1090ES ADS-B地面站技术指标解析及测试方法推荐
ERA ADS-B地面站系统应用分析

ERA ADS-B地面站系统应用分析摘要:广播式自动相关监视(ADS-B)是一种新兴的空管监视技术,是未来空管监视技术发展的主要方向。
目前我国ADS-B技术主要作为雷达监视的补盲,主要应用在洋区和山区等边远地区。
西沙雷达站作为我国首批ADS-B技术试点台站之一,最先安装和使用了ADS-B 地面站设备。
本文主要对西沙雷达站使用的ERA ADS-B地面站系统的工作原理及应用情况进行简要介绍。
关键词:ERA ADS-B 地面站监视技术应用分析ADS-B是一种基于全球卫星定位系统(GNSS)和空地、空空数据链通信的航空器运行监视技术。
它通过广播航空器自身位置的方法,向空中交通管制(ATC)或者其他航空器提供航空器识别信息、位置、高度、速度、方向和爬升率等监视信息。
对传统的雷达技术而言ADS-B 技术有着建设成本低、定位精度高和刷新率快等方面的明显优点,可用于无雷达覆盖的航空管制盲区,作为类雷达管制监视和雷达补充监视。
1 ADS-B工作原理ADS-B系统通常由机载信息设备、机载ADS-B收发信机、ADS-B 地面站等组成。
机载信息设备一般由CDTI、机载GNSS接收机和其它机载信息源等组成,主要用于飞机自身定位和提供飞行器代码、高度和速度等信息。
机载ADS-B收发信机主要用于飞行器对外广播ADS-B数据信息,接收来自地面站的空中交通情报服务(FIS-B)和飞行情报服务(TIS-B)等信息,同时还能接收来自其他航空器的ADS-B信号用于进行空中识别,保障空中飞行间隔。
ADS-B地面站主要用于接收飞行器广播的ADS-B数据信息,并能将FIS-B和TIS-B等信息发送至飞行器。
地面站接收到的ADS-B数据信息可以同其他监视设备的信号通过监视信息处理进行合并,并通过数据融合/转发设备分别送至ATC中心。
2 ERA ADS-B地面站系统组成ERA ADS-B单机设备分为室外部分和室内部分。
室外部分主要由全向接收天线、GPS接收天线和测试信号天线组成;室内部分主要由SSR接收机、GPS接收和诊断单元、测量单元、控制单元、初级供电单元、次级供电单元、风扇单元以及本地监控电脑(LCMS)和远程监控电脑(RCMS)组成。
基于1090ES的ADS_BOUT系统的设计与实现
图2 扩展断续振荡信号的信号波形图
DF=17
CA
AA
ME
PI
5比特
3比特
24比特
56比特
图3 DF17格式的扩展断续振荡信号的飞行任务字段及位的分配
24比特
系统的处理流程
带有精确定位功能的GPS接收机 是DF17 格式的扩展断续振荡信号的主 要信号源,与S模式应答机协同工作的 GPS接收机符合NEMA 0183接口,可以 提供包括位置、速度、航向、高度等内 容的GPS数据。
工 程 ENGINEERING
基于1090ES的ADS-B OUT系统的 设计与实现
The Design and Implementation of ADS-B OUT System Based on 1090ES
■ 郑 超 刘志刚 王玉章/四川九洲电器集团有限责任公司
讨论了基于1090ES的ADS-B OUT系统的工作原理,并在此基础上
系统工作原理
ADS-B OUT系统的主要功能由S 模式应答机周期性的广播DF17格式的 扩展断续振荡信号来实现。DF17格式 的扩展断续振荡信号为地面和机载监视 系统提供相关的飞机信息,如飞机的位 置、速度、高度、航向、飞机代号、飞 机状态信息及24比特S模式地址码等。S 模式应答机接收来自GPS接收机的导航 信息,组合成适于S模式应答机传输的 报文格式,并以特定的速率通过天线将
