步进电机的工作原理
步进电机的工作原理
优选步进电机的工作原理
步进电动机的工作原理与特点
原理:步进电机是利用电磁铁原理,将脉冲信号
转换成线位移或角位移的电机。每来一个 电脉冲,电机转动一个角度,带动机械移 动一小段距离。
特点:(1)来一个脉冲,转一个步距角。
(2)控制脉冲频率,可控制电机转速。 (3)改变脉冲顺序,改变转动方向。 (4)角位移量或线位移量与电脉冲数成正比.
系称为矩频特性
特点:
步进电动机矩频特性
下降曲线。以最 大负载转矩(启 动转矩)Tq为起 点,随着控制脉 冲频率增加,步 进电动机的转速 逐步升高、而带 负载能力却下降
A
B'
C'
C
B
A'
B相通电,转子2、4齿 和B相轴线对齐,相对 A相通电位置转30;
A
B'
C'
C
B
A'
C相通电再转30
这种工作方式,因三相绕组中每次只有一相通电, 而且,一个循环周期共包括三个脉冲,所以称三相 单三拍。
三相单三拍的特点:
(1)每来一个电脉冲,转子转过 30。此角称为
步距角,用S表示。
步进电机的种类:
通常按励磁方式分为三大类: 1)反应式:转子无绕组,定转子开小齿、步距小。应 用最广。 2)永磁式:转子的极数=每相定子极数,不开小齿, 步距角较大,力矩较大。 3)感应子式(混合式): 开小齿,混合反应式与永磁 式优点:转矩大、动态性能好、步距角小。
以反应式为例说明步进电机的结构和原理
(2)转子的旋转方向取决于三相线圈通电的顺序, 改变通电顺序即可改变转向。
二、三相单双六拍
三相绕组的通电顺序为: AABBBCCCAA 共六拍。
步进电机的驱动原理
步进电机的驱动原理
步进电机的驱动原理可以通过以下几点来解释:
1. 电磁驱动:步进电机内部通常包含多个线圈,每个线圈都有一对电极。
通过交替通电来激励这些线圈,可以产生磁场。
这个磁场与固定磁铁或其他线圈的磁场相互作用,从而使电机转动。
2. 步进角度:步进电机的转动一般是围绕其轴心以一定的步进角度进行的。
这个步进角度是由电机的结构和驱动信号决定的。
常见的步进角度有1.8度、0.9度、0.72度等。
通过适当的电
流驱动和控制信号,可以实现电机按照这些角度进行准确的转动。
3. 控制信号:步进电机一般需要外部的电流驱动器或控制器来提供适当的电流和控制信号。
这些控制信号通常是脉冲信号,通过改变脉冲的频率、宽度和方向,可以控制电机的转动速度和方向。
4. 开环控制:步进电机的控制通常是开环控制,即没有反馈回路来监测电机的实际位置和速度。
控制信号是基于预先设定的脉冲数目和频率来驱动电机的。
因此,步进电机在运行过程中可能存在累积误差,特别是在高速运动或长时间运行的情况下。
总而言之,步进电机的驱动原理是通过控制电流、改变磁场以及控制信号的脉冲,实现电机按照设定的步进角度进行准确转动的过程。
步进马达工作原理
步进电机工作原理步进电机是一种将电脉冲信号转化为机械转动的电动机。
它具有精确的位置控制、高转矩和快速响应的特点,被广泛应用于自动化控制系统中。
步进电机的工作原理基于磁场与电流之间的相互作用。
它由一个或多个定子线圈和一个旋转的转子组成,通过控制定子线圈通电和断电来实现精确的旋转运动。
1. 简介步进电机可以分为两种类型:永磁式步进电机和混合式步进电机。
永磁式步进电机由一个旋转的永磁体和一组定子线圈组成,通过改变定子线圈中的电流方向来控制旋转方向。
混合式步进电机结合了永磁式和可变磁阻式两种原理,具有更高的分辨率和更大的扭矩。
2. 工作原理步进电机通过在定子线圈中施加脉冲信号来实现旋转运动。
每个脉冲信号使得定子线圈中产生一个特定的磁场方向,这个磁场将与转子上的磁场相互作用,从而产生转矩。
