51系列单片机闭环温度控制 实验报告
基于51单片机的自动温度控制报警系统-东北石油大学实习总结报告

1 2
1 2
PORT
1 2 3
GND EN P12
P10 P11 EN P00 P01 P02 P03 P04 P05 P06 P07 PVCC2 GND
GND PVCC2
PVCC1 GND
P10 P11 P12 P00 P01 P02 P03 P04 P05 P06 P07 P13 P14 P15
I/O RST
DS1302
B
VCC
BEEP
8 BAT 7 P22 6 P23 5 P24
SW-PB4
P32 K1
DS
SW-PB4
DS18B20
SW-PB4
P33 K2
SW-PB4
SW-PB4
P34 K3
SW-PB4
SW-PB4
P35 K4
SW-PB4
P37 GND
BQ1 8550
BR1
BU1
4K7
BEEP
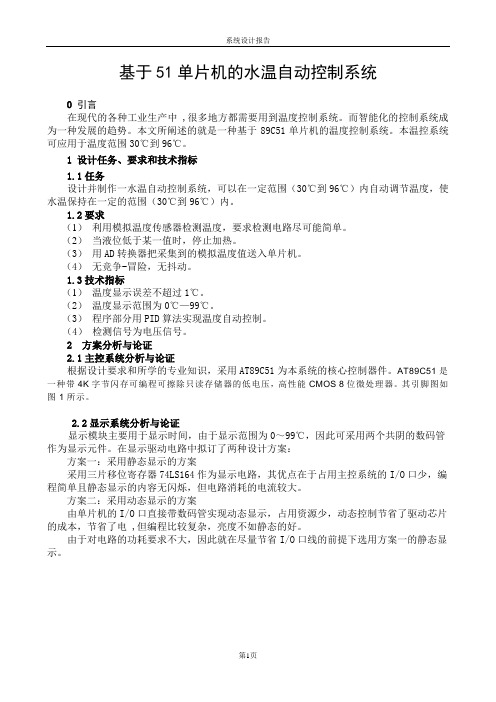
具有线路简单,体积小的特点。因此用它来组成一个测温系统,具有线路
5
简单,在一根通信线,可以挂很多这样的数字温度计,十分方便。 DS18B20 产品的特点
(a)、只要求一个端口即可实现通信。 (b)、在 DS18B20 中的每个器件上都有独一无二的序列号。 (c)、实际应用中不需要外部任何元器件即可实现测温。 (d)、测量温度范围在-55。C 到+125。C 之间。 (e)、数字温度计的分辨率用户可以从 9 位到 12 位选择。 (f)、内部有温度上、下限告警设置。 (6)12864 液晶
MAX232
GND
V+ VVCC
2 6 16
VCC
SC3 104
R1 OUT R2 OUT T1 OUT T2 OUT
基于51单片机的温度控制系统设计
基于51单片机的水温自动控制系统0 引言在现代的各种工业生产中 ,很多地方都需要用到温度控制系统。
而智能化的控制系统成为一种发展的趋势。
本文所阐述的就是一种基于89C51单片机的温度控制系统。
本温控系统可应用于温度范围30℃到96℃。
1 设计任务、要求和技术指标1.1任务设计并制作一水温自动控制系统,可以在一定范围(30℃到96℃)内自动调节温度,使水温保持在一定的范围(30℃到96℃)内。
1.2要求(1)利用模拟温度传感器检测温度,要求检测电路尽可能简单。
(2)当液位低于某一值时,停止加热。
(3)用AD转换器把采集到的模拟温度值送入单片机。
(4)无竞争-冒险,无抖动。
1.3技术指标(1)温度显示误差不超过1℃。
(2)温度显示范围为0℃—99℃。
(3)程序部分用PID算法实现温度自动控制。
(4)检测信号为电压信号。
2 方案分析与论证2.1主控系统分析与论证根据设计要求和所学的专业知识,采用AT89C51为本系统的核心控制器件。
AT89C51是一种带4K字节闪存可编程可擦除只读存储器的低电压,高性能CMOS 8位微处理器。
其引脚图如图1所示。
2.2显示系统分析与论证显示模块主要用于显示时间,由于显示范围为0~99℃,因此可采用两个共阴的数码管作为显示元件。
在显示驱动电路中拟订了两种设计方案:方案一:采用静态显示的方案采用三片移位寄存器74LS164作为显示电路,其优点在于占用主控系统的I/O口少,编程简单且静态显示的内容无闪烁,但电路消耗的电流较大。
方案二:采用动态显示的方案由单片机的I/O口直接带数码管实现动态显示,占用资源少,动态控制节省了驱动芯片的成本,节省了电 ,但编程比较复杂,亮度不如静态的好。
由于对电路的功耗要求不大,因此就在尽量节省I/O口线的前提下选用方案一的静态显示。
图1 AT89C51引脚图2.3 检测系统分析与论证1 温度检测:有选用AD590和LM35D两种温度传感器的方案,但考虑到两者价格差距较大,而本系统中对温度要求的精度不很高,因而选用比较廉价LM35D。
基于C51单片机的温度闭环控制实验程序
#include <reg51.h>#include <absacc.h>#include <math.h>void pid(void) //PID算法子程序void init(void) //初始化子程序void display(void) //延时子程序void clear() //清零子程序int mmul(int x,int y) //16位乘法,溢出赋极值int madd(int x,int y) //16位加法,溢出赋极值int change32_16(int x,int t) //32——16char change16_8(int wd) //16——8#define C8255_A XBYTE[0x7F00]#define C8255_B XBYTE[0x7F01]#define C8255_C XBYTE[0x7F02]#define C8255_CON XBYTE[0x7F03]#define AD0809 XBYTE[0xFEFF] //定义AD0809的地址sbit P17=P1^7; //PWM的驱动char TS=0x64; //采样周期int X=0x80;char SPEC=0x28; //给定:要求达到的温度值char IBAND=0x60; //积分分离值:PID算法中积分分离值int KP=12; //比例系数:PID算法中比例项系数char KI=20; //积分系数char KD=32; //微分系数int CK; //控制量:PID算法产生用于控制的量int TC; //采样周期变量char FPWM; //PWM脉冲中间标识位int