第3章 2 远动终端(RTU
远动工作站RTU的主要功能

信号适合远传,近程可直接采用二进制数据。
五、数据通信的基本概念和信道简介
(3)通信处理机:承担通信控制任务(缓冲匹配、误码检测 、故障检测、路由选择、信道建立等。
(4)通信线路:传送数据信号的线路,公网或专网直接或通 过通信处理机连接。
②遥信(YX):RTU将采集到厂站运行状态按规约上传给 调度中心。包括:断路器和刀闸的位置信号、继电保护 和自动装置的位置信号、发电机和远动装置的运行状态。 容量达几十到上百路。
三、RTU的主要功能
③遥控(YK):调度中心发给RTU的改变设备运行状态的命令。 包括:操作厂站各电压等级的断路器、投切SVG、发电机组的 启停等。容量可达几十个设备。
④ RTU自检、自调功能:反映RTU的自身的可维护能力。 插件损坏诊断,程序“走飞”时的自恢复能力、主备通 道监视功能。
四、RTU基本结构
1.单CPU结构的RTU
CRT
PC机
微机保护
RTU
模拟量 脉冲量 开关量
调节量 控制量
上级调度或 监控中心
四、RTU基本结构
硬件组成: ①系统部分:CPU、总线、RAM、EPROM、计数次/计时 器、中断控制器、串行通信接口。 ②人机联系:打印机、显示器、键盘。 ③输入/输出电路(可编程接口芯片):输入YC、YX输入YT、 YK。 ④通过总线连接。(5)调度计算机:似于远动终端,指调度计算机系统。
三、RTU的主要功能
1.远方功能:RTU与调度中心间通过远距离信息传输所完 成的监控功能。
①遥测(YC):RTU将采集到的厂站运行参数按规约上传 给调度中心。包括P、Q、U、I、档位、温度等,容量达 几十到上百路。另外还包括两类特殊YC: a.数字值:RTU以数字量的形式直接接收后上传。 b.计数脉冲:单独的采集(电路)板。主要指RTU采集的 反应电量的脉冲计数。容量可达到几十路电度量。
远程终端单元(RTU)

配网自动化系统一般由下列层次组成:配电主站、配电子站(常设在变电站内,可选配)、配电远方终端(FTU、DTU、TTU等)和通信网络。
配电主站位于城市调度中心,配电子站部署于110kV/35kV 变电站,子站负责与所辖区域DTU/TTU/FTU等电力终端设备通信,主站负责与各个子站之间通信。
1、远程终端单元(RTU)RTU(Remote Terminal Unit)是一种远端测控单元装置,负责对现场信号、工业设备的监测和控制。
与常用的可编程控制器PLC相比,RTU通常要具有优良的通讯能力和更大的存储容量,适用于更恶劣的温度和湿度环境,提供更多的计算功能。
正是由于RTU完善的功能,使得RTU产品在SCADA系统中得到了大量的应用。
远程终端设备(RTU)是安装在远程现场的电子设备,用来监视和测量安装在远程现场的传感器和设备。
RTU将测得的状态或信号转换成可在通信媒体上发送的数据格式。
它还将从中央计算机发送来得数据转换成命令,实现对设备的功能控制。
1.1定义RTU(Remote Terminal Unit)是一种远端测控单元装置,负责对现场信号、工业设备的监测和控制。
与常用的可编程控制器PLC相比,RTU通常要具有优良的通讯能力和更大的存储容量,适用于更恶劣的温度和湿度环境,提供更多的计算功能。
正是由于RTU完善的功能,使得RTU产品在SCADA系统中得到了大量的应用。
远程终端设备(RTU)是安装在远程现场的电子设备,用来监视和测量安装在远程现场的传感器和设备。
RTU将测得的状态或信号转换成可在通信媒体上发送的数据格式。
它还将从中央计算机发送来得数据转换成命令,实现对设备的功能控制。
1.2特点(1)通讯距离较长;(2)用于各种环境恶劣的工业现场;(3)模块结构化设计,便于扩展;(4)在具有遥信、遥测、遥控领域的水利,电力调度,市政调度等行业广泛使用。
