卡西欧fx-4800测量计算程序
卡西欧计算器坐标计算程序4800
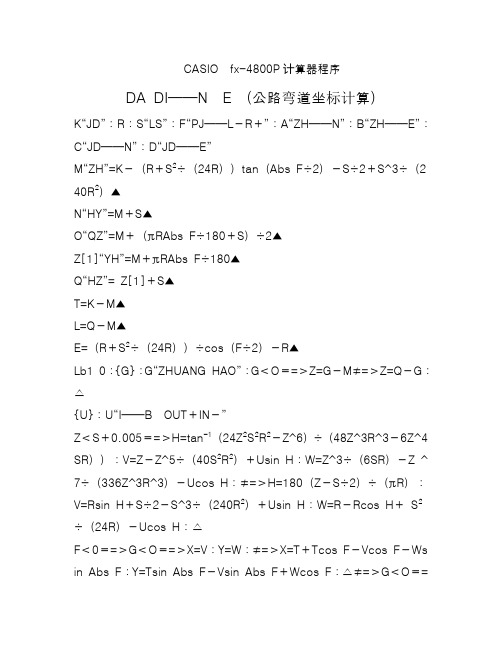
CASIO fx-4800P计算器程序DA DI——N E (公路弯道坐标计算)K“JD”:R:S“LS”:F“PJ——L-R+”:A“ZH——N”:B“ZH——E”:C“JD——N”:D“JD——E”M“ZH”=K-(R+S2÷(24R))tan(Abs F÷2)-S÷2+S^3÷(2 40R2)▲N“HY”=M+S▲O“QZ”=M+(πRAbs F÷180+S)÷2▲Z[1]“YH”=M+πRAbs F÷180▲Q“HZ”= Z[1]+S▲T=K-M▲L=Q-M▲E=(R+S2÷(24R))÷cos(F÷2)-R▲Lb1 0:{G}:G“ZHUANG HAO”:G<O==>Z=G-M≠=>Z=Q-G:△{U}:U“I——B OUT+IN-”Z<S+0.005==>H=tan-1(24Z2S2R2-Z^6)÷(48Z^3R^3-6Z^4 SR)):V=Z-Z^5÷(40S2R2)+Usin H:W=Z^3÷(6SR)-Z ^ 7÷(336Z^3R^3)-Ucos H:≠=>H=180(Z-S÷2)÷(πR):V=Rsin H+S÷2-S^3÷(240R2)+Usin H:W=R-Rcos H+S2÷(24R)-Ucos H:△F<0==>G<O==>X=V:Y=W:≠=>X=T+Tcos F-Vcos F-Ws in Abs F:Y=Tsin Abs F-Vsin Abs F+Wcos F:△≠=>G<O==>X=V:Y=-W:≠=>X=T+Tcos F-Vcos F-Wsin Abs F:Y=Vsi n Abs F-Tsin Abs F-Wcos F:△△C=A==>D≥B==>P=90:≠=>P=270:△≠=>C<A==>P= tan-1((D-B)÷(C-A))+180:≠=>P= tan-1((D-B)÷(C-A)):△△I“COM——N”=A+√(X2+Y2)cos(P-tan-1(Y÷X))▲J“COM——E”=B+√(X2+Y2)sin(P-tan-1(Y÷X))▲G=G+20Goto 0程序运行输入:JD?——交点桩号R?——圆曲线半径LS?——缓和曲线长度PJ——L-R+?——偏角右偏为正ZH——N?——ZH点N坐标ZH——E?——ZH点E坐标JD——N?——JD点N坐标JD——E?——JD点E坐标输出:ZH= ——ZH点桩号HY= ——HY点桩号QZ= ——QZ点桩号YH= ——YH点桩号HZ= ——HZ点桩号T= ——切线长L= ——曲线长E= ——外矢距再输入:ZHUANG HAO?——输入任一点桩号I——B OUT+IN-?——距中线距离(外侧为正)再输出:COM——N= ——计算出N坐标COM——E= ——计算出E坐标以此循环——再输入——再输出程序中各字母所代表的含义:A——ZH点N坐标B——ZH点E坐标C——JD点N坐标D——JD点E坐标E——外矢距F——偏角(右偏为正)G——弯道内任一点桩号H——弯道内任一点切线角I——计算出的N坐标J——计算出的E坐标K——交点桩号L——曲线长M——ZH点桩号N——HY点桩号O——QZ点桩号P——ZH--JD方位角Q——HZ点桩号R——圆曲线半径S——缓和曲线长度T——切线长U——距中线距离(外侧为正)V——支距W——支距X——弯道内坐标Y——弯道内坐标Z——任一点曲线长度Z[1]——YH点桩号。
4800程序

卡西欧Fx-4800P计算器测量程序一、坐标放样源程序ZBFYU“Xc”:M“Yc”:O“XH”:Q“YH”:I=O-U:J=Q-M: Pol(I,J):J<0=>J=J+360:≠>J=J:⊿T“HF” =J◢I“HL”◢X=0=>W“XQ” =U+Lcos(T+P“a”)◢S“YQ” =M+Lsin(T+P)◢≠>I=X-U:J=Y-M: Pol(I,J):J<0=>J=J+360:≠>J=J⊿I“QL=”◢H“QF” =J◢J=H-T:J<0=>J=J+360◢≠>J=J使用说明:XH—后视点X坐标 YH—后视点Y坐标XC—置镜点X坐标 YC—置镜点Y坐标HF—后视方位角 QF—前视方位角HL—后视距离 QL—前视距离X、Y—前视点坐标 J—仪器后视归零后拨角当X=0时运行坐标反算QL—测设点到置镜点的距离а—测设点与后视点夹角XQ—测设点的X坐标 YQ—测设点的Y坐标二、复合辛卜生公式计算曲线元坐标源程序XBS—XY(已知里程求坐标)A“QD”:Z“ZD”:R“R0”:V“RN”:D“X0”:E“Y0”:F“F0”:K:L“B”:P“а”:J:Prog “SIM1”:W<0=>W=W+360:≠>W=W⊿W“FWI=”◢X=X◢Y=Y◢XBS—L、B(已知坐标求里程和边距)A“QD”:Z“ZD”:R“R0”:V“RN”:D“X0”:E“Y0”:F“F0”:K”K”(输入大致里程)I=X:B=Y:K=A+Abs((Y-E)cos(F+P“a”-180)+(X-D)sin(F+P-180):Lbl 1:L=0:Prog“SIM1”:C=(B-Y)cos(W+P-180)- (I-X)sin(W+P-180): AbsC<10∧-4=>Goto2: ≠>K=K+C∶Goto1:⊿Lbl2:L=0:Prog“SIM1”:C=(B-Y)÷sin(W+P):K=K◢C“B=”◢子程序SIM1T=(J÷V-J÷R)÷(Z-A)H=(K-A)÷NS=90H÷πW=F+((TNH+J÷R)+J÷R)NS: G=1:X=D+H÷6×(cosF+cosW+4×Σ(cos(F+((G+0.5)HT+2J÷R)(G+0.5)S),G,0,(N-1))+2Σ(cos(F+(THG+2J÷R)GS,G,1, (N-1)))+Lcos(W+P):Y=E+H÷6×(sinF+sinW+4×Σ(sin(F+((G+0.5)HT+2J÷R)(G+0.5)S,G,0,(N-1))+2×Σ(sin(F+(THG+2J÷R)GS,G,1,(N-1)))+Lsin(W+P)使用说明:QD—起点里程 ZD—终点里程R0—起点半径 RN—终点半径J—曲线转向 (左转为-1 直线为0 右转为+1)X0、Y0—线元起点坐标 F0—起点方位角K—待求点里程 N—计算精度(可取4~12的整数)а—边桩与中线右交角 B—边桩到中桩的距离,左“-”右“+”X、Y —待求点坐标 K—待求点里程三、数据库的编制以每个线元为一段先付参数值,例K≥542.759=>K≤686.148=>A”起点里程”=542.7590:Z终点里程=163.5:R起点半径=10^45: V终点半径=10^45:D起点坐标=22236.147:E起点坐标=32145.669:F起点切线方位角=81°22′42″:J=0:⊿⊿K≥987.324=>K<10234.021=>A=……J=-1⊿⊿……Prog“XBS—XY”四、纵断高程计算Lbi 0R:T:D”K(JD)”:H”H(JD)”:U”I1”:V”I2”:{K}V>U=>G=1:≠>V<U=>G=-1⊿⊿K≤D-T=>L=D-KP=H-LU/100≠>K≤D=>L=K-D+TP=H-U(D-K)/100+GL2/2R≠>K≤D+T=>L=D+T-KP=H+V(K-D)/100+GL2/2R≠>K>D+T=>L=K-DP=H+LV/100⊿⊿⊿⊿P”H=”▲Goto 0H:高程、 K:变坡点里程、H:变坡点高程、I1、I2前后坡度五、中轴旋转、超高计算: (1)IR,(2)IL线路左转输2,W(Z):中分带宽度,K:桩号,H(Z):中桩设计高程,W(L)左侧宽度,W(R):右侧宽度Lbi 1G”(1)IR,(2)IL”:D”K(ZH)”:S”LS1”:H”LS2”:Q”LY”:W”W(Z)”:I”I1”:J”IB”{KVAE}:K:V”h(Z)”:A”W(L)”:E”W(R)”G=2=>G=-1⊿{KPAB}:K:P”H(Z)”:A”W(L)”:B”W(R)”Prog”XZ”:U”H(L)=”▲V”H(R)=”▲Goto11、子程序:XZG=1=>U=A:V=B:≠>G=-1=>U=B:V=A⊿⊿K≤D=>R=P-I(U-W/2)/100:E=P-I(V-W/2)/100:≠>K≤D+S=>Prog”ZXA”: ≠>K≤D+S+Q=>R=P+J(U-W/2)/100:E=P-J(V-W/2)/100: ≠>K≤D+S+Q+H=>Prog”ZXB”: ≠>K>D+S+Q+H=>R=P-I(U-W/2)/100:E=P-I(V-W/2)/100⊿⊿⊿⊿⊿G=1=>U=R:V=E: ≠>G=-1=>U=E:V=R⊿⊿2、子程序: ZXAL=K-DR=P-I(U-W/2)/100+L(U-W/2)(I+J)/100SL≤2IS/(I+J) =>E=P-I(V-W/2)/100: ≠>L>2IS/(I+J) =>E=P-LJ(V-W/2)/100S ⊿⊿3、子程序: ZXBL=D+S+Q+H-KR=P-I(U-W/2)/100+L(U-W/2)(I+J)/100HL≤2IH/(I+J) =>E=P-I(V-W/2)/100: ≠>L>2IH/(I+J) =>E=P-IJ(V-W/2)/100H ⊿⊿六:边轴旋转超高计算:L:平曲线长度,I1正常横坡,IB超高横坡。
CASiO fx-4800计算器程序

CASiO fx-4800计算器程序1、CE ZHANFix3:Prog"X":U=X:V=Y:Prog"X":X=X:Y=Y:Fixm:Pol(X-U,Y-V:Pause0:W=J:J<0=>J=J+360△IntJ+.01(.6Fr ac 60J+Int(60 FracJ:Fix 4:J"D,F"= Ans2、QU XIANFix3:L"K+"D"B÷2":Fixm:AbsD<3E 3=>Prog"Q":≠>X=L:Y=D △X:Pause0:Y"N,E="◢Pol ( X-U ,Y-V:Pause0: J <0=>J=J+360△IntJ+.01( .6 Frac 60J+Int(60 FracJ:Fix 4:J"D,FWJ"=Ans3、X{NXY}:N=控制点编号=>X=控制点X 坐标:Y=控制点Y 坐标△N=下个控制点编号=>X=下个控制点X 坐标:Y=下个控制点Y 坐标△……X:Pause0:Y4、QProg"SJ":Prog"P":C=L-H:C>.5B=>K=B-C:≠>K=C △K>0=>K≤S=>A=RS:X=K -K 5÷40A 2:Y=K 3÷6A -K 7÷336A 