CK_1; //控制量变量,用于记录上次控制的值int AAAA; // PWM高电平脉冲时间计算int VAA; //AAAA变量int BBB; //PWM低电平脉冲时间计算int VBB; //BBB变量int TKMARK; //采样标志值int ADMARK; //AD转换结束标志位int ADV ALUE; //AD采样后保存int YK; //反馈:测量温度值int EK; //温度误差int EK_1;int AEK;int BEK;unsigned char dis; //BCD码显示unsigned char led[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};unsigned char b[]={0x00,0x00,0x00,0x00}; //位选/********************温度表**************/unsigned char codea[0x100]={0x14,0x14,0x14,0x14,0x14,0x14,0x14,0x14,0x14,0x14,0x15,0x16,0x17,0x18,0x19, 0x1a,0x1b,0x1c,0x1d,0x1e,0x1e,0x1f,0x20,0x21,0x23,0x24,0x25,0x26,0x27,0x28,0x29,0x2a,0x2b,0x2c,0x2d,0x2e,0x2f,0x31,0x32,0x32,0x33,0x34,0x35,0x36,0x37,0x38,0x39,0x3a,0x3b,0x3 c,0x3d,0x3e,0x3f,0x40,0x42,0x43,0x44,0x45,0x46,0x47,0x48,0x49,0x4a,0x4b,0x4c,0x4d,0x4e,0x4f,0x50,0x4 f,0x50,0x51,0x52,0x53,0x54,0x55,0x56,0x57,0x58,0x59,0x5a,0x5b,0x5c,0x5d,0x5e,0x5f,0x60,0x61,0x6 2,0x63,0x64,0x64,0x65,0x65,0x66,0x66,0x67,0x68,0x69,0x6a,0x6b,0x6c,0x6d,0x6e,0x6e,0x6f,0 x6f,0x70,0x71,0x72,0x73,0x74,0x75,0x76,0x77,0x78,0x79,0x7a,0x7b,0x7c,0x7d,0x7e,0x7f,0x80,0x81,0x82,0x83,0x84,0x84,0x85,0x86,0x87,0x88,0x89,0x8 a,0x8b,0x8c,0x8e,0x8f,0x90,0x91,0x92,0x93,0x94,0x95,0x96,0x97,0x98,0x99,0x9a,0x9b,0x9b,0 x9c,0x9c,0x9d,0x9d,0x9e,0x9e,0x9f,0x9f,0xa0,0xa1,0xa2,0xa3,0xa4,0xa5,0xa6,0xa7,0xa8,0xa9,0xaa,0xab,0xac,0xad,0xae,0xaf,0 xb0,0xb0,0xb1,0xb2,0xb3,0xb4,0xb4,0xb5,0xb6,0xb7,0xb8,0xb9,0xba,0xbb,0xbd,0xbe,0xbe,0xc1 ,0xc2,0xc3,0xc4,0xc5,0xc6,0xc8,0xca,0xcc,0xce,0xcf,0xd0,0xd1,0xd2,0xd4,0xd5,0xd6,0xd7,0xd8,0xd9,0xda,0xdb,0xdc,0xdd ,0xde,0xe3,0xe6,0xe9,0xec,0xf0,0xf2,0xf6,0xfa,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0 xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,}/**************延时子程序*********************/void delay(unsigned int time){unsigned int i;for(i=0;i<time;i++)}/*************主程序*************************/void main(){init();while(1);{while(1){if(TRMARK==0x01)break; //采样周期到否}TRMARK==0x00;while(1){if(ADMARK==0x01)break; //AD转换是否结束}ADMARK=0x00;YK=a[ADV ALUE];dis=(char)YK; //查温度表pid(); //PID算法if(CK<=0x80) //根据CK产生PWMAAAA=0x00;elseAAAA=CK-0x80;BBB=0x7f-AAAA;}}/***********初始化函数*********************/void init(void){YK=0x00; //变量初始化EK=0x00;EK_1=0x00;AEK=0x00;BEK=0x00;CK=0x00;CK_1=0x00;BBB=0x00;VBB=0x00;ADV ALUE=0x00;TKMARK=0x00;ADMARK=0x00;TC=0x00; //采样周期变量FPWM=0x01;AAAA=0x7f;V AA=0x7f;C8255_CON=0x81;display();clear();TMOD=0x11; //T1 ,T0由外部控制中断控制信号,16位定时器,工作在方式一下IP=0x02; //设定T0中断优先级最高IT1=1; //外部中断请求信号方式为脉冲触发方式,外中断1为下降沿有效EX1=1; //允许INT1中断TH0=0xd8;TL0=0xef;TH1=0xd8;TL1=0xef;ET0=ET1=1; //允许T0,T1中断TR0=TR1=1; //启动T0,T1EA=1;AD0809=1; //启动AD转换}void myint3(void) interrupt 3 //定时器1 LED显示{TH1=0xd8;TL1=0xef;ET1=1;display();clear();}void myint1(void) interrupt 2 //外中断1 读AD转换结果{ADV ALUE=AD0809;ADMARK=0x01;}void myint2(void) interrupt 1 //定时器0 启动AD转换{TH0=0xd8;TL0=0xef;ET0=1; //启动定时器0AD0809=1; //启动ADif(TC<TS)TC++; //采样周期变量else{TKMARK=0x01;TC=0x00;}if(FPWM==0x01) //产生PWM ,0x01表示加热模块{if(V A!=0x00){V AA=V AA-1;P17=0; //输出为低加热else{FPWM=0x02;VBB=BBB/2;}}if(FPWM==0x02) //0x02表示停止加热模块{if(VBB!=0x00){VBB=VBB-1;P17=1; //输出为高停止加热}else{FPWM=0x01;V AA=AAAA/2;}}return;}/*****************PID子程序***********/void pid(void){int K,P,I,D;K=P=I=D=0;EK=SPEC-YK;//得到偏差BEK=EK-EK_1-AEK;//12EKAEK=EK-EK_1; //偏差变化量/*********UK=Kp*AEK+Ki*EK+Kd*BEK****/if(abs(EK)>abs(IBAND))I=0; //判积分分离elseI=(EK*TS)/KI; //计算积分项P=AEK;D=((KD/TS)*BEK)/10000; //计算微分项//与书上对照,忽略KP K=madd(I,P);K=madd(D,K);K=mmul(K,KP);CK=K+CK_1;CK=change16_8(CK);CK_1=CK;EK_1=EK;CK=CK+X;}int mmul(int x,int y){int t,z;long s;s=x*y;z=(int)(s&0x0ffff);t=(int)((s>>16)&0x0ffff);s=change32_16(z,t);return(s);}int change32_16(int z,int t) //t=高字节,z=低字节{int s;if(t==0){if((z&0x8000)==0) s=z;else s=0x7fff;}else if((t&0xffff)==0xffff){if((z&0x8000)==0) s=0x8000;else s=z;}else if((t&0x8000)==0) s=0x7fff;else s=0x8000;return(s);}int mmad(int x,int y){int t;t=x+y;if(x>=0&&y>=0) //同号相乘,符号位变反说明溢出{if((t&0x8000)!=0) t=0x7fff;}else if(x<=0&&y<=0){if((t&0x8000)==0) t=0x8000;}return(t);}char change16_8(int wd) //t=高字节,z=低字节{char z,t,s;z=(wd>>8)&0x0ff;if(t==0x00){if((z&0x80)==0) s=z;else s=0x7f;}else if((t&0xff)==0xff){if((z&0x80)==0) s=0x80;else s=z;}else if((t&0x80)==0) s=0x7f;else s=0x80;return(s);}void display() //数码管显示函数{unsigned char i,j=0xf7;b[3]=SPEC/10;b[2]=SPEC%10;b[1]=dis/10;b[0]=dis%10;for(i=0;i<4;i++){C8255_A=j;C8255_B=led[b[i]];delay(0x55);j>>=1;}}void clear(){C8255_B=0x00;}。
《2024年基于51单片机的温度控制系统设计与实现》范文

《基于51单片机的温度控制系统设计与实现》篇一一、引言在现代工业控制领域,温度控制系统的设计与实现至关重要。
为了满足不同场景下对温度精确控制的需求,本文提出了一种基于51单片机的温度控制系统设计与实现方案。
该系统通过51单片机作为核心控制器,结合温度传感器与执行机构,实现了对环境温度的实时监测与精确控制。
二、系统设计1. 硬件设计本系统以51单片机为核心控制器,其具备成本低、开发简单、性能稳定等优点。
硬件部分主要包括51单片机、温度传感器、执行机构(如加热器、制冷器等)、电源模块等。
其中,温度传感器负责实时监测环境温度,将温度信号转换为电信号;执行机构根据控制器的指令进行工作,以实现对环境温度的调节;电源模块为整个系统提供稳定的供电。
