2017全国大学生数学建模竞赛D题解析
2017年 中国研究生 数学建模 竞赛D题

2017年中国研究生数学建模竞赛D题基于监控视频的前景目标提取视频监控是中国安防产业中最为重要的信息获取手段。
随着“平安城市”建设的顺利开展,各地普遍安装监控摄像头,利用大范围监控视频的信息,应对安防等领域存在的问题。
近年来,中国各省市县乡的摄像头数目呈现井喷式增长,大量企业、部门甚至实现了监控视频的全方位覆盖。
如北京、上海、杭州监控摄像头分布密度约分别为71、158、130个/平方公里,摄像头数量分别达到115万、100万、40万,为我们提供了丰富、海量的监控视频信息。
目前,监控视频信息的自动处理与预测在信息科学、计算机视觉、机器学习、模式识别等多个领域中受到极大的关注。
而如何有效、快速抽取出监控视频中的前景目标信息,是其中非常重要而基础的问题[1-6]。
这一问题的难度在于,需要有效分离出移动前景目标的视频往往具有复杂、多变、动态的背景[7,8]。
这一技术往往能够对一般的视频处理任务提供有效的辅助。
以筛选与跟踪夜晚时罪犯这一应用为例:若能够预先提取视频前景目标,判断出哪些视频并未包含移动前景目标,并事先从公安人员的辨识范围中排除;而对于剩下包含了移动目标的视频,只需辨识排除了背景干扰的纯粹前景,对比度显著,肉眼更易辨识。
因此,这一技术已被广泛应用于视频目标追踪,城市交通检测,长时场景监测,视频动作捕捉,视频压缩等应用中。
1下面简单介绍一下视频的存储格式与基本操作方法。
一个视频由很多帧的图片构成,当逐帧播放这些图片时,类似放电影形成连续动态的视频效果。
从数学表达上来看,存储于计算机中的视频,可理解为一个3维数据X∈ℝw×h×t,其中w,h代表视频帧的长,宽,t代表视频帧的帧数。
视频也可等价理解为逐帧图片的集合,即X={ℝ1,ℝ2,⋯,ℝℝ},其中ℝℝ∈ℝw×h(ℝ=1,2,⋯,t)为一张长宽分别为w,h的图片。
3维矩阵的每个元素(代表各帧灰度图上每个像素的明暗程度)为0到255之间的某一个值,越接近0,像素越黑暗;越接近255,像素越明亮。
高教社杯全国大学生数学建模竞赛题目(四套ABCD)
高教社杯全国大学生数学建模竞赛题目(四套ABCD)当我第一遍读一本好书的时候,我仿佛觉得找到了一个朋友;当我再一次读这本书的时候,仿佛又和老朋友重逢。
我们要把读书当作一种乐趣,并自觉把读书和学习结合起来,做到博览、精思、熟读,更好地指导自己的学习,让自己不断成长。
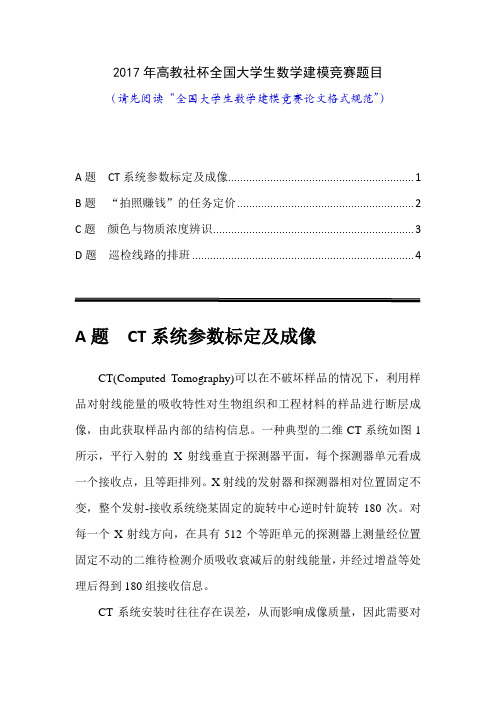
让我们一起到店铺一起学习吧!2017年高教社杯全国大学生数学建模竞赛题目A题 CT系统参数标定及成像CT(Computed T omography)可以在不破坏样品的情况下,利用样品对射线能量的吸收特性对生物组织和工程材料的样品进行断层成像,由此获取样品内部的结构信息。
一种典型的二维CT系统如图1所示,平行入射的X射线垂直于探测器平面,每个探测器单元看成一个接收点,且等距排列。
X射线的发射器和探测器相对位置固定不变,整个发射-接收系统绕某固定的旋转中心逆时针旋转180次。
对每一个X射线方向,在具有512个等距单元的探测器上测量经位置固定不动的二维待检测介质吸收衰减后的射线能量,并经过增益等处理后得到180组接收信息。
CT系统安装时往往存在误差,从而影响成像质量,因此需要对安装好的CT系统进行参数标定,即借助于已知结构的样品(称为模板)标定CT系统的参数,并据此对未知结构的样品进行成像。