3:≠>A=180(K-S)÷πR+M:Y=R(1-cosA)+W:X=RsinA+Z [1△Pol(X,Y:≠>I=K:J=0△E-F>0=>C<.5B=>X=N+Rec(I,J+F:Y=J+Q:Prog"J":J=Ans+F:≠>J=-J:Prog"K":C=B-C:Prog"J":J=E-Ans:△≠>C<.5B=>J=-J:X=N+Rec(I,J+F:Y=J+Q:Prog"J":J=F- Ans: ≠>Prog"K":C=B-C:Prog"J":J=Ans+E: △△X=X+Rec(D,J+90:Y+J5、KX=P+Rec(I,J+180+E:Y=J+O6、JC≤0=>0: C≤S=>90C 2÷πA: ≠>A △△△7、PE=F-Z:G=H+B:W=S 2÷24R: Z [1]=S-S 3÷40R 2-Rsin(180S÷2πR:M =180S÷2πR :Rec (T,F-180:N=I+X:Q=J+Y: Rec (T,E:P=I:+X:O =Y+J8、SJL ≤缓直点桩号=>B=曲线长度:F=计算方位角:H=直缓点桩号:T=切线长度:X=交点X 坐标:Y=交点Y 坐标: S=缓和曲线长度:R=曲线半径:Z=转角(左转输正,右转输负):≠>L≤下段直缓点桩号=>B=曲线长度:F=计算方位角:H=直缓点桩号:T=切线长度:X=交点X 坐标:Y=交点Y 坐标: S=缓和曲线长度:R=曲线半径:Z=转角值: ≠>L≤下段直缓点桩号……△△△ (注:有多少弯道就加多少个△)。
4800计算器常用测量计算程序

键即可。 FILE ,其余操作同①。
Prog
③ SHIFT
“DXJS”。
2.程序启动后,按照显示屏上的提示进行操作: ①“N=?” ,输入导线转折角总数。 如:图 1.1—1 中,N=5;图 1.1—2(a、b)中,N=6;图 1.1—3 中,N=5。 , ②“X1=?”“Y1=?” 对于图 1.1—1,图 1.1—2b、图 1.1—3 的图形,输入 A 点的已知坐标 XAYA。若 已知 AB 边的坐标方位角αBA 则输入:X1=αBA(以小数形式输入:度、分、秒) 1=0, ,Y
2.程序清单 程序清单
2.1 各主程序 2.2 各子程序
1 程序使用说明
1.1 导线计算程序
(程序名:DXJS)
一、程序功能
本程序可用于进行单一导线(包括附合导线、闭合导线、支导线)的简易平差计 算;同时还可计算以该导线点为测站点、定向点的极坐标点的坐标。
二、图形说明
本程序适合于以下图形的单一导线: 1.附合导线(图 1.1—1)
常 用 测 量 计 算 程 序
(适用于 CASIOfx—4800P 计算器)
南 昌 徕 特
有 限 公 司
测绘仪器经营维修部
地址:江西省南昌市北京东路 220 号 南昌大学南区对面 电话: (0791)8302887
南昌大学土木工程系
目
1.程序使用说明 程序使用说明
录
1.1 导线计算程序 1.2 公路任意中桩点、边桩点坐标或放样元素计算程序 1.3 方位角、边长反算程序 1.4 坐标交换计算程序 1.5 面积计算程序 1.6 交点坐标计算程序 1.7 点到直线的距离计算程序 1.8 高斯投影坐标正、反算及换带计算程序
桩点坐标或放样元素(方位角 A 或边长 S) 。然后,只要输入任意点的里程 LP,即可 计算出该点的中桩点,左、右边桩点的坐标或放样元素。 若为桥涵点,还应输入公路中线之法线与桥涵中线的交角 O0。交角 O 由公路中线之法 线起算,顺时针为正值,反时针为负值。 计算完每一点后,显示屏都会显示“GO ON?” ,若要继续计算,输入 1,否则输入 2, 当显示屏显示“MOVE STATION?”时,输入 1,为搬站,需重新输入搬站后测站 点、定向点坐标;输入 2,表示该段道路已算完,程序运行结束。
卡西欧4800坐标正反算通用程序(终极篇)
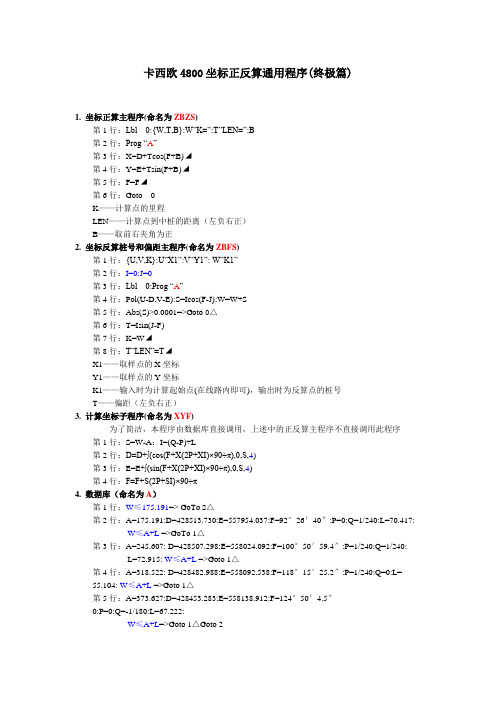
卡西欧4800坐标正反算通用程序(终极篇)1. 坐标正算主程序(命名为ZBZS)第1行:Lbl 0:{W,T,B}:W”K=”:T”LEN=”:B第2行:Prog “A”第3行:X=D+Tcos(F+B)◢第4行:Y=E+Tsin(F+B)◢第5行:F=F◢第6行:Goto 0K——计算点的里程LEN——计算点到中桩的距离(左负右正)B——取前右夹角为正2. 坐标反算桩号和偏距主程序(命名为ZBFS)第1行:{U,V,K}:U”X1”:V”Y1”: W”K1”第2行:I=0:J=0第3行:Lbl 0:Prog “A”第4行:Pol(U-D,V-E):S=Icos(F-J):W=W+S第5行:Abs(S)>0.0001=>Goto 0△第6行:T=Isin(J-F)第7行:K=W◢第8行:T”LEN”=T◢X1——取样点的X坐标Y1——取样点的Y坐标K1——输入时为计算起始点(在线路内即可),输出时为反算点的桩号T——偏距(左负右正)3. 计算坐标子程序(命名为XYF)为了简洁,本程序由数据库直接调用,上述中的正反算主程序不直接调用此程序第1行:S=W-A:I=(Q-P)÷L第2行:D=D+∫(cos(F+X(2P+XI)×90÷π),0,S,4)第3行:E=E+∫(sin(F+X(2P+XI)×90÷π),0,S,4)第4行:F=F+S(2P+SI)×90÷π4. 