ADAMS机构设计与分析
adams实验报告
ADAMS动力学建模与分析实验报告实验一、曲柄连杆机构、凸轮机构建模与仿真一、实验目的1、掌握ADAMS基本操作方法,熟悉其操作界面以及软件中常用的建模工具;2、分别建立曲柄连杆机构和凸轮机构的动力学模型,仿真其运动。
二、实验流程(一)、曲柄连杆机构1、启动Adams,设置文件名为“qubingliangang”,进入工作界面,设置菜单栏中setting |working grid,将size栏中的x和y 都设置为300mm,将spacing栏中的x和y都输入5mm,按F4,打开坐标显示框;2、创建曲柄,单击Link,设置数值为9cm*1cm*1cm,单击(0,0,0)处,向右拉伸,单击鼠标。
3、创建摇杆,单击回转图标,单击(0,0,0)和(-120,0,0),设置回转中心线,之后鼠标分别点击(0,5,0),(0,10,0),(-120,10,0),(-120,5,0),(0,5,0),单击鼠标右键,完成;4、创建活塞,单击圆柱创建图标,设置长度和半径分别为21cm和0.5cm,在(0,0,0)处单击,向左延伸。
5,在各铰接点处添加转动副,在摇杆与活塞之间创建圆柱幅,在曲柄上添加动力,设置其转动速度为60r/s,则建模完成;6、单击仿真按钮,设置Duration 为5,Step size为0.0001,单击开始,则可以观察到运动仿真结果,如下所示:(二)、凸轮机构1、启动Adams,设置文件名为“tulun”,进入工作界面,设置菜单栏中setting |working grid,将spacing栏中的x和y都输入10mm,按F4,打开坐标显示框;2、创建凸轮,单击多义线图标,选中下面的closed选项,绘制封闭的多义线,依次点击凸轮外表面上的13个点,选择完毕后单击右键生成凸轮曲线。
然后在(0,-130,0)处创建凸轮转动副;3、创建平动部件,单击多义线图标,取消下面的closed选项,绘制不封闭的多义线,选择该曲线上的11个点,选择完毕后单击鼠标右键,生成该曲线;然后单击BOX图标,在下方的选项中选择Add to part,鼠标点击开放的曲线,之后定义盒子的顶点为(-250,50,0),按住鼠标拖动至(250,180,0),释放鼠标,则可建成平动部件;4、在平动部件与地面之间添加移动副;5、单击凸轮接触图标,点击凸轮部件,再单击其他部件曲线部分,建立线-线接触;6、给凸轮添加旋转运动,speed设置为360d;7、分别建立平动部件的位移测量、速度测量和加速度测量;如下图所示为实验结果:实验二、保龄球运动、平抛运动建模与仿真一、实验目的1、掌握ADAMS基本操作方法,熟悉其操作界面以及软件中常用的建模工具;2、分别建立平抛运动和保龄球运动的动力学模型,仿真其运动。
基于ADAMS的压力机执行机构运动仿真分析

基于ADAMS的压力机执行机构运动仿真分析1. 研究背景与意义:介绍压力机执行机构的运动仿真分析的重要性和现实意义,阐明ADAMS在这个领域发挥的作用。
2. 压力机执行机构运动仿真分析的数学模型:阐述压力机执行机构的数学模型,包括系统结构、系统的动力学模型、运动学约束等,并给出数学方程式。
3. 压力机执行机构运动仿真的模型建立:使用ADAMS软件建立仿真模型,详细介绍模型的建立过程和模型中的各项参数设置,并分析约束的正确性。
4. 压力机执行机构仿真实验结果分析:通过ADAMS仿真,得到模拟结果,并对模拟结果进行分析,包括执行机构的运动轨迹、速度变化、加速度变化等。
5. 压力机执行机构仿真实验结论:通过对仿真实验结果的分析,得出执行机构的动力学变化规律和各种参数的值,总结执行机构的优缺点,并给出改进方案和建议。
6. 参考文献:列出本篇论文参考文献和引用文献。
第1章:研究背景与意义压力机是一种用于连续压制金属、非金属等工件的机械设备,广泛应用于制造业中。
压力机的执行机构是其运动核心,对于压制工件的效率和质量具有重要影响。
