X-Y数控工作台机
X-Y数控工作台设计说明书(最终版)
高、动态响应快、运转平稳、寿命长、效率高,预紧后可消除反向间隙。
(3)减速装置的选用
选择了步进电动机和滚珠丝杠副以后,为了圆整脉冲当量,放大电动机的输出转矩,降低运动部件
折算到电动机转轴上的转动惯量,可能需要减速装置,且应有消间隙机构。为此,本设计决定采用无间
2.2控制系统的设计.................................................................3
2.3绘制系统组成框图...............................................................3
2.4绘制机械传动系统简图...........................................................3
3、机械传动部件的计算与选型...........................................................4
3.1脉冲当量的确定.................................................................4
伺服系统实现位置伺服控制有开环、闭环、半闭环3种控制方式。开环控制的伺服系统存在着控制
精度不能达到较高水平的基本问题,但是步进电机具有角位移与输入脉冲的严格对应关系,使步距误差
不会积累;转速和输入脉冲频率严格的对应关系,而且在负载能力范围内不受电流、电压、负载大小、
环境条件的波动而变化的特点。并且步进电机控制的开环系统由于不存在位置检测与反馈控制的问题,
X-Y双坐标联动数控工作台课程设计说明书

目录1。
课程设计目的 (1)2。
课程设计任务 (1)2.1设计题目: (1)2。
2技术数据 (1)2。
3技术要求 (1)3。
总体结构设计 (1)3.1滚珠丝杠设计 (2)3.2滚珠丝杠副的选取 (3)3。
3稳定性运算 (4)3。
4压杆稳定性计算 (5)4.滚动导轨 (6)4。
1计算行程长度寿命 Ts (6)4。
2计算动载荷 (6)5。
步进电机的选择 (8)5.1步距角的确定 (9)5.2步进电机转矩校核 (10)5.3频率校核 (12)6.总结 (12)7。
参考文献 (13)1。
课程设计目的本课程设计的目的在于培养学生对典型机电一体化产品机械结构的设计能力和对机电伺服系统的设计能力,在学习有关专业课程设计的基础上,进行机电系统设计的初等训练,掌握手册、标准、规范等资料的使用方法,培养分析问题和解决问题的能力,为以后的毕业设计打下良好的基础.2.课程设计任务2。
1设计题目:X—Y双坐标联动数控工作台设计2。
2技术数据工作台长×宽(mm):450×310工作台重量(N):3300行程(mm):ΔX=60-100;ΔY=50-100脉冲当量:0。
05-0。
08mm/p2。
3技术要求(1)工作台进给运动采用滚珠丝杠螺旋结构(2)滚珠丝杠支撑方式:双锥-简支型(3)驱动电机为反应式步进电机(4)步进电机与滚珠丝杠间采用齿轮降速要求消除齿轮间隙3.总体结构设计数控工作台采用由步进电机驱动的开环控制结构,其单向驱动系统结构简图如图所示:实际设计的工作台为X、Y双坐标联动工作台,工作台是由上拖板、中拖板、下拖板及导轨、滚珠丝杠等组成.其中下拖板与床身固联,它上面固定X向导轨,中拖板在下拖板的导轨上横向运动,其上固定Y向导轨,上拖板与工作台固联,在Y向导轨上移动。
X、Y导轨方向互相垂直。
3。
1滚珠丝杠设计滚珠螺旋传动按滚动体循环方式分为外循环和内循环两类,其中应用较广的是插管式和螺旋槽式,它们各有特点,其轴向间隙的调整方法主要有垫片调隙式和螺纹调隙式。
(完整版)XY数控工作台设计说明书.docx