等时线C是S模式应答机内部产生 的随机振荡触发信号。DF17格式的扩展 断续振荡信号平均每秒发生两次(上下 天线交替发送),以400~600ms的间隔 均匀分布在断续振荡之间。在等时线C 的起始时刻,S模式应答机就从内部寄 存中读取相应的ADS-B报文,并产生 标准的信号波形,调制后发送。
广播式自动相关监视(ADS-B)ADS-B全

国内外应用情况
亚太地区(TF/1,处于实验阶段)日本计划用 ADS-B增强雷达性能;澳大利亚在无雷达覆盖区布置 ADS-B印度利用ADS-B对雷达盲区进行补充,计划在Chennai进行一个试验;新加坡、日本和澳大利亚近期将在场面监视中利用ADS-B 技术;香港正在试验ADS-B用于机场场面监视;蒙古开始着手进行1090 ES和VDL Mode 4数据链实验;新西兰政府也应航空用户的要求批准在South Island进行一项ADS-B试验。
汇报内容
ICAO的研究情况
我国的发展规划
我国的发展情况
ICAO的研究情况
ICAOICAO考虑从2010年开始要求其成员国强制安装“ADS-B OUT”机载设备,自愿安装“ADS-B IN”机载设备和座舱显示器。ICAO预期1090 ES将能在未来至少十年内满足ADS-B服务的要求,未来可能需要另一种ADS-B数据链补充或替代1090 ES,以满足对ADS-B服务更高的运行需求。
技术概述
技术概述
ADS-B地面站
ADS-B “OUT”功能:
位置、高度、呼号、速度、爬升/下降率
可以在 TCAS或其他显示屏显示 观察范围比TCAS远 可以显示飞机的速度和呼号
可以在MFD或PDA上显示 接收频率为1090
空-空监视应用
ADS-B “IN”功能:
技术概述
技术概述
监视ห้องสมุดไป่ตู้段
广播式自动相关监视(ADS-B)
汇报内容
ICAO的研究情况
我国的发展规划
我国的发展情况
技术概述
ADS-B 含义A-自动:不需要人工操作和地面的询问。D-相关:信息全部基于机载设备。S-监视:提供位置和其它用于监视的数据。B-广播:数据不是针对某个特定的用户(在 ADS-C中是这样),而是周期性的广播给任何一 个有合适装备的用户。
浅析基于1090ES的ADS-B系统的CPR算法

• 29•浅析基于1090ES的ADS-B系统的CPR算法四川九洲电器集团有限责任公司 王新虎本文以RTCA DO-260A 中关于全局CPR 解码算法的运算过程为基础,从算法原理和工程应用方面,详细分析和解释算法意义,以及算法存在的问题和工程解决方法。
引言ADS-B 技术是现今新兴的一种监视手段。
其采用广播发射和全向接收机制。
ADS-B 系统由ADS-B 发射设备(ADS-B OUT )和ADS-B 接收设备(ADS-B IN )组成。
OUT 设备一般装载于飞机上,利用S 模式应答链路,定时广播自身导航信号(包括位置、高度、速度、航班信息等);IN 设备分为地面设备和机载设备,其接收并解析ADS-B 信号,将目标信息显示在监视器上,实现对ADS-B OUT 目标的实时监视。
1.CPR算法原理ADS-B 技术基于GNSS 实现,在ADS-B 信号中,载机的位置信息经CPR 算法转换成bit 数据,通过ADS-B 报文广播发射出去。
要理解其算法思想,首先需了解地球模型参数。
将地球近似成一圆球体,其平均半径为6371km ,周长为40030km ,将经度面(经子午线的圆面)等分为60段,每段6°,则每段弧长约为667km (360NM ),1′弧长约为1NM 。
为了保证位置精度,同时降低编码位数,实际飞机每秒的位置变化量不会很大,CPR 算法将纬度区等分为60段,空中位置用17bit 编码每段信息,即17bit 编码6°的长度,则其精度约为5.1m (360×1.852×1000÷217)。
为了保证经度区划分的每段zone 的长度为360NM ,随着纬度的升高,经度区划分的段数减少。
