基于对应线标定的无人机着陆位姿确定算法
一种基于星表特征直线匹配的着陆器位姿估计算法

0
引 言
随着深空探测技术的不断发展,着陆段自主导航
区域基于陨石坑匹配的算法不能适用,例如 NASA 为 “ 火星 2020 ” 任务拟定的 3 个着陆点(如图 1 ~ 3 所示区 域)以及 “ 好奇号 ” 着陆区域(如图 5 所示区域)均不 适合利用陨石坑为导航路标;同时陨石坑的提取与匹 配算法较为困难、利用现有的匹配算法[11-12],容易出现 误匹配的情况。星表的山脊、沟壑和其他近似直线的 纹理特征,比陨石坑分布更为广泛。这些特征地理坐 标可提前获取,因此可作为绝对导航路标。本文针对 着陆段导航,提出一种利用星表特征直线作为导航路 标的着陆器位姿估计算法,该算法从着陆图像中提取 出星表特征直线,与星表基准直线特征数据库(提前 建立)匹配3对以上特征直线,可计算出着陆器的位置 和姿态。
首先采用EDLine算法对着陆过程中所拍摄的图像进行特征直线提取;其次根据直线局部特征对特征直线进行匹配;之后利 用至少3对已匹配的特征直线,建立关于着陆器位姿的几何约束方程;然后根据奇异值分解法得到着陆器位姿的候选解;最 终通过最小二乘法从候选解中选取着陆器位置、姿态的唯一解。仿真结果表明:该算法可以快速估计着陆器位姿,且在高 度为2 000 m时位置误差小于2 m、姿态误差小于0.10°。 关键词:特征直线匹配;视觉导航;深空探测;直线描述符;星际着陆
si和ei分别为投影直线li的两个端点。 建立图 6 所示坐标系,选取着陆点坐标系作为世 界坐标系Ow Xw Yw Zw ,同时以光心为原点、光轴为Zc轴 建 立 导 航 相 机 坐 标 系 Oc Xc Yc Zc , 而 局 部 坐 标 系 为
1
特征直线的检测与匹配
本文采用Cuneyt Akinlar等[13]提出的EDline算法对
基于视觉信息的无人机自主着陆过程姿态角简化计算方法

1 0・
理 论与 实践
2 0 1 4年 第 3 4卷 第 1 期
d o i :1 0 . 1 1 8 2 3 / j . i s s n . 1 6 7 4—5 7 9 5 . 2 0 1 4 . 0 1 . O 3
基 于视 觉 信 息 的 无 人 机 自主 着 陆 过 程 姿 态 角 简 化 计 算 方 法
曾志远 , 许 瑛
( 1 .南 昌航 空大 学 航 空制造 工程 学 院,江 西 南 昌 3 3 0 0 6 3 ;2 .南 昌航 空大 学 飞行器 工程学 院 ,江 西 南 昌 3 3 0 0 6 3 )
摘 要 :研 究 了一 种 基 于 地 平 面 算 法 的 无 人 机 着 陆 过 程 中 姿 态 角 估 算 的 改进 方 法 。 通 过 地 面 坐 标 系 到 摄 像 机
上 , 计 算 无 人 机 的 滚 转 角 和 俯 仰 角 , 用 跑 道 特 征 来 估 算 无 人 机 偏 航 角 ; 通 过 矩 阵 变 换 解 算 出 无 人 机 的 姿 态 角 , 并
通 过 仿 真 进 行 了 实 验 验 证 。该 方 法 对 摄 像 机 的 安 装 位 置 没 有 特 殊 的 要 求 ,解 除 了传 统 方 法 对 摄 像 机 安 装 位 置 的 限 制 , 简 化 了无 人 机 姿 态 信 息 的求 解 方 法 。
( 1 . S c h o o l o f A e r o n a u t i c a l Ma n u f a c t u i r n g E n g i n e e i r n g ,N a n c h a n g H a n g k o n g U n i v e r s i t y ,N a n c h a n g 3 3 0 0 6 3 ,C h i n a ;