为了提高压力机的加工效率和工件质量,必须对其执行机构的运动进行深入研究与优化。
运动仿真分析是一种快速、高精度的评估方法,可以在不消耗过多的实验时间和成本的情况下,研究执行机构的运动性能和各项参数的变化规律,对执行机构进行优化调整。
ADAMS(Automated Dynamic Analysis of Mechanical System)是一种广泛用于动力学仿真和分析、虚拟样机设计和测试等工程领域的软件工具。
它可以模拟机械系统的运动方式、自由度、滑动、碰撞、弹簧、阻尼作用等,进行动态评估和运动优化,为机械系统的设计与优化提供重要技术支持。
因此,本论文旨在使用ADAMS软件对压力机执行机构的运动进行仿真分析,研究执行机构的运动轨迹、速度和加速度等参数变化规律,为压力机的设计和优化提供参考和指导。
基于ADAMS的凸轮机构轮廓曲线设计
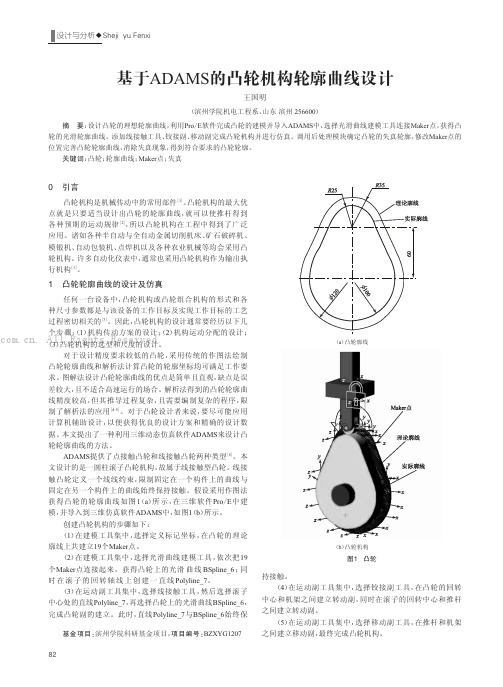
基于ADAMS的凸轮机构轮廓曲线设计王国明(滨州学院机电工程系,山东滨州256600)摘要:设计凸轮的理想轮廓曲线,利用Pro/E软件完成凸轮的建模并导入ADAMS中,选择光滑曲线建模工具连接Maker点,获得凸轮的光滑轮廓曲线。
添加线接触工具、铰接副、移动副完成凸轮机构并进行仿真。
调用后处理模块确定凸轮的失真轮廓,修改Maker点的位置完善凸轮轮廓曲线,消除失真现象,得到符合要求的凸轮轮廓。
关键词:凸轮;轮廓曲线;Maker点;失真0 引言凸轮机构是机械传动中的常用部件[1]。
凸轮机构的最大优点就是只要适当设计出凸轮的轮廓曲线,就可以使推杆得到各种预期的运动规律[2],所以凸轮机构在工程中得到了广泛应用。
诸如各种半自动与全自动金属切削机床、矿石破碎机、模锻机、自动包装机、点焊机以及各种农业机械等均会采用凸轮机构。
许多自动化仪表中,通常也采用凸轮机构作为输出执行机构[3]。
1 凸轮轮廓曲线的设计及仿真任何一台设备中,凸轮机构或凸轮组合机构的形式和各种尺寸参数都是与该设备的工作目标及实现工作目标的工艺过程密切相关的[3]。
因此,凸轮机构的设计通常要经历以下几个步骤:(1)机构传动方案的设计;(2)机构运动分配的设计;(3)凸轮机构的选型和尺度的设计。
对于设计精度要求较低的凸轮,采用传统的作图法绘制凸轮轮廓曲线和解析法计算凸轮的轮廓坐标均可满足工作要求。
图解法设计凸轮轮廓曲线的优点是简单且直观,缺点是误差较大,且不适合高速运行的场合。
解析法得到的凸轮轮廓曲线精度较高,但其推导过程复杂,且需要编制复杂的程序,限制了解析法的应用[4-5]。
对于凸轮设计者来说,要尽可能应用计算机辅助设计,以便获得优良的设计方案和精确的设计数据。
本文提出了一种利用三维动态仿真软件ADAMS来设计凸轮轮廓曲线的方法。
ADAMS提供了点接触凸轮和线接触凸轮两种类型[6]。
本文设计的是一圆柱滚子凸轮机构,故属于线接触型凸轮。
线接触凸轮定义一个线线约束,限制固定在一个构件上的曲线与固定在另一个构件上的曲线始终保持接触。
《ADAMS全面教程》
精选课件
1
主要内容
• 机械系统的组成 • 参考机架 • 坐标系 • 机械系统的自由度 • 速度、加速度和角加速度
精选课件
2
机械系统的组成
• 机械系统是机器和机构的总称,由构件和零件组成。 • 机构由两个以上具有相对运动的构件组成,用于传
递运动或改变运动形式。
• 机器是由若干机构组成的系统。 • 机构的构件既保持接触,又有一定的相对运动。 • 运动副:两构件既保持接触,又有一定的相对运动
精选课件
22
虚拟样机技术 在各主要工业部门都取得显著成就
汽车
铁路、工程机械 航空、航天、国防
精选课件
机械
23
飞机着陆时的起落架变形
精选课件
24
飞机着陆时的起落架变形
精选课件
25
ADAMS/PPT (后处理)
精选课件
26
液压+机械仿真
Hydraulic + Mechanical Simulation
维护方便吗 ?
