Aurix芯片PWM应用
pwm 芯片

pwm 芯片PWM(脉冲宽度调制)芯片是一种用于生成可调节脉冲宽度的电子芯片。
它是一种广泛应用于自动控制和电子调节的集成电路,用于控制电平和电流,以实现对电机、灯光、音频等设备的调节和控制。
PWM芯片是工业控制系统中的关键部件,主要用于调节电平或电流。
通过调节脉冲的宽度和周期,可以控制被控设备的输出效果。
PWM芯片可以将输入信号转换为脉冲信号,进而通过控制开关管的开关时间来调节设备的工作状态。
PWM芯片的工作原理是通过调节信号的占空比来控制输出电平或电流。
占空比是指信号高电平时间与一个周期的比值。
当占空比越大,输出电平或电流越高,反之亦然。
PWM芯片通常会内置一个可调节的时钟,以便通过改变时钟频率来改变脉冲的周期。
PWM芯片具备以下主要特点:1. 高精度控制:PWM芯片可以实现微调电平或电流的控制,具有高精度和稳定性。
通过调节占空比,可以精确地控制输出信号的幅值。
2. 高效能节能:PWM芯片能够实现高效的能量转换,通过调节脉冲信号的宽度,可以降低能耗,提高能量利用率。
3. 宽电压范围:PWM芯片通常能支持广泛的工作电压范围,从几伏特到数十伏特不等。
这使得它们适用于各种不同的应用场景。
4. 兼容性强:PWM芯片通常支持多种不同的输出接口,可以与各种外部设备进行连接,实现灵活的控制方案。
5. 集成度高:PWM芯片通常采用集成电路的形式,内置了多种控制功能和保护功能,减少了外部元器件的使用,提高了系统的稳定性和可靠性。
在实际应用中,PWM芯片被广泛应用于各种领域,包括电机控制、照明调光、音频处理、电源管理等。
它们提供了一种灵活、高效的方式来实现对设备的精确控制和调节。
无论是工业自动化还是消费类电子产品,PWM芯片都发挥着重要的作用,为各种应用场景带来了更高的性能和可靠性。
飞思卡尔应用笔记之PWM

作者:盛多铮单位:安徽师范大学电子信息工程系寒假的时候开始接触9S12XS128这款片子,并在寒假掌握了codewarrior开发环境的基本使用和SCI模块串口收发方面的编程。
新学期一开始由于一直在忙着另外一个采集方面的课题,所以飞思卡尔的学习进展不是很快,今天看了PWM模块和PIT模块的相关资料,并自己写了一些小小的程序,在示波器上看到了理想的波形,所以趁着今晚有空,将这方面的学习感悟总结一下,在自我总结的同时,也希望给你的学习带来一些帮助,所谓赠人玫瑰,手留余香呵呵。
废话不多说,进入正题PWM模块9S12XS128共有8个独立的可编程的PWM通道,可配置成8个8位或4个16位的PWM 通道,共有4个时钟源,可软件设置对齐方式和极性,这里所谓的极性就是说PWM一开始输出的是高电平还是低电平。
下面就我们常用的寄存器作简单介绍(因为别的寄存器我也没用到呵呵。
)1、PWM Enable Register(PWME)PWME[7:0]分别控制着对应的8个通道的使能,例如:PWME_PWME0=0:禁止通道0的PWM输出PWME_PWME7=1: 使能通道7的PWM输出2、PWM Polarity Register(PWMPOL)ZAPWMPOL寄存器是用来控制PWM一开始输出时的信号高低情况,假如PPOLX设为1,则与之相应的PWM通道在开始的时候输出为高电平,然后等到计数器的值与你设置的那个PWM信号的值(PWMDTYx)相等的时候就输出低电平。
PPOL的值为0的时候正好与这相反。