步进电机的转子上通常有一组磁极,每个极对应一个角度。
当脉冲信号施加在定子线圈上时,定子线圈中的电流会在磁铁中产生一个特定的磁场。
这个磁场与转子上的磁极相互作用,使得转子旋转到一个新的角度。
3. 步进角和步进模式步进电机的旋转是按照一定的角度进行的,这个角度称为步进角。
步进角取决于步进电机的结构和驱动方式。
常见的步进电机有1.8度、0.9度和0.45度等。
步进电机可以以不同的方式工作,称为步进模式。
常见的步进模式有全步进模式(Full Step)、半步进模式(Half Step)和微步进模式(Microstep)等。
在全步进模式下,每个脉冲信号使得转子旋转一个完整的步进角;在半步进模式下,每个脉冲信号使得转子旋转半个步进角;在微步进模式下,每个脉冲信号使得转子旋转一个更小的角度。
4. 驱动电路步进电机需要一个驱动电路来控制定子线圈的通断。
常见的驱动电路有双极性和单极性两种。
双极性驱动电路使用H桥电路来实现正反转。
它通过控制四个开关的状态来改变定子线圈中的电流方向,从而控制旋转方向。
双极性驱动电路简单可靠,适用于大多数步进电机。
步进电机工作原理总结
步进电机工作原理总结
步进电机是一种将电信号转化为机械转动的设备。
它的工作原理可以总结为以下几点:
1. 电磁原理:步进电机是一种电磁装置,由绕组和磁铁组成。
当通过绕组通以电流时,绕组会产生电磁场,与磁铁相互作用,从而产生力和转矩。
2. 磁性原理:步进电机的转子通常由多个磁片或磁块组成,每个磁片或磁块都具有多个极对(通常是两个)。
3. 步进原理:通过改变绕组的电流方向和大小,可以改变磁铁的磁极方向和磁场强度。
当绕组的电流脉冲信号按照一定模式改变时,可以使得磁场的极性和位置发生变化,从而带动转子进行步进运动。
4. 控制原理:步进电机通常需要由控制器或驱动器来提供精确的脉冲信号,以控制电机的转动。
通过改变脉冲信号的频率、宽度和相位,可以控制步进电机的转速、方向和位置。
综上所述,步进电机的工作原理是通过改变电流和磁场的方式,实现电能到机械能的转换,从而实现精确的转动控制。
它广泛应用于各种需要精准定位和控制的领域,如工业自动化、机械设备和电子仪器等。
步进电机的工作原理
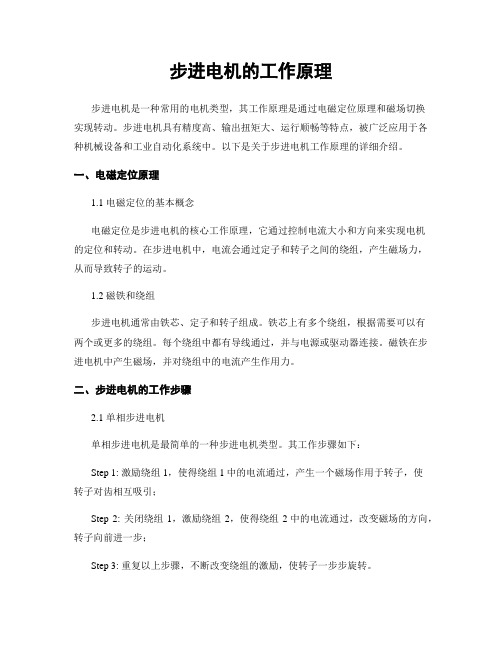
步进电机的工作原理步进电机是一种常用的电机类型,其工作原理是通过电磁定位原理和磁场切换实现转动。
步进电机具有精度高、输出扭矩大、运行顺畅等特点,被广泛应用于各种机械设备和工业自动化系统中。
以下是关于步进电机工作原理的详细介绍。
一、电磁定位原理1.1 电磁定位的基本概念电磁定位是步进电机的核心工作原理,它通过控制电流大小和方向来实现电机的定位和转动。
在步进电机中,电流会通过定子和转子之间的绕组,产生磁场力,从而导致转子的运动。
1.2 磁铁和绕组步进电机通常由铁芯、定子和转子组成。
铁芯上有多个绕组,根据需要可以有两个或更多的绕组。
每个绕组中都有导线通过,并与电源或驱动器连接。
磁铁在步进电机中产生磁场,并对绕组中的电流产生作用力。
二、步进电机的工作步骤2.1 单相步进电机单相步进电机是最简单的一种步进电机类型。
其工作步骤如下:Step 1: 激励绕组1,使得绕组1中的电流通过,产生一个磁场作用于转子,使转子对齿相互吸引;Step 2: 关闭绕组1,激励绕组2,使得绕组2中的电流通过,改变磁场的方向,转子向前进一步;Step 3: 重复以上步骤,不断改变绕组的激励,使转子一步步旋转。
2.2 双相步进电机双相步进电机相对于单相步进电机而言,在工作步骤上更复杂一些。