一、总体方案设计1.1设计任务题目: X— Y 数控工作台的机电系统设计任务:设计一种供立式数控铣床使用的X—Y 数控工作台,主要参数如下:1)工作台面尺寸C×B× H=【 200+(班级序号)× 5】 mm×【 200+(班级序号)× 5】mm×【 15+(班级序号)】mm;2)底座外形尺寸C1×B1× H1=【 680+(班级序号)× 5】mm×【 680+(班级序号)×5】mm×【 230+(班级序号)× 5】 mm;3)工作台加工范围X=【 300+(班级序号)× 5】mm,Y=【300+(班级序号)× 5】mm;4) X 、Y 方向的脉冲当量均为0.005mm/脉冲; X、 Y 方向的定位精度均为± 0.01mm;5)夹具与工件质量M=【15+(班级序号)】kg;6)工作台空载最快移动速度为3m/min;工作台进给最快移动速度为0.5m/min 。
7)立铣刀的最大直径d=20mm;8)立铣刀齿数Z=3;9)最大铣削宽度a e20mm ;10)最大被吃刀量a p10mm 。
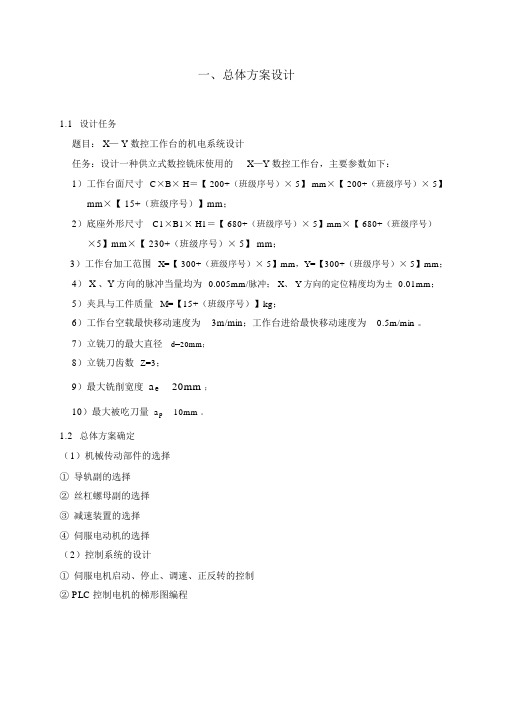
1.2总体方案确定(1)机械传动部件的选择① 导轨副的选择② 丝杠螺母副的选择③ 减速装置的选择④ 伺服电动机的选择(2)控制系统的设计① 伺服电机启动、停止、调速、正反转的控制② PLC 控制电机的梯形图编程XY数控工作台结构Y 方向传动机构微机工作台电型步进电接动机减速器机驱滚珠丝杠口动电人机接口路减步进电速滚器珠动机X 方向传动机构丝杠系统总体方案结构框图1.3设计的基本要求(1)按照机械系统设计的步骤进行相关计算,完成手写设计说明书。
(2)计算结果作为装配图的尺寸和零部件选型的依据,通过 AutoCAD软件绘制 XY数控工作台的总装配图,并绘制 AO图纸。
数控钻床X—Y数控工作台设计

数控钻床X—Y数控工作台设计引言:数控钻床是一种应用数控技术进行钻孔加工的机床。
X—Y数控工作台是数控钻床中的一个重要部件,它能够提供X轴和Y轴方向的运动,实现工件的精确定位和加工。
本文将对数控钻床X—Y数控工作台的设计进行讨论和探索。
一、需求分析:在进行数控钻床X—Y数控工作台的设计之前,我们首先需要对其需求进行全面的分析。
数控钻床X—Y数控工作台主要用于钻孔加工,因此需要具备以下功能和性能:1.能够实现X轴和Y轴方向的精确运动,并能够快速定位;2.具备高精度定位和加工能力,满足不同工件的加工需求;3.高刚度和稳定性,能够承受较大的切削力;4.操作简单、易于维护。
二、设计方案:基于需求分析,我们可以提出以下设计方案:1.结构设计:选用高刚度的结构设计,采用铸铁或钢材作为材料,增加机床的稳定性和刚度。
2.运动系统设计:采用直线导轨和滚珠丝杠作为定位和传动机构,实现X轴和Y轴的准确运动控制。
3.控制系统设计:采用数控系统进行控制,通过编程控制钻孔的位置、进给速度等参数。
4.电气系统设计:选用高品质驱动器和电机,确保工作台的平稳运行。
5.人机界面设计:设计直观、易操作的人机界面,方便操作员进行钻孔程序的编写和工作台的操作控制。
6.安全设计:设置安全装置,如急停按钮、防护罩等,确保操作人员的人身安全。
三、具体实施:1.结构设计:针对工作台的刚性需求,选用铸铁作为主要结构材料,通过有限元分析等方法进行结构优化设计,确保机床的稳定性和刚度。
2.运动系统设计:选用高精度直线导轨和精密滚珠丝杠,通过传感器和编码器实时反馈位置信息,实现更精确的定位和运动控制。
3.控制系统设计:选用先进的数控系统,通过编程控制钻孔位置、进给速度等参数,实现自动化运行和高效率加工。
4.电气系统设计:选用高品质电机和驱动器,结合合适的减速装置,确保工作台的平稳运行和高速加工。
5.人机界面设计:设计直观、易操作的人机界面,可以通过触摸屏或键盘等方式进行操作,方便操作员进行加工参数的设置和调整。
课程设计-X--Y移动平台.