1.3功能(1) 采集状态量并向远方发送,带有光电隔离,遥信变位优先传送;(2) 采集数据量并向远方发送,带有光电隔离;(3) 直接采集系统工频电量,实现对电压、电流、有功、无功的测量并向远方发送,可计算正反向电度;(4) 采集脉冲电度量并向远方发送,带有光电隔离;(5) 接收并执行遥控及返校;(6) 程序自恢复;(7) 设备自诊断(故障诊断到插件级);(8) 设备自调;(9) 通道监视;(10) 接收并执行遥调;(11) 接收并执行校时命令(包括GPS对时功能选配);(12) 与两个及两个以上的主站通讯;(13) 采集事件顺序记录并向远方发送;(14) 提供多个数字接口及多个模拟接口;(15) 可对每个接口特性进行远方/当地设置;(16) 提供若干种通信规约,每个接口可以根据远方/当地设置传输不同规约的数据;(17) 接受远方命令,选择发送各类信息;(18) 可转发多个子站远动信息;(19) 当地显示功能,当地接口有隔离器;(20) 支持与扩频、微波、卫星、载波等设备的通讯;(21) 选配及多规约同时运行,如DL451-91 CDT规约,同进应支持POLLING规约和其他国际标准规约(如DNP3.0、SC1801、101规约);(22) 可通过电信网和电力系统通道进行远方设置。
RTU在SCADA中的作用

RTU在SCADA中的作用RTU是远动终端单元(Remote Terminal Unit)的缩写,是SCADA系统(Supervisory Control And Data Acquisition)中的重要组成部分,负责采集和传输现场数据,控制和监测现场设备,并将数据传送给上位计算机进行处理和分析。
RTU在SCADA系统中的作用和功能非常关键,下面将详细介绍。
1.数据采集:RTU通过现场仪表和传感器采集各种数据,如温度、压力、流量、电流、电压等。
这些数据反映了现场设备的工作状态,是SCADA系统进行监测和控制的基础。
RTU能够将数字、模拟和状态信号转换为标准化的数据格式,确保数据的准确性和可靠性。
2. 数据传输:RTU通过通信网络将采集到的数据传输到上位计算机。
采用多种通信方式,如有线通信(以太网、RS485、Fiber等)和无线通信(GPRS、3G、LTE、LoRa等)。
通过合理选择通信方式和协议,RTU可以在不同的环境中实现稳定和高效的数据传输,确保实时性和可靠性。
3.设备控制:RTU可以实现对现场设备的远程控制,如开关控制、调节阀控制、变频器控制等。
通过与现场设备的连接,RTU可以通过下发指令实现对设备的开启、关闭、调整等操作,实现对现场设备的远程控制。
4.报警与事件处理:RTU可以通过设置报警条件和逻辑,监测现场设备的状态,并在发生异常或故障时生成报警信息。
当设备达到设定的阈值或出现异常情况时,RTU会发出声音、光闪烁等报警信号,同时将报警信息通过通信网络传输到上位计算机,以便及时处理。
5.数据存储与转发:RTU具有一定的存储容量,可以存储历史数据和事件记录。
当通信中断或上位计算机发生故障时,RTU可以将数据存储起来,以免数据丢失。
同时,RTU还可以将存储的数据转发给上位计算机,以便分析和处理。
6.安全保护:RTU具备安全防护功能,可以对通信数据进行加密和认证,保护数据的机密性和完整性。
远动终端rtu的功能
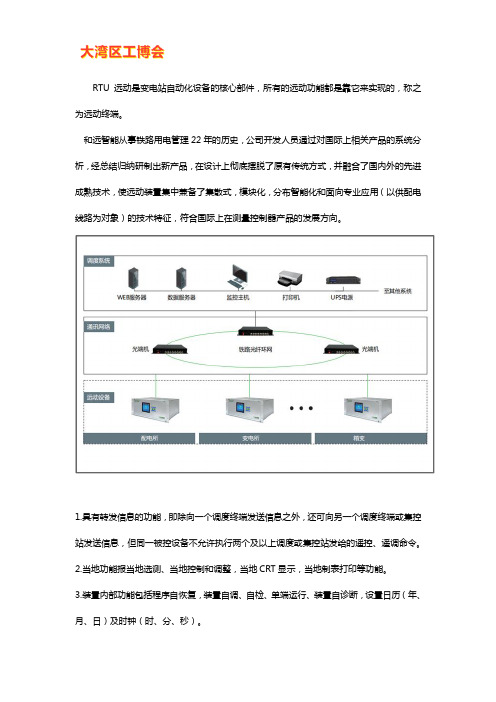
RTU远动是变电站自动化设备的核心部件,所有的远动功能都是靠它来实现的,称之为远动终端。
和远智能从事铁路用电管理22年的历史,公司开发人员通过对国际上相关产品的系统分析,经总结归纳研制出新产品,在设计上彻底摆脱了原有传统方式,并融合了国内外的先进成熟技术,使远动装置集中兼备了集散式,模块化,分布智能化和面向专业应用(以供配电线路为对象)的技术特征,符合国际上在测量控制器产品的发展方向。
