第3章_直流电机的电力拖动
电机学(刘颖慧)课件第3章直流电动机的电力拖动基础[48页]
![电机学(刘颖慧)课件第3章直流电动机的电力拖动基础[48页]](https://img.taocdn.com/s3/m/02aefbf5d1f34693daef3e9a.png)
电机学 Electric machinery
3.1 电力拖动系统的运动方程式和负载转矩特性
❖ 1.运动方程式
+
U
-
J
d
dt
Tem
TL
❖ 转动惯量:
J GD2 mD2 4g 4
M
Tem n
TL
图3.1.1 电动机与工作机构
Department of Electrical Engineering, HUT
电机学 Electric machinery
❖ 2.负载的转矩特性 ❖ a.恒转矩负载
n n
o
TL
o
TL
3.1.2 反抗性恒转矩负载特性
图3. 1. 3 位能性恒转矩负载特性
Department of Electrical Engineering, HUT
电机学 Electric machinery
0
T
图3. 2. 4
电动机不同电压机械特性
Department of Electrical Engineering, HUT
电机学 Electric machinery
❖ 减弱励磁磁通时的人为特性:
❖ 当 U UN R Ra 只减弱励磁磁通
n
UN Ce
Ra Ce
Ia
n
n02 2 n01 1 2 1 N
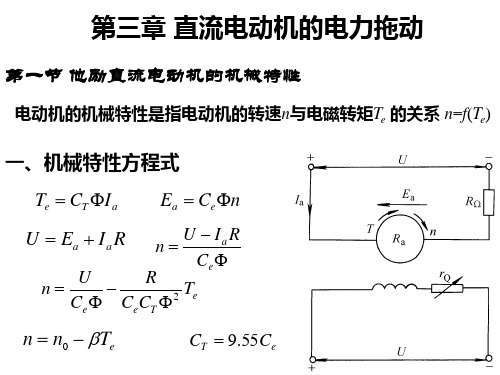
第3章 直流电动机的电力拖动基础
电机学 Electric machinery
❖ 电力拖动的定义:用各种电动机作为原动机拖动生产机械, 产生运动,电力拖动也称为电力传动。直流电力拖动是由直 流电动机来实现的。
电源
控制设备
电动机
工作机构
Department of Electrical Engineering, HUT
电机与电力拖动基础教程第3章(3)
(0,-n0),斜率为b,与电动状态时 电枢串入电阻RW时的人为机械特性 相平行的直线。
b
Ra RW CeCT Φ 2
第3章
返 回
上 页
下 页
(3)电压反接制动过程 电压反接时,n不能突变,工 作点由第一象限A点平移至第 二象限B点。T=-TB<0,T与 TL共同作用使电机减速,直至 n=0。反接制动过程结束。 如果电机拖动反抗性负载,n=0时, T=-TC>-TL,电动机反向电动(第三 象限)直至T=-TL(D点),电动机稳定 运行。
第3章
返 回
上 页
下 页
2.电动势反接的反接制动 电动势反接的反接制动仅 适用于位能性恒转矩负载, 又称倒拉反接制动或转速 反向反接制动。 (1)电动势反接制动的实现
当开关K闭合,电动机运行
于电动状态。 当开关K断开,电枢回路串 入较大电阻RW,使n=0时, 电磁转矩小于负载转矩,电动 机反向加速,T与n反向,进 入电动势反接的反接制动运行。
Ra RW n T nC 2 CeCT ΦN
T=TL
CeCT Φ n RW Ra TL
2 N C
第3章
返 回
上 页
下 页
5.能耗制动பைடு நூலகம்点
(1)制动时 U=0,n0=0 ,直流电动机脱离电网变成直流发电 机单独运行,把系统存储的动能或位能性负载的位能转变 成 电能( EaIa)消耗在电枢电路的总电阻上I2(Ra+RW)。 (2)制动时, n与T成正比 ,所以转速n 下降时,T也下降,故 低速时制动效果差,为加强制动效果,可减少RW,以增大 制动转矩T ,此即多级能耗制动 C Φ n T CT ΦN I a CT ΦN e N , T n Ra RW
电机与拖动 第3章 直流电机的电力拖动
B、他励直流电动机的常用的起动方法
为了获得足够大的起动转矩的同时降低起动电流,起动时一般应按照如下 步骤进行:(1)首先在励磁绕组中加入额定励磁电流,以建立满载主磁场;(2) 待主磁场建立之后再加入电枢电压。
电枢回路串电阻起动
直流电机的 起动方法
降压起动
a、电枢回路串电阻起动
3.18 直流电动机人工起动器的电气原理图
B、电力拖动系统的稳定运行条件
定义: 对于稳态运行的电力拖动系统,若受到外部扰动(如电网电 压的波动,负载转矩的变化等)后系统偏离原来的稳态运行点。一 旦干扰消除,系统能够恢复到原来的稳态运行点,则称系统是稳定 的;否则,系统是不稳定的。
图3.13 电力拖动系统的稳定运行分析
电力拖动系统稳定运行的条件为:
B、多轴电力拖动系统的折算
a、折算的概念