韩雄飞 __ 完毕日期 ______2023年1月10日_ _______
摘要
本文重要对X-Y数控工作台机电系统和控制系统进行设计。
X-Y数控工作台是许多机电一体化设备旳基本部件,如数控车床旳纵-横向进刀机构、数控铣床和数控钻床旳X-Y工作台、激光加工设备旳工作台、电子元件表面贴装设备等。
模块化旳X-Y数控工作台一般由导轨座、移动滑块、工作平台、滚珠丝杠螺母副,以和伺服电动机等部件构成。
其中,伺服电动机作为执行元件用来驱动滚珠丝杠,滚珠丝杠旳螺母带动滑块和工作平台在导轨上运动,完毕工作台在X、Y 方向旳直线移动。
导轨副、滚珠丝杠螺母副和伺服电动机等均已原则化,由专门厂家生产,设计时只需根据工作载荷选用即可。
控制系统根据需要选用设计专用旳微机控制系统。
关键字:X-Y数控工作台,滚珠丝杠螺母副,伺服电动机,微机控制系统。
目录。
数控X-Y工作台设计精选全文完整版

可编辑修改精选全文完整版机电一体化课程设计说明书题目:X-Y数控工作台机电系统设计班级:11级机械2班姓名:xxq学号指导老师:日期:2014年6月30日X-Y 数控工作台机电系统设计任务书题目:X-Y 数控工作台机电系统设计设计任务:设计一种供立式数控铣床使用的X-Y 数控工作台 设计要求:1、每6人一组数据,要求独立完成。
2、图纸要求:机械系统设计图纸2张(A 2),控制原理图一张(A 1)3、设计计算说明书1份(手写或电子版) 第八组主要参数:1. 立铣刀最大直径的d=12mm ;2. 立铣刀齿数Z=2;3. 最大铣削宽度e a =10mm;4. 最大背吃刀量p a =8mm;5. 加工材料为碳钢。
6. X 、Y 方向的脉冲当量x σ=0.01 mm/脉冲,y σ=0.005mm/脉冲;7. X 、Z 方向的定位精度均为01.0±mm;8. 工作台导轨长度为900mm ;9.工作台空载进给最快移动速度:v x =3000 mm/min ,v y =6000mm/min ; 10.工作台进给最快移动速度: min /800min,/400max max mm v mm v fy fx ==; 11.移动部件总重量为960N ; 12.丝杠有效行程为950mm ;目录1.引言: (5)2.设计任务 (5)3.总体方案的确定 (4)3.1 机械传动部件的选择 (4)3.1.1导轨副的选用3.1.2丝杠螺母副的选用3.1.3减速装置的选用3.1.4伺服电动机的选用3.1.5检测装置的选用3.2 控制系统的设计 (4)3.3 绘制总体方案图 (7)4.机械传动部件的计算与选型 (7)4.1 导轨上移动部件的重量估算 (7)4.2 铣削力的计算 (7)4.3 直线滚动导轨副的计算与选型(纵向) (8)F的计算及导轨型号的选取4.3.1 块承受工作载荷m ax4.3.2 距离额定寿命L的计算4.4 滚珠丝杠螺母副的计算与选型 (7)4.4.1 最大工作载荷Fm的计算4.4.2 最大动工作载荷FQ的计算4.4.3 初选型号4.4.4 传动效率η的计算4.4.5 刚度的验算4.4.6 压杆稳定性校核4.5 步进电动机减速箱的选用 (10)4.6 步进电动机的计算与选型 (8)4.6.1 计算加在步进电动机转轴上的总转动惯量Jeq4.6.2 计算加在步进电动机转轴上的等效负载转矩Teq4.6.3 步进电动机最大静转矩的选定4.6.4 步进电动机的性能校核5.增量式旋转编码器的选用 (12)6. 绘制进给传动系统示意图 (12)7.工作台控制系统的设计 (12)8.步进电动机的驱动电源选用 (14)9.致谢 (15)参考文献 (15)1.引言:现代科学技术的不断发展,极大地推动了不同学科的交叉与渗透,导致了工程领域的技术革命与改造。
XY数控工作台设计说明书范文[1]
![XY数控工作台设计说明书范文[1]](https://img.taocdn.com/s3/m/9f11978a31b765ce050814f6.png)
