嵌入式交叉编译环境的搭建
bcctools 交叉编译

bcctools 交叉编译bcctools是一个开源的工具集,用于交叉编译。
交叉编译是指在一台主机上编译生成目标平台上可执行的程序。
在嵌入式系统开发中,交叉编译非常常见,因为嵌入式设备的处理能力较弱,无法直接进行编译操作。
本文将介绍bcctools的基本概念、使用方法以及相关注意事项。
一、bcctools简介bcctools是一套基于GCC的交叉编译工具链,支持多种目标平台,包括ARM、MIPS、PowerPC等。
它是GCC的一个分支,专门用于嵌入式系统的交叉编译。
bcctools提供了一系列工具,包括编译器、连接器、汇编器等,可以将源代码编译成目标平台上可执行的程序。
二、bcctools的安装1. 下载bcctools源代码包,并解压到指定目录。
2. 进入bcctools源代码目录,执行configure命令进行配置。
3. 执行make命令进行编译。
4. 执行make install命令安装bcctools到指定目录。
三、使用bcctools进行交叉编译1. 创建一个工作目录,并进入该目录。
2. 编写源代码文件,例如hello.c。
3. 执行以下命令进行交叉编译:```bcc -target <target> -o hello hello.c```其中,<target>为目标平台的架构,例如arm、mips等。
4. 执行以下命令将编译生成的可执行文件拷贝到目标平台:```scp hello <username>@<ip>:<path>```其中,<username>为登录目标平台的用户名,<ip>为目标平台的IP地址,<path>为目标路径。
四、注意事项1. 在交叉编译时,需要确保目标平台的交叉编译工具链已经安装并配置正确。
2. 在编写源代码时,应注意与目标平台相关的特性和限制,避免使用不支持的语法或库函数。
libnl mips 交叉编译

序号一:概述近年来,随着计算机技术的不断发展,嵌入式系统的应用范围越来越广泛。
作为嵌入式系统中的重要组成部分,网络协议栈的开发和优化也显得尤为重要。
而在嵌入式系统中,交叉编译是十分常见的操作,它可以使开发者在不同架构的硬件评台上进行程序的编译和调试。
本文将围绕libnl和mips架构进行交叉编译的过程和方法进行探讨,以帮助开发者更好地掌握交叉编译技术。
序号二:libnl简介libnl(The Netlink Library)是一个用于操作Linux内核内网口的库。
它提供了一组API,允许开发者通过Netlink协议与内核进行通信。
由于其功能强大、易用性好的特点,libnl在各种嵌入式系统开发中被广泛应用。
在进行嵌入式系统的网络协议栈开发时,往往需要将libnl库进行交叉编译,以适配不同架构的硬件评台。
序号三:mips架构介绍MIPS架构是一种常见的嵌入式处理器架构,广泛应用于路由器、智能手机、数字电视等嵌入式设备中。
在进行嵌入式系统开发时,经常会遇到需要在MIPS架构上进行交叉编译的情况。
掌握在MIPS架构上进行交叉编译的方法和技巧对于嵌入式系统开发者来说至关重要。
序号四:libnl在MIPS架构上的交叉编译在进行libnl在MIPS架构上的交叉编译时,需要使用特定的交叉编译工具链。
在Linux系统上,可以使用buildroot或OpenWrt等工具构建MIPS架构的交叉编译环境。
在搭建好交叉编译环境后,可以通过以下步骤进行libnl的交叉编译:1. 下载libnl源码包首先从libnl的冠方全球信息站上下载最新的源码包,并解压到本地目录。
2. 配置交叉编译环境设置交叉编译工具链的环境变量,如CC、AR、LD等,以便在编译过程中使用交叉编译工具。
3. 配置libnl源码进入libnl源码目录,执行./configure --host=mips命令,告知configure脚本需要在MIPS架构上进行编译。
slabinfo.c 交叉编译

slabinfo.c 交叉编译交叉编译是一种在一种类型的硬件平台上编译并生成特定于另一种硬件平台的代码的过程。
