控制42步进电机正反转,电机连接导轨实现滑台前进后退,在这里分享一下测试程序及接线图,程序部分参考网上找到的,已经实际测试过,可以实现控制功能。
所用硬件:步进电机及驱动器、STC89C52单片机、直流电源1、硬件连接图•注意:上图为共阳极接法,实际连接参考总体线路连接。
•驱动器信号端定义:PUL+:脉冲信号输入正。
( CP+ )PUL-:脉冲信号输入负。
( CP- )DIR+:电机正、反转控制正。
DIR-:电机正、反转控制负。
EN+:电机脱机控制正。
EN-:电机脱机控制负。
•电机绕组连接A+:连接电机绕组A+相。
A-:连接电机绕组A-相。
B+:连接电机绕组B+相。
B-:连接电机绕组B-相。
•电源连接VCC:电源正端“+”GND:电源负端“-”注意:DC直流范围:9-32V。
不可以超过此范围,否则会无法正常工作甚至损坏驱动器.•总体线路连接输入信号共有三路,它们是:①步进脉冲信号PUL+,PUL-;②方向电平信号DIR+,DIR-③脱机信号EN+,EN-。
输入信号接口有两种接法,可根据需要采用共阳极接法或共阴极接法。
在这里我采用的是共阴极接法:分别将PUL-,DIR-,EN-连接到控制系统的地端(接入单片机地端);脉冲输入信号通过PUL+接入单片机(代码中给的P2^6脚),方向信号通过DIR+接入单片机(代码中给的P2^4脚),使能信号通过EN+接入(不接也可,代码中未接,置空)。
按键连接见代码,分别用5个按键控制电机启动、反转、加速、减速、正反转。
注意:接线时请断开电源,电机接线需注意不要错相,相内相间短路,以免损坏驱动器。
2、代码1.#include<reg51.h>2.#define MotorTabNum 53.unsigned char T0_NUM;4.sbit K1 = P3^5; // 启动5.sbit K2 = P3^4; // 反转6.sbit K3 = P3^3; // 加速7.sbit K4 = P3^2; // 减速8.sbit K5 = P3^1; //正反转9.10.sbit FX = P2^4; // 方向11.//sbit MotorEn = P2^5; // 使能12.sbit CLK = P2^6; // 脉冲13.14.inttable[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x40};15.16.unsigned char g_MotorSt = 0; //17.unsigned char g_MotorDir = 0; //18.unsigned char MotorTab[7] = {12, 10, 8, 6, 4, 2,1};19.20.signed char g_MotorNum = 0;21.22.void delayms(xms);23.void mDelay(unsigned int DelayTime);24.void T0_Init();25.26.void KeyScan(void);27.28.29.30.void main(void)31.{32.T0_Init();33.// MotorEn = 0; //34.FX = 0;35.while(1)36.{37.KeyScan(); //38.}39.40.41.}42.43.void T0_Init()44.{45.TMOD = 0x01;46.TH0 = (65535-100)/256; // 1ms47.TL0 = (65535-100)%256;48.EA = 1;49.ET0 = 1;50.// TR0 = 1;51.52.}53.54.void T0_time() interrupt 155.{56.// TR0 = 0;57.TH0 = (65535-100)/256;58.TL0 = (65535-100)%256;59.T0_NUM++;60.if(T0_NUM >= MotorTab[g_MotorNum]) //61.{62.T0_NUM = 0;63.CLK=CLK^0x01; //64.}65.// TR0 = 1;66.}67.68.69.//--------------------------70.void KeyScan(void)71.{72.if(K1 == 0)73.{74.delayms(10);75.if(K1 == 0)76.{77.g_MotorSt = g_MotorSt ^ 0x01;78.// MotorEn ^= 1;79.TR0 = 1;80.FX ^= 0; //反转81.}82.}83.84.if(K2 == 0)85.