DO260A中给出的划分公式如下:lat =0°,NL =59;lat =﹢87°,NL =2;lat =﹣87°,NL =2;lat >﹢87°,NL =1;lat <﹣87°,NL =1;公式中NL 为当前纬度值lat 下经度zone 划分的数量,floor()是向下取整函数,NZ 值为15。
ADS-B 1090MHz ES标准
ADS-B 接收子系统应接收并处理格式为 DF=17、DF=18 且 CF=0 或 1 的 ADS-B 消息。当然,也可以处理 DF=19 且 AF=0 的 ADS-B 消息格式,但一般情况下对此 不予考虑。ADS-B 接收子系统不应处理 DF=18 且 CF≠0 或 1 的 ADS-B 消息格式, 对 DF=19 且 AF≠0 的 ADS-B 消息格式也不予处理。
2 小型(15500到75000磅)
或
或
小时
小时
尺
<100哩/
<100哩/
<50英
3 大型(75000到300000磅)
或
或
小时
小时
尺
高漩涡式大型(如B-757飞 <100哩/
<100哩/
<50英
4
或
或
机)
小时
小时
尺
<100哩/
<100哩/
<50英
5
重型(>300000磅)
或
或
小时
小时
尺
高性能(>5g加速度且> <100哩/
<100哩
<100哩/小
<50英
7 Space/trans-atmospheric
或
或
/小时
时
尺
ADS-B发射器类型设备“C”
编码
含义
0 无ADS-B发射器类别信息 总是报告空中位置消息(见2.2.3.2.3)
1
水面航行器-应急设备 总是报告地表面位置消息(见2.2.3.2.3)
1090ES数据链通信模式下的ADS
1090ES数据链通信模式下的ADS作者:吴逸群来源:《科学与财富》2018年第28期摘要:现代航空事业发达,每天均有大量航班处于工作状态,需要通过有效的监控了解其工作态势,进行必要的地空通信。
基于此,本文以1090ES数据链通信模式的优势作为切入点,对ADS—B技术下UAT、VDL-4和1090ES三种数据链通信模式进行对比,再以此为基础,论述1090ES数据链通信模式下的ADS—B应用,为后续的航班动态监控工作提供参考。
关键词: 1090ES;数据链通信;ADS—B;动态监控前言:ADS—B(Automatic Dependent Surveillance - Broadcast)即广播式自动相关监视,该技术摆脱了传统人工操作的困扰,可以自动进行通信作业,通过与机载设备的交互获取参数,向地面站输送飞机的位置、高度、速度、航向、识别号等信息,以便于导航和飞机控制作业。
现代航空事业的发展对动态监控的要求越来越高,分析上述内容和技术有一定的现实意义。
1.1090ES数据链通信模式的优势1.1ADS—B的三种模式ADS—B的三种模式分别是UAT、VDL-4和1090ES数据链通信模式。
三种模式中,UAT 模式出现的最早,20世纪50年代即已经应用于地空数据传输,技术简单,费用较低,能够满足CNS/ATM的各项通信标准要求,也能支持多种通信模式,对工作环境的要求较低,满足大规模应用需要。
VDL-4模式以自组织式时分复用多路(STDMA)方式作为核心原理,能够完成多个信号的同步接受,信息传输带宽可以达到25KHz的高水平,同时工作频率也比较理想,在118MHz-137MHz之间,这保证了系统较广的工作范围。
1090ES模式是S模式的一种,S模式数据信息传输采用PPM(Pulse Position Modulation)方式编码,应答编码是1090MHz,因此也称为1090ES模式,该模式传输能力尚可,可以进行一对一的精准通信,提高监控的实时价值[1]。
低成本实现1090ES模式ADS—B监控的方法