满足要求 ?
能做出来吗 ?
做什么样的 ?
能工作吗 ?
可靠精吗选课?件
35
Reduced Risk Through Better Information
Concept
Design
Validate Assembly Service
With Virtual Prototyping
IMPROVEMENT
• Edit (编辑)
• View (视窗)
• Build (建模)
• Simulation (仿真)
• Review (观察)
• Settings (设置)
基于ADAMS的液压挖掘机铲斗机构优化

基于ADAMS的液压挖掘机铲斗机构优化液压挖掘机铲斗机构是挖掘机的重要组成部分,其性能直接影响挖掘机的作业效率和稳定性。
为了优化液压挖掘机铲斗机构的性能,可以基于ADAMS进行建模和优化。
首先,可以使用ADAMS对液压挖掘机铲斗机构进行三维建模。
ADAMS 具有强大的建模能力,能够准确地描述物体的运动学和动力学特性。
通过建模,可以获得液压挖掘机铲斗机构的运动学和动力学参数,包括关节的位置、速度、加速度等。
这些参数对于优化设计是非常重要的。
其次,可以利用ADAMS进行动力学分析。
通过对液压挖掘机铲斗机构的动力学分析,可以确定其在工作过程中的受力情况和更好地理解其工作原理。
动力学分析可以揭示铲斗在不同工况下的受力特点,帮助我们理解其结构强度和稳定性,并为优化设计提供依据。
然后,可以使用ADAMS进行逆向优化。
通过将液压挖掘机铲斗机构的性能指标设为目标函数,将设计变量(如关节长度、连接方式等)设为待优化的参数,利用ADAMS的优化算法进行和调整,以找到使目标函数最小化的最佳设计方案。
通过逆向优化,可以根据实际需求来优化液压挖掘机铲斗机构的设计,提高其工作效率和稳定性。
最后,可以利用ADAMS进行静态和动态仿真。
通过仿真,可以验证优化后的液压挖掘机铲斗机构的性能是否满足设计要求,并对其工作过程进行评估和预测。
静态仿真可以检验铲斗机构的稳定性和载荷承受能力,而动态仿真可以模拟实际工作环境下的挖掘机作业过程,进一步验证其性能和可靠性。
综上所述,基于ADAMS的液压挖掘机铲斗机构优化可以通过建模、动力学分析、逆向优化和仿真等步骤进行。
通过这一过程,可以得到性能更优的液压挖掘机铲斗机构设计,提高挖掘机的作业效率和稳定性。
Adams实例操作

夹紧机构的建模、分析及优化设计并优化一个夹紧机构,要求:1. 能产生至少800N的夹紧力。
2. 手动夹紧,用力不大于80N。
1 创建模型1.1 新建模型启动ADAMS/View,在欢迎对话框中选择New Model新建模型,在模型名称输入框中输入latch,将单位设置成MMKS,如图1-1所示。
图1-11.2设置工作环境单击菜单【Setting】 【Units】,将长度单位设置为厘米Centimeter。
在【Setting】菜单中选择【Working Grid】,在工作栅格设置对话框中,将工作栅格的X和Y尺寸(Size)设置为25,间距(Spacing)设置为1。
单击菜单【Setting】→【Icons】,弹出Icons设置对话框,将Model Icons 的所有缺省尺寸改为2。
1.3 建立参考点在【Bodies】→【Construction】中选择Point按钮,按照表1-1所列数据放置设计参考点。
点的设置选择Add to Ground和Don’t Attach。
Point table→create→apply,如图1-2所示。
表1-1图1-21.4 创建摇臂在【Bodies】→【Solids】中选择Plate按钮,将厚度与半径均设置成1cm,用鼠标左键点选Point_1、Point_2和Point_3,点击右键使曲柄闭合,如图1-2所示。
右键点击Part,选择Rename对模型进行重命名,命名为Pivot。
图1-21.5 创建手柄在【Bodies】→【Solids】中选择Link按钮,用鼠标左键点选Point_3、Point_4,创建连杆,如图1-3所示,并改名为Handle。
图1-31.6创建锁钩在【Bodies】→【Solids】中选择Extrusion按钮,选择“New Part”和“Closed”,设置“Length”为1cm,单击键盘上的F4,打开坐标窗口。
鼠标左键选择表1-2中11个位置,右键完成创建,如图1-4所示。
槽轮机构ADAMS机构分析报告
槽轮机构ADAMS机构分析报告一.题目分析1、题目题20图1如上图所示,这个设计将一个行星轮并入到传动机构中来。
输出轴的运动周期减少,最大角速度比具有相同沟槽数的未改进的槽轮机构的大。
曲柄轮的一个驱动单元由行星轮b和传动滚c组成。
传动滚轴与行星节圆上的一点同线。
因为行星轮沿固定的太阳轮d转动,传动滚c轴的轨迹是一个心形的曲线e。
为防止圆滚妨碍锁紧盘f,弧度g应该比未改进时槽轮所要求的大。
2、机构运动简图(1)太阳轮:模数5,齿数40,厚50mm(2)行星轮:模数5,齿数40,厚50mm,孔径d=40(3)锁紧盘:直径500111111,圆弧直径320mm,厚40mm(4)槽轮:直径500mm,槽宽30mm,长宽为:480mm,厚度40mm(5)传动滚:长100mm,宽80inm,厚20mm,滚直径30mm(6)输入圆盘:直径450nun,孔径40mm,厚50mm二、分析目的根据题意,要求输入盘,每转动一圈,槽轮就转过90°,并且不断循环下去。