2. 软件设计软件部分主要包括单片机程序与上位机监控软件。
单片机程序负责实时采集温度传感器的数据,根据设定的温度阈值,输出控制信号给执行机构,以实现对环境温度的精确控制。
上位机监控软件则负责与单片机进行通信,实时显示环境温度及控制状态,方便用户进行监控与操作。
三、系统实现1. 硬件连接将温度传感器、执行机构等硬件设备与51单片机进行连接。
具体连接方式根据硬件设备的接口类型而定,一般采用串口、并口或GPIO口进行连接。
连接完成后,需进行硬件设备的调试与测试,确保各部分正常工作。
2. 软件编程编写51单片机的程序,实现温度的实时采集、数据处理、控制输出等功能。
程序采用C语言编写,易于阅读与维护。
同时,需编写上位机监控软件,实现与单片机的通信、数据展示、控制指令发送等功能。
3. 系统调试在完成硬件连接与软件编程后,需对整个系统进行调试。
首先,对单片机程序进行调试,确保其能够正确采集温度数据、输出控制信号。
其次,对上位机监控软件进行调试,确保其能够与单片机正常通信、实时显示环境温度及控制状态。
最后,对整个系统进行联调,测试其在实际应用中的性能表现。
四、实验结果与分析通过实验测试,本系统能够实现对环境温度的实时监测与精确控制。
基于51单片机的温度控制系统设计

基于51单片机的温度控制系统设计引言:随着科技的不断进步,温度控制系统在我们的生活中扮演着越来越重要的角色。
特别是在一些需要精确控制温度的场合,如实验室、医疗设备和工业生产等领域,温度控制系统的设计和应用具有重要意义。
本文将以基于51单片机的温度控制系统设计为主题,探讨其原理、设计要点和实现方法。
一、温度控制系统的原理温度控制系统的基本原理是通过传感器感知环境温度,然后将温度值与设定值进行比较,根据比较结果控制执行器实现温度的调节。
基于51单片机的温度控制系统可以分为三个主要模块:温度传感器模块、控制模块和执行器模块。
1. 温度传感器模块温度传感器模块主要用于感知环境的温度,并将温度值转换成电信号。
常用的温度传感器有热敏电阻、热敏电偶和数字温度传感器等,其中热敏电阻是最常用的一种。
2. 控制模块控制模块是整个温度控制系统的核心,它负责接收传感器传来的温度信号,并与设定值进行比较。
根据比较结果,控制模块会输出相应的控制信号,控制执行器的工作状态。
51单片机作为一种常用的嵌入式控制器,可以实现控制模块的功能。
3. 执行器模块执行器模块根据控制模块输出的控制信号,控制相关设备的工作状态,以实现对温度的调节。
常用的执行器有继电器、电磁阀和电动机等。
二、温度控制系统的设计要点在设计基于51单片机的温度控制系统时,需要考虑以下几个要点:1. 温度传感器的选择根据具体的应用场景和要求,选择合适的温度传感器。
考虑传感器的测量范围、精度、响应时间等因素,并确保传感器与控制模块的兼容性。
2. 控制算法的设计根据温度控制系统的具体要求,设计合适的控制算法。
常用的控制算法有比例控制、比例积分控制和模糊控制等,可以根据实际情况选择适合的算法。
3. 控制信号的输出根据控制算法的结果,设计合适的控制信号输出电路。
控制信号的输出电路需要考虑到执行器的工作电压、电流等参数,确保信号能够正常控制执行器的工作状态。
4. 系统的稳定性和鲁棒性在设计过程中,需要考虑系统的稳定性和鲁棒性。
51单片机实验报告(共五则)

51单片机实验报告(共五则)第一篇:51单片机实验报告51单片机实验报告实验一点亮流水灯实验现象 Led灯交替亮,间隔大约10ms。
实验代码#include 〈reg51、h> void Delay10ms(unsigned int c);voidmain(){)1(elihwﻩ{ ﻩP0= 0x00;Delay10ms(50);;ffx0 =0Pﻩﻩ;)05(sm01yaleDﻩ } } void Delay10ms(unsigned int c){unsigned char a,b;for(;c>0;c-—){)——b;0〉b;83=b(rofﻩ{ ﻩﻩfor(a=130;a〉0;a--);}ﻩﻩ}} 实验原理W W hi i le(1)表示一直循环。
循环体内首先将P0 得所有位都置于零,然后延时约5 5 0*10=500ms,接着 0 P0 位全置于 1 1,于就是 D LED 全亮了。
接着循环,直至关掉电源..延迟函数就是通过多个for r 循环实现得。
实验 2 流水灯(不运用库函数)实验现象起初 led 只有最右面得那一个不亮,半秒之后从右数第二个led也不亮了,直到最后一个也熄灭,然后 led 除最后一个都亮,接着上述过程 #includemain(){unsigned char LED;LED = 0xfe;while(1){ ﻩ;DEL = 0PﻩDelay10ms(50);00x0 == 0P(fiﻩ {;1〈〈 DEL = DELﻩ)ﻩ;efx0 = DELﻩ} ﻩ}ﻩ} void Delay10ms(unsigned int c){unsigned char a,b;for(;c>0;c-—){)—-b;0〉b;83=b(rofﻩ{ ﻩﻩﻩ;)--a;0>a;031=a(rofﻩ} ﻩ} ﻩ} 实验原理这里运用了C语言中得位运算符, , 位运算符左移, , 初始值得二进制为1111 1 110, 之后左移一次变成1111 1 100 0,当变成00000 0000 时通过 f if 语句重置 1 1 11 1 11110、延迟函数在第一个报告已经说出了,不再多说..