请建立相应的数学模型和算法,解决以下问题:(1) 在正方形托盘上放置两个均匀固体介质组成的标定模板,模板的几何信息如图2所示,相应的数据文件见附件1,其中每一点的数值反映了该点的吸收强度,这里称为“吸收率”。
对应于该模板的接收信息见附件2。
请根据这一模板及其接收信息,确定CT系统旋转中心在正方形托盘中的位置、探测器单元之间的距离以及该CT系统使用的X射线的180个方向。
(2) 附件3是利用上述CT系统得到的某未知介质的接收信息。
利用(1)中得到的标定参数,确定该未知介质在正方形托盘中的位置、几何形状和吸收率等信息。
另外,请具体给出图3所给的10个位置处的吸收率,相应的数据文件见附件4。
2017年数学建模d题讲解

2017年数学建模d题讲解
2017年的数学建模D题是一个关于城市停车管理的问题。
该题目要求参赛者设计一个数学模型来优化城市停车管理系统,以减少交通拥堵和提高停车效率。
具体来说,题目包括以下几个方面:
1. 问题背景,介绍了城市停车管理系统的现状和存在的问题,例如停车位不足、交通拥堵等。
2. 问题提出,明确了需要解决的问题,比如如何合理分配停车资源、如何减少车辆在城市中的空转时间等。
3. 数据分析,提供了相关的停车数据,包括停车位数量、停车需求量、车辆流量等,要求参赛者对这些数据进行分析。
4. 模型建立,要求参赛者建立数学模型,可以是基于排队论、优化算法、仿真模拟等方法,来解决停车管理的问题。
5. 模型求解,要求参赛者利用建立的数学模型对现实问题进行求解,并给出相应的优化方案。
6. 结果分析,参赛者需要对模型的结果进行分析,评价模型的有效性和实用性,讨论模型的局限性和改进空间。
总的来说,2017年数学建模D题是一个涉及实际城市交通管理问题的综合性题目,要求参赛者结合数学建模理论和实际数据进行综合分析和求解。
针对这个题目,参赛者需要从数学建模的角度出发,结合实际情况,从停车资源的合理分配、车辆流量的优化、交通拥堵的缓解等多个角度进行全面的分析和求解。
希望这个回答能够帮助你更好地理解2017年数学建模D题的内容。
2017数学建模优秀论文d题方面的
2017数学建模优秀论文d题方面的数学建模就是学习如何把物理的复杂的世界用适当的数学语言描述出来,进而用数学的手段对模型加以分析,然后再用所得结论回归现实,指导实践。
下文是店铺为大家搜集整理的关于2017数学建模优秀论文的内容,欢迎大家阅读参考!2017数学建模优秀论文篇1浅谈大学生数学建模的意义【摘要】本文重点分析了数学建模对当前数学教育教学改革的现实意义,探讨了数学建模对学生应用数学能力的培养,阐述了计算机在数学建模竞赛中的作用和地位,最后介绍了数学建模对数学教学改革的启示意义。
【关键词】数学建模;综合素质;教学改革长期以来,我国的数学教学中一直普遍存在着重结论而轻过程、重形式而轻内容、重解法而轻应用等弊端,不注重学生数学能力和素质的培养;过分强调对定义、定理、法则、公式等知识的灌输与讲授,不注重这些知识的应用,割断了理论与实际的联系,造成学与用的严重脱节,致使在我们的数学教育体制下培养出来的学生的能力结构都形成了一种严重的病态,主要表现在:数学理论知识掌握得还可以,但应用知识的能力很差,不能学以致用,缺乏创造力和解决实际问题的能力,这些问题使我们的学生在走向工作岗位时上手速度慢,面对新的数学问题时束手无策,不能将所学的知识灵活运用到实际中去。
显然,这种教育体制和理念与现代教育理念是背道而驰的,是必须抛弃的。
开展数学建模教学或数学建模竞赛,能够培养学生各方面的综合能力,提高学生的综合素质,对于当前数学教育教学改革有着极为重要的现实意义。