1.具有转发信息的功能,即除向一个调度终端发送信息之外,还可向另一个调度终端或集控站发送信息,但同一被控设备不允许执行两个及以上调度或集控站发给的遥控、遥调命令。
2.当地功能报当地选测、当地控制和调整,当地CRT显示,当地制表打印等功能。
3.装置内部功能包括程序自恢复,装置自调、自检、单端运行、装置自诊断,设置日历(年、月、日)及时钟(时、分、秒)。
4.事件顺序记录(SOE)。
5.内存24h(48h)整点数据和异常状态数据。
扩展资料:远程终端发展过程:早期的远动装置是一对一的,也就是在厂站端有一台远动终端,在调度中心就有一台相应的远动装置,称为调度端或主站端,而现今由于采用了计算机技术,远动系统在电力系统中已发展成为数据采集与监控系统,又称SCADA系统(super visory control arid data acquisition system)。
设在调度中心的数据采集子系统,又称前置机系统,可以接收多台远动终端发送来的实时运行参数,亦称为1对N远动终端从20世纪50年代到60年代初,其主要构成元件为电子管与继电器,传送是模拟方式。
60年代中,晶体管与集成电路为主要构成元件的数字式远动终端开始发展。
随着微型计算机技术的发展,微机型远动终端80年代在中国试制并取得成功。
设备组成:微机型远动终端由硬件和软件两部分组成.硬件由各种功能板配上相应的机箱和电源构成。
功能板可以由远动设备研制生产单位选用各种集成电路片和自行设计印剧电路板构成,称为片级设计,亦可以采用微机生产厂家生产的原板(OEM) 构成,称为板级设计。
远动装置
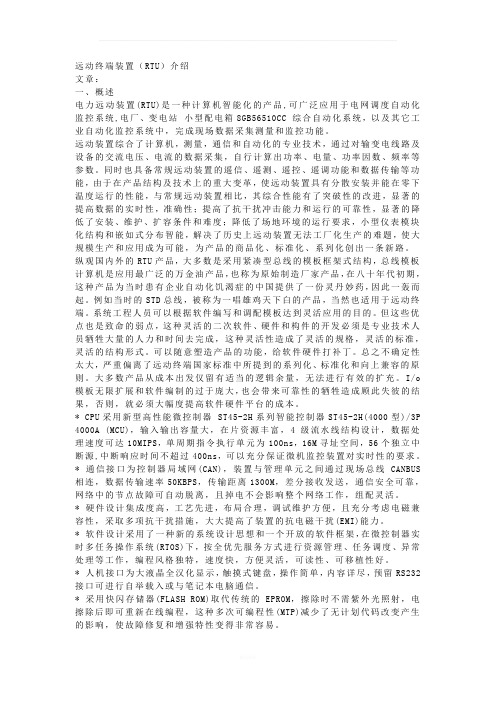
远动终端装置(RTU)介绍文章:一、概述电力远动装置(RTU)是一种计算机智能化的产品,可广泛应用于电网调度自动化监控系统,电厂、变电站小型配电箱8GB56510CC 综合自动化系统,以及其它工业自动化监控系统中,完成现场数据采集测量和监控功能。
远动装置综合了计算机,测量,通信和自动化的专业技术,通过对输变电线路及设备的交流电压、电流的数据采集,自行计算出功率、电量、功率因数、频率等参数。
同时也具备常规远动装置的遥信、遥测、遥控、遥调功能和数据传输等功能,由于在产品结构及技术上的重大变革,使远动装置具有分散安装并能在零下温度运行的性能,与常规远动装置相比,其综合性能有了突破性的改进,显著的提高数据的实时性,准确性;提高了抗干扰冲击能力和运行的可靠性,显著的降低了安装、维护、扩容条件和难度;降低了场地环境的运行要求,小型仪表模块化结构和嵌如式分布智能,解决了历史上远动装置无法工厂化生产的难题,使大规模生产和应用成为可能,为产品的商品化、标准化、系列化创出一条新路。
纵观国内外的RTU产品,大多数是采用紧凑型总线的模板框架式结构,总线模板计算机是应用最广泛的万金油产品,也称为原始制造厂家产品,在八十年代初期,这种产品为当时患有企业自动化饥渴症的中国提供了一份灵丹妙药,因此一轰而起。
例如当时的STD总线,被称为一唱雄鸡天下白的产品,当然也适用于远动终端。
系统工程人员可以根据软件编写和调配模板达到灵活应用的目的。
但这些优点也是致命的弱点,这种灵活的二次软件、硬件和构件的开发必须是专业技术人员牺牲大量的人力和时间去完成,这种灵活性造成了灵活的规格,灵活的标准,灵活的结构形式。
可以随意塑造产品的功能,给软件硬件打补丁。
总之不确定性太大,严重偏离了远动终端国家标准中所提到的系列化、标准化和向上兼容的原则。
大多数产品从成本出发仅留有适当的逻辑余量,无法进行有效的扩充。
I/o 模板无限扩展和软件编制的过于庞大,也会带来可靠性的牺牲造成顾此失彼的结果,否则,就必须大幅度提高软件硬件平台的成本。
远动终端装置rtu的设计
摘要电力远动终端RTU系统是电力调度自动化系统的核心部分,是计算机、数据信息通信、状态自动检测等技术相互协调配合形成的能够对电力供配电各环节进行实时监视和控制的综合智能操作系统。