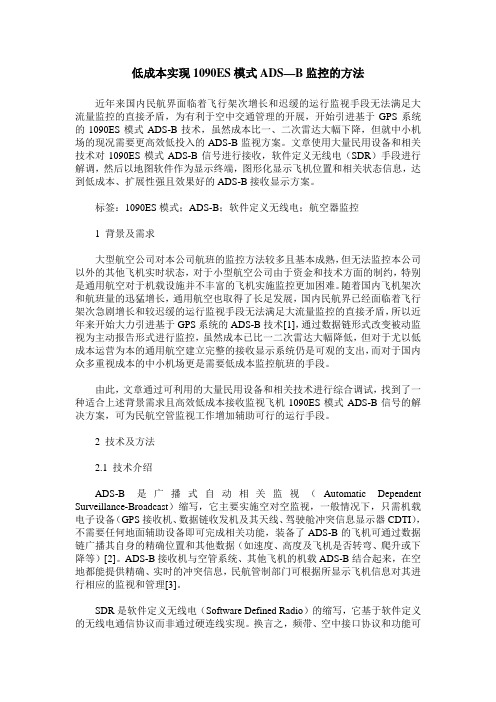
低成本实现1090ES模式ADS—B监控的方法近年来国内民航界面临着飞行架次增长和迟缓的运行监视手段无法满足大流量监控的直接矛盾,为有利于空中交通管理的开展,开始引进基于GPS系统的1090ES模式ADS-B技术,虽然成本比一、二次雷达大幅下降,但就中小机场的现况需要更高效低投入的ADS-B监视方案。
文章使用大量民用设备和相关技术对1090ES模式ADS-B信号进行接收,软件定义无线电(SDR)手段进行解调,然后以地图软件作为显示终端,图形化显示飞机位置和相关状态信息,达到低成本、扩展性强且效果好的ADS-B接收显示方案。
标签:1090ES模式;ADS-B;软件定义无线电;航空器监控1 背景及需求大型航空公司对本公司航班的监控方法较多且基本成熟,但无法监控本公司以外的其他飞机实时状态,对于小型航空公司由于资金和技术方面的制约,特别是通用航空对于机载设施并不丰富的飞机实施监控更加困难。
随着国内飞机架次和航班量的迅猛增长,通用航空也取得了长足发展,国内民航界已经面临着飞行架次急剧增长和较迟缓的运行监视手段无法满足大流量监控的直接矛盾,所以近年来开始大力引进基于GPS系统的ADS-B技术[1],通过数据链形式改变被动监视为主动报告形式进行监控,虽然成本已比一二次雷达大幅降低,但对于尤以低成本运营为本的通用航空建立完整的接收显示系统仍是可观的支出,而对于国内众多重视成本的中小机场更是需要低成本监控航班的手段。
由此,文章通过可利用的大量民用设备和相关技术进行综合调试,找到了一种适合上述背景需求且高效低成本接收监视飞机1090ES模式ADS-B信号的解决方案,可为民航空管监视工作增加辅助可行的运行手段。
2 技术及方法2.1 技术介绍ADS-B 是广播式自动相关监视(Automatic Dependent Surveillance-Broadcast)缩写,它主要实施空对空监视,一般情况下,只需机载电子设备(GPS接收机、数据链收发机及其天线、驾驶舱冲突信息显示器CDTI),不需要任何地面辅助设备即可完成相关功能,装备了ADS-B的飞机可通过数据链广播其自身的精确位置和其他数据(如速度、高度及飞机是否转弯、爬升或下降等)[2]。
基于1090ES的机载ADS-B设备总体设计

基于1090ES的机载ADS-B设备总体设计何进【摘要】介绍了1090ES ADS-B系统组成和信号格式,提出了一种基于1090ES一次变频的超外差中频数字化ADS-B设备总体实现方案,包括天线、收发分机、终端分机和机内测试电路设计,计算了关键技术参数,并简述了其主要技术特征.该方案目前已在工程中得到应用,效果良好.【期刊名称】《电讯技术》【年(卷),期】2011(051)007【总页数】5页(P25-29)【关键词】广播式自动相关监视;机载设备;中频数字化【作者】何进【作者单位】中国西南电子技术研究所,成都610036【正文语种】中文【中图分类】TN967.51 引言广播式自动相关监视(ADS-B)是国际民航组织(ICAO)推广的集通信、卫星导航和监视技术于一体的新一代技术,也是基于飞机监视技术的应用系统,是新一代空中交通管理系统的重要组成部分。
ADS-B信息以ADS-B报文形式,通过空-空、空-地和地-地数据链广播式传播。
当前,世界各国主要采用的数据链有1090MHz S模式扩展电文数据链(1090ES)、通用访问电台数据链(UAT)和甚高频数据链模式4(VDL Mode 4)等3种,其中1090ES是国际民航组织推荐使用的全球可互用ADS-B地空数据链。
目前,国内有关ADS-B综述[1-3]和S模式应答机[4,5]应用介绍的资料较多,但对1090ES体系架构、设备实现介绍甚少。