3、PWM Clock Select Register(PWM 时钟选择)PWMCLK寄存器是用来设置每个通道的参考时钟源的,每个通道都有2个时钟源,具体的为CLOCK A,CLOCK SA(0,1,4,5);CLOCK B,CLOCK SB(2,3,6,7),例如:PWMCLK_PCLK0=0;则通道0选择CLOCK A作为时钟源PWMCLK_PCLK6=1;则通道6选择CLOCK SB作为参考时钟源4、PWM Prescale Clock Select Regisrer(PWMPRCLK)PWMPRCLK的第3位和第7位没有定义,低三位用来设置CLOCK A的分频,4-6位则设置CLOCK B的分频,以CLOCK A为例,具体值的计算如下表:假如说,外部晶振为12M,SYNR为1,REFDV的值为0,则总线时钟为24M,然后你将PWMPRCLK设为0x03,那么你这个CLOCK A的频率就为3M5、PWM Center Align Enable Register(PWMCAE)PWMCAE寄存器用来设置每个通道的对齐方式,CAEx为0时,设置相应的通道为左对齐,CAEx为1时,设置相应的通道为中心对齐,例如:PWMCAE_PCAE=0,则通道0设置为左对齐,那么左对齐和中心对齐有什么不同呢,别急,这个等讲到PWMDTYx和PWMPERx这两个寄存器后要好解释一点。
pwm的芯片

pwm的芯片PWM芯片是一种用于产生脉冲宽度调制(PWM)信号的集成电路。
它可以根据输入信号的频率,调整输出信号的占空比,从而控制电路中的功率。
PWM芯片广泛应用于各种领域,例如电机控制、照明调光、音频处理等。
PWM芯片通常具有以下几个主要功能:1. 脉冲信号发生器:PWM芯片可以生成稳定的脉冲信号,并根据输入信号的频率进行调整。
通常,脉冲信号的高电平(占空比)可以通过调整PWM芯片内部的寄存器进行配置。
2. 输出驱动器:PWM芯片内部通常集成了输出驱动电路,可以直接驱动外部电路。
输出驱动器的特点是能够提供较大的输出电流和电压范围。
3. 输入接口:PWM芯片通常具有多种输入接口,可以接收外部信号进行控制。
常见的输入接口有模拟输入、数字输入、串行总线接口等。
4. 保护电路:PWM芯片通常内嵌了各种保护电路,以保护电路免受过流、过热、输入干扰等可能的危害。
这些保护电路可以有效提高电路的可靠性和稳定性。
PWM芯片在实际应用中具有多种优点:1. 高效能:通过调整占空比,PWM芯片可以实现高效能的电力传输。
相较于直流信号,PWM信号可以降低功耗,提高能量利用率。
2. 精确控制:PWM芯片具有高精度的占空比控制能力。
通过调整占空比,可以精确控制输出信号的波形特性,从而实现精确定时和精确功率控制。
3. 灵活性:PWM芯片具有灵活的输入接口,可以适应不同类型的输入信号,如模拟信号、数字信号等。
同时,PWM芯片可以通过软件或硬件配置的方式实现多种控制方式,满足多种应用需求。
4. 可靠性:PWM芯片通常内嵌了多种保护电路,以提高电路的可靠性和稳定性。
这些保护电路可以在电路发生异常情况时,保护芯片免受损坏,进一步延长其使用寿命。
总结起来,PWM芯片是一种在电路控制领域中广泛应用的集成电路。
它具有高效能、精确控制、灵活性和可靠性等特点。
随着技术的发展,PWM芯片已经在各个领域得到了广泛应用,并不断推动着电路控制技术的发展。
集成mos管和pwm的电源管理芯片
集成mos管和pwm的电源管理芯片电源管理芯片是现代电子设备中不可或缺的一部分,它起着调节供电电压、保护电路和延长电池寿命等重要作用。
其中,集成了MOS 管(金属氧化物半导体场效应管)和PWM(脉宽调制)技术的电源管理芯片更是具有出色的性能和广泛的应用前景。
MOS管是一种基于金属氧化物半导体材料制成的场效应管,在电子设备中常用于开关和放大电路。
它具有低电压驱动、高开关速度和低功耗等优势,可以有效提高电路的工作效率。