其工作步骤如下:Step 1: 激励绕组A,使得绕组A中的电流通过,产生一个磁场作用于转子,使转子对齿相互吸引;Step 2: 关闭绕组A,激励绕组B,使得绕组B中的电流通过,改变磁场的方向,转子向前进一步;Step 3: 同时激励绕组A和绕组B,使得两个绕组中的电流通过,产生一个磁场,转子继续向前进一步;Step 4: 关闭绕组B,继续激励绕组A,使得绕组A中的电流通过,改变磁场的方向,转子继续向前进一步;Step 5: 重复以上步骤,依次改变绕组的激励,使转子一步步旋转。
三、步进电机的驱动方法3.1 单相驱动单相驱动是最简单的步进电机驱动方法,它只需要通过控制绕组的电流来实现转子的转动。
步进电机的原理
步进电机的原理
步进电机是一种通过电信号控制转子按一定步长运动的电机。
其工作原理是将电信号转化为磁场,进而驱动转子。
步进电机通常由定子和转子组成。
定子含有若干绕组,每个绕组在电流作用下产生磁场。
转子上有多对永磁体,其磁极数目与定子绕组数目相一致。
当给定子绕组通电时,会在定子上产生磁场,这个磁场会吸引转子上的永磁体,使转子翻转一定的角度。
通过改变定子绕组通电的顺序和时间,可以控制转子按一定步长顺时针或逆时针旋转。
步进电机一般由驱动器和控制器配合使用。
驱动器将控制器发送的电信号转换为合适的电流和电压,以驱动步进电机。
控制器根据需要设定转子运动的步长和方向,并发出相应的电信号给驱动器。
步进电机具有精准定位、运动平稳等特点,适用于需要精确控制位置和转速的设备。
它被广泛应用于打印机、数控设备、机器人、电子仪器等领域。
步进电机工作原理
步进电机工作原理步进电机是一种常见的电机类型,具有精准的定位和旋转控制能力。
它适用于各种应用领域,如打印机、数控机床、机器人等。
本文将介绍步进电机的工作原理,从电机结构到控制方式进行详细描述。
一、电机结构与原理步进电机由定子和转子组成。
定子是由电磁线圈和磁铁组成的,而转子是由多个磁性极对组成的。
当电流通过定子线圈时,将会产生一个旋转磁场。
转子中的磁性极对会受到这个磁场的作用,从而实现旋转运动。
电机的旋转是通过按照一定的步进角度进行控制的。
步进角度是指每一次控制电机旋转所需的最小角度。
常见的步进角度有1.8度和0.9度。
步进角度越小,电机的旋转分辨率越高。
二、工作原理步进电机有两种基本的工作方式:全步进和半步进。
下面将分别介绍这两种工作方式的原理。
1. 全步进工作方式全步进工作方式是指每一次控制电机旋转一个步进角度。
控制电机旋转的方式有两种:单相励磁和双相励磁。
单相励磁是指在每一次步进中,只有一个定子线圈被激活,产生一个旋转磁场。
通过依次激活不同的定子线圈,可以使电机旋转。
双相励磁是指在每一次步进中,有两个定子线圈被同时激活,分别产生两个旋转磁场。
通过依次激活不同的定子线圈组合,可以使电机旋转。
2. 半步进工作方式半步进工作方式是指每一次控制电机旋转半个步进角度。
在半步进工作方式下,电机可以通过改变励磁的方式来实现更精确的控制。
半步进工作方式可以通过以下步骤来实现:1) 单相励磁:激活一个定子线圈,旋转一个步进角度。
2) 双相励磁:激活两个定子线圈,旋转一个步进角度。
3) 单相反向励磁:激活一个定子线圈,旋转一个步进角度。
4) 双相反向励磁:激活两个定子线圈,旋转一个步进角度。
通过以上步骤轮流执行,可以实现电机的半步进控制。
三、控制方式步进电机的控制方式通常有两种:开环控制和闭环控制。
开环控制是最常见的控制方式,即根据需要旋转的步进角度依次激活相应的定子线圈。
这种控制方式简单、成本低,但在运动精度和速度响应上有一定的限制。
步进电机的工作原理是什么-步进电机如何按照结构进行分类-