民航飞机实现ADS-B IN功能常采用TCAS系统,ADS-B OUT功能采用S模式应答机,而能完整实现两个功能的独立设备很少,且这些设备基本上都被国际大公司垄断。
本文根据国际民航组织附件10(2007版)航空通信第4部分[6]对1090ESADS-B机载A3类设备的具体要求,提出了一种基于1090ES一次变频的超外差中频数字化ADS-B设备总体设计方案。
2 系统组成及信号格式2.1 系统组成1090ES ADS-B系统[6]主要由外部的输入数据源、1090ES ADS-B OUT数据发射子系统[7]、1090ES ADS-B IN数据接收子系统及输出数据客户应用4部分组成,如图1所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1090 ES ADS-B 地面站技术指标解析及测试方法推荐 Technique specification and testing method of1090 ES ADS-B ground station1. 引言广播式自动相关监视ADS-B(Automatic Dependent Surveillance-Broadcast)是一种基于全球卫星定位系统和利用空地、空空数据链通信完成交通监视和信息传递的空管监视新技术[1]。
国际民航组织已经将ADS-B 作为未来监视技术的主要发展方向,国外许多国家和地区都在积极推进该项技术的应用。
中国民航结合自身监视的现状和未来发展的需求,确定了我国运输航空ADS-B 采用1090MHz 扩展电文(简称1090 ES )数据链技术,并制定了ADS-B 发展规划、应用原则和总体策略,提出了中国民航ADS-B 地面站的建设实施路线。
为了保证ADS-B 实施和建设的质量,中国民航努力推行地面站(接收)设备使用许可测试工作,颁布了相应的行业标准《1090兆赫扩展电文广播式自动相关监视地面站(接收)设备技术要求(MHT4036-2012)》(简称技术要求),旨在规范地面站设备的设计与制造过程,保证地面站设备的产品质量及性能指标能够满足应用要求。
由于ADS-B 技术在国内的应用还比较少,国内大多数民航从业者未实际接触过地面站设备,对技术要求中的各种指标及其测试方法也不甚了解。
因此,有必要针对其中的部分技术指标进行解释和说明,并在此基础上推荐合理的测试方法,使其可作为地面站(接收)设备的使用许可测试、工厂及现场验收、定期维护等工作的参考。
2. 1090 ES ADS-B 地面站(接收)设备1090 ES 地面站(接收)设备是ADS-B 系统的重要组成部分,它通过接收、解码由航行器和场面车辆广播的信息,经处理后产生标准的数据报告传给用户。
符合技术要求规定的地面站系统框架如图1所示。
信标机1090ES 地面站主机#2GNSS 天线1090ES 地面站主机#1GNSS 天线以太网交换机#1以太网 交换机#2RF 天线RF 天线监控维护用户1090ES ADS-B地面站(接收)设备图1 1090ES ADS-B 系统框架图地面站可以同时向多个用户系统提供服务,为了确保与现有监视数据处理系统的兼容,采用标准的ASTERIX Category 021[2]报文作为其报告输出格式。
该报告输出模式包含数据驱动传输模式和周期性传输模式两种,其中前者被大多数国内外设备生产厂家所采用,它是在每次成功解码ADS-B 信息后产生报文输出的传输模式;而后者是一种时间可设置的周期性报文输出模式。
此外,ADS-B 服务还可以包括周期性输出地面站状态报告(ASTERIXCategory 023[3])和ASTERIX 版本报告(ASTERIX Category 247[4])。
3. 1090 ES ADS-B 地面站(接收)设备测试模型3.1 测试设备连接地面站(接收)设备大部分技术指标的测试方法基本使用相同或类似的测试仪表和设置,所以有必要给出一个标准的测试模型,见图2。