从动力传递的顺序来分析,动力是由输入盘传递给传动滚与行星轮组成的曲柄轮,然后由传动滚传递给槽轮,再由槽轮轮传递给输出轴,因为行星轮与太阳轮之间的齿轮副的传动是平稳的,所以输出轴的一些运动信息可以通过对槽轮的测量来获取。
下面将对槽轮转动的情况做简要的分析:1、运动要求:若以图2所示位置为初始位置,输入盘的转动方向为顺时针,当输入盘转动时带动曲柄轮转动,同时传动滚与槽轮接触并带动槽轮转动,当输入盘转过一定角度时,传动滚与槽轮分离,锁止盘与槽轮接合将槽轮锁止,槽轮不转动,当输入盘再次转过一定角度后,锁止盘与槽轮分离,传动滚再次与槽轮接合带动槽轮转动,槽轮就是如此间歇运行下去。
图32、力的要求:在实际机构中,总是存在着各种各样的摩擦,因此在槽轮与输入盘的转动副上需要添加摩擦力;在传动滚与槽轮以及锁止盘与槽轮接合时应该添加接触力,接触时会有能量的损失,所以在接触力的设置时应有摩擦的设置。
adams分析报告
ADAMS机构分析报告一题目描述题目:两个支点和中间法兰盘对夯锤切割次序的控制图1所示的机构在行程中自动地从一个支点换到另一个支点。
图1 法兰和夯锤组成的切割机换向机构1.运行情况如图1中(A)可知,法兰盘被安装在切割机机架的上支点上,而切割夯锤在下支点与法兰盘相连。
法兰盘下端连接有法兰支撑活塞,夯锤中间有止推块,下端有刀片。
在循环工作开始时,夯锤绕着下支点旋转并用方型刀片切割平板;中间法兰盘的运动受到法兰支撑活塞的限制。
在切割后,夯锤停在法兰盘的底部,如图1(B)所示。
之后,有切割力作用的夯锤克服了法兰支撑活塞的约束力,并且夯锤绕着上支点转动。
从而使得斜向刀刃对平板做斜向切割。
2. 实现的功能在切割力作用下夯锤开始运动时,由于法兰盘有法兰支撑活塞,法兰盘不转动,夯锤绕下支点转动,用方型刀片切割平板。
之后由于夯锤止推块的作用使夯锤停在法兰盘的下端,之后克服了法兰支撑活塞的约束力,并绕上支点转动,从而实现夯锤不要更换刀片即可改变切割方向。
二.机构的运动简图及自由度机构的运动简图如图2、图3所示:图2 机构的运动简图图3 机构的三维渲染运动简图自由度的计算:DOF=∑--ii n n )1(6=2三.大致确定其运动尺寸机构的运动尺寸如图4所示:图4 转位机构的大致尺寸四.分析目的分析机构能否达到题目中描述的运动要求,即夯锤可否绕设计点旋转, 实现在不更换刀片的前提下,改变刀片切割方向。
五.模型描述图5 机构分析图1机构的构建该机构构件数量少,主要由夯锤、中间法兰盘组成,且各组成构件结构简单,利用adams 建模即可完成,无需通过专业CAD建模。
(1)夯锤的建立夯锤结构简单,有多种方法建立,首先建立三个marker点,分别为marker19、marker15、marker2。
然后先去工具箱中拉伸命令,设置如图6所示,用点来创建,并选择close,表示选取曲线闭合,之后分别点取marker19、marker15、marker2,点击鼠标右键,第一个构件建立完毕。
毕业设计(论文)-发动机曲轴连杆机构仿真及有限元分析设计-adams
全套图纸加扣 3012250582曲轴连杆活塞组件虚拟样机的建立学院名称:机械工程学院专业班级:机械设计制造及其自动化0501 班学生姓名:号:学指导教师:2009 年6 月摘要柴油机的气缸、活塞、连杆、曲轴以及主轴承组成一个曲柄连杆机构。
柴油机通过曲柄连杆机构,将活塞的往复运动转换为曲轴的回转运动,使气缸内燃油燃烧所产生的热能转变为曲轴输出的机械功。
可见,曲柄连杆机构是柴油机重要的传力机构。
对其运动和受力情况进行分析和研究,是十分必要的。
这种分析研究既是解决柴油机的平衡、振动和总体设计等课题的基础,也是对其主要零部件在强度、刚度、磨损等方面进行计算和校验时的依据。
本文在曲柄连杆机构理论分析的基础上,利用多体动力学理论,三维造型软件Pro/E 及动力学分析软件ADAMS对内燃机曲柄连杆机构的动力学问题进行了虚拟样机仿真分析。
并以CT484Q柴油机为研究对象,在Pro/E中建立CT484柴油机曲柄连杆机构的虚拟样机模型,导入ADAMS中进行动力学分析,绘制出虚拟样机模型中各连接位置处受力仿真结果曲线。
通过本文的研究,展示了一种简捷、高效的机械设计分析手段,对今后同类型的研究乃至更大规模的仿真分析积累了一些经验。
本文的研究也可以为今后内燃机机构的造型、优化设计提供参考依据。
关键词:内燃机,曲柄连杆机构,ADAMS,虚拟样机,仿真AbstractThe Cylinder, piston, connecting rod, crankshaft and main bearings of diesel engine Compose of a crank-connecting rod mechanism. Through the crank-connecting rod mechanism, Diesel engine convert the piston reciprocating motion to the rotary movement of the crankshaft, and make the cylinder generated by fuel combustion energy into mechanical work output of the crankshaft. This shows that diesel engine