数据库(命名为A)第1行:W≤175.191=> GoTo 2△第2行:A=175.191:D=428513.730:E=557954.037:F=92°26′40″:P=0:Q=1/240:L=70.417: W≤A+L =>GoTo 1△第3行:A=245.607: D=428507.298:E=558024.092:F=100°50′59.4″:P=1/240:Q=1/240: L=72.915: W≤A+L =>Goto 1△第4行:A=318.522: D=428482.988:E=558092.538:F=118°15′25.2″:P=1/240:Q=0:L=55.104: W≤A+L =>Goto 1△第5行:A=373.627:D=428453.283:E=558138.912:F=124°50′4.5″0:P=0:Q=-1/180:L=67.222:W≤A+L=>Goto 1△Goto 2第6行:Lbl 1:Prog “XYF”: Goto 3第7行:Lbl 2:D=0:E=0:F=0第8行:Lbl 3A——曲线段起点的里程D——曲线段起点的x坐标E——曲线段起点的y坐标F——曲线段起点的坐标方位角P——曲线段起点的曲率(左负右正)Q——曲线段终点的曲率(左负右正)L——曲线段长度(尽量使用长度,为计算断链方便)说明:(1)正算主程序可以计算一般边桩的坐标,如要计算类似涵洞端墙的坐标需增加两个变量,具体方法参考本程序集中的第1篇辛普生公式的坐标计算通用程序(2)程序规定,左偏曲线曲率(半径倒数)输入负值,右偏曲线曲率输入正值,直线上点曲率输入0。
“第2章 水准测量”CASIOfx-4800P计算程序
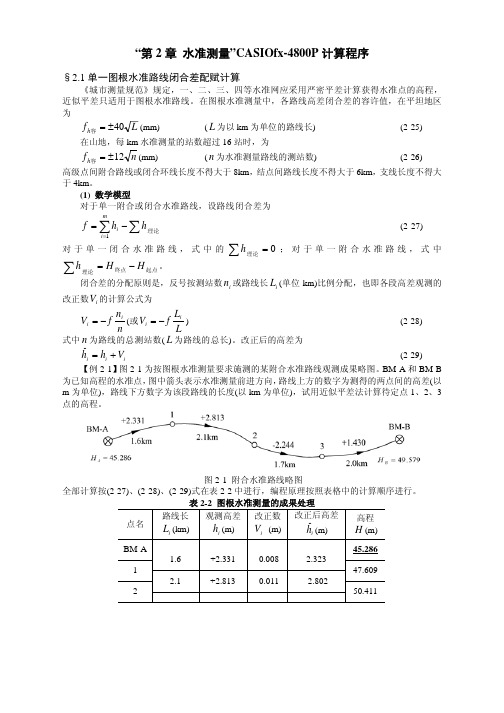
“第2章 水准测量”CASIOfx-4800P 计算程序§2.1单一图根水准路线闭合差配赋计算《城市测量规范》规定,一、二、三、四等水准网应采用严密平差计算获得水准点的高程,近似平差只适用于图根水准路线。
在图根水准测量中,各路线高差闭合差的容许值,在平坦地区为L f h 40±=容(mm) (L 为以km 为单位的路线长) (2-25)在山地,每km 水准测量的站数超过16站时,为n f h 12±=容(mm) (n 为水准测量路线的测站数) (2-26)高级点间附合路线或闭合环线长度不得大于8km ,结点间路线长度不得大于6km ,支线长度不得大于4km 。
(1) 数学模型对于单一附合或闭合水准路线,设路线闭合差为∑∑=−=mi i h h f 1理论(2-27)对于单一闭合水准路线,式中的0=∑理论h;对于单一附合水准路线,式中起点终点理论H H h−=∑。
闭合差的分配原则是,反号按测站数i n 或路线长i L (单位km)比例分配,也即各段高差观测的改正数i V 的计算公式为n n fV i i −=(或LL f V i i −=) (2-28)式中n 为路线的总测站数(L 为路线的总长)。
改正后的高差为iiiV h h +=ˆ(2-29)【例2-1】图2-1为按图根水准测量要求施测的某附合水准路线观测成果略图。
BM-A 和BM-B 为已知高程的水准点,图中箭头表示水准测量前进方向,路线上方的数字为测得的两点间的高差(以m 为单位),路线下方数字为该段路线的长度(以km 为单位),试用近似平差法计算待定点1、2、3点的高程。
全部计算按(2-27)、(2-28)、(2-29)式在表2-2中进行,编程原理按照表格中的计算顺序进行。
表2-2 图根水准测量的成果处理点名 路线长 i L (km) 观测高差i h (m) 改正数i V (m)改正后高差ih ˆ(m) 高程H (m)BM-A45.2861.6 +2.331 -0.008 2.3231 47.6092.1 +2.813 -0.011 -2.8022 50.411图2-1 附合水准路线略图1.73 48.159BM-B 2.0 +1.430 -0.010 +1.42049.579∑7.4 +4.330 -0.037 +4.293(2)、程序与案例1) 变量对照表数学模型变量fx-4800P 变量单位 注释A HAm起始点高程B H Bm 终止点高程 i N测段计数 i hC ,Z[2N] m 观测高差 i L 或i nK ,Z[2N-1] km 或站数测段路线长或测站数fF m 路线闭合差G m 待求点高程 P P=1代表平坦,其余数代表山地 D 未知水准点的数量2) 程序程序名:SZJSP: D: A: B: Defm 8D=D+1:N=0: F=0: M=0 Lbl 0 N=N+1 {CK}Z[2N-1]=C: F=F+C Z[2N]=K: M=M+K N D Goto 0P=1W=0.04M:W=0.012M F=F+A-BAbs F W F=-F ÷M:Goto E N=0: G=A Lbl 1N=N+1G=G+Z[2N-1]+FZ[2N] N D Goto 1 G-BLbl E3) 操作步骤将上述程序以SZJS 的文件名输入计算器后,按键 5 2及选择程序SZJS ,按键,屏幕提示及操作步骤如下:步骤 显示 按键 注释1 P? ××× 1 输入水准路线类型2 D? ×××3 输入未知高程点数量3 A ?