基于视觉的无人机自动着陆定位算法
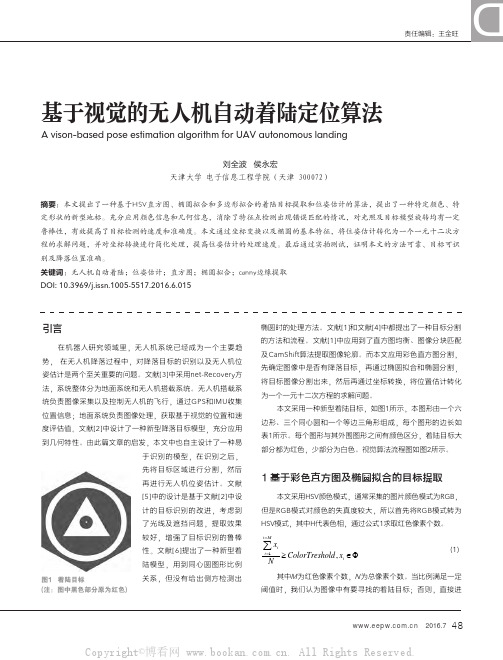
图1 着陆目标(注:图中黑色部分原为红色)图2 视觉算法流程图图3 坐标转换图(4)当椭圆确定后,因为范围大的椭圆对圆心估计的失真较标原点的空间位置坐标,R是无人机相对于着陆目标原点的角度(6)(8)在摄像机拍摄的图像中(10)(11)从坐标系O'X'Y'Z'到坐标系图4 自然光线下目标提取结果(注:图中六边形为蓝色,三角形为绿色,圆形及中间原点为红图5 较暗光线下目标提取结果(注:图中六边形为蓝色,三角形为绿色,圆形及中间原点为(15)(17)联立(15)和(17),并令得关求得值带都已求出(18)[1]Zhao Y, Pei H. An improved vision-based algorithm for unmanned aerial vehicles autonomous[2]Cocchioni F, Mancini A, Longhi S. Autonomous navigation, landing and recharge of a quadrotorusing artificial vision[C] Unmanned Aircraft Systems (ICUAS), 2014 International Conference on.[3]Kim H J, Kim M, Lim H, et al. Fully autonomous vision-based net-recovery landing system for afixed-wing uav[J]. Mechatronics, IEEE/ASME Transactions on, 2013, 18(4): 1320-1333.[4]Hui C, Yousheng C, Xiaokun L, et al. Autonomous takeoff, tracking and landing of a UAV on amoving UGV using onboard monocular vision[C] Control Conference (CCC), 2013 32nd Chinese.[5]Cocchioni F, Frontoni E, Ippoliti G, et al. Visual Based Landing for an Unmanned Quadrotor[J].[6]Lange S, Sünderhauf N, Protzel P. Autonomous landing for a multirotor UAV using vision[C]。
一种基于视觉的快速无人机位姿计算方法

一种基于视觉的快速无人机位姿计算方法随着无人机技术的发展,无人机的应用范围越来越广泛,如无人机航拍、无人机巡检等应用场景不断涌现。
无人机的位姿计算是无人机导航和控制的重要环节,因此针对无人机位姿计算的研究变得尤为重要。
本文将介绍一种基于视觉的快速无人机位姿计算方法。
一、背景介绍无人机在航拍、农业植保、巡检等领域的应用越来越广泛,其导航和控制技术也得到了飞速发展。
而无人机的位姿计算作为无人机导航和控制的基础,一直是研究的热点之一。