crank linkage is an important body for transmission force. It is necessary to analysis and research its movement and force. This analysis is the foundation to solve the balance of diesel engine, vibration and overall design, It is the basis for validate and calculate the strength, stiffness, wear, etc.In this paper, based on the theoretical analysis of crank-connecting rod mechanism, use of multi-body dynamics theory, and use the three-dimensional modeling software, Pro/ E and the dynamic analysis software ADAMS to carry out crank and connecting rod for internal combustion engine body dynamics simulation of a virtual prototype simulation. And study CT484Q Diesel Engine, established linkage of the virtual prototype of diesel engine model In Pro/ E, then do dynamic analysis in ADAMS and draw the connection position of the power curve for the simulation result.Through this paper, the study demonstrated a simple and efficient means of mechanical design and analysis for future research as well as the same type of simulation analysis and accumulate some experience. The study of this paper can provide reference for the modeling and optimal design.Key words: Internal Combustion Engine, Crank-connecting rod mechanism, ADAMS, Virtual Prototyping目录第一章绪论··················································1.1 研究的意义···············································1.2 内燃机曲柄连杆机构的工作特点以及难点·····························1.3 国内外研究及手段···········································1.3.1计算机辅助设计(CAD)·····································1.3.2 多体动力学分析(MBS)···································1.3.3 有限元分析···········································1.3.4优化设计理论··········································1.4 主要研究内容和方法··········································第二章曲柄连杆机构的动力学理论分析·······························2.1 内燃机工作过程分析··········································2.1.1压缩始点气体状态·········································2.1.2压缩终点气体状态········································2.1.3燃烧过程及燃烧终点气体状态·································2.1.4膨胀终点气体状态········································2.2 曲柄连杆机构的运动分析·······································2.3曲柄连杆机构的动力学分析······································2.3.1曲柄连杆机构的质量换算····································2.3.2曲柄连杆机构的惯性力和惯性力矩······························2.3.3曲柄连杆机构的动力学分析··································2.4 