×××45.286路线起点高程4 B ?××× 49.579路线终点高程5 C ?××× 2.331 测段高差6 K? ××× 1.6 测段路线长或测站数7 C ?2.331 2.8138 K? 1.6 2.19 C ?2.813 -2.24410 K? 2.1 1.711 C ?-2.244 1.43012 K? 1.7 2.013 F=0.037路线闭合差 14 N=1点号 15 G=47.609高程 16 N=2点号 17 G=50.4115 高程 18 N=3点号 19 G=48.159高程 20 N=4点号 21 N=49.579高程22 G-B=0检核计算结果提示:1、程序中命令Defm 8是按3个未知水准点设置,计算时要根据实际的未知水准点个数进行修改。
史上最全的casio-4800工程测量程序(测量放样、坐标放点、导线放样[1]...)
![史上最全的casio-4800工程测量程序(测量放样、坐标放点、导线放样[1]...)](https://img.taocdn.com/s3/m/c4d4bdfb04a1b0717fd5dd3b.png)
1 XY边长及方位角反算Prog"A":L=J:Prog"B"◢Fix 3:I"D="◢Lbl 1:{S}:V"X"=X+Rec(S, L ◢U"Y"=Y+J ◢Goto 1输入:X1,Y1,X2,Y2.输出: L°=,D=.2 XY-1输入里程桩号计算中间点坐标Prog"A":L=J:Prog"B"◢Fix 3:I"D="◢{Z}: Z:Lbl 1:{G}:V"X"=X+Rec(Abs(G-Z, L ◢U"Y"=Y+J ◢Z-起始点里程桩号Goto 1G-任一点里程桩号3 JD两直线交点坐标计算Prog"A":Prog"C":L"L1":Prog"F":E=W+K:{L}:L"L2":Prog"F":C=V+K:S=tan E:T=tan C:G=S-T:A=A+0.0001U"X"=(SA-MT-B+N)/G◢Z"Y"=S(U-A)+B◢Pol(U-M,Z-N:I"D="输入X1,Y1,X2,Y2,X3,Y3.X4,Y4,L1,L2,输出X=,Y=,D=,4 ZBFD坐标放点Prog"A":Lbl 3:Fix 3:{MN}:Pol(M"X3"-A,N"Y3"-B:I"D="◢J=J-W+180:J<0=>J=J+360L=J:Prog"B"◢Goto 3输入:X1,Y1,X2,Y2,X3,Y3.输出:D,L°5 Z自由导线推算E=0:1F=0:Prog"A":Fixm:C=A:D=B:J[F]=J:Lbl 4:{LH}:L"L0":Prog"F":I[F]=J[F]+K-180:H[E+F]=H"D":Prog"R":C"X="◢D"Y="◢J[F]=I[F]:Goto 46 ZDX支导线计算X1Y1,X2Y2,为已知点坐标Prog"A":L°-角度用小数输入Lbl 4:输一组L°、D.得一个点的坐标{LS}:L:Prog"F":M"X3"=A+Rec(S,W+K+180◢N"Y3"=B+J◢Goto 4输入:X1,Y1,X2,Y2,L,S.输出:X3,Y3.L°—观测角度以下按小数点输入7 DX单一导线简易平差计算Prog"A":Prog"C":J=W:I=V:C=A-M:D=B-N:F=E"N":I[F]=J:Lbl 1:F=F-1:{GH}:I[F]=J[F]+G"L°"-180:I[F]<0=>I[F]=I[F]+360:≠>I[F]>360=>I[F]=I[F]-360H[E+F]=H"D":F>1=>Goto 1{G}:G=I[F]+G"L°"-180:G<0=>G=G+360:≠>G>360=>G=G-360I=G-I:W=12″[S]=620.790G"W"=602FracI ◢相对中误差:fS/[S]=1/88119fX=-0.007fY=0.000G=0:Lbl 2:I[F]=I[F]-I(E-F)/E:Prog"R":说明:F=F+1:N-观测角数,L°-左角按度分秒输入G=H+G:W-角度闭合差,fX,fY 坐标闭合差F<E=>Goto 2若用外(右)角计算闭合差程序中之I=G-I-360G"[S]="◢若用内(左)角计算闭合差程序中之I=G-II"fX"=C ◢本程序只能计算八个未知点,多于八个时每增加一个C=A:未知点,必需扩展两个储存器.A"fY"=D ◢D=B:B"fS/[S]"=Int(G/ √ (I I+AA ◢Lbl 3: F=F -1:Prog"R":C"X"=C-I H/G ◢D"Y"=D-AH/G ◢F>1=>Goto 38 WDX 无定向导线Prog"A":D=I:C=0:M=0:N=0:P:Lbl 0:P=P-1:{LS}:L"B°":Prog"F":F=K:C=C+F:C=0=>Goto 1C=C+180:Goto 1X1Y1,X2Y2,-已知点坐标Lbl 1:P-边数,B°-观测角,第一个角输入0,Rec(S,C:S-边长,Xf,Yf-增量累加数,记录侍用Fix 4:输入一组Xf,Yf,求得一组X Y,M"Xf"=M+I ◢用左角,度以下按小数输入.N"Yf"=N+J ◢P>0=>Goto 0Pol(-M,-N:R=W+180-J:K=D/I:V=Cos