1090ES ADS-B地面站(接收)设备UTC 时间基准ASTERIX 报告记录分析仪电源信号源干扰源图2 标准测试模型信号源:能够同时模拟多于600个目标,每个目标每秒可包含位置信息、速度信息、航空器识别信息、目标状态信息、航空器运行状态信息等多个种类的射频信息,信息编码需要满足航空无线电技术委员会(RTCA )的DO-260A [5]文件的要求,同时要求输出的射频功率可调。
干扰源:能够产生模式A/C 和模式S 长、短信息的射频信号,其个数及输出的射频功率可调。
ASTERIX 报告记录分析仪:实时侦听并接收网络上的ASTERIX 数据报文,为每一条接收到的报文标记时间戳,并对报文数据进行逐项解析,判断其正确性和完整性,统计接收的数据报文数量,以及给出各类统计报告。
若报文出错,会自动给出提示及报告。
UTC 时间基准:时间基准信号用于同步地面站内部时钟。
3.2 地面站测试前的初始状态按照图2所示连接测试设备,各设备处于正常工作状态,能正常接收UTC 时间基准信号。
ASTERIX Category 021报告输出模式应选择数据驱动传输模式。
信号源模拟产生的目标在每次测试前需完成目标位置信息的初始化,初始化过程从接收到目标的第一个信息开始,在初始化期间,地面站并不会产生ASTERIXCategory 021报告。
典型的做法是在正确接收到2个奇偶信息对后确定获取目标,并输出报告。
没有特殊说明,干扰源一直处于无输出状态。
4.技术指标及其测试方法以下的测试均忽略了线缆的损耗,在实际测试中应予以考虑。
4.1 接收机正确探测解码率正确探测解码率是指地面站接收机正确接收并解码的信息占总输入信息的比例。
由于不是所有的地面站设备都具有原始脉冲信息输出的能力,所以一般无法直接测量接收机的正确探测解码率。
如果假定这些正确接收并解码后的信息,在后续的处理、输出过程中没有产生错误,那么通过统计最终输出的报告个数,可以计算正确探测解码率。
在不同的条件下(例如不同的输入功率、不同的干扰信号等),对地面站设备的正确探测解码率会有不同的要求。
4.2 接收机灵敏度接收机灵敏度可以理解为MTL(最低触发电平),它是指输入信号的频率在1089MHz-1091MHz范围内,在没有干扰和重叠的情况下,当接收机的正确探测解码率为90%时,输入信号的射频功率电平。
同时,它还应该满足以下要求:在1089MHz-1091MHz的范围内,在没有干扰和重叠的情况下,输入信号电平为-88dBm时,接收机正确探测解码率应不小于90%;输入信号电平为-91dBm时,接收机正确探测解码率应不小于15%。
参考测试步骤:1)地面站处于测试前的初始状态。
2)ASTERIX报告记录分析仪统计正确探测解码率。
3)设置信号源模拟产生300个目标,每个目标每秒产生4个信息。
4)设置射频频率为1090MHz,逐渐降低信号源的射频功率,直至正确探测解码率不小于90%时,测试信号源输出的射频功率即为MTL。
5)重复步骤4得到信号源载波频率为1089MHz和1091MHz时的MTL。
6)分别设置射频频率为1089MHz、1090MHz和1091MHz,设置射频功率为-88dBm,确认此时的正确探测解码率应不小于90%。
7)分别设置射频频率为1089MHz、1090MHz和1091MHz,设置射频功率为-91dBm,确认此时的正确探测解码率应不小于15%。
4.3 接收机动态范围在没有干扰和重叠的情况下,输入信号电平从MTL+3dB开始在整个动态范围内,地面站接收机的正确探测解码率应不小于99.9%。
参考测试步骤:1)地面站处于测试前的初始状态。
2)ASTERIX报告记录分析仪统计正确探测解码率。
3)设置信号源模拟产生300个目标,每个目标每秒产生4个信息。