而PWM技术则是一种通过调节信号的脉冲宽度来控制输出电压或电流的方法,它能够实现精准的电压和电流调节,以及高效的能量转换。
集成了MOS管和PWM技术的电源管理芯片能够更好地满足电子设备的供电需求。
首先,通过MOS管的高开关速度和低功耗特性,电源管理芯片可以实现快速的开关操作,并减少能量损耗,提高电路的工作效率。
其次,PWM技术的应用使得电源管理芯片能够精确地控制输出电压和电流,以适应不同电子设备的需求。
这样一来,电源管理芯片可以有效保护电路,延长电池的使用寿命,并提高设备的稳定性和可靠性。
除了上述基本功能外,集成了MOS管和PWM技术的电源管理芯片还具有诸多其他特性。
例如,它可以实现电压和电流的动态调节,以应对设备在不同工作状态下的需求变化;它还可以提供过流、过压和过温等保护功能,保障电子设备的安全运行;此外,电源管理芯片还可以通过外部控制信号实现开关机、休眠和唤醒等功能,提高设备的智能化程度。
集成了MOS管和PWM技术的电源管理芯片在电子设备中具有重要的应用价值。
它通过优化供电电压、保护电路和延长电池寿命等功能,为电子设备的稳定运行提供了强大的支持。
未来,随着电子设备的不断发展和进步,集成了MOS管和PWM技术的电源管理芯片将会有更广阔的应用前景。
我们可以期待,这种先进的电源管理芯片将会为人们的生活带来更多便利和创新。
几种PWM控制方法

几种PWM控制方法PWM(脉宽调制)是一种广泛应用于电子设备中的控制方法,通过控制信号的脉冲宽度来改变电路或设备的输出功率。
以下是几种常见的PWM 控制方法:1.定频PWM控制定频PWM控制是一种简单而常见的PWM控制方法,通过将固定频率的脉冲信号与一个可变的占空比相乘来实现控制。
脉冲的高电平时间代表设备处于工作状态的时间比例,而低电平时间代表设备处于停止状态的时间比例。
定频PWM控制可通过调整脉冲的占空比来改变输出功率,但频率固定不变。
2.双边PWM控制双边PWM控制是一种可调节频率和占空比的PWM控制方法。
与定频PWM不同的是,双边PWM控制可以根据需求调整脉冲的频率和占空比。
通过改变脉冲的频率和占空比,可以获得较高的精度和更灵活的控制效果。
3.单脉冲宽度调制(SPWM)单脉冲宽度调制是一种通过调整脉冲宽度的PWM控制方法。
与常规PWM不同的是,SPWM控制中只有一个脉冲被发送,其宽度和位置可以根据需求进行调整。
SPWM控制常用于逆变器和交流驱动器等高精度要求的应用,可以实现比其他PWM控制方法更精确的波形控制。
4.多级PWM控制多级PWM控制是一种在多个层次上进行PWM调制的控制方法。
通过将一系列的PWM信号级联起来,每个PWM信号的频率和占空比不同,可以实现更高精度和更复杂的波形控制。
多级PWM控制常用于高性能电机驱动器、中央处理器(CPU)和功率放大器等需要高精度信号处理的应用。
5.空间矢量调制(SVPWM)空间矢量调制是一种通过调整电压矢量的方向和大小来实现PWM控制的方法。
SVPWM通过控制电压矢量之间的切换来生成输出波形,可以实现较高的电压和电流控制精度。
空间矢量调制常用于三相逆变器、电子制动器和无刷直流电机等高功率应用中,可以实现高质量的输出波形。
6.滑模PWM控制滑模PWM控制是一种通过添加滑模调节器来实现PWM控制的方法。
滑模调节器可以通过反馈控制来实现系统的快速响应和鲁棒性,从而实现更好的控制效果。
pwm芯片

pwm芯片PWM芯片(Pulse Width Modulation Chip)是一种电路集成芯片,用于生成脉冲宽度调制信号或方波信号。
在电子设备中广泛用于电源控制、电机控制、信号调制等领域。