图3.3 多轴电力拖动系统的简化
折算的原则是:确保折算前后系统所传递的功率或系统储存的动能 不变。
b、折算的方法
1) 机械机构的转矩折算
折算时需考虑电动机和生产机械的工作状态。现分析如下: (1)当电动机驱动机械负载时,传动机构的损耗是由电动机承担的。于是有:
TL TL Lt
根据上式,折算后的负载转矩为:
TL
TLt TLt j ( ) L
(3-5)
2)直线作用力的折算
折算时同样应考虑功率的流向问题。 图3.4给出了电机拖动起重机负载实现升降运动的示意图。
图3.4 电机带动起重机负载的示意图 (1)当重物提升时,传动机构的损耗自然由电动机承担。于是有: 又
Tem n
nA
TL n
(3-15)
nA
上述结论可以通过系统的动力学方程式或上图的分析求得。其 物理意义是:当在A点处于稳定运行系统受到外部扰动使得转速增 加时,负载转矩的增加应大于电磁转矩的增加,系统才能够减速, 回到原来的运行点。此时,系统在A点处是稳定运行的。
电机与电力拖动
电机与电力拖动1. 引言电机是一种将电能转化为机械能的设备,广泛应用于各个领域中。
电力拖动则指的是利用电动机驱动机械设备或系统进行运动或操作的过程。
本文将介绍电机的基本原理以及电力拖动的应用。
2. 电机的基本原理电机是通过电磁感应原理将电能转化为机械能的设备。
其基本原理为根据施加在导体上的电流产生的磁场与外部磁场之间的相互作用,进而产生力或转矩。
电机根据其工作原理的不同可以分为直流电机和交流电机。
直流电机是利用直流电源供电,通过直流电源的正反极性变化来产生旋转运动。
交流电机则是利用交流电源供电,通过交流电源的频率来产生旋转运动。
电机的主要构成部分包括定子和转子。
定子是固定不动的部分,其中包含了产生磁场的线圈。
转子则是可以转动的部分,通过与定子的磁场相互作用来产生力或转矩。
3. 电力拖动的应用电力拖动广泛应用于各个领域,例如工业自动化、交通运输以及家用电器等。
以下列举了几个常见的电力拖动应用:3.1 工业自动化在工业自动化中,电力拖动被广泛应用于各种生产设备和机械系统。
通过电动机驱动,可以实现自动化生产线的运行,提高生产效率和质量。
例如,自动化生产线中的输送带系统就是通过电动机驱动的。
电动机的转动产生的转矩传递给输送带,使其能够带动物料或产品在生产线上移动。
3.2 交通运输电力拖动在交通运输领域中起到了重要作用。
例如,电动汽车就是利用电动机作为动力源来驱动车辆运行。
电动汽车相比传统的内燃机汽车具有环保、高效等优势。
此外,电力拖动还被应用于电动火车、电动船舶等交通工具中,实现了对传统燃油动力的替代。
3.3 家用电器家用电器中的电机和电力拖动也是不可或缺的。
例如,洗衣机、空调、冰箱等家电产品都需要电机来驱动其工作。
电机驱动使得家用电器能够实现自动化、智能化的功能,提高生活质量和舒适度。
4. 总结电机作为将电能转化为机械能的设备,通过电磁感应原理实现了这一转化过程。
电力拖动则是利用电动机驱动机械设备或系统进行运动或操作的过程。
电机拖动第三章

由图可见,位能性恒转矩负载的转矩不随转速 方向的改变而改变。无论电机正、反转,负载转 矩始终为单一方向。
B、通风机负载特性 特点:
负载转矩基本上和转速的平方成正比,
即
TL Kn
2
例:通风机、水泵及油泵等,负载转动时, 其中空气、水、油等介质对机器叶片的 阻力基本上和 2 成正比。
n
C、恒功率负载的转矩特性 恒功率负载:如 车床、恒张力卷 取机,随着卷取 直径增大,力矩 增大。但为了保 持张力不变,线 速度应不变,相 应地转速就要降 低,结果是功率 不变。
2
当电机工作在A点时,
TemA TLA
则有:
GD2 dn Tem TL 375 dt
考虑到微小增量为在A点的偏 导数乘上 n ,上式为
Tem n
nA
TL n n
nA
GD2 dn n 375 dt
整理为线性微分方程
Tem n TL n
为了简化计算,把多轴复杂系统等效成
一个单轴简单系统,方法是把电机轴后面 的传动机构和工作机构部分(如下图中虚
线框部分所示)都折算到电机轴上,用一
个等效负载来代替它,这样就可以用单轴
系统的运动方程式来研究多轴系统,这时
运动方程式为
折算
折算方向:一般是从生产机械轴向电动 机轴折算。原因是研究对象是电动机。 且电动机轴一般是高速。根据传送功率 不变的原则,高速轴上的负载转矩数值 小。 折算的原则是:确保折算前后系统所传 递的功率或系统储存的动能不变。
例3-2: 用稳定运行的概念判断图中 的A点是否为稳定运行点?