在分析电力特性参数测量和计算方法的基础上,对电力远动终端RTU系统的拓扑结构进行详细的分析总结。
电力远动终端RTU大大提高电力系统自动化调度与管理水平,保障供配电系统高效稳定的运行。
本文首先对时下RTU的应用和现状展开了论述,使用TI公式的TMS320LF3407A芯片结合CAN总线设计出了符合要求的系统结构,使系统的响应速度更快,测量精度更准。
具有运算能力强,处理速度快以及工作可靠的特点。
最后文章采用C语言编程调试,结果进一步验证了高速、高精度、可靠的特点。
关键词:电网监控、远动终端RTU、DSPAbstractPower far move terminal RTU system is the core of the electric power dispatching automation system of, is a computer, data information communication, the state to be automatic detection technology to coordinate well with each other to form of power supply and distribution the links to real-time monitoring and control of comprehensive intelligence operation system. On the analysis of the characteristic parameters of electric power measure and calculation methods of the foundation, on the far end RTU system power move the topological structure of a detailed analysis of the summary. Power far move terminal RTU greatly improve the automation of electric power systems scheduling and management level, ensure the supply system for the operation of the high efficiency and stability.This paper first on the current application and current situation of RTU on this paper, and use of the formula TMS320LF3407A with TI chips CAN bus designed to meet the requirements of system structure, make the system response speed faster and more accurate measurement accuracy. Has the operation ability, processing speed and reliable characteristic. At last this paper adopts the C programming language testing, the results further verified high speed and high precision and reliable.Keywords: grid monitoring, far move terminal RTU, DSP目录第一章绪论 (3)1.1 国内外RTU发展现状 (3)1.1.1 国外RTU的发展现状 (3)1.1.2 国内RTU的发展现状 (3)1.2论文主要内容 (5)第二章RTU系统方案的构建 (6)2.1电力参数的测量 (6)2.1.1交流电参量的采样方法 (6)2.1.2采样点数的选择 (7)2.1.3基于快速傅立叶变换FFT的电量测量原理 (8)2.1.4频率的测量 (9)2.1.5电流、电压的测量 (9)2.1.6电功率、功率因数的测量 (10)2.2 RTU的基本功能 (11)2.3 微处理器的选择 (12)2.3.1数字信号处理器的主要特点 (12)2.3.2 DSP芯片的选取 (13)2.3.3锁相环同步及频率采样电路 (13)2.4通信方式的实现 (14)2.5系统的总体方案 (15)第三章 RTU系统的硬件电路设计 (17)3.1 信号测量模块的电路设计 (17)3.1.1电压和电流采集电路 (18)3.1.2锁相环同步及频率采样电路 (20)3.1.3开关量与脉冲量的采集 (21)3.2 通信主控模块的电路设计 (22)3.2.1 CAN接口电路 (23)3.2.2串行通信接口电路 (24)3.2.3显示和键盘接口电路 (25)3.2.4 LF2407A的EEPROM扩展及SRAM电路的设计 (26)第四章RTU系统的软件设计 (28)4.1系统软件的总体设计思想 (28)4.2信号测量模块的软件设计 (28)4.2.1 A/D转换子程序的设计 (30)4.2.2 频率测量程序的设计 (30)4.3通信主控模块的软件设计 (31)4.3.1 CAN接口子程序的设计 (32)4.3.2人机接口子程序的设计 (34)4.4数据测试结果与分析 (35)第五章结论 (37)致谢 (38)参考文献 (39)第1章绪论1.1国内外RTU的发展与现状1.1.1国外RTU的发展现状对于变电站自动化监控系统,很多国家都做了大量的研究工作,目前各在电网计机监控系统方面多采用分层分布开放式系统结构,该系统是把电厂的各项功能,按分层分布处理的原则由功能模块和接口模块组成计算机分布系统,整个系统统一协调,合理分工,最佳运行管理。
远动工作站RTU的主要功能及其通讯系统简介

三、RTU的主要功能
1.远方功能:RTU与调度中心间通过远距离信息传输所 完成的监控功能。
①遥测(YC):RTU将采集到的厂站运行参数按规约上 传给调度中心。包括P、Q、U、I、档位、温度等,容 量达几十到上百路。另外还包括两类特殊YC: a.数字值:RTU以数字量的形式直接接收后上传。 b.计数脉冲:单独的采集(电路)板。主要指RTU采 集的反应电量的脉冲计数。容量可达到几十路电度量 。
(5)调度计算机:类似于远动终端,指调度计算机系统。
五、数据通信的基本概念和信道简介
3.信道简介 信道:指进行通信的通道。 信道的分类:按传输媒介分为有线传输和无线传输两种,有 线信道包括电力载波线、通信电缆、光纤和现场总线等。无 线信道包括无线电广播、微博和卫星通信等。
五、数据通信的基本概念和信道简介
④遥调(YT) :调度中心发给RTU的调整设备运行参数的命令。 包括:改变变压器分接头位置(调压)、改变发电机组P或Q 的整定值(调节出力)、自动装置整定值的设定等。容量可达 几个到十几个设备。
三、RTU的主要功能
⑤事故数据: a.事件顺序记录(SOE):实时检测遥信变位(YXBW)(带时标的遥
信),立即记录变位时刻、变位设备序号、变位状态等组成 SOE优先传送(CDT下)。 b.事故追忆(PDR):冻结某时刻全网的重要的遥测点、遥信点的 画面(如照相),每个这样的画面称为一帧,其循环周期可为 数秒到数分。典型的PDR记录长度为:事故前10min,事故后 5min。
软件组成: ①主程序:系统初始化、人及联系等。 ②终端服务程序:完成RTU输入输出(时钟、A/D服务程 序,通信发送接收终端等)。
四、RTU基本结构
2.多CPU结构的RTU
上级调度或监控中心
