连续系统零极点分布与频响特性的关系
§4.8由系统函数零、极点分布决定频响特性
m
sin(ω 0 t )
⋅ H( s )
m
0 2 0
2
2 0
2
H(− jω) = H0 e− jϕ0 0
K − jω 0 = ( s + j ω 0 ) R ( s ) K
jω 0
=
K − jω 0 s + jω 0
+
K jω 0 s − jω 0
+
Kn K1 K2 + + ⋅⋅⋅+ s − p1 s − p2 s − pn
θ1
−
1
ψ1
O
1 RC
σ
0.5
π ϕ(ω) = −arctan CRω 2
0
2 1.5 1 0.5 0
π ω= 0 ϕ(ω) = 2 1 π ω= ϕ(ω) = RC 4 ω= ∞ ϕ(ω) = 0
0
2
4
6
8
10
0
2
4
6
8
10
返回
例4-8-2
研究下图所示RC低通滤波网络 研究下图所示RC低通滤波网络 + 的频响特性。 的频响特性。 v1(t ) V2(jω) H(jω) = − V (jω) 1 解: 写出网络转移函数表达式 V2(s) 1 1 H(s) = = ⋅ 1 V (s) RC 1 s+ RC
∏(s − P )
i =1 i
见 可 H(jω)的 性 零 点 位 有 。 特 与 极 的 置关
令分子中每一项 jω− z j = Nj e 分母中每一项
jψj
− ∏( jω p )
i =1 i
jω− P = Mi ejθi i
零极点分布对系统频率响应的影响
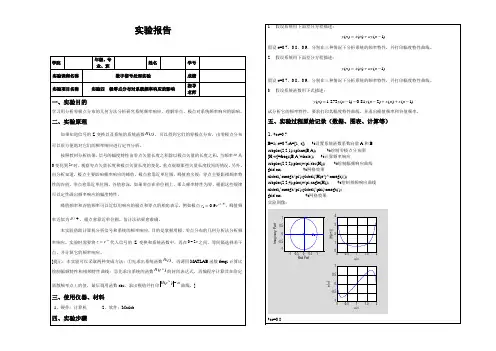
subplot(2,2,1);
zplane(B,A);%绘制零极点分布图
[H,w]=freqz(B,A,'whole');%计算频率响应
subplot(2,2,2);
plot(w/pi,abs(H));grid on;%绘制幅频响应曲线
实验图像:
%a=0.8
B=1;a=0.8;A=[1,-a];%设置系统函数系数向量A和B
subplot(2,2,1);
zplane(B,A);%绘制零极点分布图
[H,w]=freqz(B,A,'whole');%计算频率响应
subplot(2,2,2);
plot(w/pi,abs(H));grid on;%绘制幅频响应曲线
五、实验过程原始记录(数据、图表、计算等)
1.%a=0.7
B=1;a=0.7;A=[1,-a];%设置系统函数系数向量A和B
subplot(2,2,1);zplane(B,A);%绘制零极点分布图
[H,w]=freqz(B,A,'whole');%计算频率响应
subplot(2,2,2);plot(w/pi,abs(H));%绘制幅频响应曲线
grid on;%网格效果
xlabel('\omega/\pi');ylabel('|H(e^j^\omega)|');
subplot(2,2,4);plot(w/pi,angle(H));%绘制相频响应曲线
xlabel('\omega/\pi');ylabel('\phi(\omega)');
零极点对系统的影响
增加零极点以及零极点分布对系统的影响一般说来,系统的极点决定系统的固有特性,而零点对于系统的暂态响应和频率响应会造成很大影响。
以下对于零极点的分布研究均是对于开环传递函数。
零点一般是使得稳定性增加,但是会使调节时间变长,极点会使调节时间变短,是系统反应更快,但是也会使系统的稳定性变差。
在波特图上反应为,增加一个零点会在幅频特性曲线上增加一个+20db/10倍频的曲线,幅频曲线上移,增加一个极点,会在幅频特性曲线上增加一个-20db/10倍频的曲线,幅频曲线下移。
在s左半平面增加零点时,会增加系统响应的超调量,带宽增大,能够减小系统的调节时间,增快反应速度,当零点离虚轴越近,对系统影响越大,当零点实部远大于原二阶系统阻尼系数ξ时,附加零点对系统的影响减小,所以当零点远离虚轴时,可以忽略零点对系统的影响。
从波特图上来看,增加一个零点相当于增加一个+20db/10倍频的斜率,可以使的系统的相角裕度变大,增强系统的稳定性。