传统的无人机位姿计算方法往往依赖于惯性测量单元(IMU)、全球定位系统(GPS)等硬件设备,但这些硬件设备存在成本高、精度有限、对环境要求高等缺点。
基于视觉的无人机位姿计算方法逐渐受到研究者的关注。
二、目前的研究现状在当前的研究中,基于视觉的无人机位姿计算方法主要分为两种:基于单目视觉和基于双目视觉。
基于单目视觉的方法往往利用相机单目图像,通过特征提取、特征匹配、运动估计等步骤来计算无人机的位姿。
而基于双目视觉的方法则使用两个相机获取双目图像,利用双目视差和三角测量等方法来计算无人机的位姿。
在实际应用中,单目视觉方法计算简单,成本低,但精度较低;双目视觉方法精度较高,但计算复杂,成本也较高。
如何在保证计算精度的前提下,尽可能降低计算成本和复杂度,是当前研究的重点之一。
三、基于视觉的快速无人机位姿计算方法本文提出的基于视觉的快速无人机位姿计算方法,主要包括以下几个步骤:1. 特征提取利用无人机载载相机获取图像,对图像进行特征提取,获取图像中的关键点和特征描述子。
2. 特征匹配将当前帧图像中提取到的特征点与参考帧图像中的特征点进行匹配,得到特征点的对应关系。
3. 运动估计利用特征点的对应关系,通过运动估计算法(如光流法、直接法、特征法等),计算无人机当前帧相对于参考帧的位姿变换。
4. 位姿优化通过位姿优化算法(如基于特征点的非线性优化算法、基于光流的优化算法等),对计算得到的位姿进行优化,提高位姿估计的精度。
基于深度学习的无人机位姿视觉测量与计算方法

基于深度学习的无人机位姿视觉测量与计算方法随着无人机的发展,越来越多的无人机产品出现满足着人们的不同需求。
由于无人机飞行控制自动化、智能化等方面日益增长的需求,我们需要准确感知无人机的位置与姿态信息。
传统方法通常具有累计误差大、易受外界干扰等缺点,本文通过视觉信号对无人机进行测量不仅能够实现对目标的低成本非接触测量而且能够检测到大量有效信息。
为了实现无人机位姿估计,本文使用视觉传感器提取图像中的关键信息对无人机的位置与姿态进行测量与计算。
本文首先建立视觉测量的坐标系,并分析摄像机的投影成像原理及其中包含的数学模型。
摄像机成像原理和双目汇聚模型是本文进行位姿估计的基础,为求解相机模型参数,使用标定板照片对双目相机的内外参数进行求解。
其次,为了从复杂的视觉图像中提取关键坐标信息,提出了一种基于深度学习的双卷积网络关键点预测算法,通过第一个卷积神经网络对关键点检测、基于预测坐标的图像分割以及第二个卷积网络的关键点优化三个步骤最终输出无人机四个旋翼轴心坐标的信息。
为了定位双目相机之间的匹配点,使用基于Faster RCNN的目标检测方法对目标形心进行定位匹配,经过特征图提取、候选区域筛选、ROI池化尺寸修改和损失函数最小化等步骤得到最后的坐标输出。
再次,本文使用双卷积网络检测到的4个特征点,输入PNP算法进行计算得到无人机空间姿态信息,通过双目相机间的关系建立双目交汇模型,向模型输入目标检测网络检测到的双目匹配坐标得到无人机的位置信息。
最后,将无人机姿态与位置的测量方法合并成为一个系统,并对该位姿检测系统进行了实验测试,实验结果表明该方法具有可行性,能够满足无人机视觉测量的工作。
本文创新点体现在提出了一种基于深度学习的视觉关键信息检测方法与传统视觉成像原理相结合的位置与姿态测量与计算方法,该方法能够在无人机自主导航、自主着落、自动避障的领域得到广泛的应用。
本研究得到国家自然科学基金面上项目(编号:91646108,61473222)资助。
基于Meanshift与摄像机标定的无人机定位方法