1 数学建模能够丰富和优化学生的知识结构,开拓学生的视野数学建模所涉及到的许多问题都超出了学生所学的专业,例如“基金的最佳适用”、“会议筹备”、“地震搜索”等许多建模问题,分别属于不同的学科与专业,为了解决这些问题,学生必须查阅和学习与该问题相关的专业书籍和科技资料,了解这些专业的相关知识,从而软化或削弱了目前教育中僵死的专业界限,使学生掌握宽广而扎实的基础知识,使他们不断拓宽分析问题、解决问题的思路,朝着复合型人才和具备全面综合素质人才的方向发展。
大学生数学建模竞赛题目ABCD
2017年高教社杯全国大学生数学建模竞赛题目(请先阅读“全国大学生数学建模竞赛论文格式规范”)A题CT系统参数标定及成像 (1)B题“拍照赚钱”的任务定价 (2)C题颜色与物质浓度辨识 (3)D题巡检线路的排班 (4)A题CT系统参数标定及成像CT(Computed Tomography)可以在不破坏样品的情况下,利用样品对射线能量的吸收特性对生物组织和工程材料的样品进行断层成像,由此获取样品内部的结构信息。
一种典型的二维CT系统如图1所示,平行入射的X射线垂直于探测器平面,每个探测器单元看成一个接收点,且等距排列。
X射线的发射器和探测器相对位置固定不变,整个发射-接收系统绕某固定的旋转中心逆时针旋转180次。
对每一个X射线方向,在具有512个等距单元的探测器上测量经位置固定不动的二维待检测介质吸收衰减后的射线能量,并经过增益等处理后得到180组接收信息。
CT系统安装时往往存在误差,从而影响成像质量,因此需要对安装好的CT系统进行参数标定,即借助于已知结构的样品(称为模板)标定CT系统的参数,并据此对未知结构的样品进行成像。
请建立相应的数学模型和算法,解决以下问题:(1) 在正方形托盘上放置两个均匀固体介质组成的标定模板,模板的几何信息如图2所示,相应的数据文件见附件1,其中每一点的数值反映了该点的吸收强度,这里称为“吸收率”。
对应于该模板的接收信息见附件2。
请根据这一模板及其接收信息,确定CT系统旋转中心在正方形托盘中的位置、探测器单元之间的距离以及该CT系统使用的X射线的180个方向。
(2) 附件3是利用上述CT系统得到的某未知介质的接收信息。
利用(1)中得到的标定参数,确定该未知介质在正方形托盘中的位置、几何形状和吸收率等信息。
另外,请具体给出图3所给的10个位置处的吸收率,相应的数据文件见附件4。
(3) 附件5是利用上述CT系统得到的另一个未知介质的接收信息。
利用(1)中得到的标定参数,给出该未知介质的相关信息。
全国大学生数学建模竞赛D题解析
汇报人:
CONTENTS
PRT ONE
PRT TWO
竞赛名称:全国大学生数学建模竞 赛
竞赛目的:培养大学生数学建模能 力提高解决实际问题的能力
添加标题
添加标题
竞赛级别:国家级
添加标题
添加标题
竞赛影响:促进大学生数学建模技 术的发展选拔优秀人才
竞赛起始于XXXX年 每年举办一次 参赛对象为全国大学生 竞赛目的是提高大学生数学建模能力和科技创新能力
组建合适的团队分工明确
制定详细的计划合理安排时间
充分准备所需的知识和技能
准备阶段:研究 题目收集资料建 立模型
实施阶段:编程 实现模拟实验优 化模型
总结阶段:撰写 论文整理思路提 炼经验
反思阶段:总结 得失分析原因改 进策略
赛题分析:对竞赛题目进行深入剖析明确解题思路和要点 经验教训:总结竞赛过程中遇到的问题和不足提出改进措施 团队协作:评估团队成员在竞赛中的表现和贡献提出优化建议 未来规划:根据竞赛经验和教训制定个人和团队未来的学习和发展计划