在s右半平面增加零点,也就是非最小相位系统,非最小相位系统的相位变化范围较大,其过大的相位滞后使得输出响应变得缓慢。
因此,若控制对象是非最小相位系统,其控制效果特别是快速性一般比较差,而且校正也困难。
对于非最小相位系统而言,当频率从零变化到无穷大时,相位角的便变化范围总是大于最小相位系统的相角范围,当ω等于无穷大时,其相位角不等于-(n-m)×90º。
非最小相位系统存在着过大的相位滞后,影响系统的稳定性和响应的快速性。
在s左半平面增加极点时,系统超调量%pσ减小,调整时间st(s)增大,从波特图上看,s左半平面增加一个极点时,会在幅频特性曲线上增加一个-20db/10倍频的曲线,也就意味着幅频特性曲线会整体下移,导致相角域度减小,从而使得稳定性下降。
当极点离原点越近,就会增大系统的过渡时间,使得调节时间增加,稳定性下降,当系统影响越大当极点实部远大于原二阶系统阻尼系数ξ时,附加极点对系统的影响减小,所以当极点远离虚轴时可以忽略极点对系统的影响。
§4-6 系统函数与系统的频响特性
H (s)
k s1
(s 1)(s 2 )
H ( j)
k j1
( j 1)( j 2 )
系统函数的零极图如下:
《Signals & Systems》
《信号与系统》
大连海事大学信息科学技术学院
⑴ 当Ω=0,零点矢量的模等于0,相角
等于π/2,幅频响应|H( jΩ)|=0;极点 矢量的相角均等于零, φ(Ω)= (π/2)。 1
如上两例RC电路,试根据其零极图,粗略的画出其频响曲线。
先看以电容电压为输出的情况。其零极 图如下:
R
ui (t)
C
uo (t)
⑴ 当Ω=0,极点矢量指向原点,其模长 为α,相角等于0;于是 |H( jΩ)|=α/α=1,φ(Ω)=0。
⑵ 当Ω↑,极点矢量模↑,相角↑; |H( jΩ)|↓,φ(Ω)=-arctg(Ω/α)↓。
《信号与系统》
大连海事大学信息科学技术学院
§4-6 系统函数的零极点分布与系统的频率响应
一、H(s)与H(jΩ)
由前所讲,拉氏变换是傅氏变换由实频域Ω至复频域s的推广, 傅氏变换是拉氏变换在s平面虚轴上的特例。即
j
H ( j) H (s) |s j
二、H(s)的零极点分布与H(jΩ)
由于H(s)一般是有理分式,即它可表示为
s
C (s p1)(s p2)
上式中 1 ( 1 )2 4
p1,2 RC
RC 2
LC
1 ( 1 )2 1 2RC 2RC LC
《Signals & Systems》
《信号与系统》
大连海事大学信息科学技术学院
令 1
2RC
1 LC
由连续系统零极点分布分析系统的频率特性_MATLAB 2014从新手到高手_[共3页]
![由连续系统零极点分布分析系统的频率特性_MATLAB 2014从新手到高手_[共3页]](https://uimg.taocdn.com/5e665dc9c5da50e2534d7f02.webp)
由前面分析可知,连续系统的零极点分布完全决定了系统的系统函数 H (S ),显然,系统 的零极点分布也必然包含了系统的频率特性。
下面介绍如何通过系统的零极点分布来直接求出系统的频率响应 H (jω ) 的方法——几何 矢量法,以及如何用 MATLAB 来实现这一过程。
几何矢量法是通过系统函数零极点分布来分析连续系统频率响应 H (jω ) 的一种直观而又 简便的方法。该方法将系统函数的零极点视为 S 平面上的矢量,通过对这些矢量的模和幅角 的分析,即可快速确定出系统的幅频响应和相频响应。
h (t ) 的时域特性完全由系统函数 H (s ) 的极点位置决定,H (s ) 位于 S 平面左半平面的极点决定
了 h (t ) 随时间衰减的信号分量,位于 s 平面虚轴上的极点决定了冲激响应的稳态信号分量,
位于 s 平面右半平面的极点决定了冲激响应随时间增长的信号分量。
13.4.3 由连续系统零极点分布分析系统的频率特性
根据上述结论,若已知系统的零极点分布,即可直接由几何矢量法分析出系统的频率特性。 上述过程可用 MATLAB 快速实现。用 MATLAB 实现已知系统零极点分布,求系统频 率响应,并绘制其幅频特性和相频特性曲线的程序流程如下:首先定义包含系统014 从新手到高手