4)设置射频频率为1090MHz,信号源的射频功率为MTL+3dB,确认正确探测解码率不小于99.9%。
5)以10dB为步进逐渐增大信号源的射频功率至MTL+78dB,确认每次测得的正确探测解码率不小于99.9%。
4.4 目标处理能力技术要求中规定设备的目标处理能力应大于每秒600批目标(均匀分布)。
目标处理能力实际上就是系统的处理容量,是指在没有干扰和重叠的情况下,1090 ES地面站在一秒钟内可以处理的独立目标的个数,这些目标必须以符合DO-260/A标准的速率广播信息,同时以最大的每个目标每秒4个的速率输出ASTERIX Category 021报告。
参考测试步骤:1)地面站处于测试前的初始状态。
如果地面站设备具有处理能力门限参数设置选项,建议设置该参数值高于信号源所产生的目标数。
2)设置信号源模拟产生600个目标,设置射频频率为1090MHz,输出功率应大于或等于MTL+3dB。
注:输出的功率值应保证接收机的正确探测解码率不小于99.9%。
3)在信号源输出10秒后,ASTERIX报告记录分析仪开始记录数据。
这里说明一下,延迟10秒才开始记录是为了保证全部的目标初始化过程已完成。
4)记录的时间根据不同的精度要求而定,但至少应持续2分钟。
5)统计记录的数据,确认每秒收到600个目标的报告,每个目标每秒的平均报告数量为4±1%。
6)如果地面站输出ASTERIX Category 023报告,同时应确认项目I023/100的ODP位为0,表示目标没有超载。
4.5 设备处理延时技术要求中规定设备处理延时应不大于50ms。
这里的处理延时应该是在一定的FRUIT 干扰环境[6]下,从接收到ADS-B信息到输出目标报告的最大延迟时间,这个指标只在数据驱动传输模式下适用。
这个时间实际上无法使用仪器仪表去测量,一般是测量信号源从产生模拟信号至记录输出报告的最大时间,如果这个时间符合要求,那么设备的处理延时就符合要求。
值得注意的是,在整个测试过程中必须使各个设备和仪表保持时间同步。
参考测试步骤:1)地面站处于测试前的初始状态。
2)设置信号源模拟产生30个固定或移动的目标,为了便于鉴别和分析,这些目标可使用连续的地址码。
设置射频频率为1090MHz,输出功率应大于或等于MTL+3dB。
3)设置干扰源产生FRUIT干扰信号,S模式的干扰信号可使用随机的地址码,但必须不同于前面30个目标信号的地址码。
4)使模拟信号和干扰信号在时间上不产生重叠,将以上信号注入地面站设备,记录产生模拟信号时的UTC时间。
5)ASTERIX报告记录分析仪开始记录数据。
6)记录一段时间后,分析记录的报告,查找每个报告对应的输入信息,计算报告与信息产生的时间差。
4.6 抗干扰能力技术要求中要求地面站设备应具有抗多径干扰和同频干扰的能力,以及分辨二重交织码的能力。
同时地面站接收机在每秒4000次的应答串扰情况下,正确探测解码率应不小于90%。
多径干扰主要是由于信息经反射后延迟到达,对正常接收的信息造成的干扰。
测量是否具备抗多径干扰,可考虑让地面站接收机连续接收同一个目标信息多次,每次产生的信息较前一个信息延迟一段时间,如果地面站只输出一个数据报文,说明其具备抗多径干扰能力。
由于每个厂家的设计有所不同,针对抗多径的延时时间也会有所不同,而且不可能太大,一般延时时间的选择不超过200微妙。
由于没有明确说明,所以同频干扰应考虑1090MHz的载波干扰和脉冲干扰两种。
A/C 模式的应答串扰实际上就是同频脉冲干扰,测量时可使干扰源每秒产生4000个A/C模式的应答,实际情况下应答的脉冲有一半的几率存在,可使用7070等应答码作为干扰脉冲。
信号源应产生足够的信息量,与干扰源产生的1090MHz载波或脉冲信号叠加后送入地面站,通过调整干扰源的输出功率,使正确探测解码率不小于90%。