计算机系统结构多处理机
计算机体系结构-第7章 多处理机
第7章 多处理机
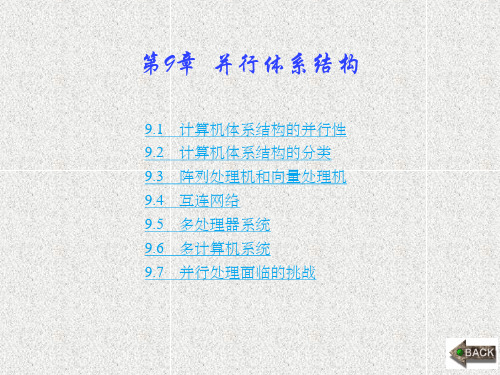
主 CPU
主存
CIOP
高速系统总线 BIOP NIOP GIOP
ACOP
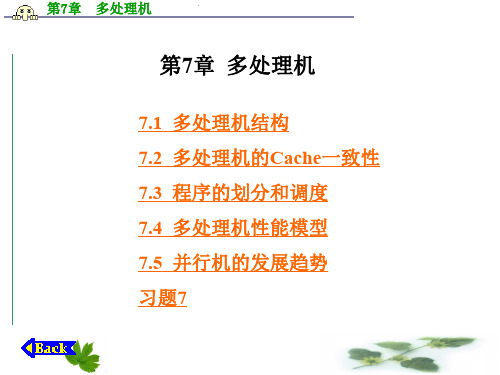
CIOP----字符处理机 BIOP----数组处理机 NIOP----网络处理机 GIOP----图形处理机 ACOP----向量加速处理机
图7.5 异构非对称式多处理机的一般结构
第7章 多处理机
2. 松耦合(loosely coupled)多处理机 松耦合多处理机是通过消息传递方式来实现处理机间的相互通 信的。 而每台处理机是由一个独立性较强的计算机模块组成,该模 块由处理器、较大容量的本地存储器(在运算时所需的绝大部分的 指 令 和 数 据 均 取 自 本 地 存 储 器 ) 、 I/O 设 备 以 及 与 消 息 传 递 系 统 (Message Transfer System,MTS)相连的接口组成。当不同模块上 运行的进程间需要通信时,可通过网络接口电路及消息传递系统 进行信息交换。由于这种相互间的耦合程度是很松散的,因此称 之为松耦合多处理机。 松耦合多处理机可分为非层次式和层次式两种结构。
第7章 多处理机
(5)合理地进行资源分配和任务调度。 在MIMD多处理机中,由于任务的大小不相同, 各处理机的速度也可能不相同(如异构型多处理机系统), 互连网络的拓扑结构和通信延迟在不同的多处理机中 也有很大的差别,在执行并发任务时,并不是使用的 处理机个数越多,系统获得的性能就越高。因此需要 采用软件手段,合理地进行资源分配和任务调度,否 则系统性能将受较大影响。而在SIMD并行处理机中, 程序员只需用屏蔽的手段来设置部分处理单元为不活 跃状态,来控制实际参加并行操作的处理单元数目。
因此,Cm*是一个三层总线多处理机,三级的访 存时间分别为:计算机模块内3.5μs,计算机模块群内 9.3μs,而群间则为26μs。
计算机系统结构复习题(含参考答案)
02325计算机系统结构复习题一、单项选择题1.多处理机上两个程序段之间同时有先读后写和先写后读两种数据相关,则(C )A.交换串行B.不能并行执行C.必须并行执行D.顺序串行2.输入输出系统硬件的功能对下面哪一类人员是透明的(A)A.应用程序员B.操作系统程序员C.机器语言程序设计员D.系统结构设计人员3.输入流水线的指令既无局部性相关也没有全局性相关,则( B )A.出现瓶颈B.可获得高的吞吐率和效率C.可靠性提高D.流水线的效率和吞吐率恶化4.相对较好的处理浮点数尾数的下溢的方法是( D )A.舍入法B.恒置1法C.截断法D.查表舍入法5.以下属于操作级并行SIMD计算机的是( A )A.阵列处理机B.多处理机C.超标量处理机D.超流水线处理机6.数据表示的含义是( C )A.程序中的数据格式B.数据结构C.硬件能直接识别引用的数据类型D.数据类型7.下面不是流水机器全局相关的处理方法的是( B )A.采取延迟转移B.堆栈法C.猜测法D.加快短循环程序的处理8.面向堆栈的寻址( D )A.能更好地支持向量的运算B.比面向寄存器的寻址访问速度快C.能更好地支持矩阵运算D.有利于子程序嵌套、递归调用参数、返回地址与现场的保存和恢复9.中断的优先级由高到低的是( D )A.程序性→I/O→机器校验B.外部→重新启动→程序性C.I/O→程序性→掉电D.通路错→程序性→I/O→重新启动10.多端口存储器适合于连接( C )A.机数很多的多处理机B.机数可变的多处理机C.紧耦合多处理机D.松耦合多处理机11.关于归约机的描述正确的是( B )A.归约机不是基于数据流的计算模型B.归约机采用需求驱动,执行的操作序列取决于对数据的需求C.归约机不是以函数式语言为机器语言D.归约机采是Von Neumann型计算机12.关于静态流水线的描述正确的是( A )A.某一时间内各段只能按一种功能联接流水的多功能流水线B.功能固定的流水线C.各段之间的连接是固定不变D.某一时间内可执行多种功能13.多处理机机间互连采用总线形式的优点是( A )A.结构简单、造价低、可扩充性好B.适用于处理机机数较多的场合C.系统增减模块不方便D.没有访问公用总线的冲突14.位片处理是指计算机采用___________方式对数据进行处理。