a=[1 -1 16.25]; b=[1]; impulse(b,a,5) 绘制的冲激响应 h (t ) 波形如下图(f)所示,此时 h (t ) 为按指数增长的正弦振荡信号。
(a)
(b)
(c)
(d)
(e)
(f)
从上述程序运行结果和绘制的系统冲激响应曲线,可以总结出以下规律:系统冲激响应
系统函数零极点分布对系统时域特性的影响
, 极点在实轴上,
h(t) tet u(t), 0, t , h(t) 0
H(s)
(s2
2s
2
)2
,在虚轴上,
h(t) t sintu(t), t , h(t) 增幅振荡
有实际物理意义的物理系统都是因果系统,即随 t ,
ht ,0 这H (表s)明的极点位于左半平面,由此可知,收敛 域包括虚轴, Fs均和存F在( j, )两者可通用,只需 将
(自由/强迫,瞬态/稳态);
3.可以用来说明系统的正弦稳态特性。
1
二.H(s)零、极点与h(t)波形特征的对应
1.系统函数的零、极点
H (s) A(s) K (s z1 )(s z2 ) (s z j ) (s zm ) B(s) (s p1 )(s p2 ) (s pk ) (s pn )
零输入响应/零状态响应
s2 3s 2Rs s 3Es sr0 r0 3r0
则
Rzi s
sr0 r0 3r0
s2 3s 2
零输入响应为:
Rzs
s
s 3Es
s2 3s 2
rzi (t) 4et 3e2t t 0
即零状态响应为:
rzs (t) 0.5e 2t 2e t 1.5 (t 0)
即可s 。 j 6
三.H(s) 、E(s)的极点分布与自由响应、强迫响应特性的对应
激励: e(t) E(s) u
系统函数:h(t) Hm(s)
(s zl )
(s zj )
E(s) l1 v
H (s) j1 n
(s Pk )
(s Pi )
k 1
响应: r(t) R(s)
u
m
(s zl ) (s zj )
§5.8 系统函数的零极点与时域特性和频域特性的关系
有实际物理意义的物理系统都是因果系统,即随 t , h t 0 ,这表明H ( s ) 的极点位于左半平面。
X
1.2 由H(s) 的零、极点确定系统的时域响应
激励: e( t ) u E ( s )
E (s)
l 1 v
( s zl )
H ( s) 系统函数: h( t ) m H (s)
X
第 15 页
2.1 H(s)和频响特性的关系
设系统函数为 H s ,激励源 e t Em sinω0 t 系统的稳态响应 rss t E m H 0 sin ω0 t 0 其中H s s j ω0 H j ω0 H 0 e j0
平面内。
j ω pi M i e j θi
将 j ω z j、 j ω pi 都看作两矢量之差,将矢量图画于复
X
第 18 页
画零极点图
零点 : jω N j e
jψ j
zj
极点 : j ω M i e jθi pi
θi
jω
Mi pi
Nj
ψj
jω
Nj
zj
j
zj
O
σ
jω 是滑动矢量, jω 矢量变 , 则 N j、 ψ j 和 M i、 θ i 都 发生变化。
当α 0 ,极点在左半平面,衰减振荡 当 α 0 ,极点在右半平面,增幅振荡
X
第 7页
二阶极点
1 H ( s ) 2 , 极点在原点, h( t ) tu( t ), t , h( t ) s 1 H ( s) , 极点在实轴上, 2 (s a) h( t ) t e t u( t ),α 0, t , h( t ) 0 2s H (s) 2 , 在虚轴上, 2 2 (s ω ) h( t ) t sin tu( t ), t , h( t ) 增幅振荡
由系统函数零极点分布决定频响特性
i 1
X
第 8
页
m
j
ω
z
j
H jω
Hs s
jω
K
j1 n
j ω pi
i 1
令分子中每一项 jω z j N j ejψ j
分母中每一项 jω Pi Mi ejθi
将 jω z j、jω - pi都看作两矢量之差,将矢量图画于复 平面内。
s j0
K j0
s j0
Em H 2j
0
(
e j 0