步进电机的工作原理是什么?步进电机如何按照结构进行分类?一、步进电机工作原理步进电机驱动器根据外来的控制脉冲和方向信号,通过其内部的逻辑电路,控制步进电机的绕组以一定的时序正向或反向通电,使得电机正向/反向旋转,或者锁定。
以1.8度两相步进电机为例:当两相绕组都通电励磁时,电机输出轴将静止并锁定位置。
在额定电流下使电机保持锁定的最大力矩为保持力矩。
如果其中一相绕组的电流发生了变向,则电机将顺着一个既定方向旋转一步(1.8度)。
同理,如果是另外一项绕组的电流发生了变向,则电机将顺着与前者相反的方向旋转一步( 1.8度)。
当通过线圈绕组的电流按顺序依次变向励磁时,则电机会顺着既定的方向实现连续旋转步进,运行精度非常高。
对于1.8度两相步进电机旋转一周需200步。
两相步进电机有两种绕组形式:双极性和单极性。
双极性电机每相上只有一个绕组线圈,电机连续旋转时电流要在同一线圈内依次变向励磁,驱动电路设计上需要八个电子开关进行顺序切换。
单极性电机每相上有两个极性相反的绕组线圈,电机连续旋转时只要交替对同一相上的两个绕组线圈进行通电励磁。
驱动电路设计上只需要四个电子开关。
在双极性驱动模式下,因为每相的绕组线圈为100%励磁,所以双极性驱动模式下电机的输出力矩比单极性驱动模式下提高了约40%。
二、步进电机如何按结构分类步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。
每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。
因此,步进电动机又称脉冲电动机。
步进电机从其结构形式上可分为反应式步进电机(VariableReluctance,VR)、永磁式步进电机PermanentMagnet,PM)、混合式步进电机(HybridStepping,HS)、单相步进电机、平面步进电机等多种类型,在我国所采用的步进电机中以反应式步进电机为主。
步进电机的运行性能与控制方式有密切的关系,步进电机控制系统从其控制方式来看,可以分为三类:开环控制系统、闭环控制系统、半闭环控制系统。
步进电机的工作原理
步进电机的工作原理步进电机是一种常见的电动机,广泛应用于各种机械和自动化设备中。
它以其精准的控制和高度可靠性而受到青睐。
本文将介绍步进电机的基本原理和工作方式。
1. 基本工作原理步进电机是一种将电能转换为机械能的设备,通过电磁原理实现驱动。
其基本构造包括定子与转子。
定子通常由两种或多种电磁线圈组成,这些线圈按照特定的顺序被激活。
转子则是由一组磁体组成,以使定子磁电流激活时能产生磁通。
2. 单相步进电机单相步进电机也称为单相混合式步进电机。
它具有两个电磁线圈,相位差为90度。
当线圈被激活时,会产生磁场。
根据磁场的相互作用,电机转子就可以旋转到一个新的位置。
单相步进电机的工作原理是通过改变线圈通电的顺序来控制运动。
3. 双相步进电机双相步进电机是一种更为常见的类型,它具有四个电磁线圈,相位差为90度。
每个线圈都可以单独激活,控制电机的运动。
在双相步进电机中,每次只有两个线圈被激活,以产生磁场。
通过交替激活不同的线圈,可以实现电机的旋转。
双相步进电机具有较高的转矩和精确的位置控制能力。
4. 步进电机的特点步进电机具有以下几个特点:4.1 准确定位:通过激活特定的线圈顺序,步进电机可以以特定的角度准确旋转,从而实现准确定位。
4.2 高度可编程:步进电机通过控制电流和脉冲的频率来控制转动速度和转动方向。
4.3 高度精密:由于线圈的激活顺序可以精确控制,步进电机可以实现非常精确的运动。
4.4 无需反馈系统:相比其他类型的电机,步进电机无需附加的位置反馈系统即可实现精确控制。