系统原在A点平衡运转
TL1 TL 2
n nA
Tem TL1
第三章 直流电动机的电力拖动
U
Ec R1
两级起动时
I1 R2 R1 I 2 R1 Ra
推广到m级起动的一般情况
I1 Rm Rm1 R2 R1
I 2 Rm1 Rm2
R1 Ra
I1 / I2 称为起动电流比
30
R1 Ra
R2 R1 Ra 2
Rm1
Rm 2
Ra
m1
Rm Rm1 Ra m
17
B、风机与泵类负载的转矩特性
通风机负载转矩与转速的大小有关,基本上与转速的平方成正比
特点: TL Kn2
通风机类负载的转矩特性
如实际生产机械中的水泵、油泵、离心式通风机等其介质 对叶片的阻力基本上与转速的平方成正比。
18
C、恒功率负载的转矩特性
特点:
TL
k
1 n
恒功率负载的转矩特性
在不同转速下,负载转矩基本上与转速成反比,其功率基本
恒转矩负载 大多数生产机械可归纳为: 风机与泵类负载
恒功率负载
14
各类生产机械的负载转矩特性 A、恒转矩负载的转矩特性
特点: 负载转矩不受转速变化的影响。在任何转速下,负载转矩
总是保持恒定或大致恒定。
反抗性恒转矩负载 恒转矩负载
位能性恒转矩负载
15
(1) 反抗性恒转矩负载的转矩特性如下图所示。
反抗性恒转矩负载的转矩特性
22000 Ω
0.174Ω
Ce N
UN
I N Ra nN
220 116 0.174 V/(r/min) 1500
0.133 V/(r/min)
理想空载点 Te 0
n
n0
UN
Ce N
220 r/min 1650r/min 0.133
[工学]刘锦波 电机与拖动 第3章 直流电机的电力拖动第2部分
![[工学]刘锦波 电机与拖动 第3章 直流电机的电力拖动第2部分](https://img.taocdn.com/s3/m/74e800c131126edb6e1a10d6.png)
图3.32 他励直流电机反接制动时的接线图
1. 反接制动时电动机的机械特性与制动电阻的计算
反接制动过程中电机的机械特性可表示为:
n
U1 Ce
(Ra CeCT
RB ) 2
Tem
n0
Tem
(3-72)
上式可用图3.33所示曲线表示之。很显然,反接制动时电机的机械特性是一条位于第II 象限的直线。
反接制动时的制动电阻决定了制动转矩的大小。为防止制动电流过大,一般按照下列
规则选择制动电阻 RB ,即:
IB
U N EaN Ra RB
2IN
23
式中,I B 为反接制动的起始电流。相应的制动电阻为:
RB
UN EaN 2IN
Ra
UN IN
Ra
(3-73)
图3.33 反接制动时直流电机的机械特性
K ni ni1
(3-49)
上式中,K 越接近于1,则平滑性越好。若采用无级调速,即速度连续可调,则 K 1 。
d:原始投资与运行成本
调速系统的经济指标包括设备的原始性一次投资和设备的运行费用。运行费用主要是
指调速过程中的损耗,通常用效率来衡量,即:
4
P2 100% P2 100%
P1
P2 p
现说明如下:
图3.28分别给出了恒转矩负载采用恒功率调速方式以及恒功率负载采用恒转矩调速方式 时的负载转矩特性和电动机的机械特性。
图3.28 调速方式与负载类型不匹配的说明
14
a、假若恒转矩负载选择恒功率调速方式(见图3.28a)。
为了满足整个调速范围内的转矩要求,必须满足:Tem TL 。根据图3.28a,显然,
结论: 随着励磁电流的减小,电动机的转速升高。为了确保电机的磁
电机与电力拖动 第3章 直流电机的基本理论讲解
3.6 直流电动机稳态运行时的基本方程式和工作特性(重点)
3.6.1 直流电动机稳态运行时的基本方程式(电压、转矩、功率)
1 电压平衡方程式
+ Ia
If +
U Ea M
U
-
-
2 转矩平衡方程式
励磁电路: U = Rf If 电枢电路: U= Ea + Ra Ia
U: 端电压;
Ea :电枢电动势; Ra :电枢回路电阻; Rf :励磁回路电阻; U>Ea时:电动机; U<Ea时:发电机;
If
Ia
Ea : 感应电动势
Uf
Ea MU
Ia :电枢电流 Ra :电枢电阻 I f :绕组电流
Rf Ra
Rf :绕组电阻
他励 I I N I f Ia