内燃机工作过程计算··········································第三章曲轴连杆活塞组件的虚拟样机································3.1Pro/E 系统的建模原理及其特点····································3.1.1参数化设计············································3.1.2 特征建模的基本思想······································3.1.3全相关的单一数据库······································3.2 曲柄、连杆、活塞组件几何模型的建立以及装配··························3.2.1活塞组件的建模·········································3.2.2 连杆组建的建模········································3.2.3曲轴组件的建模·········································3.2.4曲轴连杆活塞组件的总装配···································第四章曲柄连杆机构的运动学和动力学分析·····························4.1ADAMS简介及其基本原理·······································4.1.1 运动学和动力学基本概念···································4.1.2 ADAMS中多刚体动力写方程的建立······························4.2ADAMS 中的运动学和动力学分析···································4.2.1 曲柄连杆机构刚体模型的转化和输入·····························4.2.2 曲轴轴系多刚体动力学仿真分析·······························第五章结论与展望·············································5.1 总结····················································5.2 展望····················································致谢························································参考文献·····················································附录·························································第一章绪论1.1研究的意义内燃机是目前世界上应用最广泛的热动力装置,自1860年法国人设计出第一台煤气发动机以来,内燃机无论是在结构上还是在性能上都较以前有了很大的进步。
185 基于Adams五点斜排机构的分析与设计
基于 Adams五点斜排机构的分析与设计中文摘要针对现有注塑机的设计上的合模机构存在移模运动不顺畅,不够理想的情况。
首 先用Solidworks对注塑机的双肘五点斜排机构建立模型,进行理论分析,确定该机构 实现慢—快—慢的理想运动特性的工作区间。
在一定的条件下进行优化,最后设计一 组更优的解。
本课题将全部力量集中在这个关键问题的分析上,严格运用方案设计的 求解方法, 用三维CAD软件Solidworks建立注塑机合模机构各零件、 装配体的实体模型, 并利用采用现代虚拟样机技术的运动仿真软件对所选方案进行计算机辅助运动学仿真 研究,从本质上解决五点斜排合模机构的效率和可靠性。
关键词注塑机 改进 优化 运动仿真外文摘要Title Computer Aided DesignAbstractIn a clamping unit of injection molding machine, it has the problem that clamping unit cannot move smoothly and its not satisfy ours mind.First of all,I applied the Solidworks software,set up a numerical model to analyze the moving of clamping unit and its characteristic for searching the reasons.Based on the characteristic of joint—double five— point toggle clamping unit,we established its optimum model, analyzed its characteristic.For testing and verify the results,we applied the Adams software to set up the three dimensional model of clamping unit and to simulate its moving。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