5. 应用领域由于其精准的控制和高度可靠性,步进电机在许多领域得到广泛应用,包括:5.1 3D打印机:步进电机用于控制打印头在XYZ轴上的位置,从而实现精确的打印。
5.2 CNC机床:步进电机用于控制刀具的位置和转动角度,从而实现自动化的数控加工。
5.3 机器人:步进电机用于控制机器人的运动,包括旋转和定位。
5.4 线性驱动器:步进电机也可以应用于线性驱动器,实现对物体位置的精确控制。
步进电机工作原理
步进电机工作原理步进电机的工作就是步进转动,其功用是将脉冲电信号变换为相应的角位移或是直线位移,就是给一个脉冲信号,电动机转动一个角度或是前进一步。
步进电机的角位移量与脉冲数成正比,它的转速与脉冲频率(f)成正比,如两相步进电机设定为半步的情况下(电机转一圈400个脉冲): n=60f/200(转/分)反应式步进电机的概念:反应式步进电机的定子铁心由硅钢片叠成,定子上有几对磁极(相数不同,磁极对也不同。
如四相电机有四对八个磁极),每个磁极上又有许多小齿。
定子绕组绕在径向相对的两个磁极上的一套绕组为一相。
转子也是由叠片铁心构成,沿圆周也有许多小齿,转子上没有绕组。
反应式步进电机的工作原理是利用凸极转子横轴磁阻与直轴磁阻之差所引起的反应力矩而转动。
实际应用中对步进电机的要求:1、步进电机在电脉冲的控制下能迅速起动、正反转、停转及在很宽的范围内进行转速调节;2、加工精度高,即要求一个脉冲对应的位移量小,并要准确、均匀。
这就要求步进电机步距小,步距精度高,不得丢步或是过冲;3、动作快速。
即不仅起动、停步、反转快,并能连续高速运转以提高劳动生产率;4、输出转矩大,可直接带动负载。
步进电机的基本特点:1、步进电动机工作时每相绕组不是恒定地通电,而是按一定的规律轮流通电。
2、每输入一个脉冲电信号转子转过的角度称为步距角。
3、步进电机可以按特定指令进行角度控制,也可以进行速度控制。
角度控制时,每输入一个脉冲,定子绕组就换接一次,输出轴就转过一个角度,其步数与脉冲数一致,输出轴转动的角位移量与输入脉冲成正比。
速度控制时,步进电机绕组中送入的是连续脉冲,各相绕组不断地轮流通电,步进电机连续动转,它的转速与脉冲频率成正比。
改变通电顺序,即改变定子磁场旋转方向,就可以控制电机正转或是反转。
4、步进电机具有自锁能力。
当控制脉冲停止输入,而让最后一个脉冲控制的绕组继续通直流电时,则电机可以保持在固定的位置上,即停在最后一个脉冲控制的角位移的终点位置上,这样,步进电机可以实现停车时转子定位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. 步进电机的工作原理
该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式
步进电机工作原理示意图。
图1 四相步进电机步进示意图
开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的4号齿就和C、D相
绕组磁极产生错齿,2、5号齿就和D
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c 所示:
a. 单四拍
b. 双四拍 c八拍
51单片机驱动步进电机的方法。
驱动电压12V,步进角为7.5度 . 一圈360 度, 需要48 个脉冲完成!!!
该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、5:黄色、6:黑色。
采用51驱动ULN2003的方法进行驱动。
ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。