U UN Ea IaRa
U UN I f Rf
Ra
If
U
M
Rf
并励
Ea
I IN I f Ia U UN Ea IaRa
P
Ea
I
;
a
n ::转机速械;角速度, (2n ) / 60;
转矩的求法:T CT Ia
CT : 转矩常数CT ( pN ) /(2a); p : 磁极对数;
Ia:电枢电流I N ;
题2:一台他励直流电动机的额定数据为PN=17kW,UN=220V,nN=1000r/min, IN=92A,电枢绕组的电阻Ra=0.2Ω,电刷压降2△Ub=2V。试计算:(1)电 动机的额定电磁转矩。(2)理想空载转速和实际空载转速。(3)电动机的 输出转矩保持为额定值不变,在电枢回路中串入0.3Ω电阻,求电动机转速。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( 55 / 20 ) ( 64 / 30 ) ( 78 / 30 ) ( 66 / 30 )
2
2
2
2
9 . 81 N m
2
2)直线运动部分
n n8
j
z2 z1
z4 z3
z6 z5
z8 z7
先求负载线速度v, 而齿轮8转速
420 ( 55 / 20 )( 64 / 30 )( 78 / 30 )( 66 / 30 )
3)惯量与飞轮矩 G D 的折算
2
折算前后系统储存的动能保持不变的原则,有: (系统总 =电机轴+中间1+…+负载)
1 2 J
2
动能:物体由于运动而具有的 能量。单位:焦耳
(能量、作功、力矩单位:N.m)
1 2
JM
2
1 2
J 1 1
2
1 2
J 2 2
2
1 2
单位 :
米 秒分
飞轮惯量GD2是一个整体,单位是N∙m2,不必看成G与D2 的 乘积, GD2 由产品样本或机械手册上查出。 GD2 中的 D 为 回转直径,不是实际直径。
对于实际电力拖动系统,考虑到 (1)电机可能正、反转运行; (2)电机可能运行在电动机或发电机运行状态; (3)负载转矩也可能由上升过程中的制动性变为下降过程中的驱 动性转矩。因此,使用上式时需注意正、负号问题。正负号一般按 如下惯例选取: (1)首先取转速的方向为正方向; (2)对于电磁转矩,若与转速方向相同,则取“+”;反之, 则取“-”; (3)对负载转矩而言,若与转速方向相反,则取 “+”;方 向相同则取“-”;
代入上式,则有:
(G D M ) 4 g m L
2 '
vL
2 2
(G D M ) 4 g
2 '
GL g
(
60 2
)
2
vL n
2 2
(G D M ) (
2
60
)
2
G LvL n
2
2
365
G LvL n
2
2
(3-11)
通过上述折算,便可以将多轴拖动系统(包括旋转及直线运动)折算 为单轴拖动系统。然后借助于单轴拖动系统的动力学方程式对多轴拖动系 统的静、动态问题进行分析研究。
J L L
2
则折算后的转动惯量为:
J J M J1 ( 1 ) J( 2
2
(3-9)
) J( L
2
2
L
)
注意:勿将惯量J和速比 j 混淆
G 1 D1 n n1
2
2
将
J
GD 4g
2
代入上式,则折算后的
GD
2
GD
2 M
2
G2D2 n n2
2
折算后电机侧单轴 等效转矩与角速度
折算前工作机构 实际转矩与角速度
折算时需考虑电动机和生产机械的工作状态。现分析如下:
(1)当电动机驱动机械负载时,传动机构的损耗是由电动机承担的。于是有:
TL t TL L
(功率不变,单位:N.m/s)
根据上式,折算后的负载转矩为:
TL T L L ) T L ) T L
2
2
齿轮号 齿数Z 飞轮惯量
GD
2
1 20 4.12 电机
2 55
3 30
4 64 28.40
5 30 18.60
6 78 41.20
7 30 24.50
8 66 63.75
20.10 9.81
/ N m
2
考虑到转速与齿数成反比,即: 解 1)旋转部分
GD
2 a
n1
z2 z1
n2
2 5
2和3同轴
图3.4 电机带动起重机负载的示意图 (3-7)
传动损耗=源侧功率-目的侧功率
式中, t 为重物下放时传动机构的效率。
△p=TLΩ-FLvL