{86.delayms(10); //正转87.if(K2 == 0)88.{89.g_MotorDir = g_MotorDir ^ 0x01;90.FX ^= 1; //加速91.}92.}93.94.if(K3 == 0) //95.{96.delayms(5); //加速97.if(K3 == 0)98.{99.g_MotorNum++;100.if(g_MotorNum > MotorTabNum) 101.g_MotorNum = MotorTabNum; 102.}103.}105.if(K4 == 0) //106.{107.delayms(5); // 减速108.if(K4 == 0)109.{110.g_MotorNum--;111.if(g_MotorNum < 0)112.g_MotorNum = 0;113.}114.}115.116.if(K5 == 0) //117.{118.delayms(10); // 正反转119.if(K5 == 0)120.{121.g_MotorSt = g_MotorSt ^ 0x01; 122.g_MotorDir = g_MotorDir ^ 0x01; 123.MotorEn ^= 1;124.TR0 = 1;125.while(1)126.{127.FX ^= 1; //128.delayms(90000);129.FX ^= 0; //130.delayms(90000);131.}132.}133.}135.136.void delayms(xms)//延时137.{138.unsigned int x,y;139.for(x=xms;x>0;x--)140.for(y=110;y>0;y--);141.}3、常见问题解答•控制信号高于5v一定要串联电阻,否则可能会烧坏驱动器控制接口电路。
51单片机驱动步进电机的方法(详解)

1
CHD
v?c
31门
33
37
30
35
34
33
32
1
2
3
4
5
十
ICJ
ATfiSCSl
RST
PSEN
XI
XZ
EA
ALE
CADI) PdO
(AS)P20
(ADI,)PD 1
CA9)P2 1
CAD2)PD.a
CA10)P22
(AD3)PD.3
(AU)P2 3
(AI>4)PO 4
CA1Z)P3 4
CAD5)P0.5
51单片机驱动步进电机的方法
2019.02
这款步进电机的驱动电压12V,步进角为7.5度.一圈360度,需要48个脉冲完成!!!
I^H
该步进电机有
6根引线,排列次序如下:
1:红色、2:红色、
3:橙色、4:棕色、5:黄色、
6:黑色。
米用51驱动
ULN2003的方法进行驱动。
I
R1
I OK
C3 lOuF
P37而
9
X2
12M
X2
^_JOp_J 30p
GND
IC2
2£
3
37
3
2E
4
1D
11
30近
22
23
25
_5_6Zj
3
「
LB
IC
2B
2C
3B
3C
斗B
AC
5B
5C
6B
6C
7B
7C
GND
VCC
1
16
<
51单片机驱动步进电机电路及程序
相绕组通断,P1.1控制B相,P1.2
控制C相。
2021/8/5
13
以A相控制为例:
当 P1 . 0 输 出 为 1 , 发 光管不发光,因此光敏二极 管截止,使担负驱动任务的 达林顿管导通。A相绕组通电。
相反,当P1.0=0→发 光管发光→光敏管导通→达 林顿管截止→A相绕组不通 电。
2021/8/5
2021/8/511 NhomakorabeaSUB: SETB P3.0
SETB P3.0 ;保证输出高电平的时间>5μs
SETB P3.0
CLR P3.0
;变为低电平
MOV R7,30H
LOOP: NOP
;软件延时程序:
NOP
;基本延时(10μs×时间常数)
NOP
DJNZ R7,LOOP
RET
※时间常数事先可装入30H单元,改变30H单元的内容就可改
所以按照 A→AB→B→BC→C→CA→A
的顺序控制,电机将按顺时针方向旋转, 每步转动1.5°,即步距角=1.5°,
由于要经过6步才走完一个齿距 (6×1.5°=9°),所以叫三相六拍。
2021/8/5
7
如果要使步进电机反转,只要按
A→AC→C→CB→B→BA
顺序通电就行了。
结论:从上面两种运行方式可看出,错齿是促使步
进电机旋转的根本原因,当某相通电,相应的齿对
齐,迫使电机旋转一个步距角,未通电的各相的齿
出现了新的错位。改变通电的顺序和通电的相数,
可组合出其它的运行方式。
讨论:三项三拍和三项六拍运行方式,哪种定位
2021更/8/5精确?