s j0
s
e
j 0
j0
)
X
上式的逆变换为
第 4
页
LБайду номын сангаас1
K s
j 0
j0
K s
j 0
j
0
Em H0 2j
e
j 0
e
j 0 t
e
j 0
e
j0t
X
第
画零极点图
9
页
零点 : jω N j ejψj z j 极点 : jω Mi ejθi pi
jω
jω
θi
Mi
Nj
zj
j
pi Nj
zj
ψj
σ O
σ O
jω是滑动矢量,jω 矢量变动,则N j、ψ j和 Mi、θi都
发生变化。
X
由矢量图确定频率响应特性
第 10
页
H
jω
K
3 页
信号与系统实验六 连续系统的零极点及频率响应特性
实验名称:连续系统的零极点及频率响应特性报告人:姓名班级学号一、实验目的1、掌握系统函数零极点的定义;2、用MA TLAB实现部分分式展开;3、掌握零极点与频率响应的关系;4、掌握极点与系统稳定性的关系。
二、实验内容及运行结果1、已知下列系统函数H(s)或状态方程,求及其零极点,并且画出零极点图,试判断系统是否稳定,根据零极点位置推导单位冲激响应的形式,求解系统的冲激响应h(t)和频率响应H(w)。
(1)num=[1 0 1]; %分子系数,按降幂顺序排列den=[1 2 5]; %分母系数,按降幂顺序排列[z,p]=tf2zp(num,den); %求零点z和极点pfigure(1)zplane(z,p) %作出零极点图sys=tf(num,den);poles=roots(den)figure(2);pzmap(sys)t=0:0.02:10;h=impulse(num,den,t); %绘制冲激响应曲线figure(3);plot(t,h)title('Impulse Respone')[H,w]=freqs(num,den); %绘制频率响应曲线figure(4);plot(w,abs(H))xlabel('\omega')title('Magnitude Respone')poles =-1.0000 + 2.0000i-1.0000 - 2.0000i系统的稳定性和频响特点:由于系统函数的极点位于s虚轴,故系统稳定;并且单位冲激响应是等幅振荡(单位阶跃)信号。
(2)num=[3 -9 6]; %分子系数,按降幂顺序排列den=[1 2 2]; %分母系数,按降幂顺序排列[z,p]=tf2zp(num,den); %求零点z和极点pfigure(1)zplane(z,p) %作出零极点图sys=tf(num,den);poles=roots(den)figure(2);pzmap(sys)t=0:0.02:10;h=impulse(num,den,t); %绘制冲激响应曲线figure(3);plot(t,h)title('Impulse Respone')[H,w]=freqs(num,den); %绘制频率响应曲线figure(4);plot(w,abs(H))xlabel('\omega')title('Magnitude Respone')poles =-1.0000 + 1.0000i-1.0000 - 1.0000i系统的稳定性:由于系统函数的极点位于s右半平面,故系统不稳定;单位冲激响应是随时间增长的信号。
由系统函数零、极点分布决定频响特性
j 1 n
M1
H ( j ) k
( j z )
j
p1
N1
( j p )
i i 1
j 1 n
z1
j 1
j z1 N1e
j p1 M1e
j1
5
H ( j ) k
( j z j ) ( j p )
i i 1 j 1 n
28
对第四章的基本要求
理解拉普拉斯变换的定义;熟练掌握拉普拉斯 变换的性质、卷积定理的意义及它们的运用。 能利用拉普拉斯变换求解线性系统的冲激响应、 零输入响应、零状态响应和全响应。能根据系 统函数的零、极点分布情况分析、判断系统的 时域与频域特性,掌握频响特性曲线的几何作 图法。理解全通网络、最小相移网络的概念。 会判定系统的稳定性。
17
极点相同,零点以jw轴成镜 像,则它们的幅频特性相同
18
对应零点在左半面的图
对应零点在右半面的图
