现代信号课件第3章最优滤波
[PPT课件]现代信号处理-维纳和卡尔曼滤波
![[PPT课件]现代信号处理-维纳和卡尔曼滤波](https://img.taocdn.com/s3/m/ee37c56427d3240c8447ef41.png)
2.2 维纳滤波器的离散形式——时域解
2.2.2 维纳—霍夫方程
把k的取值代入(2.2.9)式, 得到:
当k=0时,h1rxx(0)+h2rxx(1)+…+hMrxx(M-1)=rxd(0) k=1时, h1rxx(1)+ h2rxx(0)+…+ hMrxx(M-2)= rxd(+1)
k=M-1时, h1rxx(M-1)+ h2rxx (M-2)+…+hMrxx(0)= rxd(M-1)
(2.2.10)
…
2.2 维纳滤波器的离散形式——时域解
2.2.2 维纳—霍夫方程 定义 T T h h1, h2 ,, hM , Rxd rxd (0), rxd (1),, rxd (M 1),
rxx (0) rxx (0) Rxx r ( M 1) xx
2.1 引 言
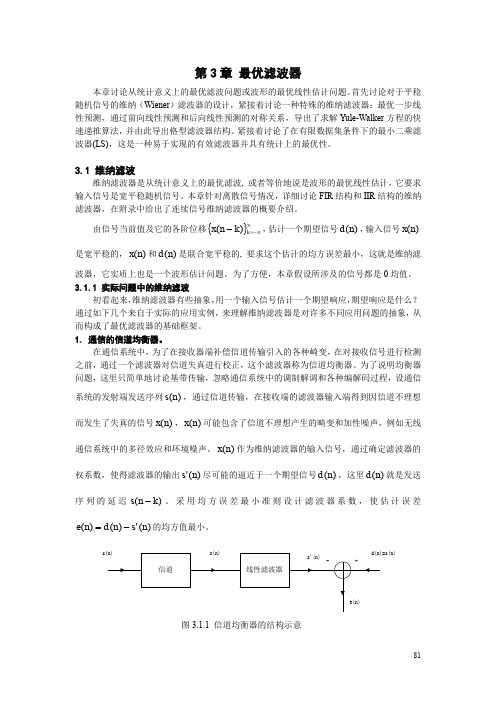
为了得到不含噪声的信号 s(n) ,也称为期望信号, 系统的期望输出用 yd(n)表示,yd(n)应等于信号的真值
若滤波系统的单位脉冲响应为 h(n) (如图 2.1.2 所示), s(n);系统的实际输出用y(n)表示,y(n)是s(n)的逼近或
估计,用公式表示为yd(n)=s(n), y(n) =
因此,维纳滤波器的传输函数H(z)的求解转化为 G(z)的求解。
x(n)
1 B( z)
(n )
G(z)
^ y(n)= s (n)
图 2.3.3 维纳滤波解题思路
2.3 离散维纳滤波器的Z域解
2.3.1 非因果维纳滤波器的求解
假设待求维纳滤波器的单位脉冲响应为 ω(n),期 望信号 d(n)=s(n) ,系统的输出信号 y(n)=s(n) , g(n) 是 G(z)的逆Z变换, 如图2.3.3所示。
现代信号分析与处理技术_第2讲_最优滤波方法
{
}
p −1 ⎧⎡ ⎤ ∗ ⎫ = E ⎨ ⎢ d (n) − ∑ w(l ) x(n − l ) ⎥ d (n) ⎬ l =0 ⎦ ⎩⎣ ⎭
即:
ξ min = rd (0) − ∑ w(l )r (l )
l =0
∗ dx
p −1
或:
H ξ min = rd (0) − rdx w
或:
H -1 ξ min = rd (0) − rdx Rx rdx
k =0
因此最优线性预测器的Wiener-Hopf方程为:
⎡ rx (0) rx∗ (1) rx∗ (2) ⎢ rx (1) rx (0) rx∗ (1) ⎢ rx (2) rx (1) rx (0) ⎢ ⎢ r ( p − 1) rx ( p − 2) rx ( p − 3) ⎣x rx ( p − 2) ⎥ ⎢ w(1) ⎥ ⎢ rx (2) ⎥ ∗ rx ( p − 3) ⎥ ⎢ w(2) ⎥ = ⎢ rx (3) ⎥ ⎥⎢ ⎥ ⎥ ⎢ ⎥ ⎢ w( p − 1) ⎥ ⎢ r ( p ) ⎥ rx (0) ⎦ ⎣ ⎦ ⎣x ⎦
信息科学与工程学院 杨绿溪
• 维纳滤波
FIR维纳滤波 应用:滤波、线性预测、噪声抑制、反卷积MMSE均衡器 IIR维纳滤波
• 线性离散卡尔曼滤波器
- - -高斯假设下的序贯贝叶斯滤波 • 非线性最优滤波-序贯MC贝叶斯滤波
• 基本的粒子滤波器应用实例
参考书和参考文献