适用标准文案1、整体方案设计设计任务课程设计任务:设计两轴联动的数控 X-Y 运动平台,达成机械系统设计、控制系统设计与相应软件编程,依据实验条件进行调试,达成整个开发系统。
主要参数见下表:系列型号行程台面尺寸底座外形尺寸最大负载XY最大重复定定位X Y C B H C1B1H1长度重量挪动速位精度L N度HXY-4025400250240254156505001847785001M/分±整体方案确立方案确立思想方案一:机械部分传动:滚珠丝杠螺母副支撑:双推 - 双推式滑动导轨控制部分控制器件:单片机控制方式:开环控制伺服电机:步进电动机长处:采纳滚珠丝杠螺母副,可实现旋转运动与直线运动互相变换,在拥有螺旋槽的丝杠螺母中装有滚珠作为中间传动元件,以减少摩擦。
长处是摩擦系数小,传动效率高,敏捷度高,传动安稳,不易产生滑行,传动精度和定位精度高;磨损小,使用寿命长,精度保持性好。
双推式支撑实现高精度传动,采纳单片机控制步进电动机,响应迅速而正确。
弊端:滚珠丝杠螺母副的不足在于制造工艺复杂,成本高,不可以自锁,故需附带制动装置。
开环控制精度比较低。
方案二:机械部分传动:同步带传动支撑:滑动导轨控制部分控制器件:单片机控制方式:开环控制伺服电机:直流无刷电机长处:适用标准文案同步带传动无相对滑动,传动比正确,传动精度高,齿形带的强度高,厚度小、重量轻,故可用于高速传动;传动比恒定,同步带无需特别涨紧,因此作用于轴和轴承等上的载荷小,传动效率高。
单片机控制直流无刷电机,空载电流小,效率高。
弊端:同步带工作时候有温度要求,安装精度要求较高,中心间距要求较高,有时需要张紧,安装麻烦。
无刷直流电机启动时有震动,控制器要求高,价钱高。
采纳开环精度较低。
方案三:机械部分传动:齿轮齿条支撑:直线导轨控制部分控制器件:单片机控制方式:闭环控制伺服电机:直流无刷电机长处:齿轮齿条传动功率大,精度高,稳固性好,响应速度快。
数控车床XY轴工作台和控制系统设计

数控车床XY轴工作台和控制系统设计数控车床是一种通过编程控制刀具在工件表面上进行切削操作的机床。
其中,XY轴工作台和控制系统是数控车床的核心组成部分。
在设计这些部分时,需要考虑机床的精度、稳定性、速度和可编程性等方面。
首先,设计XY轴工作台时需要考虑其机械结构和精度。
机床的工作台需要具备足够的刚性和稳定性,以确保在切削过程中不产生振动和变形。
同时,工作台的导轨和丝杆等传动装置需要具备高精度和低摩擦系数,以保证工件加工的精度和表面质量。
其次,控制系统的设计是数控车床的关键。
控制系统包括硬件和软件两个方面。
在硬件方面,需要选择适合的数控装置、电机和传感器等,以便实现高精度的位置控制。
在软件方面,需要开发编程界面和运动控制算法,以便实现工件加工的自动化和高效率。
在设计控制系统时,需要考虑以下几个关键问题。
首先是编程界面的设计,即操作人员与机床之间的交互方式。
常见的编程界面有G代码和M代码等,操作人员可以通过这些代码来描述加工过程的具体要求。
其次是运动控制算法的设计,即根据编程要求计算出各个轴的运动轨迹和速度。
在运动控制过程中,需要考虑工件表面的曲率和加工精度的要求,以便实现高品质的加工效果。
最后是运动控制的实时性要求,即在短时间内对运动轨迹和速度进行精确控制。
这对硬件设备和软件算法的性能提出了较高的要求。
总结起来,数控车床的XY轴工作台和控制系统的设计是一项复杂而关键的任务。
在设计过程中,需要考虑机床的精度、稳定性、速度和可编程性等方面。
同时,需要选择适合的数控装置、电机和传感器等硬件设备,并开发编程界面和运动控制算法等软件。
通过合理的设计和选择,可以实现数控车床的高效加工和高品质加工。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第4章 控制系统软件设计