计算机系统结构中多处理机技术

e pr blm as he s e o ak i c r i ton,et rrl e und n r es ra d r c m b n t blt si rie s tm ai e e - d o e rie t pe d t s n oo dnai ihe ey on r d a tp oc so n e o i ae a ii i t as yse tc d p nd y a ii ,a a a i t nd c n s n o pee tt c m e blt y d ptbly a a pe d c m t n o o i .Th stx si r uc d t veo i e tha ntod e he de l pm e ft ir pr c so ,c mm u c to , nto he m c o o es r o niai n d v lpm e to h e o e hnoog nd t O kndso ca y tm ai tucu e ofm a y pr c so si t e b fm a y pr c so sa e eo n ft e m m r t c y l y a W i fs ils se t sr t r n o es r n h uso n o es r nd pe c
v r t o u t C ia He g a g4 1 0 , hn ) es f o nh hn , n y n 2 0 1 C i i y S a
Absr c :M any so ng o np tn O p tng t ub y tm rt e hih—s e o m u c t t o k a ar ng o c l u c — ta t i l t r ri utig f Ututi he s s se o h g i pe d c m niai new r nd c ryi n onm nia on to h ou h s rng o a y pr c sor i n t r g hai fm n o e s s.U tl em a y s t o oc sorc ry n a y ts e lw ih , si oveon a n omplc t iz n es fpr e s ar o m n ak d a t i i ts l e he W a d c ia-
多处理机new
1. 二维数组的无冲突访问存储器 • 要求:一个n×n的二维数组,按行、列、对 角线和反对角线访问,并且在不同的变址位 移量情况下,都能实现无冲突访问。 • 顺序存储:按行、对角线访问没有冲突,但 按列访问每次冲突
0 号体 体内地址 0 1 2 3
2012年8月15日星期三
1 号体
2 号体
3 号体
16
3. 二维数组的无冲突访问存储方案(之二) • 规则:对于任意一个n×n的数组,如果能够 找到满足n=22P关系的任意自然数p,则这个 二维数组就能够使用n个并行存储体实现按行、 列、对角线和反对角线的无冲突访问。 • 4×4数组用4个存储体的无访问冲突存储方案
0 号体 体内地址 0 1 2 3
或(SSM,Scalable Shared-Memory)
物理上分离的多个存储器可作为一个逻辑上共享的 存储空间进行编址.
• 通信机制:可利用Load和Store指令中的地址隐 含地进行数据通信. 2.多计算机(multicomputers)
整个地址空间由多个独立的地址空间构成,它们在逻 辑上是独立的,远程的处理器不能对其直接寻址.
