PID仿真图
化工工艺PID识图 ppt课件
(中浩60万吨甲醇PID图纸为例) 一、什么是工艺PID图 PID又称为管道和仪表流程图,是Piping and Instrumentation Diagram 的缩写。PID的设计是在工艺流程图(PFD:Process Flowsheet Diagram)的基础上完成的。它是工程设计中从工艺流程到工程施工设计的 重要工序,是装置设计安装的基本依据。 工程的设计,从工艺包、基础设计到详细设计中的大部分阶段,PID都 是工艺及工艺系统专业的设计中心,其他专业(设备、仪表、电气、自控、 管道、土建、安全等)都在为实现P&ID里的设计要求而工作。
ppt课件
22
a.两个设备的进口检测温度分别为Ti-1501与Ti-1108,他们都有仪表分程控制虚线,分别 由两个调节阀来控制,如Ti-1501温度由TV-1501A与TV-1501B来控制,Ti-1108温度由TV1108与TV-1501A来控制;
b.当TV-1501A接收到控制器TiC-1501与TiC-1108两个信号阀位时,按照低选(<)运算, 选择阀位小的去动作TV-1501A; c.两个控制器的分程原则是先关A阀再开B阀,如控制器TiC-1501是把阀TV-1501A关到最小 后再开TV-1501B,控制器TiC-1108是把阀TV-1501A关到最小后再开TV-1108; d.如进原料天然气脱硫预热(E-304)的温度设定控制在380度,如果检测温度为385度,由 控制器发出信号要求减少进脱硫预热器(E-102/1)天然气气量,则控制阀TV-1501A先行 关小,如果TV-1501A关至最小时而检测温度仍然没有降至380,调节阀TV-1501B开始开大, 增加E-102旁路气量,直到温度降到380度,如果温度低于380度,反之则先关小旁路TV1501B,然后再开大TV-1501A直到温度控制在380度; e.如进超精脱硫槽温度设定在225度,如果检测温度为230度,由控制器发出信号要求减少 进脱硫预热器(E-102/1)天然气气量,则控制阀TV-1501A先行关小,如果TV-1501A关至 最小时而检测温度仍然没有降至225,调节阀TV-1108开始开大,增加E-102/2冷却气量, 从而降低热介质温度直到温度降到225度,如果温度低于225度,反之则先关小旁路TV1108,然后再开大TV-1501A直到温度控制在225度;
PID控制算法及MATLAB仿真分析

题目:以PID控制进行系统仿真学院自动化学院专业班级工业自动化111班学生姓名黄熙晴目录1 引言 (1)1.1本论文研究内容 (1)2 PID控制算法 (1)2.1模拟PID控制算法 (1)2.2数字式PID控制算法 (3)2.3PID控制算法的改进 (5)2.3.1微分项的改进 (5)2.3.2积分项的改进 (9)2.4模糊PID控制算法 (11)2.4.1模糊推理的系统结构 (12)2.4.2 PID参数在线整定原则 (12)2.5PID控制器研究面临的主要问题 .................................. 错误!未定义书签。
3 MATLAB编程和仿真 (13)3.1PID控制算法分析 (13)3.2MATLAB仿真 (15)4结语 (20)参考文献...................................................................................... 错误!未定义书签。
1 引言PID控制器以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
光学表面等离子共振生物传感技术受温度影响很大,因此设计高精度的温度控制器对于生物分析仪十分重要。
研究PID的控制算法是PID控制器整定参数优化和设定的关键技术之一。
在工业过程控制中,目前采用最多的控制方式依然是PID方式。
它具有容易实现、控制效果好、鲁棒性强等特点,同时它原理简单,参数物理意义明确,理论分析体系完整,并为工程界所熟悉,因而在工业过程控制中得到了广泛应用。
在实际的应用中,许多被控过程机理复杂,具有高度非线性、时变不确定性和纯滞后等特点,特别是在噪声、负载扰动等因素的影响下,参数复杂烦琐的整定过程一直困扰着工程技术人员。
为了减少参数整定的工作量,克服因环境变化或扰动作用造成系统性能的降低,就要提出一种PID控制参数的自动整定。
1.2本论文研究内容本文在介绍传统的PID控制算法,并对传统算法改进后,在学习的基础上提出一种模糊参数自整定方法,这种模糊控制的PID算法必须精确地确定对象模型。
AMB系统变参数PID控制仿真

现了参数数据库模块 , 并建立 了单 自由度磁悬浮
轴 承模 型 闭环 系统 的仿 真框 图 , 图 3所示 。 如
图4 磁悬浮 系统的阶跃响应 由图 4可知 , P I 线代 表 的是 使 用 变 参 数 V PD
PD 控 制器 的 系统 阶跃 响 应 曲 线 , 有 振 荡 过 程 I 而 的 PD 线 代 表 的是 经 典 PD 的 阶 跃 响 应 曲 线 。 I I 由图 4可 以看 出 , 用 变 参数 PD 控 制 器 的 系统 使 I 的超调量 、 节 时 间、 升 时 间 均 明显 好 于 经 典 调 上
F = 一
问题 。变 参数 PD 是 经 典 PD 的改 进 版 , 可 I I 它
以实现参 数 的实 时调 整 , 系统 获 得 比较好 的控 使
由式 ( ) 4 和式 ( ) 得 . 9可 K i (O 1)
一
制 效果 , 原理 如图 2所示 。 其
l. ,1
.