模型验证:通过对比实际数据和模型预测结果对模型的准确性和可靠性进行评估和改进
数据清洗:去除异常值、缺失值和重复值 数据筛选:根据需求筛选有效数据 数据转换:对数据进行必要的转换以适应分析需求 数据可视化:通过图表、图像等形式直观展示数据
确定问题类型和目 标函数
确定算法的输入和 输出
设计算法的流程图 和伪代码
培养团队协作精神 提升大学生数学应用能力
促进学科交叉融合
为国家和社会培养创新型人 才
PRT THREE
题目背景:全国大学生数学建模竞赛D题 题目要求:分析D题所涉及的数学建模方法和技巧 题目内容:对D题进行解析包括问题分析、模型建立、求解过程等 题目难度:对D题的难度进行评估并给出解题建议
2017数学建模国赛B题
我们看到,价格定的越高,任务完成的概率就越大,������1增大,反映了任务完在于增加成本,此时������2也增加,因此,衡量定价绩效
的总体指标ω是这两者经过调整之后的差值:
ω = ������1 − ������2
此外,我们给出一个辅助的定价绩效的指标:区域会员参与度δ:
1
一、问题重述
“拍照赚钱”是移动互联网下的一种自助式服务模式。用户下载 APP,注册成为 APP 的 会员,然后从 APP 上领取需要拍照的任务(比如上超市去检查某种商品的上架情况),赚取 APP 对任务所标定的酬金。这种基于移动互联网的自助式劳务众包平台,为企业提供各种商 业检查和信息搜集,相比传统的市场调查方式可以大大节省调查成本,而且有效地保证了调 查数据真实性,缩短了调查的周期。因此 APP 成为该平台运行的核心,而 APP 中的任务定价 又是其核心要素。如果定价不合理,有的任务就会无人问津,而导致商品检查的失败。
不同价格区间执行率不同的问题,此时会员得到的报酬各处平均,因此不同位置定价的不同
将会导致相同的执行率。
6
10
8
6
4
2
0
60-65.5
65.5
65.5-70 70-75
75-80
>80
已完成项目数与未完成项目数之比
图 3 会员执行率与定价之间的关系 下面分析 APP 定价的因素:
图 4 未完成任务价格与分布情况
价格越高,放弃该任务的动机越低,由于价格已经远远高于平均成本,因此会员执行率大大
提高。因此存在一个较高的价格,高于此价格,会员基本都愿意执行。因此对于会员的选择
问题,可以看作一个随机变量,该变量由会员的位置与任务位置的相互关系来决定,同时受
2017数学建模高教杯全套

2017年高教社杯全国大学生数学建模竞赛题目(请先阅读“全国大学生数学建模竞赛论文格式规范”)A题CT系统参数标定及成像CT(Computed Tomography)可以在不破坏样品的情况下,利用样品对射线能量的吸收特性对生物组织和工程材料的样品进行断层成像,由此获取样品内部的结构信息。
一种典型的二维CT系统如图1所示,平行入射的X射线垂直于探测器平面,每个探测器单元看成一个接收点,且等距排列。
X射线的发射器和探测器相对位置固定不变,整个发射-接收系统绕某固定的旋转中心逆时针旋转180次。
对每一个X射线方向,在具有512个等距单元的探测器上测量经位置固定不动的二维待检测介质吸收衰减后的射线能量,并经过增益等处理后得到180组接收信息。
CT系统安装时往往存在误差,从而影响成像质量,因此需要对安装好的CT系统进行参数标定,即借助于已知结构的样品(称为模板)标定CT系统的参数,并据此对未知结构的样品进行成像。
请建立相应的数学模型和算法,解决以下问题:(1) 在正方形托盘上放置两个均匀固体介质组成的标定模板,模板的几何信息如图2所示,相应的数据文件见附件1,其中每一点的数值反映了该点的吸收强度,这里称为“吸收率”。