• 杨绿溪,现代数字信号处理,科学出版社,2007年11月。 • 张贤达,现代信号处理,清华大学出版社,2002年10月。 • T.Kailath, A innovations approach to LS estimation, IEEE T-AC, Vo.13, 1968, pp.641-655. • M.S.Arulampalam, S.Maskell, N.Gordon, T.Clapp, A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking, IEEE Transactions on Signal Processing, Vol.50, No.2, pp.174-188, 2002. 专辑 • Z.Chen. Bayesian filtering: From Kalman filters to particle filters, and beyond. Adaptive system lab., Macmaster Univ., Canada. [online]. http://soma.crl.mamaster.ca/zhechen /download. 另有2004-03, P-IEEE专辑
《现代滤波技术》PPT课件

(4)
对上式进行 z 变换,得
再将 z=ejw 带入,得
4.4 维纳滤波和卡尔曼滤波
燕山大学电气工程学院
维纳-霍夫方程的物理解释:如果输入信号 x(n)是由源信号 s(n)和干 扰噪声 n(n)混和,并且 s(n)和 n(n)不相关,那么维纳滤波器的期望输 出就是源信号 s(n)本身,即 z(n)= s(n),则 x(n)的自相关函数和 z(n) 与 x(n)的互相关函数分别为
滤波器的形式仍然为线性滤波,因此输出信号 y(n)仍然为滤波器
的单位脉冲响应 h(n)和输入信号的卷积表示:
N1
y(n)w(m)x(nm) m0
其中 W最优值。
第三讲 数字滤波技术 3. 自适应滤波器的应用举例
自适应对消 自适应预测 自适应均衡 系统辨识与建模
很多信号处理场合存在相乘信号的情况,如衰落信号恢
复、调幅信号分解等,可采用解乘积同态滤波进行信号分离。
D□
L
D○-1
此系统对应的信号处理过程是: 原始信号:
D□: 表示为:
L:
D○-1
y (n)=exp[
1
] y (n)=exp[
2
]
3. 解卷积同态滤波
燕山大学电气工程学院
混响环境中的声音和通信信号、测试得到的地震信号等都
燕山大学电气工程学院
为实现对非加性组合信号 x1(t)和 x2(t)的分离,同态滤波 系统包括以下三个子系统:特征系统 D□(将信号按照规则 □变换为加性组合)、线性滤波 L 和特征系统 D○-1(将滤波 后信号按照规则○变换到原始空间),其变换特性分别为:
2. 解乘积同态滤波
燕山大学电气工程学院
表现为卷积性信号组合,采用解卷积同态滤波进行信号分离。
清华大学《现代信号处理》课件

现代信号处理(离散随机信号处理)电子工程系本课程要讨论的主要问题:(1)对信号特性的了解随机信号(随机过程,时间序列––随机过程的一个实现)信号模型→参数估计→现代谱估计:参数化谱估计讨论信号模型及模型参数的估计问题,比较参数谱估计方法和周期图方法的优劣。