2012年8月15日星期三 计算机系统结构 第九章 多处理机 18
7.2.1.2 多处理机的Cache一致性
1. Cache不一致性原因
• 在并行处理机和多处理机系统中,采用局部 Cache会引起Cache与共享存储器之间的一致 性问题。 • 出现不一致性问题的原因有三个: 共享可写的数据、进程迁移、I/O传输
第七章 多处理机
• 多处理机定义: 两个或两个以上处理机(包括PU和CU),通 过高速互连网络连接起来,在统一的操作 系统管理下,实现指令以上级(任务级、 作业级)并行。 • 按照Flynn分类法,多处理机系统属于 MIMD计算机 • 研究多处理机的目的:提前10年得到性能 高100倍的高性能计算机系统。
超标量处理机和超流水线处理机——计算机系统结构

超标量处理机和超流⽔线处理机——计算机系统结构在表5.2中,基准标量处理机是⼀台普通的单流⽔线处理机。
为了便于进⾏⽐较,把基准标量处理机的机器流⽔线周期和指令发射等待时间都假设为1个时钟周期,同时发射的指令条数为⼀条,它的指令级并⾏度ILP(Instruction Level Parallelism)假设为1。
另外三种指令级并⾏处理机,即并⾏度为m的超标量处理机,并⾏度为n的超流⽔线处理机,以及并⾏度为(m,n)的超标量超流⽔线处理机,它们的性能都相对于基准标量处理机进⾏⽐较。
单流⽔线处理机只有⼀条指令流⽔线,只有⼀个多功能的操作部件,每个时钟周期"取指令"和"分析"完成⼀条指令。
在许多流⽔线处理机中,指令流⽔线的流⽔段数k=4;它把⼀条指令的执⾏过程主要分解为"取指令"、"分析"、"执⾏"和"写结果"4个阶段。
指令所要执⾏的功能主要在多功能操作部件中,在"执⾏"这⼀流⽔段完成。
多数流⽔线处理机的多功能操作部件采⽤流⽔线结构。
有的简单指令,只要⼀个时钟周期就能够在"执⾏"流⽔段中完成,⽽⽐较复杂的指令往往需要多个时钟周期。
另外,还有条件转移等的影响;因此,⼀般流⽔线标量处理机每个时钟周期平均执⾏指令的条数⼩于1,即它的指令级并⾏度ILP<1。
超标量、超流⽔线和超标量超流⽔线三种处理机在⼀个时钟周期内可以执⾏完成多条指令,即它们的指令级并⾏度ILP都⼤于1。
超标量处理机基本结构超标量处理机的典型结构是有多个操作部件,⼀个或⼏个⽐较⼤的通⽤寄存器堆,⼀个或两个⾼速Cache。
先进的超标量处理机⼀般都包含有三个处理单元,⼀个是定点处理单元,通常称为中央处理单元(CPU),它由⼀个或多个整数处理部件组成;第⼆个是浮点处理单元(FPU),它由浮点加减法部件和浮点乘除法部件等组成;第三个是图形加速部件,也称为图形处理单元(GPU),这是现代处理机中不可缺少的⼀个部分。
计算机系统结构课后答案uint7
第七章课后题1.多处理机在结构、程序并行性、算法、进程同步、资源分配和调试上与并行处理机有什么差别?答:多处理机与并行处理机的主要差别是并行性的等级不同。
(1)结构灵活性。
多处理机制结构灵活性高于并行处理机。
(2)程序并行性。
多处理是指令、任务、作业并行,并行性的识别较难;并行处理机是操作级并行,并行性的识别较易。
(3)并行任务派生。
并行处理机工作能否并行工作由指令决定,多处理机必须有专门指令指明程序能否并行执行,派生的任务数是动态变化的。
(4)进程同步。
并行处理机的进程同步是自然的,而多处理机必须采取同步措施。
(5)资源分配和任务调度。
多处理机的资源分配和任务调度比并行处理机复杂得多。
2.多处理机有哪些基本特点?发展这种系统的主要目的可能有哪些?多处理着重解决哪些技术问题?答:○多处理机的基本特点:多处理机具有两台以上的处理机,在操作系统控制下通过共享的主存或输入/输出子系统或高速通讯网络进行通讯.结构上多个处理机用多个指令部件分别控制,通过机间互连网络通讯;算法上不只限于处理向量数组,还要实现更多通用算法中的并行;系统管理上要更多地依靠软件手段,有效解决资源分配和管理,特别是任务分配,处理机调度,进程的同步和通讯等问题.○使用多处理机的目的:一是用多台处理进行多任务处理协同求解一个大而复杂的问题来提高速度,二是依靠冗余的处理机及其重组来提高系统的可靠性,适应性和可用性.○多处理着重要解决的技术问题:(1)硬件结构上,如何解决好处理机、存储器模块及I/O子系统间的互连。