RTU-远程测控终端解析
RTU-远程测控终端
RTU (远程测控终端,英文全称 Remote Terminal Unit,中文全称为远程终端控制
系统,负责对现场信号、工业设备的监测和控制。
其中包括:开关量输入单元、开关
量输出单元、模拟量输入单元、模拟量输出单元、脉冲量输入单元、脉冲量输出
单元、数字量输入单元。
开关量输入单元:对现场各种开关信号的采集, 现场信号可以是继电器触点开关(无源 , 也可以是电压信号, 还可以是电流信号。
由于采用光隔离器件,可以抵抗现
场各种干扰,能够在强电场、强磁场、多尘埃、潮湿环境下正常工作。
开关量输出单元:用于遥控远端设备的开停、声光、告警等。
模拟量输入单元:采用模拟开关及光电隔离技术, 将现场各种模拟信号采集进来, 既可以是 4-20mA 、 0-10mA 标准模拟信号;也可以是非标准模拟信号,如交流 220V 等, A/D板采用智能 A/D变换和利用软件技术,可抗工频 50Hz 干扰,射频干扰等,
A/D变换精度高达 14位。
模拟量路路隔离,可以用于不同的地电位设备同时采集。
模拟量输出单元:用于 PID 调节方式下的各种自控系统。
脉冲量输入单元:采集脉冲信号的频率,带光隔。
采集信号的频率范围为
0~20MHz 。
数字量输入单元:接收各种串行数据信号。
可以是 RS485接口, RS232, RS422接口, 或 V11, V28等各种波特率下的异步串行数据。
也可以采集 64K 同步
数据。
RUT 具有的特点是:
1、通讯距离较长
2、用于各种恶劣的工业现场。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
远动终端(RTU)
2.分离元件达林顿驱动电路
图4.38 达林顿驱动电路
返回本节
远动终端(RTU)
遥调操作过程
图4.39 遥调整定命令格式
图4.40 遥调信号输出框图
返回本节
远动终端(RTU)
图4.41 遥调整定命令格式
远动终端(RTU)
应用举例
图4.42 TP STD8506板结构框图
远动终端(RTU)
输入/输出信息的组成
(1)数据信息。
(2)状态信息。
(3)控制信息。
远动终端(RTU)
输入/输出的传送方式
(1)并行传送方式。
(2)串行传送方式。
远动终端(RTU)
输入/输出的典型接口
典型的输入/输出接口电路
远动终端(RTU)
由三态门组成的开关量输入电路
远动终端(RTU)
3.数据采集与预处理模块
远动终端(RTU)
4.遥控监督模块
远动终端(RTU)
5.上行任务管理
远动终端(RTU)
6.下行任务管理
远动终端(RTU)
7.键盘模块
远动终端(RTU)
8.显示模块
远动终端(RTU)
9.通用子程序模块
远动终端(RTU)
10.静态数据库只读
返回本节
远动终端(RTU)
必外接A/D转换采样保持前置放大和模拟量多路开关电路所需的+15VDC电源了。
远动终端(RTU)
图4.28 TP STD 8408板和84C08板的电路结构框图
远动终端(RTU)
1.硬件结构
(1)单极性与双极性的输入方式。 (2)LF-398采集保持电路。 (3)极地噪声、精确、高速运算放大 器OP-27和OP-37。
(3)广播数据模块周期从数据库中取出 各记录的实时值广播到网上,刷新其他各 站的数据库。 (4)网络接收模块接到网上的控制信息 包之后,将该信息(如果为某一点的改变 了的信息)写回到该点记录中。
返回本节
远动终端(RTU)
现场控制站的输入输出软件 一般情况下,现场控制站所处理的输入和输出 按以下几种方式进行: (1)按数据所设定的周期定时巡回输入和输 出,一般由硬件时钟定时激活。 (2)某些事件顺序记录信号的输入是靠硬件 中断来驱动的。
远动终端(RTU)
图 4 26 消 除 接 点 抖 动 的 遥 信 检 测 子 过 程
返回本节
.