对应于该模板的接收信息见附件2。
请根据这一模板及其接收信息,确定CT系统旋转中心在正方形托盘中的位置、探测器单元之间的距离以及该CT系统使用的X射线的180个方向。
(2) 附件3是利用上述CT系统得到的某未知介质的接收信息。
利用(1)中得到的标定参数,确定该未知介质在正方形托盘中的位置、几何形状和吸收率等信息。
另外,请具体给出图3所给的10个位置处的吸收率,相应的数据文件见附件4。
(3) 附件5是利用上述CT系统得到的另一个未知介质的接收信息。
利用(1)中得到的标定参数,给出该未知介质的相关信息。
另外,请具体给出图3所给的10个位置处的吸收率。
(4) 分析(1)中参数标定的精度和稳定性。
在此基础上自行设计新模板、建立对应的标定模型,以改进标定精度和稳定性,并说明理由。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
问题3 —— 上班时间
对于巡视间隔要求大于35分钟的 点,可以采用下面的方法处理: 无论哪一个点,一律在35分钟巡 视一次,这样肯定满足题目的要 求; 在满足巡视时间间隔要求的情况 下,可以不巡视,但要在相应点 处休息,休息的时间就是该点的 巡视需要的时间。
因此,得到如下的排班方法:第 1名工人在8:00开始巡视(上班或换 班),第2名工人则在8:35开始巡视 ,第3名是9:10,第4名是9:45。而每 位工人都走最优的旅行商路线。
班倒,每班工作8小时左右,每班需 要多少人,巡检线路如何安排,并 给出巡检人员的巡检线路和巡检的 时间表。
大约是 5 到 10 分钟,在中午12 时和下午 6 时左右需要进餐一 次,每次进餐时间为 30 分钟, 仍采用每天三班倒,每班需要
问题3. 如果采用错时上班,重新讨论 问题 1 和问题 2,试分析错时上 班是否更节省人力。
Time Windows, VRPTW)。
得到问题的计算结果。
问题分析——巡检人员下限估计
2.1 巡检人员下限估计
为估计巡检人员数量的下限,先计算出旅行商问题所需要的时间(包括 路程时间和巡检耗时)。对于只有26个城市的旅行商问题,无论是精确计算 ,还是近似计算都是不困难的。
可以考虑使用LINGO 程序(见[1])得到精确的 计算结果(见图2),其中 路程耗时68分钟和检查耗时 67分钟,共计135分钟。
图2 26个点的TSP线路图
问题分析——巡检人员下限估计
由于巡视点两次巡视的最小间隔 时间是35分钟,且135/35=3.86,因 此,一个班至少需要4名工人。从图2 (TSP图形)和题目要求(从22号点 开始巡视)来看,只用4名工人巡视 ,肯定是不够的,应考虑增加1名工 人,一个班使用5名工人。
2.2 问题1的求解
现知道每个班需要5名工人,所 以需要将巡视点划分成5个区域,每 个区域最多包含6个点,最少也要有4 个点,其目的是保证每个区域的工作 量(巡视时间)尽量平衡。
由于题目要求,每位工人均从22 号点开始巡视,因此,距22号点较近 的点则多安排一些,而距22号较远的
问题分析 —— 问题1的求解
问题分析 —— 问题1的求解
图3 22号点至其余各点的最短路
从图3出发,作如下尝试,将 • 22、20、19、2、4和21号点编为
第一组; • 23、24、9、8、17和25号点编为
第二组; • 1、3、6、14、5和7号点编为第
三组; • 26、15、18和12号点编为第四组
; • 11、13、16和10号点编为第五组