“最小相移网络” :零点仅位于左半平面或 虚轴上的网络函数称为“最小相移网络”。 前提条件:极点都位于左半平面即为稳定系统。
19
非最小相移网络
非最小相移网络 可以看成最小相 移网络和全通网 络的级联
s j 0 t
0
单边拉氏变换
傅氏变换
s j t
LT [ f ( t )] FT [ f ( t )u( t )e t ] ( s j )
26
由已知的单边拉氏变换求取傅里叶变换 前提条件:函数f(t)为有始信号, 即当t<0时,f(t)=0。
29
最小相移网络
全通网络 不是最小相移网络
22
4.11 线性系统的稳定性 稳定系统对于有界激励信号产生有 界的响应函数(有界输入有界输出 BIBO系统)。 稳定性是系统自身的性质之一,系 统是否稳定与激励信号的情况无关 系统的冲激响应h(t)和系统函数 H(s)也表征了系统的稳定性
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
-1 100
-2
0
Phase (degrees)
-3
-100
-4
-4
-3
-2
-1
0
1
2
3
4
Real Axis (seconds-1)-200ຫໍສະໝຸດ 10-210-1100
101
Frequency (rad/s)
零极点图
频率特性曲线图
形
Magnitude
0
10
-1
10
-2
10
-3
10
-2
-1
0
1
10
10
10
10
Frequency (rad/s)
100
50
0
-50
-100
-2
-1
0
1
10
10
10
10
Frequency (rad/s)
频率特性曲线图 形
(5) H5(s)
;
程序如下:
close all b=[1 0 0]; a=([1 3 2]); SYS=tf(b,a); pzplot(SYS); axis([-4,4 -2,2]); figure; freqs(b,a);
MATLAB 绘制的零、极点图和频率响应特性曲线如图所示。 可知该系统具有全通滤波特性。
Imaginary Axis (seconds-1)
Pole-Zero Map 4
4.00196e-14
10
Magnitude
3
100
2
-4.00196e-14
10
1
-2
-1
0
1
10
10
10
10
Frequency (rad/s) 0
Magnitude
0
10 10-1 10-2
-3
10 10-2
100 50 0 -50
-100 10-2
10-1
100
101
Frequency (rad/s)
10-1
100
101
Frequency (rad/s)
频率特性曲线图 形
(6) H6(s)
;
程序如下:
close all b=[1 0]; a=([1 2 10]); SYS=tf(b,a); pzplot(SYS); axis([-4,4 -4,4]); figure; freqs(b,a);
100
50
0
Phase (degrees)
-3
-50
-4
-4
-3
-2
-1
0
1
2
3
4
-100 10-2
10-1
100
101
Real Axis (seconds-1)
Frequency (rad/s)
频率特性曲线图
形
零极点图
(7) H7(s)
;
程序如下:
close all b=[1 -3 2]; a=([1 3 2]); SYS=tf(b,a); pzplot(SYS); axis([-4,4 -4,4]); figure; freqs(b,a);
Magnitude
100
10-1
-2
10
-3
10
10-2
10-1
100
101
Frequency (rad/s)
0
-50
-100
-150
-200
-2
-1
0
1
10
10
10
10
Frequency (rad/s)
频率特性曲线图
形
零极点图
(4) H4(s)
;
程序如下:
close all b=[1 0]; a=([1 3 2]); SYS=tf(b,a); pzplot(SYS); axis([-4,4 -2,2]); figure; freqs(b,a);