R:点号观测角边长Xf Yf X Y E=Sin R:Lbl 2:{HO}:H"Xf":O"Yf":Fix 3:T"X"=X+K(HV-OE ◢Z"Y"=Y+K(HE+OV ◢Goto 2B 为观测角,第一个角输入04119.5814110.7005102.2204969.5125029.9914887.630142.64164.8800-66.203843.11280.0000-211.5145-303.145023 0°00′00″ 42 28 06 277 33 42 A 1164.88313.274329.1104426.9529 QJD前交点(正弦公式)Prog"A":Prog"J":S=I Sin E/Sin(E+K:Prog"O"A°、B°-观测角,X1、Y1、X2、Y2-正切公式Prog"A":Prog"J":S=tan E:T=tan K:G=S -1+T -1:M"X3"=(X/T+A/S-Y+B)/G ◢N"Y3"=(Y/T+B/S+X-A)/G 输入:X1,Y1.X2,Y2,A°,B°,输出:X3Y310 FX 方向交会Prog"A":Prog"J":S=tan E:T=tan K:G=S-T:M"X3"=(SX-AT-Y+B)/G ◢N"Y3"=S(M-X)+YX1Y1,X2Y2,为起算点坐标.A°,B°-方位角.X,Y--交点坐标11 CJ 侧方交会点Prog"A":Prog"J":S=I sin(E+K)/Sin K:{K}:K=0=>M"X"=A+Rec(S,W+E-180◢≠N"Y"=B+JX1Y1,X1'Y1',X2Y2--已知点坐标,A°B°-观测角,左右分开.左K=0,右K=1A=63° 33′06″B=92° 20′51″从左右两组算出坐标取中数为XYA ′=109° 59′39″B ′=50° 57′06″12 HJ后交点计算Prog"A":M"X3":X1=992.692X2=1012.499N"Y3":Prog"J":S=tan E:T=tan K:H=(Y-B)/S+X-A:F=(X-A)/S-Y+B:Q=(N-B)/T-M+A:V=(M-A)/T+N-B:K=(H+Q)/(F+V:X3=1063.248D=(H-FK)/(1+K2:Y4=999.997Y3=1000.000O"X4"=A+D◢X1Y1,X2Y2,X3Y3---已知点坐标P"Y4"=B+KD A°、B°----观测角X4Y4--测点坐标12HJ—1Prog〝A〞︰D=I︰(另一种后Pol(A-M〝X3〞,B-N〝Y3〞︰交公式)S=I︰G=J︰Prog〝J〞︰Z=180-(W-G+E+K)÷2︰Q=tan-1(D Sin C÷S Sin E︰H=tan-1(tan Z÷tan(45+Q︰R=Z+H︰T=D Sin(E+R)÷Sin E︰O〝X〞=X+T Cos(W+R◢P〝Y〞=Y+T Sin(J+R13 LDHJ两点后交Prog"A": L"A°":Prog"F":C=K:{L}:X2=857.025X1=944.202L"B°":Prog"F":O=K:{L}:L"E°":Prog"F":E=K:{L}:L"F°":Prog"F":F=K:Y3=139.053N=Sin O/Sin(O+F:P=√(S2+M2-2SM Cos(C-O:观测角A°B°E°F°度以下按小数点输入.T=√(D2+N2-2DN Cos(F-E:K"D1"=2I"D0"/(P+T◢S"S1"=KS◢D"S2"=KD◢M"S3"=KM◢N"S4"=KN◢H=Cos-1((I2+S2-M2)/2IS:L=H:Prog"B":Z"H°="◢G=Cos-1((I2+N2-D2)/2IN:L=G:Prog"B":Z"G°="◢Fix 3:Q"X3"=A+Rec(S,W+H+180◢R"Y3"=B+J◢Q"X4"=A+Rec(D,W+E-F-L◢R"Y4"=B+JProg"A":Lbl 0:Prog"W":Fix 2:S=D(Sin K)2◢H=S/tan K+G◢{L}:Prog"F":输入:X1,Y1,X2,Y2,H0-起点高,T仪高,Prog"O"◢D-视距,S-平距,Z°—天顶距,P标高Goto 0输出:X3,Y3,S平距15 JZB极坐标法测碎部点坐标、高程Prog"A":G=E"H0"+T:Lbl 8:{LSV}:Prog"F":Prog"O"◢H=G+V"h"-P◢Goto 8输入:X1,Y1,X2,Y2, H0,T,L°,S,h求:X,Y,H.X3=273.29916 SD 垂距,垂点坐标计算Y3=208.502Prog"A":O=Sin J:P=CosJ:E=M"X3"-X:F=N"Y3"-Y:S=EP+FO ◢D=EO-FP ◢Y=252.157V"X"=X+Rec(S,W ◢U"Y"=Y+J注:D 为正时,3点在1-2之左侧;S 为正,3在1-2之线上;为负则在2--117 MM 坐标法计算多边形面积N: P=0: V=0:A"X":B"Y":E=A: F=B:Fix 3:Lbl 0:{XY}:X: Y:N=4(边数)Lbl 1:Pol(X-A,Y-B: I"S"◢P=P+(Y-B)(X+A)/2:A=X:B=Y:V=V+1:V ≠N=>Goto 0P"m 2"=Abs P ◢Q"mu"=1.5 m P18断面图封闭图形面积计算(高程相当于X,距离相当于Y,用相对坐标计算,)N:P=0:V=0:Y=0:A"H":B"D":E=A:69.8F=B: Fix 3:Lbl 0:N=V+1=>H=E: Y=F: Goto 1{HD }:H:Y=Y+D:Lbl 1:m =32.795A=H:B=Y:N=多边形边数,V=V+1:H=转折点高程V ≠N=> Goto 0D=相邻两点距离P"m 2"=Abs P第一点D 输入0。