远动终端(RTU)
六 遥测量的采集与处理
实例:高精度模拟量采集OEM模板介绍
模拟量的处理
返回本章首页
远动终端(RTU)
图4.27 模拟量采集框图
远动终端(RTU)
实例:高精度模拟量采集OEM模板介绍
(1)8根双向数据线(引脚7-14)。
(2)16根地址线(引脚15-30)。 (3)22根控制线(引脚31—52)。 (4)10根电源线(引脚1—6,53-56)+5V, +12V,逻辑地,辅助地。
远动终端(RTU)
STD总线的技术特点 (1)小板结构,高度的模块化。 (2)严格的标准化,广泛的兼容性。 (3)面向I/O的设计,非常适合工业控 制应用。 (4)高可靠性。
返回本节
远动终端(RTU)
遥信采集中的开关信号防误采集措施
从硬件上采用平滑滤波措施能较好地减少 抖动上报次数,但却使事件发生的确切时 刻模糊了,因为在事件发生时,辅助接点 的第一次变位的时刻,才是事件发生的时 刻。 在软件上采取如图26所示的延时消抖措施 既能有效地消除抖动,又可准确地记录下 事件发生的确切时间。
远动终端(RTU)
例:LD A,0FH
OUT (40H),A
执行完后,K1-K4接通,K5-K8断开。
灵敏继电器输出接点的容量有限,要控制断路器,尚 需接入中间继电器。 图43为STD8506板的开关量的两种输出电路形式。
远动终端(RTU)
(a)用一位开关量控制二个指示灯的电路 (b)用一位开关量控制一个指示灯的电路
l 开关量的采集与处理的过程及原理 l 模拟量的采集与处理的过程及原理 l 典型电路的分析 l RTU软件结构及功能 l 遥控与遥调的原理及过程 l 遥控的可靠性措施 l 通过一些实例的学习以达到对RTU模块的功能的了解。
返回本章首页
远动终端(RTU)
一
RTU的主要功能
1.采集状态量信息
2.采集模拟量测量值
TP STD 8408板和84C08板是具有32路单端模拟量电压输入通道 且转换分辨率为十二位的A/D转换板。 8408板和84C08板还设有前置放大器和采样保持电路。在CPU板 的控制下,8408板和84C08板可对单极性或双极性的模拟量电压 信号做高速实时采集。电路结构框图如图28所示。 8408板和84C08板的不同之处是,8408板上的数字逻辑电路全部 都是TTL型的;84C08板上的数字逻辑电路全部都是CMOS型的。 采用CMOS型的数字逻辑电路可使整板的功耗大大降低,并可增 强板的抗干扰能力,同时也使工作的环境温度得以增宽。用户可不
3.与调度端进行通信
4.被测量越死区传送
5.事件顺序记录(SOE)
6.执行遥控命令
7.系统对时
8.自恢复和自检测功能
返回本章首页
远动终端(RTU)
二 RTU分类
1.集中式微机远动装置 集中式微机远动装置的典型体系结构如图所示。 集中式RTU采用的并行总线一般有三种: (1)796总线(Multibus)。 (2)STD总线。 (3)PCI总线。
(3)为了提高实时性,一般的控制算法可以 直接调用数据库中的数据,经过算法运算,接 着调用输出模块将控制结果直接送往输出通道。
远动终端(RTU)
一个通用现场控制站上一般固化有下列几种 数据处理模块:
(1)开关量输入模块。
(2)开关量输出模块。
(3)模拟量输入模块。 (4)模拟量输出模块。 (5)脉冲量输入模块。 (6)中断处理模块。
4.35