实验 3 流水灯(库函数版)实验现象最开始还就是最右边得一个不亮,然后不亮得灯转移到最右边得第二个,此时第一个恢复亮度,这样依次循环.实验代码#include 〈reg51、h> #include 〈intrins、h〉void Delay10ms(unsigned int c); void main(void){unsigned char LED;;EFx0 = DELﻩ)1(elihwﻩ{ ﻩP0 = LED;;)05(sm01yaleDﻩﻩ;)1,DEL(_lorc_ = DELﻩ} ﻩ} void Delay10ms(unsigned in t c){unsigned chara, b;for(;c〉0;c——){ ﻩfor(b=38;b〉0;b—-){ ﻩﻩ;)-—a;0〉a;031=a(rofﻩ} ﻩ}}实验原理利用头文件中得函数,_cro l_(,), 可以比位操作符更方便得进行 2 2 进制得移位操作, , 比位操作符优越得就是,该函数空位补全时都就是用那个移位移除得数据, , 由此比前一个例子不需要f if 语句重置操作..数码管实验实验现象单个数码管按顺序显示0-9与 A-F。
基于51单片机的温度报警控制系统报告
报告评分批改老师《现代电子综合实验》课程设计报告基于单片机的温度检测控制系统设计学生姓名 学 号专 业 班 级同组学生 提交日期 年 月 日指导教师目录2一、实验目的 .....................................................................................2二、实验要求 .....................................................................................2三、实验开发环境及工具 ...........................................................................2四、按键扫描和液晶显示功能实现 ...................................................................24.1矩阵键盘电路 ...............................................................................4.1.1矩阵键盘电路简介 .....................................................................224.1.2矩阵式按键扫描原理 ...................................................................24.1.3 按键扫描子程序设计思想及流程图 ......................................................34.2 LCD1602显示电路 ..........................................................................34.2.1 LCD1602模块简介 ....................................................................34.2.2 LCD1602模块引脚说明 .................................................................4.2.3 LCD1602控制方式及指令 ..............................................................344.2.4 LCD1602液晶显示子程序设计思想及流程图 ..............................................5五、基于单片机的温度检测控制系统设计过程 .........................................................55.1 系统整体电路框图及功能说明 ................................................................55.2 DS18B20数字温度传感器电路 ..............................................................55.2.1 单总线通信方式简介 ..................................................................65.2.2 DS18B20简介 ......................................................................5.2.3 DS18B20读写操作 ..................................................................665.3 声光报警及控制电路 ........................................................................75.4 软件设计 ..................................................................................5.4.1 