(2)对统计意义下最优滤波器设计的研究平稳条件下:Wiener滤波器理论非平稳条件下:Kalman滤波理论上的目标,实际算法可达到的最佳结果(3)对环境的自适应,具备“学习能力”的滤波算法自适应均衡、波束形成、线性自适应滤波器(4)更多信息的利用,挖掘(针对非高斯问题)线性系统、功率谱:二阶矩,高斯过程的完全刻划非线性、多谱:高阶量,循环平稳(5)对时间(空间)–––频率关系的适应性:全局特性与局域特性,小波变换,时频分析信号处理算法设计面向的几个主要因素n信噪比n先验知识n雷达n通信系统n电子对抗n对先验知识的利用:统计基础上的假设、学习过程n算法复杂性与性能要求的匹配性一些进展中的课题盲自适应信号处理序列贝叶斯估计、粒子滤波阵列信号处理等等与信号处理紧密关联的学科人工神经网络统计学习理论模式识别等等教材n张旭东,陆明泉:离散随机信号处理,2005年10月,清华大学出版社主要参考书①S. Haykin, Adaptive Filter theory, Third Edition, Prentice-Hall, 1996,//Fouth Edition 2001 (电子工业出版社均有影印本)①S.M. Kay, Modern Spectral Estimation: Theory & Application,Prentice-Hall, 1988①S.M. Kay, Fundamentals of Statistical Signal Processing: Estimation Theory, Prentice Hall PTR, 1993.①S. Mallat, A Wavelet Tour of Signal Processing, Academic press, 1998,Second Edition 1999①扬福生, 小波变换的工程分析与应用, 科学出版社, 2000.① D. G. Manolakis, et,al. Statistical and Adaptive Signal Processing, Mcgraw-Hall, 2000.①J. G. Proakis, et al. Algorithms for Statistical Signal Processing, Prentice hall, 2002①张贤达现代信号处理第2版清华大学出版社课程成绩n平时作业10%n2个Matlab作业40%(布置后2周内提交)n期末开卷考试50%1.1随机信号基础被噪声干扰的初相位是随机值的正弦波信号本质上均是随机的,但将信号作为随机信号处理,还是做为确定信号处理,与我们的应用目标和我们的先验知识有关,一般地,我们总是选择对应用有利的处理方式。
现代数字信号处理(chap3 确定性最小二乘)(2012修订版)

V (h) 2qT h hT Rh
V (h)min 2q h h q
T T
Rh q
误差能量等于期望 输出信号能量-实际 输出信号能量
qT h hT Rh
n n
h(m)h(l ) g (k m) g (k l ) y 2 (k ) l 0 m 0 k k
T
q ( m ) g ( k ) f ( k m)
k 0
相关矢量
r (0) r (1) r (n) r (1) R r (1) r (n) r (1) r (0)
(n+1)(n+1)维的输 入自相关矩阵,第i 行第j列元素值为 r(|i-j|) Toeplitz矩阵
f ( k ) g ( k ) h( k )
j 2
1 V (h) 2
F (e
j
) G ( e ) H ( e ) d
j
帕斯瓦 尔定理
第一节 正则方程
最小二乘准则 (LS : Least-Square) 要求h(m)因 果、FIR
2 n 2
min V (h)
1
第一节 正则方程
V(h) e( k ) f ( k ) y(k ) f (k ) h(m) g (k m) k k k m0
2 2 n 2
V (h) 0 h(l )
k
min 1
期望输出与 输入不相关
y0 h0 , q0
输入与期望输出完全不相关。
f f
第3章3.6频率响应与理想滤波器.ppt

(3)x(t)为一般形式的周期信号