它常常在开发过程中使用,特别是嵌入式系统开发。
在这个过程中,我们将讨论如何使用gcc进行交叉编译,并以slabinfo.c为例。
一、交叉编译的基础交叉编译涉及到了几个关键的概念,包括目标平台(目标机)和源平台(源机)。
在slabinfo.c的例子中,源平台通常是你的个人计算机,而目标平台可能是嵌入式设备或其他类型的硬件设备。
二、安装交叉编译工具链为了进行交叉编译,你需要安装一个适用于目标平台的编译器。
对于许多嵌入式系统,GNU工具链是最常用的。
你可以从官方网站下载并安装。
三、创建交叉编译环境一旦你安装了交叉编译工具链,你需要在源平台上创建一个特定的环境,以配置编译器和链接器以便于交叉编译。
这通常涉及到设置正确的库路径、包含路径等。
四、编译slabinfo.c在你的交叉编译环境中,你可以使用以下命令来编译slabinfo.c:`gcc -o slabinfo_cross_compile slabinfo.c -march=arm -mfpu=vfp -mfloat-abi=hard`这个命令告诉gcc编译器:* 生成一个名为"slabinfo_cross_compile"的可执行文件;* 使用特定的架构(在这种情况下是arm);* 使用VFP浮点单元;* 使用硬浮点 ABI。
五、运行交叉编译的slabinfo程序现在你可以运行交叉编译的slabinfo程序了:`./slabinfo_cross_compile`你应该能在目标平台上看到与源平台上的slabinfo相同的输出。
六、注意事项交叉编译可能会涉及一些复杂的配置过程,具体取决于你的目标平台和硬件。
以下是一些常见注意事项:* 确保你了解目标平台的架构和硬件特性,以便正确配置编译器和链接器。
* 确保你的库路径和包含路径设置正确,以便编译器可以找到必要的库和头文件。
建立交叉编译工具链

建立交叉编译工具链
工欲善其事,必先利其器。嵌入式Linux开发不能缺少 的就是开发工具,其中最基本的是编译工具。和传统的编译 方式不同,嵌入式系统开发需要在不同的计算机上编译出开 发板需要的程序,所用的编译工具也与传统的编译工具不同 。本章讲解如何构建嵌入式Linux开发需要的交叉编译工具 链,主要内容如下: 交叉编译工具链介绍 手工构建交叉编译工具链 使用脚本构建交叉编译工具链 交叉编译工具链常见的问题
18.1
什么是交叉编译
交叉编译是伴随嵌入式系统的发展而来的,传统的程 序编译方式,生成的程序直接在本地运行,这种编译方式称 作本地编译(Native Compilation);嵌入式系统多采用交 叉编译的方式,在本机编译好的程序是不能在本机运行的, 需要通过特定的手段(例如烧写,下载等)安装到目标系统 上执行。这种编译运行的方法比较繁琐,是受到实际条件限 制的。大多数的嵌入式系统目标板系统资源都很有限,无论 是存储空间还是CPU处理能力,都很难达到编译程序的要求 。而且很多目标板是没有操作系统的,需要通过其他的机器 编译操作系统和应用程序。
18.3.6
编译安装glibc库
GNU glibc库是Linux系统程序非常重要的组成部分。 如果用户开发目标平台的应用程序,则必须编译安装glibc库 。glibc-2.3.2版本推荐先安装以下的工具: GNU make 3.79或更新的版本; GCC 3.2或更新的版本; GNU binutils 2.13或更新的版本。
18.3.3
建立linux内核头文件
交叉编译器需要通过内核头文件获取目标平台支持的系 统函数调用的信息。因此,需要拷贝内核的头文件。但是,直 接拷贝内核头文件是不行的,还需要对内核做简单的配置,让 内核脚本生成目标平台的头文件。需要注意的是,Linux内核 版本和编译器版本依赖比较强,一个版本的编译器不能保证编 译所有内核版本。 (1)首先在$PRJROOT/kernel目录下解压缩内核源代码 (2)接下来进入内核代码目录配置目标平台的头文件: (3)Linux内核配置的顶层界面,按照功能划分分成若 干项,与生成目标平台头文件相关的是System Type项。使用 光标键移动到该选项,回车进入配置界面。 (4)目标平台选择完毕后,直接回车,回到了系统类型 配置界面。 (5)配置内核结束后,检查是否生成正确的内核头文件 include/linux/version.h和include/linux/autoconf.h,这两个文件 是编译glibc需要的。以在多种平台上进行,本书建 议使用x86体系结构的PC机,在Linux系统下进行。这种选 择不是强制的,是因为x86体系结构是使用最广泛的。同时 ,使用Linux系统可以避免许多开发环境的设置。建立交叉 编译工具链需要以下的准备: 磁盘空间: 源代码: 命令行: 其他工具:
ubuntu下搭建MIPS交叉编译环境
ubuntu下搭建MIPS交叉编译环境 由于要在本地编译程序,在嵌⼊式系统上运⾏,因此需要在本地装编译器,⽬前主要需要mipsel-linux-gcc。
之前⼀直以为可以⽤apt-get install找到,结果找了好久找不到,发现还是得⾃⼰编。
主要是参考上⾯的那个链接,然后这对⾃⼰需求改了改配置。
1. 环境系统:Ubuntu 16.04软件: buildroot该软件可以编译⽤于 mips, arm等等的C编译器。
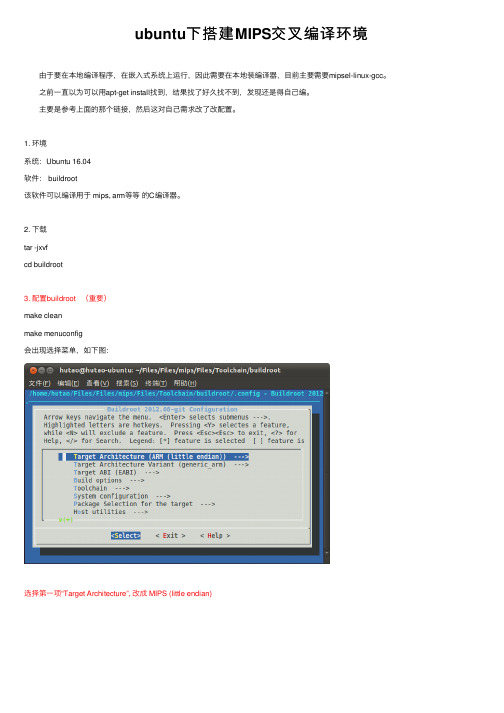
2. 下载tar -jxvfcd buildroot3. 配置buildroot (重要)make cleanmake menuconfig会出现选择菜单,如下图:选择第⼀项“Target Architecture”, 改成 MIPS (little endian)另外,选择“Toolchain”, 将"kernel headers"改成⾃⼰主机上的Linux版本(及运⾏改编译器的主机)可以在主机上通过 uname -r 或者 cat /proc/version查看。
原⽣的是只有gcc部分,没有g++部分,需要对编译C++程序,则在菜单⾥选择 Enable c++选项(按 y 选取)。
⽤于编译python的配置选项我主要⽤这个来编译python放在嵌⼊式设备系统上⽤,最开始就按照上⾯的选项,编译⼀般的程序没问题,编译python会出现:unknow type name 'wchar_t' 错误,这个需要在这⾥的⼯具⾥选⼏个选项;a1. 在配置⾥选择对wchar的⽀持;a2. 退出Target options,进⼊Target packages,在Target packages⾥再添加⼏个选项(这⾥我没看不配置这个会出什么问题,这个⾥⾯到底做什么的,我直接按照进⼊Interpreter lanaguages and scripting 选项,选择python选项,然后吧core python modules⾥的都选了吧~(编译⼀次太费时了,缺个什么⼜得重新编译这个⼯具链)配置完了后,保存,并退出。
cmake mips 交叉编译

cmake mips 交叉编译CMake是一个跨平台的构建工具,可以用于自动化构建和管理各种软件项目。
MIPS是一种基于RISC架构的微处理器,常用于嵌入式系统和嵌入式开发。
交叉编译是指在一种平台上开发和构建软件,然后在另一种不同的平台上运行。
在本文中,我们将探讨如何使用CMake进行MIPS架构的交叉编译。
我们需要准备好交叉编译所需的工具链。
工具链是一组用于将源代码编译成可执行文件的工具和库的集合。
对于MIPS架构的交叉编译,我们需要下载并安装MIPS交叉编译工具链。
可以从MIPS官方网站或第三方提供的镜像站点下载相应的工具链。
安装完交叉编译工具链后,我们需要配置CMake来使用该工具链进行交叉编译。
在项目的根目录下创建一个CMakeLists.txt文件,该文件是CMake的配置文件。
在该文件中,我们可以指定项目的源代码文件、编译选项和目标平台等信息。