基金项目:国家自然科学基金资助项目 ( 61203302); 天津市应用基础与前沿技术研究计划项目 ( 14JCYBJC18900)
通信作者:成 怡 ( 1979—),女,博士,副教授,主要研究方向为视觉导航. E-mail:chengstu@
成 怡,王晓红,修春波
( 天津工业大学 电气工程与自动化学院, 天津 300387)
摘 要:针对在全球定位系统信号失效的情况下,提出一种利用机载相机拍摄的移动物体轨迹及其与无人机的相对 位置解算无人机的绝对位置的方法. 将 Meanshift 目标跟踪算法与摄像机标定技术相融合进行位置解算,即 根据获得的摄像机内外参数、移动物体的图像像素坐标和无人机与移动物体的相对位置确定无人机的世界 坐标. 经多组实验数据验证,位置解算值绝对误差均不超过真实值的 1%,分析结果证明了本方法在无人机 自主定位领域的可行性. 关键词:摄像机标定;无人机;定位;目标追踪;Meanshift 算法 中图分类号:TP391 文献标志码: A 文章编号: 1671-024 ( 2017)01-0055-06
无人机是利用无线电遥控设备和自备的程序控 制装置进行操纵的无人驾驶飞行器. 目前, 无人机技 术涉及农业、工业、军事等多个社会领域[1-3]. 无人机的 关键技术除续航能力外,定位控制能力也显得尤其重 要. 许多研究学者们对无人机在不同领域的定位问题 进行了研究 . 杨效余等 根据水体在红外图像中的统 计特性,提出了捕获跟踪水体地标的飞行器导航定位 方法;吴爱国等 采用改进的 SIFT ( 尺度不变特征转 换)图像匹配算法得到匹配点坐标,再经过坐标变换 解算得到无人机的三维坐标信息. 大多数无人机定位都采用 GPS 信号定位系统,但 在天气恶劣或环境极其隐蔽的情况下,GPS 信号可能 会出现丢失或受到干扰等情况,若此时无人机正在执
一种飞行器自主着陆区域判别方法
一种飞行器自主着陆区域判别方法
随着无人机应用的不断扩展,自主着陆技术的研究也越来越受到关注。
自主着陆需要
飞行器能够准确判断着陆区域的位置和周围环境,以及实现精准的降落。
因此,本文提出
了一种飞行器自主着陆区域判别方法,以期提高飞行器的自主着陆能力和安全性。
方法基于机器视觉技术,通过飞行器搭载的视觉传感器获取周围环境信息。
首先,将
视野图像转化为二维灰度图像,并进行二值化处理,以减少噪声干扰。
接着,采用边缘检
测算法(如Canny算法)提取出图像中的边缘信息。
然后,利用霍夫变换检测出图像中的
直线段,以提高图像的准确性和可靠性。
在得到边缘信息和直线段信息后,对图像进行分割,将图像分为多个区域。
对于每个
区域,计算出其中心点的位置,并利用聚类算法将中心点进行分类。
通过分类结果,可以
得知图像中可能存在的不同类型的物体和区域。
根据观测到的物体和区域,对飞行器所在
的位置和可能成为着陆点的区域进行判断和评估,并确定最适合的着陆点。
为了增加判别准确率,还可以结合地形地貌数据,如 DEM 数据,对着陆区域进行评估。
利用嵌套网格搜索法,将着陆区域划分为多个网格,计算每个网格的高度、坡度和坡
向等参数,结合飞行器高度数据进行综合评估。
评估结果可以为飞行器提供更高精度的自
主着陆指导信息。
总之,本文提出的飞行器自主着陆区域判别方法,基于机器视觉技术和地形地貌数据,综合考虑周围环境和地形地貌特征,能够提高飞行器的自主着陆能力和安全性,对无人机
和航空器的应用具有重要意义。
基于合作目标识别的无人机相对位姿估计

positional relationship of the drone.