4.1 总体方案
对于AT89S51的程序设计,由于所需实现的功能较简单,采用汇编的形式。
编译器采用Keil 7.02b 。
该编译器是51系列单片机程序设计的常用工具,既可用汇编,也支持C 语言编译。
同时具有完善的调试功能。
4.2 主流程图
CTL EQU 3FF8H PA EQU 3FF9H PB EQU 3FFAH PC EQU 3FFBH CMD EQU 02H ORG 0000H AJMP MAIN
P1.0-P1.2
驱动1 X 步进电机 驱动2 Y 步进电机
P1.3-P1.5 P1.6 驱动3 P3.2 外部中断1
P3.3
外部中断2
P0.0-P0.7
AD0~AD7
P2.7
CE
P2.6
IO/M
PB 口
PA 口
PC 口
AT89S51
键盘
电磁铁
8155
ORG 0003H
AJMP INT0IS ;外部中断0入口 ORG 000BH
AJMP TM0IS ;定时器0中断入口 ORG 0013H
AJMP INT1IS ;外部中断1入口 ORG 001BH
AJMP TM1IS ;定时器1中断入口 ORG 0100H
MAIN : ANL P1,0EFH
SETB IT0 ;外中断负跳沿触发 SETB IT1 MOV A ,CTL MOV DPTR ,A
MOVX @DPTR ,CMD ;A 口输入,B 口输出,C 口输入 SETB EX0 ;允许外中断0 SETB EX1 ;允许外中断1 SETB PX0
SETB PX1 ;设置优先级 SETB EA ;开总中断 LOOP :AJMP LOOP ;等待中断
在等待中断的过程中,如果有中断到来,先检查中断0的状态,是中断0则进入中断0的中断服务INT0IS ,是中断1则进入中断1的中断服务INT1IS 。
中断服务0是由4个行程开关触发的,它触发后通过单片机读取PA 口内容,然后将结果反馈到PB 口的LED 上。
中断服务1有6个中断源,这六个中断源分别是手动X 正方向运行,手动X 负方向运行,手动Y 正方向运行,手动Y 负方向运行,复位和绘制圆弧。
上电复位
P1.6=0,吸合电磁铁,绘笔抬起
外部中断,8155初始化 开外部中断,开总中断 等待中断
图4-1 主程序流程图
4.3 INT0中断服务流程图
NT0IS:PUSH ACC Array PUSH DPTL
PUSH DPTH
PUSH PSW
MOV A,PA
MOV DPTR,A
MOVX A,@DPTR ;读PA口内容
MOV R2,A
MOV A,PB
MOV DPTR,A
MOV @DPTR,R2
MOV A,R2
CPL A ;A取反
ANL A,#03H ;屏蔽高6位
JZ A,TM2C
SETB P1.0
SETB P1.1
图4-2 中断服务流程图SETB P1.2
TM2C:MOV A,R2
CPL A
ANL A,#0CH
JZ A,RETIN
SETB P1.3
SETB P1.4
SETB P1.5
RETIN:POP PSW
POP DPTH
POP DPTL
POP ACC
RETI
4.4 INT1中断服务流程图
中断服务流程图如下
图4-3服务中断图INT1IS:CLR EX1
PUSH ACC
PUSH PSW
PUSH DPTL
PUSH DPTH
CLR P1.6
MOV A,PC
MOV DPTR,A
MOVX A,@DPTR ;读PC口内容
MOV R1,A
ANL R1,#0FH
MOV A,PB
MOV DPTR,A
MOV A,@DPTR ;读PB口内容
ANL A,#0FH
SWAP A
ORL A,R1
MOV R2,A
MOV A,PB
MOV DPTR,A
MOVX @DPTR,R2 ;数据输入PB口
INC DPTL
MOV A,@DPTR
JNB ACC.4,RST
JNB ACC.0,X+EN
JNB ACC.1,X-EN