卡西欧4800坐标计算程序

QL(坐标反算)Lbi 0:C“X0”:D“Y0”:{XY}:X“X2”Y“Y2”:(X-C)=O=>Goto 1:≠Lbi 1:W“Q”=0◢Goto 0Lbi 2:Prog“FWJ”Fix 4W“Q”=IntW+0.01Int(60FracW)+0.006Frac(60FracW) ◢NormT“L”= ((X-C)2+(Y-D)2)◢Goto 0说明:(已知两点坐标,反算方位角及两点间的距离)先按FILE键,光标选择QL,按EXE运行。
输入:X0? 测站点(或起算点)X轴坐标,按EXEY0? 测站点(或起算点)Y轴坐标,按EXEX2? 后视点(或方向点)X轴坐标,按EXEY2? 后视点(或方向点)Y轴坐标,按EXE显示: Q 方位角(如:125.0325即表示125。
03’25”),按EXE L 两点间距离再按EXE进行循环运算,重复输入X2?、Y2?否则按AC键退出。
XY(坐标正算)Lbi 0:C“X0”:D“Y0”:{WM}:W“Q”M“L”:X=C+McosW◢Y=D+MsinW◢Goto 0说明:(已知一点坐标、方位角、距离,求另一点坐标)先按FILE键,光标选择XY,按EXE运行。
输入:X0? 测站点(或起算点)X轴坐标,按EXE Y0? 测站点(或起算点)Y轴坐标,按EXE Q? 已知方位角,按EXEL? 两点间距离,按EXE显示:X 所求点X轴坐标,按EXEY 所求点Y轴坐标,按EXE再按EXE进行循环运算,重复输入Q? 、L?否则按AC键退出。
ZX(直线坐标计算)Lbi 0:G“QD”:A“QDX”: B“QDY”:Q“Q”:{L,K}:Prog“ZZ”:Goto 0说明:(计算直线段任意里程桩号坐标)先按FILE键,光标选择XY,按EXE运行。
输入:QD? 直线段起点里程,按EXEQDX? 起点X轴坐标,按EXEQDY? 起点Y轴坐标,按EXEQ? 已知方位角,按EXEL? 所求点里程,按EXEK? 所求点距中线的宽度(左负右正),按EXE显示:X 所求点X轴坐标,按EXEY 所求点Y轴坐标,再按EXE进行循环运算,重复输入L? 、K?否则按AC键退出。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CASIO fx-4500PA计算中桩、边桩坐标程序
O→X N Y N
●L1
X“ZX”Y“ZY”ZKA “ZH”B “XZH”S“YZH”O“EJ”:R“R (L-,R+)”=θ→Goto E⊿I “LS”L:Lbl E:Q=θ:J“HX”U“HY”:Goto 6:Lblθ
●L2
G:“→E”◢Lbl 1:{N}:N“→L”:W=Abs(A-AbsN:N=θ→Gotoθ⊿E=O:F=θ:P=θ:R≠θ→Q=90/πR:Goto2⊿Rec(W,18θ+O:Goto4⊿Lbl 2
●L3
I≤W→E=Q(W-I:Goto 3⊿P=QW2/I:Rec(W-Wx y5/9θR2I2,P/3+O:Goto4⊿Lbl 3
●L4
W>L-I→Goto 1⊿F=2RsinE:P=E+O+IQ:FcosP+Rec(I-Ix y3/9θR2,IQ/3+O:Lbl 4
●L5
Q=B+Ans:J=Q:F=S+W+FsinP:U=Ans:N>θ→Goto 6⊿Lbl 5 ●L6
{D}:D=θ→Goto 1⊿D=1→Goto 8⊿H=P+E-9θAbsD/D:J=Q+Rec (Abs D,P+E-9θAbsD/D:U=F+W Lbl 6
●L7
Pol(J-X,U-Y:W<θ→W+36θ:≠→W⊿Q=θ→G=Ans:Goto θ⊿“E=”◢V:“S=”◢Lbl 7
●L8
{CMTH}:M=θ→Goto 5⊿M=1→Goto 8⊿C Abs sinM:“→D=”◢V-Ans:“⊿S=”◢Z=θ→Goto 7⊿T=θ→Goto 7⊿K-T+H+Z+CcosM:“→H”◢Goto 5⊿Lb1 8
●L9
J:“XD=”◢U:“YD=”◢Goto 1 计算:
ZX?输入置镜点X坐标ZY?输入置镜点Y坐标
Z?输入置镜点高程
K?输入仪器高度
ZH?输入直缓点里程XZH?输入直缓点X坐标YZH?输入直缓点Y坐标EJ?输入直缓点方位角
R(L-,R +)?输入圆曲线半径,左偏为负,右偏为正
LS?输入直缓点至缓圆点长度
L?输入完整曲线长度,即两倍LS加圆曲线长
HX?输入后视点X坐标HY?输入后视点Y坐标
→E 显示后视方位角
→L?输入计算里程
E=显示视方位角
S=显示前视距离
M?输入1进入①中桩计算模式,输入θ进入②边桩计算模式,输入竖直角度进入③测距仪计算模式
①中桩计算模式:
XD=显示计算里程中桩X坐标YD=显示计算里程中桩Y坐标→L?输入下一计算里程
②边桩计算模式