重物下放时传动机构的效率 t 与同一重物提升时传动机构的效率 t 之 间满足下列关系式:
t 2
1
t
(3-8)
概念:提升与下放过程中 传动损耗相等,但效率不同。 是因重力存在所致,推导见教材
m:质量 ρ:半径 G:重量
G D g 4
2
GD 4g
2
考虑到机械角速度 与转速n之间的关系: 2 n / 60 ,于是有:
T em T L GD
2
dn
375 dt
(3-3)
单轴电力拖动系统的动力学方程式可由下式给出:
T em T L J d dt
GD 4g
2
电力拖动系统的基本概念
1.电力拖动
拖动:原动机带动生产机械运转叫拖动。 电力拖动:电动机作为原动机,生产机械
是负载,电动机带动生产机械运转的拖动 方式称电力拖动。
2.电力拖动系统:用电动机将电能转换
成机械能,拖动生产机械,并完成一定工 艺要求的系统。
3.1 电力拖动系统的动力学方程式
(3-1)
m:质量 kg ρ:半径 米 G:重量 N
其中,转动惯量 J 由下式给出:
J m
2
G D g 4
2
(3-2)
考虑到机械角速度 与转速n之间的关系: 2 n / 60 ,于是有:
说明
375 4 g 60 2
T em T L
GD
2
dn
375 dt
(3-3)
A、单轴电力拖动系统的动力学方程式
对于直线运动
F Fz m
图3.2 单轴电力拖动系统的示意图
dv dt
ma
对于旋转运动
d dt
( kg m )
2
单轴电力拖动系统的动力学方程式可由下式给出:
T em T L J
(3-1) (3-2)
其中,转动惯量J 由下式给出:
J m
2
d dt
图3.3 多轴电力拖动系统的简化
折算的原则是:确保折 算前后系统所传递的功 率或系统储存的动能不 变。
折算方向:一般是从生产机械轴向电动机轴 折算。原因是研究对象是电动机。且电动机 轴一般是高速。根据传送功率不变的原则, 高速轴上的负载转矩数值小。
b、折算的方法 1) 机械机构的转矩折算
T em T L
GD
2
dn
375 dt
根据上述正负号选取规则,式(3-3)运算结果存在下列三种情况: 1.若 T em T L 时,则 n =常值,系统稳态运行;
2.若 T em T L 时,则
3.若 T em T L 时,则
dn dt
0
,电机处于加速状态;
,电机处于减速状态。
2
2
G2D2 n n2
2
GLDL n nL
2
按照折算前后储存的动能保持不变的原则,有:
折算后电机侧单轴 等效惯量与角速度
(
) (
)
2
(
)
2
1 2
JM
2 n 60
2
1 2
m LvL
2
n n2
n n1
n1 n2
j1 j 2
将
2 ( GDM ) JM 4g
,
n8
n ( z 2 / z 1 )( z 4 / z 3 )( z 6 / z 5 )( z 8 / z 7 )
r / min 12 . 5 r / min
( GD
2 M
工作台速度
v L z 8 t8 n8
G Db
2
) 365
'
G LvL n
2
2
66 0 . 02513 12 . 5 m/min
2 2 2
( z 2 / z1 ) ( z 4 / z 3 ) ( z 6 / z 5 )
( 4 . 12
20 . 10 9 . 81 ( 55 / 20 )
63 . 75
2
28 . 40 18 . 60 ( 55 / 20 ) ( 64 / 30 )
)N m
2
2
2
41 . 20 24 . 50 ( 55 / 20 ) ( 64 / 30 ) ( 78 / 30 )
GD
2
GD
2 M
G 1 D1 n n1
2
2
G2D2 n n2
2
GLDL n nL
2
(
) (
)
2
(
)
2
GD GDM
2 2
G 1 D1 j1
2
2
G2 D2
2
2 2
GLDL j
2
2
( j1 j 2 )
(G D M ) (
2
60
)
2
G LvL n
2
365
G LvL n
2
20 . 8 m/min
2
0 . 347 m/s
2
3 6 5( G 1 G 2 ) v L n
2
365 (12050 17650 ) 0 . 347 420
2
N m
7 . 35 N m