曲柄滑块机构的仿真与分析:图中件1、2、为齿轮,按圆柱建模,其中齿轮2半径350mm、厚度50mm;齿轮1半径150mm、厚度40mm;件3连杆(宽150mm;厚60mm)、件4长方体滑块(长600mm、宽300mm、高400mm),要求整个模型与栅格成对称状态。
其中:齿轮1材料密度为7.8 10-3kg/cm2;连杆3质量Q=65kg,惯性矩Ixx=0.132kg.m2,Iyy=6.80kg.m2,Izz=6.91kg.m2;滑块4材料为铝。
绘图步骤简介:步骤1:启动ADAMS/View程序1)选择MD Adams>Adams-view MD 20102)在打开的对话框中选择create a new model 。
3)选择start in 后在单击,在自己指定的工作目录下新建的一个文件夹,以保存样机模型。
4)在model name栏中输入模型名称:model_lixiang5)在gravity选项栏中选择earth normal(-global Y)。
6)在units文本框设定为MMKS—mm、kg、N、s、deg 。
7)单击ok按钮。
如图:步骤2:设定建模环境1)选择settings>working grid,按图所示进行设置工作栅格大小及间距。
2)单击ok按钮,可看到工作栅格已经改变。
3)在主工具箱中选择,显示view控制图标。
4)按F键或在主工具箱中单击,可看到整个工作栅格。
步骤3:样机建模1、创建设计点1)在集合建模工具集中,单击点工具图标2)在主工具箱的选项栏中选择添加到零件上add to ground。
3)在建模视窗中,先点击ground,再选择该点,点击右键,打开修改点对话框,修改坐标为A(-800,-20,20),重复此过程,依次创建点B(-300,0,25)、C(0,0,0)、D(1000,0,0)2、创建驱动齿轮11)在集合建模工具集中,单击圆柱工具图标、。
2)在主工具箱的选项栏中选择新零件new part3)在长度选项输入40mm、半径选项输入150mm,如图(1)。
4)在建模视窗中,点击点(-800,-20,20),水平拖动鼠标至点的右边点击,创建圆柱体5)旋转圆柱体与屏幕垂直:鼠标放在圆柱体左端附近,点击右键,选择标记点marker菜单,打开修改对话框,orientation 角度Y改为180 ,创建结果如图(2)。
(图1)(图2)3、创建从动齿轮21)在集合建模工具集中,单击圆柱工具图标、。
2)在主工具箱的选项栏中选择新零件new part3)在长度选项输入50mm、半径选项输入350mm4)在建模视窗中,点击点(-300,0,0),水平拖动鼠标至点的右边点击,创建圆柱体5)旋转圆柱体与屏幕垂直:鼠标放在圆柱体左端附近,点击右键,选择标记点marker菜单,打开修改对话框,(location的z坐标改为-25,创建点时已处理)orientation 角度Y改为180。
创建完成后的模型如图。
4、创建连杆1)在集合建模工具集中,单击连杆工具图标2)在主工具箱的选项栏中选择新零件3)在长、宽、厚选项分别输入1000mm、150mm、60mm4)在建模视窗中,选择点(0,0,0),然后在右侧横坐标轴上选择一点,定义连杆方向,创建连杆,如图。
5、创建滑块1)在集合建模工具集中,单击工具图标、。
2)在主工具箱的选项栏中选择新零件3)在长、高、厚选项分别输入600mm、300mm、400mm4)在建模视窗中,选择点(1000,0,0),创建滑块5)移动长方体与栅格对称,轴对称显示模型:鼠标放在长方体左上端附近,点击右键,选择标记点marker菜单,打开修改对话框,location的z坐标改为-200。
结果如图:6、创建运动副1)在主工具箱中选择、。
2)在construction选项框中选择one location 和normal to grid 。
3)在建模视窗中选择ground.point_1并单击鼠标左键4)重复以上过程,选择ground.point_2并单击鼠标左键,如此,两齿轮的旋转运动副构建成功。
两齿轮的创建结果如图:5)在主工具箱中选择、6)在construction选项框中选择2-body-loc和normal to grid 。
first body 和second body 都设为pick body 。
7)在建模视窗中依次选择gear2 、link 、ground.point_3并单击鼠标左键8)重复以上过程,依次选择link 、box 、ground.point_4并单击鼠标左键,如此,连杆和滑块的旋转运动副构建成功。
创建结果如图:7、创建平移运动副1)在主工具箱中选择、2)在construction选项框中选择2-body-loc和normal to grid 。
first body 和second body 都设为pick body 。
3)在建模视窗中依次选择box、ground、ground.point_4并单击鼠标左键,当出现一个水平方向的箭头时,单击鼠标左键,平移运动副创建完成。
8、创建齿轮副1)在主工具箱中选择、2)在mark对应选项中设置add to ground ,orientation 为global XZ 。