D?输入边桩距离,左侧输正值,右侧输负值
E=显示前视方位角
S=显示前视距离
M?输入1显示边桩坐标
→L?输入下一计算里程
③测距仪计算模式
C?输入斜距
→D=显示平距
⊿S=显示距离仪器?m
说明:“θ”为零,O为英文字母
直线、圆曲线中心及左、右边桩计算程序fx-4800p
C“Xθ=”:D“Yθ=”:E“Wθ=”:N=Ans:R“R=”:L“Lμo=”:K“D=”:M“Jμo=”:Q=9θL÷(πR):S=2RsinQ :O =C+Scos(N-Q)◢P=D+Ssin(N-Q)◢
W=E-2Q◢
X=O+Kcos(N-2Q-M)◢
Y=P+Ksin(N-2Q-M)◢
注:
Xθ=起算点坐标
Yθ=起算点坐标
Wθ=起算点方位角
R=曲线半径,线路前进方向,左+,右-
直线R为无穷大
Lμo=置镜点到待求点距离
D左、右边距离
Jμo=前进方向左(+90),右(-90)
O=中桩坐标
P=中桩坐标
W=待求点方位角
X=左、右边桩坐标
Y=左、右边桩坐标
缓和曲线中心及左、右边桩计算程序fx-4800p
C“Xθ=”:D“Yθ=”:E“Wθ=”:N=Ans:R“R=”:F“Lθ=”:L“Lμo=”:K“D=”:M“Jμo=”←
U=L-L^5÷(40R2F2):V=L^3÷(6RF)-L^7÷(336R^3F^3):Q=tan-1
(V÷U):S=√(U2+V2)←
B=9θL2÷(πRF):O=C+Scos(N-Q)◢
P=D+Ssin(N-Q)◢
W=E-B◢
X=O+Kcos(N-B-M)◢
Y=P+Ksin(N-B-M)◢
注:
Xθ=起算点坐标
Yθ=起算点坐标
Wθ=起算点方位角
R=曲线半径,线路前进方向,左+,右-
Lθ=缓和曲线长
Lμo=置镜点到待求点距离
D左、右待求距离
Jμo=前进方向左(+90),右(-90)
O=中桩坐标
P=中桩坐标
W=待求点方位角
X=左、右边桩坐标
Y=左、右边桩坐标
放样程序fx-4800p
RL
I“XZ”:W:“YZ”:G“XH”:H“YH”←
B=H-W ←
C=G-I ←
Prog“P”:U=A←
K=√(B2+C2)←
C=X“X-”-I←
B=Y“Y-”-W←
Prog“P”←
L“L”=√(B2+C2)◢
V=A-U:V<θ==>V=V+36θ⊿V “V=”◢
P
A=tan-1(B÷C)←
B≥θ==>C≥θ==>A=A:≠=>C<θ==>A=A+18θ⊿⊿≠=>B<θ==> C≥θ==>A=A+36θ: ≠=>C<θ==>A= A+18θ⊿⊿⊿←
XZ、YZ—置镜点X、Y坐标;XH、YH—后视点坐标;
X-、Y-—前视点坐标;
输出:R=水平角、L=置镜点至前视点水平距离。
XY(转点坐标)计算程序fx-4800p
ABCD:{RL}←
I=1:J=1:Pol((C-A),(D-B)):F=R+J←
Rec(L,F)←
X“X”=I+A◢
Y“Y”=J+B◢
注:
A、B—置镜点坐标;
C、D—后视点坐标;
R—水平角;
L—转点至置镜点水平距离。
SPJ(水平角)计算程序fx-4800p
ABCDXY←
I=1:J=1:Pol((C-A),(D-B)):F=J←
Pol((X-A),(Y-B)):R=J-F←
R>36θ==>R=R-36θ:≠=>R<θ==>R=R+36θ⊿R“R=”◢I“L=”◢
注:
A、B—置镜点坐标;
C、D—后视点坐标;
X、Y—前视点坐标;
输出R—水平角,L—置镜点至前视点水平距离。
方位角计算程序fx-4800p
X“X1”:Y “Y1”:A“XZ”:B“YZ”:Fixm:Pol(X-A,Y-B):I“L=”◢
J<θ==> J=J+36θ⊿J“J0=”
注:
X1、Y1—前视(后视)点坐标;
XZ、YZ—置镜点坐标;
L—置镜点至前视(后视)点距离;
J0—方位角。
直、圆、缓线计算程序fx-4800p 复化辛普森公式
A“QDLC”B“ZDLC”R“QDR”V“ZDR”C“XA”D“YA”E “ALFA”:Lb1θ:{L}:L“Li”:T=(1÷V-1÷R)÷(B-A):H=(L-A)÷N:P=TNH+1÷R:S=9θH÷π:W=E+(P+1÷R)NS◢
G=1:X“Xi”=C+H÷6×(cosE+cosW+4×∑(cos(E+((G+0.5)HT+2÷R)(G+0.5)S),G,θ,(N-1))+2∑(cos (E+(THG+2÷R)GS),G,1,(N-1)))◢
Y“Yi”=D+H÷6×(sinE+sinW+4×∑(sin(E+((G+0.5)HT+2÷R)(G+0.5)S,G,θ,(N-1))+2×∑(sin(E+(THG+2÷R)GS,G,1,(N-1)))◢{IF}:I“ZBJ”:F“YBJ”:Z“XZ”=X+Icos(W-90o)◢
J“YZ”=Y+Isin(W-90o)◢Z“XY”=X+Fcos(W+90o)◢J“YY”=Y+Fsin(W+90o)◢Gotoθ⊿
注:QDLC—起点里程;
ZDLC—终点里程;
QDR、ZDR—起、终点半径
(左负右正)XA、YA—起点坐标;
ALFA—起点方位角;
Li—待求点里程;
N—2;
W—所求点切线方位角;
Xi、Yi—待求点中坐标
ZBJ—左边桩距离;
YBJ—右边桩距离;
XZ、YZ—左边桩坐标;
XY、YY—右边桩坐标。