远动终端(RTU)
七 遥控操作输出
1 遥控操作过程 2 遥控输出的开关驱动电路 3 遥调操作过程 4 调度端命令种类
5 应用举例
6 遥控操作过程举例
返回本章首页
远动终端(RTU)
遥控操作过程
(a)为框图 (b)为电路 图4.36 遥控输出部分的硬件电路
返回本节
远动终端(RTU)
遥控输出的开关驱动电路
返回本节
远动终端(RTU)
二 RTU的硬件构成
1 RTU的硬件构成方法 2 STD总线工业控制机简介
返回本章首页
远动终端(RTU)
1 RTU的硬件构成方法
1.片级设计 2.模块级设计 3.系统机级设计
远动终端(RTU)
RTU结构原框图
返回本节
远动终端(RTU)
2 STD总线工业控制机
STD总线引脚定义 STD总线是56条信号线的并行底板总线。
五 遥信量的采集与处理
1 数字量输入/输出的几个基本问题 2 开关量数据处理 3 变电所中状态量采集 4 遥信采集中的开关信号防误采集措施
返回本章首页
远动终端(RTU)
数字量输入/输出的几个基本问题
1.输入/输出信息的组成
2.输入/输出的传送方式
3.输入/输出的典型接口 4.实用开关量采集电路举例
远动终端(RTU)
2.板及通道地址的选择
每块8408板所占用的两个I/O口地址,第一地址控 制通道命令寄存器的选通(I/O写操作选通)和 A/D转换结果数的高8位数据选通(I/O读操作选 通);第二个地址控制启动A/D转换控制器的选通 (I/O写操作选通)和A/D转换结果数的低4位数据 选通(I/O读操作选通)。
由锁存器组成的开关量输入电路
远动终端(RTU)
开关量输出原理电路
远动终端(RTU)
(a)低压开关 量输出 (b)三极管输 出驱动 (c)达林顿管
驱动
图18 低压开关量输出
远动终端(RTU)
继电器输出接口
远动终端(RTU)
开关量数据处理
1.处理原理
(1)异或运算判断变位开关号。
(2)判变位后的状态。 (3)以新代旧。
远动终端(RTU)
3.前置放大器放大倍数的确定
8408板上的前置放大倍数K由下式决定:
(4-1)
远动终端(RTU)
4.8408板的A/D转换公式
8408板的A/D转换公式为:
(4-2)
远动终端(RTU)
5.8408OEM板通道命令字的结构及转换结果的结构
图4.32 通道命令自结构
远动终端(RTU)
远动终端(RTU)
图30 OP-27和OP-37引脚排列图
远动终端(RTU)
1.硬件结构
(4)AD547A 简介。 AD574A的内部 逻辑结构如右图 4.29所示。
远动终端(RTU)
(5)AD574A的部分引脚功能。 1)DB11-DB0(16-27脚):输出数据线。
2)CS(3脚):片选信号,低电平有效。
返回本节
远动终端(RTU)
四 RTU软件
1 现场控制站的软件结构 2 现场控制站的数据结构 3 现场控制站的输入输出软件 4 RTU软件设计
返回本章首页
远动终端(RTU)
现场控制站的软件结构
多数现场控制站软件采用模块化结构 设计,有时甚至不用操作系统。软件 系统一般分为执行代码部分和数据部 分。 现场控制站的执行代码一般分成两个 部分:周期执行部分和随机执行部分。
(4)保存变位信息(或显示),记 录变位时刻。
远动终端(RTU)
事 件 记 录 内 存 分 配
远动终端(RTU)
2.程序框图(如下图24所示)