PWM技术是通过改变脉冲的高电平和低电平的时间比例来实现调制。
通常情况下,周期固定,而脉冲的宽度通过调节PWM芯片的控制电压来改变。
脉冲宽度与输入控制电压成正比。
PWM芯片可以根据输入信号的特点,以一定的频率和占空比生成输出脉冲。
PWM芯片一般由时钟发生器、计数器、比较器、输出逻辑电路等模块组成。
时钟发生器产生一个固定频率的方波信号,计数器对方波信号进行计数,比较器将计数结果与控制电压进行比较判断,输出相应的PWM信号。
输出逻辑电路用于控制脉冲的高电平和低电平。
PWM芯片具有以下几个特点:1. 精准度高:由于采用数字控制的方式,PWM芯片具有较高的精度和稳定性。
可以通过调节控制电压来微调脉冲宽度,实现对输出信号的精确控制。
2. 高效率:由于脉冲宽度和频率可以灵活调节,PWM芯片在电源控制中具有较高的能量利用率。
通过调节脉冲宽度,可以有效地控制电源的输出功率,在保证正常工作的同时,降低能耗。
3. 适应性强:PWM芯片可以根据不同的应用需求进行调节,适应不同的工作环境和参数要求。
可以调节频率、占空比、脉宽等参数,满足不同设备的需求。
4. 可编程性强:现代PWM芯片具有较高的可编程性,可以通过软件或硬件进行调节。
可以实现自动控制、远程控制、模拟控制等功能。
5. 多功能性:PWM芯片不仅具有脉冲宽度调制功能,还可以实现方波信号的输出。
除了用于电源控制和电机控制,还广泛用于信号调制、通信传输等领域。
总的来说,PWM芯片是一种具有高精度、高效率、适应性强、可编程性强的集成电路。
在现代电子设备中得到广泛应用,为各种电路提供了可靠且灵活的信号调制功能。
PWM(脉宽调制)的基本原理及其应用实例
PWM(脉宽调制)的基本原理及其应用实例脉宽调制(P ulse W idth M odulation)是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。
模拟电路模拟信号的值可以连续变化,其时间和幅度的分辨率都没有限制。
9V电池就是一种模拟器件,因为它的输出电压并不精确地等于9V,而是随时间发生变化,并可取任何实数值。
与此类似,从电池吸收的电流也不限定在一组可能的取值范围之内。
模拟信号与数字信号的区别在于后者的取值通常只能属于预先确定的可能取值集合之内,例如在{0V, 5V}这一集合中取值。
模拟电压和电流可直接用来进行控制,如对汽车收音机的音量进行控制。
在简单的模拟收音机中,音量旋钮被连接到一个可变电阻。
拧动旋钮时,电阻值变大或变小;流经这个电阻的电流也随之增加或减少,从而改变了驱动扬声器的电流值,使音量相应变大或变小。
与收音机一样,模拟电路的输出与输入成线性比例。
尽管模拟控制看起来可能直观而简单,但它并不总是非常经济或可行的。
其中一点就是,模拟电路容易随时间漂移,因而难以调节。
能够解决这个问题的精密模拟电路可能非常庞大、笨重(如老式的家庭立体声设备)和昂贵。
模拟电路还有可能严重发热,其功耗相对于工作元件两端电压与电流的乘积成正比。
模拟电路还可能对噪声很敏感,任何扰动或噪声都肯定会改变电流值的大小。
数字控制通过以数字方式控制模拟电路,可以大幅度降低系统的成本和功耗。
此外,许多微控制器和DSP已经在芯片上包含了PWM控制器,这使数字控制的实现变得更加容易了。
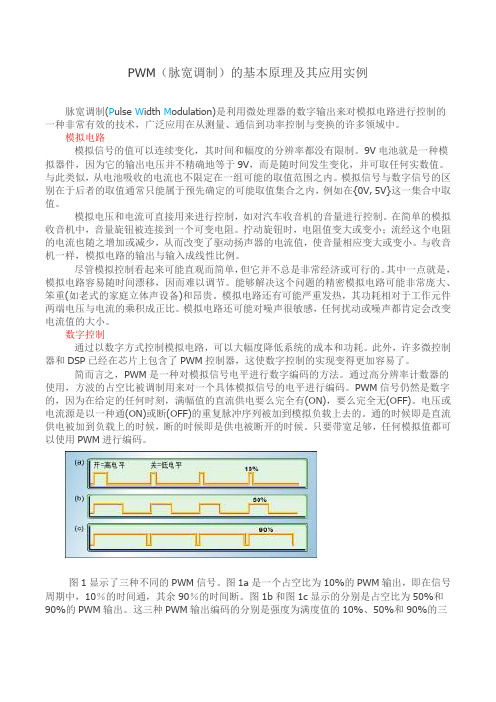
简而言之,PWM是一种对模拟信号电平进行数字编码的方法。
通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。