MATLAB 绘制的零、极点图和频率响应特性曲线如图所示。 可知该系统具有带通滤波特性。
Imaginary Axis (seconds-1)
Pole-Zero Map 2
1.5
1
0.5
0
-0.5
-1
-1.5
-2
-4
-3
-2
-1
0
1
2
3
4
Real Axis (seconds-1)
零极点图
Phase (degrees)
;
Magnitude
Phase (degrees)
10-0.1
10-0.4
-0.7
10
-1
10 0 -20 -40 -60 -80
-1
10
0
1
10
10
Frequency (rad/s)
0
1
10
10
Frequency (rad/s)
频率特性曲线图 形
程序如下:
close all b=[1 0]; a=([1 2]); SYS=tf(b,a); pzplot(SYS); axis([-4,4 -2,2]); figure; freqs(b,a);
Magnitude
0
10
10-1
10-2
-3
10
10-2
10-1
100
101
Frequency (rad/s)
100
50
0
10-2
10-1
100
101
Frequency (rad/s)
频率特性曲线图 形
(3) H3(s)
;
程序如下:
close all b=[1]; a=([1 3 2]); SYS=tf(b,a); pzplot(SYS); axis([-4,4 -2,2]); figure; freqs(b,a);
MATLAB 绘制的零、极点图和频率响应特性曲线如图所示。 可知该系统具有高通滤波特性。
Imaginary Axis (seconds-1)
Pole-Zero Map 2
1.5
1
0.5
0
-0.5
-1
-1.5
-2
-4
-3
-2
-1
0
1
2
3
4
Real Axis (seconds-1)
零极点图
Phase (degrees)
MATLAB 绘制的零、极点图和频率响应特性曲线如图所示。
可知该系统具有高通滤波特性。
Imaginary Axis (seconds-1)
Pole-Zero Map 2
1.5
1
0.5
0
-0.5
-1
-1.5
-2
-4
-3
-2
-1
0
1
2
3
4
Real Axis (seconds-1)
零极点图
Phase (degrees)
MATLAB 绘制的零、极点图和频率响应特性曲线如图所示。
可知该系统具有低通滤波特性。
Imaginary Axis (seconds-1)
Pole-Zero Map 2
1.5
1
0.5
0
-0.5
-1
-1.5
-2
-4
-3
-2
-1
0
1
2
3
4
Real Axis (seconds-1)
零极点图
(2) H2(s)
连续系统零极点分布与频响特性的关系
班级:02 学号:2014210
请利用 MATLAB 软件绘制下列因果系统的零极点图和频率响应特性曲 线,并分析系统的滤波特性。
(1) H1(s)
;
程序如下:
close all b=[2]; a=([1 2]); SYS=tf(b,a); pzplot(SYS); axis([-4,4 -2,2]); figure; freqs(b,a);
MATLAB 绘制的零、极点图和频率响应特性曲线如图所示。 可知该系统具有带通滤波特性。
Imaginary Axis (seconds-1)
Pole-Zero Map 4 3 2 1 0 -1 -2
Magnitude
0
10
-1
10
-2
10
-3
10
10-2
10-1
100
101
Frequency (rad/s)
MATLAB 绘制的零、极点图和频率响应特性曲线如图所示。
可知该系统具有低通滤波特性。
Imaginary Axis (seconds-1)
Pole-Zero Map 2
1.5
1
0.5
0
-0.5
-1
-1.5
-2
-4
-3
-2
-1
0
1
2
3
4
Real Axis (seconds-1)
Phase (degrees)