TSP),更严格的说,是车辆路径问 人的话,一个班至多是26个人。当然
题(Vehicle Routing Problem, VRP) ,没有那糟糕,如果一个人能巡视3
,而且还是带有时间窗口的车辆路径 ~5个点的话,一个班也就是 6~9 个
问题(Vehicle Routing Problem with 人。因此,只需要启发式算法就可能
在完成一轮(26个点)巡视后才能换 间分别是22:00、22:35、23:10和
班。因此,每名工人的换班时间只能 23:45。
是140分钟的整数倍,选择合适的时
由于每天是24小时,而换班的时
间点,工作7个小时开始换班。
间是7小时,三班下来是21小时,所
例如,第一班工作的4名工人上班 以每天的换班时间比前一天提前3小
因此,需要增加1名工人让他在 其他工人进餐时,完成巡视工作。
问题2 —— 进餐时间
排班的方法是: • 原来的排班时间不变; • 5名工人的进餐时间安排在11时至13时之间,和17时至19时之间; • 进餐时间为35分钟(最小的时间间隔),进餐时的巡视工作由第6名(机
动)工人完成; • 第6名(机动)工人的进餐时间可安排在他不替班的非工作时间。
表8至表12给出了部分排班的时间表(白班和中班),图中的黄色部分是 可用于吃饭的时间。 第6名(机动)工人的巡视时间表,以及替换组的情况如表13所示。
问题2 —— 进餐时间
表8 第1组巡视的时间表(部分,包含进餐时间)
问题2 —— 进餐时间
表9 第2组巡视的时间表(部分,包含进餐时间)
问题2 —— 进餐时间
的时间分别是8:00、8:35、9:10和 时。
问题3 —— 换班时间
也就是说,第一班的4名工人在 第二天的换班时间分别是5:00、5:35 、6:10和6:45;第二班的4名工人在 第二天的换班时间分别是12:00、 12:35、 13:10和13:45;第三班的4 名工人在第二天的换班时间分别是 19:00、 19:35、20:10和20:45。
表15 错时上班的换班时间表
4.4 进餐时间
考虑进餐时间会使排班麻烦一些 。 首先由于进餐时间增加了4个小时 ,所以,不可能在一个班内由4名工 人完成。与问题2一样,需要增加1名 机动工人,顶替工人吃饭时的巡视。
由于题目要求,换班只能在22号 点完成,也就是说,吃饭的换班时间 也只能在22号点完成,也就是在完成
产,各个点的巡检周期、巡检耗时、两点之间的连通
关系及行走所需时间在附件中给出。
每个点每次巡检需要一名工人,巡检工人的巡检
起始地点在巡检调度中心(XJ0022),工人可以按固
定时间上班,也可以错时上班,在调度中心得到巡检
任务后开始巡检。现需要建立模型来安排巡检人数和
巡检路线,使得所有点都能按要求完成巡检,并且耗
注意到,每名巡视工人的间隔时 间是35分钟,4名工人的间隔时间是 140分钟,而一次26个点的旅行商问 题的用时是135分钟。
问题3 —— 上班时间
如果第1名工人在第一轮巡视后 ,休息5分钟,那么他要在10:20开始 第二轮的巡视,与第一轮巡视的第4 名工人的巡视时间间隔正好相差35分 钟。第2名工人第二轮巡视的开始时 间是10:55,与第1名工人相差35分钟 ,以此类推。
由上述推导可知,4名工人足够满 足巡视的要求,同时也达到了巡视人 员要求的下界,是最优的。
问题3 —— 上班时间
表14 错时上班的时间表(部分)
问题3 —— 换班时间
4.2 换班时间
9:45,那么,第二班的4名工人的换
由于题目要求,上班或换班的地 班时间分别是15:00、15:35、16:10