主程序设计流程图 ....................................................................775.4.2 DS18B20子程序设计思想及流程图 ...................................................85.4.3 声光报警子程序设计思想及流程图 .....................................................9七、 实验过程及实验结果 ...........................................................................9八、实验中遇到的问题及解决方法 ...................................................................10附件 ............................................................................................一、实验目的(1). 掌握单片机应用系统的设计方法与步骤;(2).掌握硬件电路各功能模块的工作原理、应用电路与编程方法;(3).熟练掌握单总线的应用及编程;(4). 掌握基于单片机的温度检测控制系统的设计与实现。
单片机温度控制器实验报告
南京邮电大学通达学院2010/2011学年第1学期课程设计实验报告课题名称基于CPU的8LED温度显示控制器的设计专业通信工程学生班级070018学号07001836姓名赵静静指导老师林建中实验日期2010 年11 月19 日题目:基于单片cpu的8led温度显示控制器的设计一,实验目的和要求1,Proteus软件的MCS51单片机仿真学习2,根据提供的参考工程,在proteus平台自己重新设计实验电路所需要的电器原理图,并在此基础上编写相对应的程序,实现其功能,学习proteus软件的使用,其中包括原理图器件的选取,原理图的电气连接,程序的编写编译以及运行,并能查出其错误等。
基本要求:用热敏电阻或温度传感器作温度探头,通过AD转换器变换,把温度数据转换成BCD码在LCD上显示。
显示精度±0。
5℃能记录和回放温度参数,记录间隔可任意设定(1S到1h,步长1s)回放数据速度可设定画出温度变化曲线。
发挥部分:1 显示精度提高到±0。
1℃2 显示精度提高到±0。
01℃3 与实际温度计温度比较,找出温度显示误差曲线,在报告中描出,并分析误差来源4 实现温度自动补赏二,实验仪器微型计算机一台三,实验原理温度测量通常可以用两种方式来实现,一种是用热敏电阻之类的器件,由于感温效应,热敏电阻的阻值能够随温度变化,当热敏电阻接入电路,测量过它的电流或其两端的电压就会随温度变化发生响应的变化,在将温度变化的电压或电流采集过来,进行A/D 转化后,发送到单片机进行处理,通过显示电路,就可以将被测温度显示出来。
这种设计需要用到A/D转换电路,其测温电路比较麻烦。
第二种方法是用温度传感器芯片。
温度传感器芯片能把温度信号转换成数字信号,直接发送给单片机,转换后通过显示电路既可以显示。
四,基本芯片及其原理单片机微型计算机简称单片机,是指在一块芯片体上集成了中央处理器CPU、随机存储器RAM、程序存储器ROM或EPROM、定时器/计数器、中断控制器以及串行和并行I/O 接口等部件,构成一个完整的微型计算机。
基于51单片机的水温测控系统实验报告
摘要本次实验是软硬件相结合的实验,通过传感器得到的阻值与其它电阻,可以搭建一个电桥,将水温转化为电压,然后通过放大器将电压放大到所需要的值,将所得的电压送入单片机的AD转换电路,将模拟信号转换成数字信号,从而在单片机的液晶屏上显示当前的温度。
此烧水壶是可控制的,即设定温度,使水加热到设定温度且保温,此控制算法采用PID控制算法来控制继电器的通断,来保证水温恒定在设定温度处。
一、设计要求1.传感器:Pt100铂热电阻2.测量放大器:自己设计与搭建3.被控对象:400W电热杯,约0.5公斤自来水4.执行机构:12V驱动,5A负载能力的继电器5.控制系统:51单片机6.控制算法:PID7.温度范围:环境温度~100度8.测量误差1度,控制误差2度二、设计原理及方案1.热电阻传感器热电阻传感器是利用导体或半导体的电阻值随温度变化而变化的原进行测温的。
热电阻的工作原理:温度升高,金属内部原子晶格的振动加剧,从而使金属内部的自由电子通过金属导体时的阻碍增大,宏观上表现出电阻率变大,电阻值增加,我们称其为正温度系数,即电阻值与温度的变化趋势相同。
2.实验原理框图3.测量放大器电路图说明:电位器R10用来调节偏置电压,而电位器R7则用来调节增益。
实验时,用R10来调节零点,用R7来调节满度。
该电路将0℃-100℃转换为0-5V 电压。
上述电路图采用仪表放大器,将铂热电阻两端的电压U2与电位器R10两端的电压U1差放大,放大器输出电压U0与电压差的关系为:)-)(2(1127248U U R RR R U o ⨯+=由铂热电阻阻值与水温的关系可知,铂热电阻的范围是ΩΩ140~100。
则100)10012(12-140)140(1212)-(100)10012(12-100)10012(1212⨯+⨯+≤≤⨯+⨯+K K U U K K 整理得:V U U 04.0)-(012≤≤而仪表放大器的输出电压为0~5V ,所以放大倍数大约为:5/0.04=125。