PWM信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。
电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。
常用pwm控制芯片及电路工作原理

常用pwm控制芯片及电路工作原理常用PWM控制芯片及电路工作原理一、引言脉宽调制(PWM)是一种常用的电子技术,用于控制电子设备的输出信号的占空比。
常见的PWM控制芯片和电路广泛应用于各个领域,如电机驱动、LED亮度控制、音频放大等。
本文将介绍几种常用的PWM控制芯片及其工作原理。
二、常用PWM控制芯片和电路1. NE555NE555是一种经典的PWM控制芯片,被广泛应用于各种电子设备。
其工作原理基于一个比较器和一个RS触发器构成的控制电路。
NE555通过调节电阻和电容的值,可以实现不同的调制周期和占空比。
2. ArduinoArduino是一种开源的单片机平台,它内置了PWM功能,可以通过编程来控制输出的PWM信号。
Arduino的PWM输出信号是通过改变数字输出引脚的电平和占空比来实现的。
通过编写代码,可以轻松地控制PWM信号的频率和占空比。
3. 555定时器与MOS管这种PWM控制电路的原理是利用NE555定时器和MOS管组成的开关电路。
NE555定时器负责产生固定频率的方波信号,而MOS管则根据方波信号的占空比进行开关控制。
通过调节NE555的电阻和电容值,可以实现不同的PWM频率和占空比。
4. 软件PWM软件PWM是通过编程实现的一种PWM控制方式,主要用于一些资源有限的单片机系统。
它通过周期性地改变输出引脚的电平和占空比来模拟PWM信号。
软件PWM的实现原理是使用定时器中断来触发状态改变,并通过软件计数器来控制占空比。
三、PWM控制原理PWM控制的基本原理是通过改变信号的占空比来控制输出的平均功率。
占空比是指PWM信号高电平的时间与一个周期的比值。
例如,如果一个PWM信号周期为1ms,高电平时间为0.5ms,则占空比为50%。
占空比越大,输出信号的平均功率越大。
PWM控制的工作原理是利用开关的方式,将输入电压分成若干个短时间段的高电平和低电平。
通过不同的高低电平时间比例,可以调节输出信号的平均功率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Aurix GTM PWM
1.GTM summarize
GTM module are designed as a general Timer module,flexible configurations are its characteristic. When configuration,there are still several modules should be noticed.
U(Infrastructural components)
2.CMU(Infrastructural components)
3.TOM (for PWM)
CCU涉及的文件:IfxScuCcu.c 有各类接口获取对应的时钟
CCU 不同的外设时钟源放置来自同一个时钟源,通过对应CCUCONx寄存器来配置不同外设,由图可以看到CGU的总来源可以是osc或backup。
而给GTM提供的源,通过查看PLLSTAT寄存器,看分频的情况。
关于CCU的设置在cStart启动部分IfxScuCcu_init
SRI总线———》200M
SPB外设总线————》100M
PLL——————》100M
现在各个频率都是用的默认值:
CMU provides several timers source.