傅里叶级数x(t) cke jk0t k
应用叠加原理,系统响应
y(t) ck H (k0 )ejk0t k
可以看出,y(t)不仅是周期的, 而且与输入x(t)有相同的基波频率。
例3-18 已知某系统的频率响应函数H ()为 H () 1 1 j
求下列输入x(t)作用下的系统响应y(t)
解:(2)用指数函数表示正弦输入
x(t) cos(2t) 1 (e j2t e j2t ) 2
根据:单频周期信号x(t) ej0t
系统响应y(t) ej0t h(t) H () ej0t 0
由叠加性可得
y(t)
1 2
H
(2)e j2t
H
(2)e j2t
Re
H
(2)e
j2t
Re
1 1 j2
e
j2t
Re
1
j2 5
e
j2t
1 cos(2t) 2sin(2t)
5
3.6 频率响应函数与理想滤波器
信号传输的不失真条件
x(t) | X () | e j () x(t)
h(t) | H () | e j()
h(t)
y(t)
LTI
y(t) x(t) h(t) | X () || H () | e j () j()
即将 x(t)分解为无限个 (t)之叠加
y (t )
x(t )
h(t )
t
0
x
h
t
d
即零状态响应分解为所有被激励加权的h(t)之叠加
时域方法缺点:计算复杂。
2.频域分析法(是变换域分析法的一种)
x(t) X () H ( j) Y () y(t)
P_第3章-最优滤波.
T
(3.1.1)
最小。 当滤波器系数有无穷多个 (即单位抽样响应无限长) 时, 对应 IIR 结构的维纳滤波器, 当滤波器系数为有限个时,对应 FIR 结构的维纳滤波器。FIR 结构的维纳滤波器的滤波部 分的示意图如图 3.4 所示,在信号处理的文献中,也常称这个结构为横向滤波器。
x(n)
x(n-1)
1)
从维纳滤波器是线性贝叶斯波形估计的观点,需注意如下几点: 在均方误差意义上,维纳滤波器是线性 FIR 滤波器中的最优滤波器,但可能存在一些 非线性滤波器能达到更好结果。 在 x(n) 和 d (n) 是联合高斯分布条件下,维纳滤波也是总体最优的,不存在非线性滤波 器能达到更好的结果。 从线性贝叶斯估计推导过程知,在滤波器系数取非最优的任意权系数 w 时,其误差性 能表达式为
2 T J ( w) d w T rxd rxd w w T Rw
2)
3)
(3.1.13)
84
它是 w 的超二次曲面,只有一个最小点,当 w w o 时, J ( w) J min 。
3.1.2 维纳滤波:正交原理
维纳滤波器是一个最优线性滤波器,图 3.1.3 是一个一般表示框图,滤波器核是 IIR 或 FIR 的,在实信号情况下,已经导出了求解 FIR 型维纳滤波器的方程。在第 2 章讨论了线 性最优估计的正交性原理, 第 2 章正交原理是由最优线性估计方程导出的。 在最优线性滤波 器理论中,正交原理是一个基本分析工具,由正交原理出发,很容易导出线性最优估计和维 纳 滤波器的方程式。由于正交原理应用的广泛性和简洁性,并且贯穿于平稳、非平稳和有 限数据等多种情况,在本节,对复信号的一般情况,重新导出正交原理的一般形式,并利用 正交原理, 重新推导复信号情况下维纳滤波器的一般方程。 先推导适应于 IIR 和 FIR 的一般 结论,然后分别讨论 FIR 和 IIR。 将一般的复数形式维纳滤波器的问题重新描述如下。 设输入随机过程 x(n) 为复信号,由 x(n k )k 估计期望响应 d (n) ,求复数权系数
清华现代信号课件第3章最优滤波.ppt
2020/2/5
信号处理
2020/2/5
信号处理
2020/2/5
信号处理