基于 51 单片机的温度控制系统设计
基于 51 单片机的温度控制系统设计一、概述随着科技的不断进步,单片机技术在各个领域得到了广泛的应用,其中温度控制系统是其重要的应用之一。
温度控制系统的设计可以帮助我们在工业、农业、生活等领域实现精确的温度控制,提高生产效率和产品质量,降低能源消耗,提升人们的生活舒适度。
本文将讨论基于 51 单片机的温度控制系统设计。
二、系统设计原理1. 温度传感器原理温度传感器是温度控制系统中的关键元件,用于感知环境温度并将其转换为电信号。
常见的温度传感器包括热电偶、热敏电阻、半导体温度传感器等。
本系统选择半导体温度传感器,其工作原理是利用半导体材料的温度特性,通过材料的电阻、电压、电流等参数的变化来测量温度。
2. 控制系统原理温度控制系统的核心是控制器,它根据温度传感器采集到的温度信号进行逻辑判断,然后控制执行元件(如风扇、加热器等)来调节环境温度。
基于 51 单片机的控制系统,通过采集温度传感器信号,使用自身的算法进行温度控制,并输出控制信号给执行元件,从而实现温度的精确控制。
三、系统硬件设计1. 单片机选型本系统选择 51 单片机作为控制器,考虑到其成本低、易于编程和广泛的开发工具支持等优点。
常用的型号包括 STC89C51、AT89S51 等。
2. 温度传感器选型温度传感器的选型最终决定了系统测量的精度和稳定性。
选择适合的半导体温度传感器,如 LM35、DS18B20 等,其精度、响应时间、成本等因素需综合考虑。
3. 控制元件选型根据实际需要选择对应的执行元件,比如风扇、加热器、制冷器等,用于实现温度控制目标。
四、系统软件设计1. 控制算法设计控制系统应当具备良好的控制算法,通过对温度传感器信号的采集和处理,根据设定的温度范围和控制策略来输出对应的控制信号。
经典的控制算法包括比例积分微分(PID)控制算法、模糊控制算法等。
2. 硬件与软件接口设计单片机与传感器、执行元件之间的接口设计尤为重要,应当保证稳定可靠的通信。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
}
u16 read_tlc2543(u8 port)
{
static u8 PORT = 0;
u8 Temp,i,k=0;
u16 AD_value=0;
Temp = port;
CS = 1;
CLK = 0;
delay_us(1);
Temp<<=4;
CS = 0;
while(1)
2.学号:
3.班级:4.同组其他成员:
序号
姓名
班级
学号
1
2
二、实验内容(实验原理介绍)
1、系统基本原理
计算机控制技术实训,即温度闭环控制,根据实际要求,即加温速度、超调量、调节时间级误差参数,选择PID控制参数级算法,实现对温度的自动控制。
闭环温度控制系统原理如图:
2、PID算法的数字实现
本次试验通过8031通过OVEN是模拟加热的装置,加一定的电压便开始不停的升温,直到电压要消失则开始降温。仿真时,U形加热器为红色时表示正在加热,发红时将直流电压放过来接,就会制冷,变绿。T端输出的是电压,温度越高,电压就越高。
/* IE */
sbit EA = IE^7;
sbit ET2 = IE^5; //8052 only
sbit ES = IE^4;
sbit ET1 = IE^3;
sbit EX1 = IE^2;
sbit ET0 = IE^1;
sbit EX0 = IE^0;
/* IP */
sbit PT2 = IP^5;
temp =(u16)(temp1*10);
if((temp%10)>4)
temp = temp/10+1;
else
temp = temp/10;
tempp;
}
#include<reg52.h>
#include"wendu.h"
#include"tlc2543.h"
EN = 0;
}
/*************
函数功能:Show_Num初始化
****************/
void Show_Num(u8 x,u8 y,u8 n,u16 num)//n为数字长度num小于等于65535
{
u16 Temp=num;
u8 a[5],i;
}
k++;
if(k>2)
{
PORT = port;
}
}
return AD_value;
}
u8 AD_deal(void)
{
u16 AD_value;
u16 temp;
float temp1;
AD_value = read_tlc2543(0x00);
temp1 =(AD_value*0.04069);
void Show_fNum(u8 x,u8 y,u16 num);
void LCD_Init(void);
void key_scan(void);
//void key_scan(void);
extern u16 read_tlc2543(u8 port);
#endif
#ifndef TLC2543_H_
/* TCON */
sbit TF1 = TCON^7;
sbit TR1 = TCON^6;
sbit TF0 = TCON^5;
sbit TR0 = TCON^4;
sbit IE1 = TCON^3;
sbit IT1 = TCON^2;
sbit IE0 = TCON^1;
sbit IT0 = TCON^0;
Header file for generic 80C52 and 80C32 microcontroller.