8
三、步进电机有如下特点:
❖ 给步进脉冲电机就转,不给步进脉冲电机就不转; ❖ 步进脉冲频率高,步进电机转得快;步进脉冲频率
51单片机驱动步进电机__终极完整版
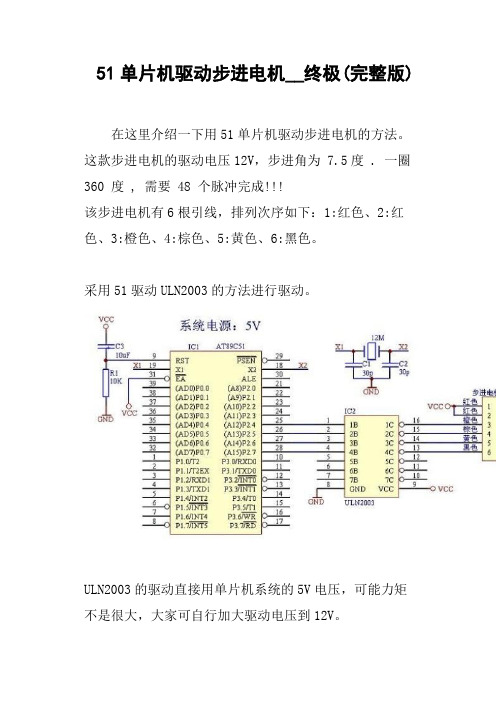
51单片机驱动步进电机__终极(完整版)在这里介绍一下用51单片机驱动步进电机的方法。
这款步进电机的驱动电压12V,步进角为 7.5度 . 一圈360 度 , 需要 48 个脉冲完成!!!该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、5:黄色、6:黑色。
采用51驱动ULN2003的方法进行驱动。
ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。
;************************************************ ******************************;************************* 步进电机的驱动*************************************** ; DESIGN BY BENLADN911 FOSC = 12MHz 2005.05.19;---------------------------------------------------------------------------------; 步进电机的驱动信号必须为脉冲信号!!! 转动的速度和脉冲的频率成正比!!!; 本步进电机步进角为 7.5度 . 一圈 360 度 , 需要48 个脉冲完成!!!;---------------------------------------------------------------------------------; A组线圈对应 P2.4; B组线圈对应 P2.5; C组线圈对应 P2.6; D组线圈对应 P2.7; 正转次序: AB组--BC组--CD组--DA组 (即一个脉冲,正转 7.5 度);----------------------------------------------------------------------------------;----------------------------正转-------------------------- ORG 0000H LJMP MAIN ORG 0100HMAIN:MOV R3,#144 正转 3 圈共 144 脉冲 START: MOVR0,#00H START1: MOV P2,#00H MOV A,R0MOV DPTR,#TABLE MOVC A,@A+DPTRJZ START 对 A 的判断,当 A = 0 时则转到 START MOV P2,ALCALL DELAY INC R0DJNZ R3,START1MOV P2,#00H LCALL DELAY1;-----------------------------反转------------------------MOV R3,#144 反转一圈共 144 个脉冲 START2:MOV P2,#00H MOV R0,#05 START3: MOV A,R0MOV DPTR,#TABLE MOVC A,@A+DPTR JZ START2 MOV P2,A CALL DELAY INC R0DJNZ R3,START3 MOV P2,#00HLCALL DELAY1 LJMP MAINDELAY: MOV R7,#40 步进电机的转速 M3: MOV R6,#248 DJNZ R6,$ DJNZ R7,M3RETDELAY1: MOV R4,#20 2S 延时子程序 DEL2: MOV R3,#200 DEL3: MOV R2,#250 DJNZ R2,$ DJNZ R3,DEL3 DJNZ R4,DEL2 RET TABLE:DB 30H,60H,0C0H,90H 正转表 DB 00 正转结束DB 30H,90H,0C0H,60H 反转表 DB 00 反转结束 END 51单片机控制四相步进电机拿到步进电机,根据以前看书对四相步进电机的了解,我对它进行了初步的测试,就是将5伏电源的正端接上最边上两根褐色的线,然后用5伏电源的地线分别和另外四根线(红、兰、白、橙)依次接触,发现每接触一下,步进电机便转动一个角度,来回五次,电机刚好转一圈,说明此步进电机的步进角度为 360/(4×5)=18度。