第 2期
谈 浩 楠 , 大军 , 姜 张建 生 : MB 系统变 参数 PD 控制 仿真 A I
域 内对 系 统 进 行 黍 勒 展 开 以 略 去 高 次 项 。
1 9
对 式 ( 0 进行 线性 化处 理 便 可得 : 1)
一
△
2 ,
同理 可得 :
) =(
y )+L ) =£d X 。 1 Zi
0
(6 1)
由式 ( ) 3 和式 ( ) 4 可得 :
di
“ y
Hale Waihona Puke 一 将 式 (3 、 (4 代 入式 ( ) 1 )式 1 ) 5 可得 :
肌 L 一 d K t ( 7 1)
pid工艺流程图的画法ppt课件
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
设备的画法与标注
管道流程线的表示
PID图需掌握的知识点
阀门等管件的表示方法
仪表控制的画法
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
管道及仪表流程图上的管子、管件、阀门及管道附件的图例
名称
主要物料管道
辅助物料及公用系 统管道
原有管道
可折短管
蒸汽伴热管道
电伴热管道
柔性管 翅片管
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
某丙烯酸甲酯装置局部工艺原则流程图
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
工艺原则流程图通常采用按工艺流程顺序, 自左至右展开图的形式表示,设备以示意 的图形或符号表示(表7-2),并用细实线 画出,流程图中的主要物料流程的流程线 用粗实线表示,流程方向用箭头画在流程 线上。
当物料经过设备产生变化时,可在流程的 起始部分和物料产生组分变化的设备之后, 在流程线上用指引线引出并列表标注(指 引线及表格线皆用细实线绘制)。标注出 物料变化前后各组分的名称、流量、质量 分数或摩尔分数和每项的总和数等(标注 项目可按需要酌量增减)。
模糊pidmatlab(simulink)仿真详细步骤
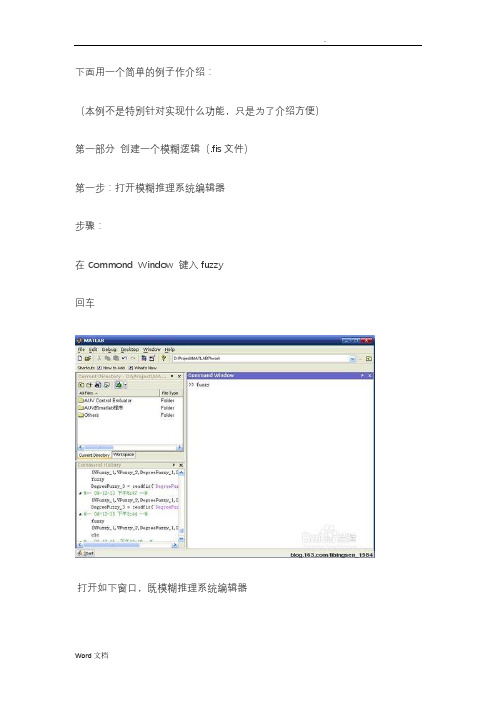
下面用一个简单的例子作介绍:(本例不是特别针对实现什么功能,只是为了介绍方便)第一部分创建一个模糊逻辑(.fis文件)第一步:打开模糊推理系统编辑器步骤:在Commond Window 键入fuzzy回车打开如下窗口,既模糊推理系统编辑器第二步:使用模糊推理系统编辑器本例用到两个输入,两个输出,但默认是一个输人,一个输出步骤:1、添加一个输入添加一个输出得如下图2、选择Input、output(选中为红框),在Name框里修改各输入的名称并将And method 改为prod,将Or method 改为probor提示:在命名时’_’在显示时为下标,可从上图看出。
第三步:使用隶属函数编辑器该编辑器提供一个友好的人机图形交互环境,用来设计和修改模糊推理系中各语言变量对应的隶属度函数的相关参数,如隶属度函数的形状、范围、论域大小等,系统提供的隶属度函数有三角、梯形、高斯形、钟形等,也可用户自行定义。