Key words: unmanned aerial vehicle;target recognition;yolov3⁃tiny;pose estimation
Nanjing 210016,China;2. Key Laboratory of Unmanned Aerial Vehicle Technology,Ministry of Industry
and Information Technology,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,
Relative position estimation of drone based on cooperative target recognition
MA Jun⁃jie1,HUANG Da⁃qing2,QIU Nan⁃hao1,GONG Yong⁃fu1
(1.College of Electronic and Information Engineering,Nanjing University of Aeronautics & Astronautics,
improve the network structure and migration learning,compared with Yolov3 ⁃ tiny,the accuracy rate
increased by 2.6%,and the recall rate increased by 1.6%. Achieve accurate identification of cooperation
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(A U V)l dn , nvl o oua ai t nm to ae ntecl rt no r so dn n ss rpsd a ig a oe m n cl nv ai ehdbsdo ai ai f or pn igl e ipooe , n r g o h b o c e i
n su e d tr n r n ai n o i o ea i ol ig t g t rln i go AV id p n e t a d i i s d t ee i e t eo e tt n a d p st n r lt et a d n r e o a dn fU n e e d n l . t o m h i o i v n a f y
Esi a i n .l o i h fo i n a i n a o ii n f r tm to a g rc m o re t to nd p sto o
UAV a d n s d o o r s n i g l e a i r to l n i g ba e n c r e po d n i s c lb a i n n
姿态角误差控制在 3 内 , 。 位置误差控制在 3 内, % 可以满足某型无人机着陆阶段对导航信息的要求 , 并且 ,
该方法充分利用 了着陆场 自然直线特征 , 贴近实战需要 。
关键词 :无人机着陆 ; 视觉导航 ; 姿态位置 ;对应线标 定 中图分类号 :V 4 2 文献标识码 :A 文章编号 :10 - 7 7 2 0 )9 0 7 一o 00- 8 (0 7 0 - 0 9 4 9
Ab ta t I r e o i r v h id p n e c o h n vg t n i fr t n f r u ma n d ei e i l sr c : n o d r t mp o e t e n e e d n e f t e a ia i no mai o n n e a ra v h ce o o l源自刘兴华 曹云峰 沈春林 , ,
(. 1 南京航空航天大学 自动化学院 。 江苏 南京 2 0 1 ; 10 6 2 南京航空航天大学 高新院 。 . 江苏 南京 2 0 1 ) 10 6 摘 要 :为提高无人机着陆阶段导航信息的 自主性 , 研究 了一种 基于对应线标 定 的单 目视 觉位 姿测量方
维普资讯
20 0 7年 第 2 6卷 第 9期
传感器与微 系统 ( r su e adMi oytm T cnlg s Ta d cr n c ss ehooi ) n r e e
7 9
基 于对 应 线 标 定 的无 人 机 着 陆位 姿确 定 算 法
c l r t n o e c re p n i g l e . o sr i te u t n f o e tt n & p st n o ai ai ft o s o d n i s c n t n q ai s o r na i b o h n a o i o o i o fUAV a e e t b i e sn i sa l h d u i g r s
t r e r d m au a i e n t e ln . i al smu ain e p r n s v n t h w t e e e t e e s o h s } e a o n t r l s o h a d F n y. i lt x e i t i l n l n l o me e o s o h f ci n s ft i v
Frt temoin a d poet n mo es o a r n b ad o AV r sa l h d An h n b s d o h i l h t n rjci d l fc mea o o fU s y, o o r ae e tbi e . d te ae n te s
法, 以独立确定 固定翼无人机在着陆 时的姿 态和相对着 陆点的位置。首先 , 了机载摄像机 的运动 和投 建立 影模型 ; 然后 , 利用着陆场上任意 3条 已知 自然直线特征 , 依据对应 线标定法建 立关于 无人机 姿;; 相对 峦和
位置的约束方程 , 以进行 无人机 姿态和相对位置的解算 ; 最后 , 进行 了地 面静态模拟 实验 , 实验结 果表 明 :
LI Xi g h a U n . u ,CAO Yun f n 。 S .e g HEN un 1n Ch .i
,
( . olg f tma o n iern , aj gU ies yo eo a t s& A to a t sNaj g2 0 1 , hn ; 1 C l eo o t nE gn eig N ni nvri f rn ui e Au i n t A c srn ui , ni 10 6 C ia c n 2 A a e fF ni cec , a j gU ie i fA rn u c & A to a t sNaj g2 0 1 , ia . c dmyo r t rS ine N ni nvr t o eo a t o e n s y i s srn ui , ni 10 6 Chn ) c n
me h d a d ts e ut h w i i c u ae t t i t o e t s l s o sa c r t owi n3% i a h a i o a sain a d3 n e c i o tt n. n r s t h n e c xs f rn l t n 。i a h a s f oa i t o x r o a d t i meh d ma e h e t fn t r l h r ce O t a t smoe p a t a l h h s a es e il n n h s t o k st e b s a u a a a tr S t r r c i b et a t o e t t h p ca o c s h ii c n h t ma - ma e ln i g t g t a e n e e . d a dn a es r e d d r Ke r s U a dn ;v so — a e a i ain;o e tt n& p st n a i rt n o o e p n i g l e y wo d : AV ln i g iin b s d n v g t o i r n ai o o i o ;c l a i fc r s o dn n s i b o i