·反Levinson-Durbin算法
2020/2/5
信号处理
2020/2/5
信号处理
Cholesky分解
2020/2/5
信号处理
2020/2/5
信号处理
Cholesky分解的结论
2020/2/5
信号处理
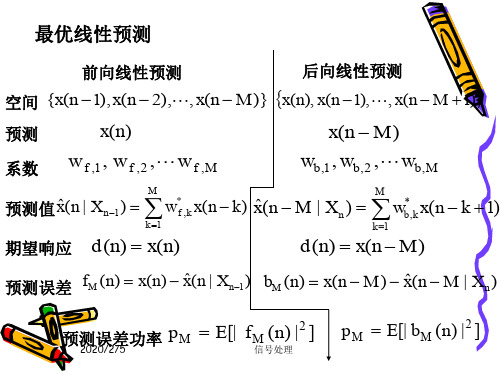
前向线性预测误差滤波器与AR模型的关系
AR(M)模型下
M
x(n) ak* x(n k) v(n) k 1
比较 ak* aM* ,k v(n) f M (n)
2020/2/5
信号处理
Levinson-Durbin算法
从m-1阶出发,对正向预测有 将系数矩阵增广
pm1
0*mm11
pm1
(正向)+(反向2)×km
Rm1
a
m1
0
km
a
0
B* m1
pm1 0m1 m1
k
m
*m1 0m1 pm1
R 1
可以分解成一个上三角矩阵和下三角矩阵之积, 它们是互为转置
2020/2/5
信号处理
格型预测器
2020/2/5
信号处理
2020/2/5
信号处理
M
证明
fm(n) Biblioteka a* m,kx(n
k
)
k 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
最优滤波的评述 Wiener滤波、Kalman滤波的最优性限制 高斯、非高斯问题 序列蒙特卡罗方法,粒子滤波等
.
37
Kalman滤波
.
1
标量随机过程的递推MMSE估计
.
2
新息序列的特性:
.
3
.
4
.
5
.
6
矢量Kalman滤波
目标:离散时间线性动力系统状态估计 模型:Kalman滤波的模型如图所示
v1(n) x(n+1) Z-1I
x(n)
C(n)
F(n+1,n)
.
y(n)
v2(n)
7
.
8
.
9
.
10
y(n)
x(n1) 0,
0,
1
v(n) 0
x(n)
ap,
ap1
a1
x(n1)
1
x (n 1 ) A x (n ) v 1 (n )
.
13
.
14
Kalman滤波器推导
.
15
2.几个常用不相关公
.
16
.
17
.
18
.
19
.
20
.
21
.
22
5.Kalman增益
.
23
.
24
Q 1 (n ) 0 y (n ) u H (n )x (n ) v (n ) C (n ) u H (n )
Ev(n)v(k) 1 0
Q 2 (n ) 1
nk
nk
.
36
由这个模型出发,得到一组简化的Kalman方程,它在数学上 与自适应滤波器的RLS算法一一对应, 由此,建立了Kalman 滤波与RLS之间的联系,任河一种Kalman滤波的有效算法都可 以对应得到一种RLS的实现,由此借助Kalman滤波领域的研究 成果,得到一组快速自适应滤波算法. (Sayed , Kailath, 1994)
状态方程
卡尔曼滤波
xˆ (i | Yn )
.
11
例:一个AR(p)过程
p
x(n)akx(nk)v(n)
பைடு நூலகம்
k1
令
x(n p)
x
(n
1)
x(n
p
1)
x(n 1)
.
12
得到状态方程
x(np1) 0, 1, 0 0 x(np) 0
x(np2) 0, 0, 1, 0, 0x(np1) 0
6.Riccati方程(K(n,n-1)的递推公式)
.
25
.
26
.
27
.
28
.
29
.
30
Kalman预测的跟踪性能
.
31
增益的变化曲线
.
32
Kalman滤波器的一些推广简述
.
33
.
34
.
35
4.特殊结构(无激励动力系统)
x (n 1 ) 1 /2 x (n ) F (n 1 ,n ) 1 /2 I