下面是一个示例的CMakeLists.txt文件:```cmake_minimum_required(VERSION 3.10)project(MyProject)# 设置交叉编译工具链的路径set(CMAKE_C_COMPILER "path/to/mips-gcc")set(CMAKE_CXX_COMPILER "path/to/mips-g++")# 设置交叉编译的目标平台set(CMAKE_SYSTEM_NAME "Generic")set(CMAKE_SYSTEM_PROCESSOR "mips")# 添加源代码文件add_executable(myapp main.c)# 指定编译选项target_compile_options(myapp PRIVATE -Wall -Wextra)# 指定链接选项target_link_libraries(myapp PRIVATE mylib)```在上面的示例中,我们首先使用`cmake_minimum_required`命令指定CMake的最低版本要求。
tinyshell 交叉编译

tinyshell 交叉编译TinyShell(Tinyshell)是一个轻量级的嵌入式shell,用于嵌入式系统。
交叉编译是在一个平台上生成另一个平台上运行的代码的过程。
为了在嵌入式系统上运行TinyShell,您需要进行交叉编译。
以下是交叉编译TinyShell的基本步骤:1. 安装交叉编译工具链:首先,您需要安装适用于目标嵌入式系统的交叉编译工具链。
这些工具链通常包括编译器、汇编器和链接器等。
您可以从交叉编译工具链提供商的网站上下载适用于您的目标系统的工具链。
2. 获取TinyShell源代码:可以从TinyShell的官方网站或GitHub存储库获取源代码。
确保下载适用于您的目标系统的正确版本。
3. 配置交叉编译选项:在开始交叉编译之前,您需要配置交叉编译选项。
这通常涉及编辑Makefile文件,指定交叉编译工具链的路径和目标架构。
4. 执行交叉编译:使用交叉编译工具链的编译器、汇编器和链接器等工具,执行交叉编译命令。
通常可以使用类似以下的命令:$ make ARCH=<target_arch> CROSS_COMPILE=<cross_compiler_prefix> 其中,<target_arch>是目标嵌入式系统的架构(如arm、arm64、x86等),<cross_compiler_prefix>是交叉编译工具链的前缀(如arm-linux-gnueabihf-)。
5. 生成可执行文件:交叉编译完成后,将生成适用于目标系统的可执行文件。
该文件可以在目标嵌入式系统上运行。
请注意,以上步骤是一个概述,具体的交叉编译过程可能因TinyShell的版本和目标系统而有所不同。
因此,建议您查阅TinyShell的官方文档或与相关的开发社区进行咨询以获得更详细和准确的指导。
Qt嵌入式开发环境搭建

Qt嵌入式开发环境搭建一、Qt版本介绍按照不同的图形界面来划分,分为四个版本:1、Win32版:适用于windows平台2、X11版:适用于各种X系统的Linux和Unix平台3、Mac版:适用于苹果的MacOS4、Embedded版:适用于具有帧缓冲(Frame buffer)的linux 平台Qtopia是基于qt开发的一个软件平台,Qtopia是构建于Qt/E 之上的一系列应用程序,在这个平台上我们可以开发各种应用程序。
2008年,TrollTech公司被Nokia收购后,Qtopia被重新命名为Qt Extended。
Nokia在推出了Qt Extended的最新版Qt Extended 4.4.3之后的2009年3月3日,决定停止Qt Extended的后续开发,转而全心投入Qt的产品开发,并逐步会将一部分Qt Extended 的功能移植到Qt的开发框架中。
所以总的来说,QT也就三种:面向桌面的x11、面向嵌入式的Qt/E、以及面向嵌入式带各种应用程序的Qtopia桌面系统二、比如是Qt的各种版本介绍1、Qt的安装程序(包含了QtCreator,QtAssistant)Windows--x86--msvc2012_64_opengl :表示window平台,msvc2012可以与VS2012进行结合使用,64位应用程序,要求电脑装的是64位操作系统;opengl表示支持openGL的绘图模式Windows--x86--mingw48_opengl :window平台下的mingw48编译器进行编译。