根据系统时钟TSYS_CLK得到GTM时钟频率:
TCMU_GCLK_EN=( CMU_GCLK_NUM/CMU_GCLK_DEN)*TSYS_CLK
然后设定生成时钟信号源,有0~7总共8个源可以设置不同的频率,最后要开启PWM,
直接使能CMU即可,CLK_EN。
每个CMU_CLK[x]设置的频率对应寄存器为GTM_CMU_CLK_x_CTRL (x=0-5)
6和7用的单独的两个
其中PWM的产生使用TOM这个模块
TOM提供单独的16个通道,每一个出单独的PWM,输出引脚TOM[i]_CH[x]_OUT,其中
i={0,1},x={0~15}
实际配置也是按上图从左至右的设置,先设TGCx
关于TGC作为TOM的总控制器,主要有三个操作:
1、enable/disable channel
2、Output Enable
3、Force update
而这三个操作有三个触发源:
1、the host CPU (bit HOST_TRIG of register TOMi_TGCy_GLB_CTRL)
2、the TBU time stamp (signal TBU_TS0, TBU_TS1, TBU_TS2)
3、the internal trigger signal TRIG (bunch of trigger signals TRIG_[x]) (内部触发信号包括每个通道的触发TRIG_CCU0,TIM外部触发TIM_EXT_CAPTURE)
所以对于开启或停止PWM,可以通过TGCx模块直接配置enable/disable channel,来控制开启/停止。
可以通过外部触发、软件触发、内部通道触发TOM输出(每一项的死区时间通过DTM设
置)
Tom 通道
使用TOM之前,配置通道控制寄存器TOMi_CHx_CTRL
设置通道的时钟源——需要设置对应通道的CLK_SRC_SR位,
通过TRIGOUT位,设置那种触发源来更新pwm
SR0写入——》CM0 总周期
SR1写入——》CM1 占空比
寄存器《——读出CN0值计数器
TOM有两种模式:
TOM continuous mode
CN0自动+1,到M0清零
TOM One shot mode
一旦channel使能,CN0不+1
只有对CN0的写访问操作能触发CN0 加1
更新PWM的值分两种:
一、同步更新PWM 占空比值的过程:
1、disable 执行寄存器更新,操作寄存器UPEN_CTRL
2、在SR0、SR1、CLK_SRC写入新值
3、enable 执行寄存器的更新
可以看到每次SR的值改变,是在下一个周期体现。
二、异步更新PWM 占空比值
直接修改CM1的值,这样占空比的改变直接从当前周期开始
注意:在这种情况下使用时,需要完全disable同步更新机制。
需要获取通道源时钟频率,调用如下函数:
IfxGtm_Tom_Ch_getClockFrequency(driver->gtm,driver->tom,driver->timerChanne l);
设置的过程中,首先设置Timer ,再设置触发的部分,通过AD触发
TOM_TIMER_CONFIG_PWM是设置一个定时器,产生一个周期性的PWM波,通过IfxGtm_TOM0_7_TOUT93_P13_2_OUT引脚输出波形,这个PWM默认是一个占空比为50%的pwm,占整个周期,用来作为周期的参考波形。
PWM_CONFIG设置实际6路PWM,ccx是上桥三相,cout是下桥三相,实际上轮流配置或更新单个的PWM通道,死区也没有单独的寄存器,而是通过软件计算死区得到结果。
anyAligned TOM_TIMER_CONFIG_PWM_INT专门作为中断的定时器,默认设置在周期中间触发PWM中断,现在没有开启中断。
TOM_TIMER_CONFIG_ADC0_TRIG、TOM_TIMER_CONFIG_ADC1_TRIG是两个专门建立的用于触发AD的定时器,因为所用的TIMER和之前的PWM共用,所以可以实现周期内任意位置触发AD的效果。
GTM作为主的时间模块,可以触发包括AD在内的各个其他模块。
所以在要设定PWM什么时刻触发AD时,需要设置GTM中的ADCTRIG0OUT0寄存器,感觉类似上表制定用那个通道触发哪路AD。
、
映射关系:
AD Groupx <-------------> TOMx + channel x。