Copyright (c) 1988-2002 Keil Elektronik GmbH and Keil Software, Inc.
All rights reserved.
--------------------------------------------------------------------------*/
式中e是指测量值与给定值之间的偏差
TD微分时间
T积分时间
KP 调节器的放大系数
将上式离散化得到数字PID位置式算法,式中在位置算法的基础之上得到数字PID
增量式算法:
3、硬件电路设计
在温度控制中,经常采用是硬件电路主要有两大部分组成:模拟部分和数字部分,对这两部分调节仪表进行调节,但都存在着许多缺点,用单片机进行温度控制使构成的系统灵活,可靠性高,并可用软件对传感器信号进行抗干拢滤波和非线性补偿处理,可大大提高控制质量和自动化水平;总的来说本系统由四大模块组成,它们是输入模块、单片机系统模块、计算机显示与控制模块和输出控制模块。输入模块主要完成对温度信号的采集和转换工作,由温度传感器及其与单片机的接口部分组成。利用模拟加热的装置来控制温度。
8031对温度的控制是通过可控硅调控实现的。可控硅通过时间可以通过可控硅控制板上控制脉冲控制。该触发脉冲想8031用软件在P1.3引脚上产生,受过零同步脉冲后经光偶管和驱动器输送到可控硅的控制级上。偏差控制原理是要求对所需温度求出偏差值,然后对偏差值处理而获得控制信号去调节加热装置的温度。
PID控制方程式:
AD_value<<=1;
if(SDO)
AD_value |= 0x01;
delay_us(2);
CLK = 1;
}
CLK = 0;
CS = 1;
if(PORT == port)
break;
else
{
Temp = port;
Temp<<=4;
delay_us(2);
CS = 0;
//PORT = port;
void delay_ms(u16 z)
{
u16 i;
u8 j;
for(i=z;i>0;i--)
for(j=120;j>0;j--);
}
/*************
函数功能:LCD写数据
****************/
void LCD_WriteData(u8 Dat)
{
RS = 1;
// delay_ms(5);
sbit IN2 = P3^6;
sbit IN1 = P3^5;
void delay_ms(u16 z);
void LCD_WriteData(u8 Dat);
void LCD_WriteCOM(u8 com);
void Show_Num(u8 x,u8 y,u8 n,u16 num);//n为数字长度num小于等于65535
sfr IE = 0xA8;
sfr IP = 0xB8;
sfr SCON = 0x98;
sfr SBUF = 0x99;
/* 8052 Extensions */
sfr T2CON = 0xC8;
sfr RCAP2L = 0xCA;
sfr RCAP2H = 0xCB;
sfr TL2 = 0xCC;
sfr TH2 = 0xCD;
成绩:
重庆邮电大学
自动化学院综合实验报告
题目:51系列单片机闭环温度控制
学生姓名:蒋运和
班级:0841004
学号:2010213316
同组人员:李海涛陈超
指导教师:郭鹏
完成时间:2013年12月
一、实验名称:
51系列单片机闭环温度控制实验
——基于Protuse仿真实验平台实现
基本情况:
1.学生姓名:
/* BIT Registers */
/* PSW */
sbit CY = PSW^7;
sbit AC = PSW^6;
sbit F0 = PSW^5;
sbit RS1 = PSW^4;
sbit RS0 = PSW^3;
sbit OV = PSW^2;
sbit P = PSW^0; //8052 only
#ifndef __REG52_H__
#define __REG52_H__
/* BYTE Registers */
sfr P0 = 0x80;
sfr P1 = 0x90;
sfr P2 = 0xA0;
sfr P3 = 0xB0;
sfr PSW = 0xD0;
sfr ACC = 0xE0;
sfr B = 0xF0;
sbit INT0 = P3^2;
sbit TXD = P3^1;
sbit RXD = P3^0;
/* SCON */
sbit SM0 = SCON^7;
sbit SM1 = SCON^6;
sbit SM2 = SCON^5;
sbit REN = SCON^4;
sbit TB8 = SCON^3;
sbit RB8 = SCON^2;
P1 = Dat;
EN = 1;
delay_ms(5);
EN = 0;
}
/*************
函数功能:LCD命令
****************/
void LCD_WriteCOM(u8 com)
{
RS = 0;
// delay_ms(5);
P1 = com;
EN = 1;
delay_ms(5);
#define u16 unsigned int
u16 read_tlc2543(u8 port);