2、Qt的库的源码包3、Qt安装包的下载网址:如果想下载Qt的以前版本,可以在上面网址的最下面的一栏有个Archive for old versions ,进去就可以下载qt的以前版本了。
三、嵌入式Qt开发环境的搭建1.预备知识,嵌入式qt开发环境的安装方法很多,qt的版本也很多。
有点让人不知所措,不知该按哪种方法去安装。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验二、嵌入式交叉编译环境的搭建
1、实验目的:
通过本实验使学生掌握交叉编译环境的建立,了解在S3C2440上交叉编译环境搭建的原理及步骤。
2、实验设备及说明
1、安装ubuntu10及vmware的计算机
2、天嵌2440的开发板
3、实验指导书
4、天嵌开发板的超级终端设置
5、天嵌开发板开发文档
6、TQ2440使用手册v2.3---20100125
3、实验内容和步骤
1、安装交叉编译器:EABI4.3.3
●解压EABI 工具包
命令:tar zxvf /mnt/hgfs/(根据本机压缩包存储路径输入)/EABI 4.3.3.tar.gz –C / ##将压缩包解压到根目录下
●添加路径至全局变量PATH中
命令:PATH=$PAHT:/opt/EmbedSky/4.3.3/bin (此路径应根据本机的具体情况输入)
●查看全局变量PATH
命令:echo PATH ###查看刚才的添加是否成功
●查看交叉编译命令是否能够使用
命令:arm-linux-gcc –v ###如果刚才解压、添加变量成功,此时输入命令后,即可以显示命令的版本信息。
2、minicom
●在线安装minicom
命令:apt-get install minicom
●在命令行中键入“minicom”,这就启动了minicom软件。
●Minicom在启动时默认会进行初始化配置minicom -s
❝CTRL+A Z,来查看minicom的帮助
❝CTRL-A O配置minicom的串口参数,选择“Serial port setup”子项,上面列出的配置是minicom启动是的默认配置,用户可以通过键入每一项前的大写字母,分别对每一项进行更改.要对波特率、数据位和停止位进行配置,键入“E”,在该配置界面中,可以键入相应波特率、停止位等对应的字母,即可实现配置,配置完成后按回车键就退出了该配置界面。
在确认配置正确后,可键入回车返回上级配置界面,并将其保存为默认配置。
❝
可重新启动minicom使刚才配置生效,在连上开发板的串口线之后,就可在minicom 中打印出正确的串口信息
3、windows下超级终端设置
●打开Windows下的“开始”→“附件”→“通讯”→“超级终端”
●设置串口连接参数:波特率:115200,数据为8位,无奇偶校验位,停止位1,无硬件
流
●把开发板的串口线和PC机相连,在超级终端的窗口里应能显示相关的串口信息。
4、nfs的设置
NFS安装
NFS(Network File System/网络文件系统):
●设置Linux系统之间的文件共享;
●NFS只是一种文件系统,本身没有传输功能,是基于RPC协议实现的;
●NFS为C/S架构
在ubuntu下安装、配置nfs服务的步骤如下:
Ubuntu10.10配置TFTP和NFS
●已安装好tftp和nfs的情况下,请先进行卸载工作:
sudo apt-get remove tftpd tftp xinetd
sudo apt-get remove nfs-kernel-server
●安装NFS
Ubuntu上默认是没有安装nfs服务器的,因此我们首先安装nfs服务器端:
$sudo apt-get install nfs-kernel-server
●配置/etc/exports
NFS允许挂载的目录及权限在文件/etc/exports中进行了定义。
例如,我们要将根目录下的/source/rootfs目录共享出来,那么我们需要在/etc/exports文件末尾添加如下一行:
/source/rootfs *(rw,sync,no_root_squash)
其中:/source/rootfs是要共享的目录,*代表允许所有的网络段访问,rw是可读写权限,sync 是资料同步写入内存和硬盘,no_root_squash是NFS客户端分享目录使用者的权限,如果客户端使用的是root用户,那么对于该共享目录而言,该客户端就具有root权限。
其它nfs常用的参数有:
ro 只读访问
rw 读写访问sync 所有数据在请求时写入共享
async nfs在写入数据前可以响应请求
secure nfs通过1024以下的安全TCP/IP端口发送
insecure nfs通过1024以上的端口发送
wdelay 如果多个用户要写入nfs目录,则归组写入(默认)
no_wdelay 如果多个用户要写入nfs目录,则立即写入,当使用async时,无需此设置。
hide 在nfs共享目录中不共享其子目录
no_hide 共享nfs目录的子目录
subtree_check 如果共享/usr/bin之类的子目录时,强制nfs检查父目录的权限(默认)
no_subtree_check 和上面相对,不检查父目录权限
all_squash 共享文件的UID和GID映射匿名用户anonymous,适合公用目录。
no_all_squash 保留共享文件的UID和GID(默认)
root_squash root用户的所有请求映射成如anonymous用户一样的权限(默认)
no_root_squas root用户具有根目录的完全管理访问权限
anonuid=xxx 指定nfs服务器/etc/passwd文件中匿名用户的UID
anongid=xxx 指定nfs服务器/etc/passwd文件中匿名用户的GID
●重启服务
$sudo /etc/init.d/portmap restart
$sudo /etc/init.d/nfs-kernel-server restart
●测试nfs
此时可以运行以下命令来显示一下共享出来的目录:
$showmount –e 127.0.0.1
Export list for ubuntu:
/source/rootfs *
或者可以使用以下命令把它挂载在本地磁盘上,例如将/source/rootfs挂载到/mnt下:
$ sudo mount -t nfs 127.0.0.1:/source/rootfs /mnt
可以运行df命令查看是否挂载成功。
$ df
Filesystem 1K-blocks Used Available Use% Mounted on
/dev/sda1 19737268 11651080 7083592 63% /
none 248648 208 248440 1% /dev
none 254244 184 254060 1% /dev/shm
none 254244 108 254136 1% /var/run
none 254244 0 254244 0% /var/lock
127.0.0.1:/source/rootfs
19737280 11651072 7083648 63% /mnt
查看后可以使用以下命令卸载:$ sudo umount /mnt
●利用nfs方式远程挂载开发板
⏹此时将本地PC机的网络方式设置成为桥接
◆从虚拟机setting菜单上设置本地虚拟机ubuntu10的network adapter为”bridge”
方式
⏹必须将开发板同PC机上的IP地址设置成为同一个网段
◆利用ifconfig命令来修改IP地址在同一个网段,如修改本地PC机的IP地址
为ifconfig eth0 10.10.120.10;修改虚拟机的IP地址(在虚拟机的终端上键入命
令):ifcofig eth0 10.10.120.11
⏹测试:利用命令的方式将本地PC机上的根目录挂载到开发板的/tmp目录下
◆Mount –t nfs -o nolock,rsize=1024,wsize=1024 10.10.120.10:/ /tmp。