步骤:1、双击任何一个输入量(In_x、In_y)或输出量打开隶属度函数编辑器。
2、在左下处Range和Display Range处添加取值范围,本例中In_x和In_y的取值范围均为[0 10], Out_x和Out_y的取值范围均为[0 1]3、默认每个输入输出参数中都只有3个隶属度函数,本例中每个输入输出参数都需要用到五个,其余几个需要自己添加:选中其中一个输入输出参数点击Edit菜单,选Add MFS…打开下列对话框将MF type设置为trimf(三角形隶属度函数曲线,当然你也需要选择其他类型) 将Number of MFs设置为2点击OK按钮同样给其他三个加入隶属度函数4、选中任何一个隶属度函数(选中为红色),在Name中键入名称,在Type 中选择形状,在Params中键入范围,然后回车如下图:5、关闭隶属函数编辑器第四步:使用规则编辑器通过隶规则编辑器来设计和修改“IF...THEN”形式的模糊控制规则。
S7-1200的被控仿真对象PID自整定过程
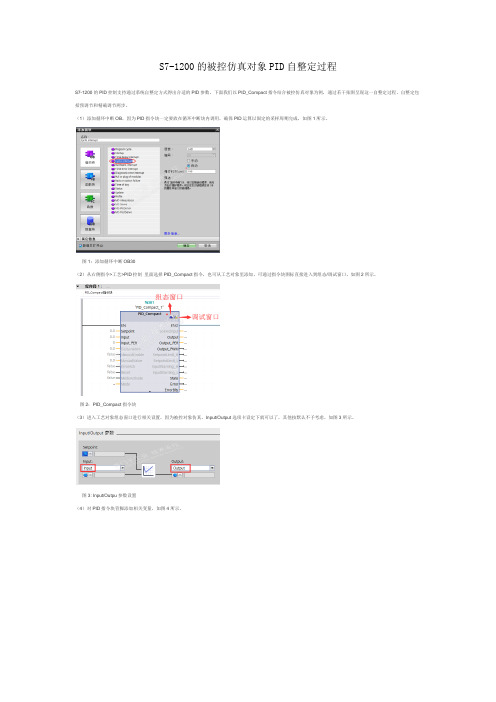
S7-1200的被控仿真对象PID自整定过程S7-1200的PID控制支持通过系统自整定方式得出合适的PID参数,下面我们以PID_Compact指令结合被控仿真对象为例,通过若干张图呈现这一自整定过程,自整定包括预调节和精确调节两步。
(1)添加循环中断OB,因为PID指令块一定要放在循环中断块内调用,确保PID运算以固定的采样周期完成,如图1所示。
图1:添加循环中断OB30(2)从右侧指令>工艺>PID控制里面选择PID_Compact指令,也可从工艺对象里添加,可通过指令块图标直接进入到组态/调试窗口,如图2所示。
图2:PID_Compact指令块(3)进入工艺对象组态窗口进行相关设置,因为被控对象仿真,Input/Output选项卡设定下就可以了,其他按默认不予考虑,如图3所示。
图3: Input/Outpu参数设置(4)对PID指令块管脚添加相关变量,如图4所示。
图4:给PID指令块管脚添加变量(5)从全局库添加PID被控对象仿真块到循环OB中,该仿真块可以从西门子全球技术资源下载,条目号79047704,如图5所示。
图5:调用被控对象仿真块(6)PID的输出值作为被控仿真对象的输入,被控仿真对象的输出作为PID的反馈值,如图6所示。
图6:被控对象仿真块管脚变量(7)下载程序到PLC并进入调试(自整定)界面,先启动测量,此时预调节条件还未满足,如图7所示。
图7:进入到工艺对象PID调试面板(8)满足预调节主要条件1:设定值-当前值>(过程值上限-过程值下限)×30%,设定值-当前值>设定值×50%,如图8所示。
图8:修改设定值来满足预调节条件(9)满足预调节主要条件2,PID必须处于“未激活”、“手动”、或“自动”模式,如图9所示。
图9:PID已在手动模式(10)启动预调节,如图10所示。
图10:预调节开始(11)预调节结束并上传参数,如图11所示。
pid画图培训(2024)

挑战应对