3)在两齿轮交点附近单击鼠标左键,在该点单击鼠标右键,修改坐标值为(-650,-14,0)单击ok按钮。
如上图。
4)在工具栏中选择5)在joint name 栏中,单击鼠标右键,选择pick ,再选择两齿轮的旋转副。
6)在common velocity marker 栏中用同样的选择刚创建的标记点。
结果如图:单击ok按钮,即完成齿轮副的创建。
9、设置Drive _Gear的初始速度1)在主工具箱中选择、2)在drive _gear的旋转副(joint_1)3)双击新建的motion_1或在drive _gear 的旋转副附近右击鼠标,在motion_1下级菜单中选择modify,按下图所示进行设置,单击ok按钮。
4)至此所有的运动副已添加完成,选择、,如下图所示。
10、修改零件物理特性(1)鼠标放在连杆3上,点击右键,依次选择part-4,modify, 打开修开对话框(2)在category 中选择mass properties;在define mass by中选择user input(3)在mass、Ixx、Iyy、Izz中分别输入连杆质量60kg、惯性矩0.132、6.80、6.91,点击ok 退出修改对话框。
(8)按上述方法修改滑块的材料:鼠标放在滑块4上,点击右键,依次选择part-4,modify, 打开修开对话框在category 中选择mass properties;在define mass by中选择geometry material type; 在material type中点右键,browse,选择铝(9)对照上述方法,修改齿轮1的物理特性。
步骤4:样机的运动学仿真1、运动仿真1)在住工具箱中选择,再单击。
按图所示进行设置,单击,开始仿真分析。
2)选择Simulation> Scriped control ,在对话框中单击,并在随后的对话框中输入kinematic,单击ok按钮。
2、仿真回放在住工具箱中单击,根据第4章内容,选择合适的回放方式进行操作。
3、确定滑块的位移、速度和加速度的对应关系(1)利用测量(measure)方式,用鼠标右键单击滑块,在slider下级菜单中选择measure如图(a),出现创建测量曲线对话框。
首先按(图b)所示的内容进行设置,单击apply按钮,完成滑块的位移曲线绘制,然后按下面的内容进行滑块的速度曲线和加速度曲线绘制:(图a) (图b)1)measure name :lixiang.Part_5 _velocit 。
2)part :part3)component :X4)characteristic :CM velocity 。
5)单击apply 按钮,完成滑块的速度曲线绘制。
6)measure name :lixiang.part_5_ acceleration 。
7)part :part8)component :X9)characteristic :CM acceleration 。
10)单击apply 按钮,完成滑块的加速度曲线绘制。
图1.(滑块位移曲线)图2.(滑块速度曲线)图3.(滑块加速度曲线)图4.(plot快捷命令)在(如图b)中选择create strip chart,则单击apply或ok按钮后会同时出现相应的测量曲线;也可选择build>measure>display,在出现的数据库中浏览器中选择相应的测量曲线,单击ok按钮,现实相应的测量曲线,分别如图1、2、3所示。
如在测量曲线图上空白处单击鼠标右键,在plot:scht1下级菜单中选择transfer to full plot ,如图4即可进入后处理程序postprocessor,相应的曲线也自动被添加到绘图区。
(2)利用postprocessor1)在住工具箱中单击,启动postprocessor程序。
2)在图形控制区域的source栏中选择object,并按图5.所示在filter栏中选择body。
(图5)3)在object选择栏中选择构件part_5。
4)按下ctrl键,在characteristic栏中选择CM_ position、CM_ V elocity、CM_ Acceleration,在Componer栏中选择X,然后单击add curves按钮,可看到如图5所示内容。
也可在source栏中选择measure,在simulation栏中选择kinematic,在measure选择项中按住ctrl键选择box_ position、box_ velocity、box_ acceleration(见图c)然后单击add curves按钮,同样可以看到如图5所示的内容。
14、录制动画在postprocessor的工具栏中单击,在曲线绘制区域单击鼠标右键,选择load animation,或在view菜单选项中选择load animation,再出现的数据库浏览器中选择kinematic,单击ok按钮。
武汉纺织大学外经贸学院 2012届 ADAMS 机构设计与仿真分析范例第 11 页 共 11 页 利用第七章的操作方法,选择合适的的动画播放方式,然后在file 菜单中选择select direction ,在出现的对话框中选择要录制的动画要存放的位置。
单击,系统自动开始录制。
15、保存数据 单击postprocessor工具栏中的,返回到ADAMS/View 工作界面。