JNB ACC.2,Y+EN
JNB ACC.3,Y-EN
JNB ACC.5,ARC
LOOP1:POP DPTH
POP DPTL
POP PSW
POP ACC
SETB EX1
RETI
4.4.1 复位程序流程图
复位程序流程图
图4-4
DIRX EQU 30H
DIRY EQU 31H
RST:CLR P1.6
RPA:MOV A,PA
MOV DPTR,A
MOVX A,@DPTR ;读PA口内容
JNB ACC.0,ACC2
MOV DIRX,#00H ;表X电机反转
ACALL XMOTOR0 ;X电机反转一步ACC2:JNB ACC.2,LOOP0
MOV DIRY,#00H ;表Y电机反转
ACALL YMOTOR0 ;Y电机反转一步
AJMP RPA
LOOP0:AJMP LOOP1
4.2.2 X轴电机点动正转程序流程图
图4-2 正转流程图
X+EN:CLR P1.6
MOV A,PA
MOV DPTR,A
MOVX A,@DPTR
JNB ACC.0,LOOP2
MOTOR0:MOV DIRX,#01H
ACALL XMOTOR0
MOV A,PC
MOV DPTR,A
MOV A,@DPTR
JNB ACC.0,MOTOR0
LOOP2:AJMP LOOP1
这是X轴电机点动正转的程序,其他的X轴电机点动反转、Y轴电机点动正转、Y 轴电机点动反转依次类推。
4.4.3 绘制图弧程序流程图
图4-6 逐点比较法画圆弧
逐点比较法原理:假设所画圆弧在第一象限,圆心坐标为(0,0),圆弧上点的坐标为(X,Y),圆弧半径为R,每一点的坐标偏差为F=X*X+Y*Y-R*R,若F>0,应沿X轴负方向走一步,此时FX=(X-1)*(X-1)+Y*Y-R*R=F-2X+1,X=X-1;若F<0,应沿Y 轴正方向走一步,此时FY=X*X+(Y-1)*(Y-1)-R*R=F+2Y+1,Y=Y+1。
插补程序见附录。
;/**圆弧插补程序**/
XL EQU 18H
XH EQU 19H
YL EQU 28H
YH EQU 29H
YeL EQU 2AH
YeH EQU 2BH
FL EQU 2CH
FH EQU 2DH
ARC:MOV XL #0E8H
MOV XH #03H
MOV YL #00H
MOV YH #00H
MOV YeL #0E8H
MOV YeH #03H
MOV FL #00H
MOV FH #00H
LP1:MOV A,FH
JNB ACC.7,X0;
LCALL YMOTOR1 ;+Y一步
MOV R2,YH
MOV R3,YL
MOV R4,YH
MOV R5,YL
ACALL BADD ;算Y+Y
MOV R2,FH
MOV R3,FL
MOV R4,R6
MOV R5,R7
ACALL BADD ;算F+2Y
INC R7
MOV FH,R6
MOV FL,R7
INC YL
CMP1:CJNE YH,#03H,LP1
CJNE YL,#0E8H,LP1
CJNE XH, #03H, LP1
CJNE XL, #0E8H, LP1
LJMP LOOP1
XO:ACALL XMOTOR0 ;-X一步MOV R2,XH
MOV R3,XL
MOV R4,XH
MOV R5,XL
ACALL BADD ;算X+X
MOV R2,FH
MOV R3,FL
MOV R4,R6
MOV R5,R7
ACALL BSUB ;算F-2X
INC R7
MOV FH,R6
MOV FL,R7
DEC XL
AJMP CMP1
END
BSUB:MOV A,R3
SUBB A, R5
MOV R7,A
MOV A, R2
SUBB A, R4
MOV R6, A
RET
BADD:MOV A,R3
ADD A, R5
MOV R7, A
XY数控平台
MOV A, R4
ADDC A, R2
MOV R7, A
RET。