面对未来复杂多变的应用场景和需求,我们需要不断学习和掌握新的技术和方法,如深度学习、强化学习等,以 应对PID控制面临的挑战。同时,我们也需要注重实践经验的积累和总结,不断提高自己的解决问题的能力。
2024/1/24
26
2024/1/24
谢谢聆听
27
3
PID控制器组成与工作原理
01
比例环节(P)
根据偏差的大小进行成比例调节,快速减小偏差。
2024/1/24
02
积分环节(I)
对偏差进行积分,消除静差,提高控制精度。
03
微分环节(D)
预测偏差变化趋势,提前进行调节,提高系统响应速度 。
4
传递函数与数学模型
2024/1/24
传递函数
描述系统动态特性的数学表达式 ,反映输入与输出之间的关系。
运行仿真
配置好仿真参数后,点击运行按钮开始仿真,观察PID 控制器的性能表现。
保存与导出
完成绘图后,选择“文件”菜单中的“保存”选项保存 图形文件;如需导出为其他格式(如PDF、图片等), 可选择“导出”功能进行转换。
10
03 图形绘制技巧与规范
2024/1/24
11
坐标系设置及参数调整方法
2024/1/24
2024/1/24
问题分析 分析压力控制系统中存在的问题 和挑战,如压力波动、控制精度 不足等。
PID图优化 详细阐述PID图的优化过程,包 括控制器参数的调整、控制策略 的优化等,以及优化后的PID图 结构和元素。
21
流量控制系统PID图应用举例
应用背景
介绍流量控制系统的应用 场景和PID控制在流量控 制中的应用。
建立二阶振荡环节数学模型
PID控制PID控制系统的分析与设计PPT教程
PID控制器的表达式
❖ PID控制器的传递函数
仍然参照图1,对PID的时域表达式进行拉普拉斯变换,可得
Gc (s)
E(s) U(s)
Kp
Ki s
Kds
Kp
1
1 Ti s
Tds
于是可得几种控制方案的控制器传递函数分别为
比例(P)控制器 Gc(s) Kp
比例积分(PI)控制器
Gc(s)
系统仿真与MATLAB PID控制系统的分析与设计
一个简单PID控制的实例
冲热水淋浴,假定冷水龙头开度保持不变,只调节热水
❖ 比例关系 根据具体的龙头和水压,温度高一度,热水需要关小一定的量,
比如说,关小一格。换句话说,控制量和控制偏差成比例关系, 偏差越大,控制量越大
控制偏差就是实际测量值和设定值或目标值之差。在比例控制规
N
式中,N→∞时,则为纯微分运算。实际中,N不必过大,一般
N=10,就可以逼近实际的微分效果。
PID参数对控制性能的影响
❖ PID参数对控制性能的影响
PID控制器的Kp,Ti,Td三个参数的大小决定了PID控制器的比例、
积分、微分控制作用的强弱
下面举例分别分析Kp,Ti,Td三个参数中一个参数发生变化而另两
PID参数对控制性能的影响
❖ 积分时间常数Ti对控制性能的影响
积分作用的强弱取决于积分常数Ti。Ti越小,积分作用就越强,
反之Ti大则积分作用弱。
积分控制的主要作用是改善系统的稳态性能,消除系统的稳态误
差。当系统存在控制误差时,积分控制就进行,直至无差,积分 调节停止,积分控制输出一常值
加入积分控制可使得系统的相对稳定性变差
step(Gc);