点只能是调度中心,也就是说,只能 和16:45,第三班的4名工人的换班时
从上述计算过程来看,实际上, 并不需要精确求解TSP,只需近似计 算,估计出一个下界即可。
例如,可以采用手工计算,也可 以采用某些启发式算法,如最近领域 法、最近插入法、最远插入法、最便 宜插入法、任意插入法和交换两边改 进方法等。
如果不打算自己手工编程,可以 使用现成的软件,例如,R软件中的 TSP函数(见[2])就可以很好地解决 这些问题,提供不同的参数,选择你 喜欢的算法。
问题3 —— 进餐时间
某一轮的巡视后,才可以考虑进餐。 还以第一班工作时间为例,考虑
问题分析 —— 问题1的求解
120分钟)。 • 第3组(1、3、6、14、5和7号点
)的巡视,最长周期是32分钟, 最短周期19分钟(5号点和7号点 的时间间隔分别为720分钟和80分 钟)。 • 第4组(26、15、18和12号点)的 巡视,周期长度是28分钟。 • 第5组(11、13、16和10号点)的 巡视,周期长度是25分钟。
2017全国大学生数学建模竞赛D题 解析
巡检线路的排班——2017年D题讲评
• 题目 • 问题分析及问题1的求解 • 问题2的求解 • 问题3的求解 • 阅卷情况简述
题目 —— 巡检线路的排班
1. 题目 —— 巡检线路的排班
表1 Excel表中的基本信息
某化工厂有 26 个点需要进行巡检以保证正常生
以后的各天以此类推,每天提早 3个小时换班。
一周7天,有7个24小时,恰好有 8个21小时,所以这种换班方案一周 重复一次。具体换班方案如表15所示
。4.3 中间休息
与问题2相同,这里不用考虑每2 个小时左右休息5分钟的问题,因为 这里面有太多的休息时间。例如,一 轮巡视后,可休息5分钟。
问题3 —— 中间休息
多少人,巡检线路如何安排, 并给出巡检人员的巡检线路和 巡检的时间表。
问题分析与模型建立
2.问题分析与模型建立
如果这样考虑问题,这个问题将
这个问题说的复杂一点是旅行商 变得非常复杂。事实上,这个问题并
问题(Traveling Salesman Problem, 没有这么复杂,因为它只有26个需要
TSP),或者是多旅行商问题(m- 巡视的点,如果每个巡视点安排一个
3.问题2的求解
3.1 休息时间
为了简化问题,先不用考虑“每 巡视2小时左右休息大约5到10分钟 ”这一要求。
因为在问题1的求解过程中,5名 工人在巡视过程中,多次出现5分钟 的空余时间,这些空余时间可作休息 时间。
问题2 ——休息时间
3.2 进餐时间
在问题1的讨论中,每班需要5名 工人,考虑两次进餐时间(1小时) ,就需要增加5小时,如果再考虑进 餐的衔接时间,需要增加的时间还不 止5小时,所以仅依赖于原来的5名工 人而挤出进餐时间几乎是不可能的。
巡视全部点(26个点)的最短路 程这恰好是一个旅行商问题,由前面 的计算已知,这个时间是68分钟。
那么巡视全部点的最短时间是 135分钟。而题目要求,要在规定的 时间间隔(最短为35分钟)内完成各 点的巡视。
这样,只能换一种排班方法,让 每名巡视工人完成一轮(26个点)的 巡视,而每名工人的上班时间向后错 35分钟,即在前一位工人开始巡视的 35分钟之后,再安排另一名工人巡视 。
问题分析 —— 问题1的求解
每一组都找出相应TSP的结果, 具体分组和相应的TSP图形如图4 所示。 这种分组方式是为了满足题目的要 求: • 在规定的巡视时间间隔内完成巡视 ; • 每位工人的工作量尽量平衡,巡视 时间即不能过长,也不能过短。