(2)如何最大限度开发系统的并行性,以实现多处理要各级的全面并行。
(3)如何选择任务和子任务的大小,即任务的粒度,使并行度高,辅助开销小。
(4)如何协调好多处理机中各并行执行任务和进程间的同步问题。
(5)如何将任务分配到多处理机上,解决好处理机调度、任务调度、任务调度和资源分配,防止死锁。
(6)一旦某个处理发生故障,如何对系统进行重新组织,而不使其瘫痪。
《计算机组成与系统结构》课件第9章
2) 多级互连网络 另一种组织与控制更为有效的交换网络是基于a×b交换 开关构造而成的。2×2交换开关是一种最常用的二元开关, 如图9.13(a)所示,它有两个输入和两个输出,从任意输入 线到达的消息都可以交换到任意的输出线上。
图 9.13 2×2的交换开关
图 9.14 Omega网络
多级互连网络设计的关键是: (1) 选择何种交换开关; (2) 交换开关之间采用何种拓扑连接; (3) 对交换开关采用何种控制方式。
图 9.3 计算机分类
9.3 阵列处理机和向量处理机
9.3.1 阵列处理机 阵列处理机属于分布式内存SIMD(DM-SIMD)系统,它
由许多在不同数据集合上执行同样指令序列、完成同样功能 的完全相同的处理器组成。阵列处理机中的处理器共享一 个控制器(所以它不是通常意义上的独立CPU),控制器发布 指令,指令由处理器阵列中的处理器执行。因为阵列机中的 所有处理器是以步调一致的方式工作的,所以处理器之间不 需要同步,这就大大简化了这种系统的设计。
向量-寄存器处理器的基本组成如图9.5所示,它是以 Cray-1为基础的一个模型,标量部分是MIPS,向量部分是 MIPS的逻辑向量扩展,其主要模块功能如下:
(1) 向量寄存器组。 (2) 向量功能单元。 (3) 向量Load-Store部件。 (4) 标量寄存器组。
图 9.5 基本的向量-寄存器体系结构
9.4 互 连 网 络
9.4.1 基本概念 互连网络(Interconnection Network)是一种由开关元件按
照一定的拓扑结构和控制方式构成的网络,用于实现计算机 系统中部件之间、处理器之间、部件与处理器之间甚至计 算机之间的相互连接,
根据连接的设备数和设备的接近程度,可以将互连网络 分为以下四类:
计算机系统结构08SIMD计算机(并行处理机)121106
B6700 内存
B6700 CPU
48
48 BIOM 128
CDC
...
DFS
I/O 总线
256 1024
256
IOS
1024
16
实 时 装 置
1.阵列控制器 阵列控制器CU实际是一台小型计算机。 对阵列处理机单元实行控制和完成标量操作。 标量操作与各PE的数组操作可以重叠执行。 控制器的功能有以下五个方面: (1)对指令进行译码,并执行标量指令; (2)向各PE发出执行数组操作指令的控制信号; (3)产生地址,并向所有处理单元广播公共地址; (4)产生数据,并向所有处理单元广播公共数据; (5)接收和处理PE、I/O操作以及B6700产生的陷 阱中断信号。
25
3.文件存储器 (1)计算任务文件从系统管理机家载到文件 存储器,由控制处理机执行。 (2)文件存储器是在BSP直接控制下的唯一 外围设备。 (3)程序执行过程中所产生的暂存文件和输 出文件,在将它们送给系统管理机输出 给用户之前是存在文件存储器中的。 (4)文件存储器的数据传输率较高,大大地 缓解了I/O受限制问题。
14
8.3.1 lllialv并行处理机
(1)1963年,美国西屋电器公司提出“Slotnick,The SOLOMON Compuer,Simultaneous Operation linked Ordinal Modular Network”. (2)1966年美国国防远景研究规划局ARPR与伊利诺 依大学签定合同。原计划:256PE,运算速度为 1GFLOPS。 (3)Burroughs公司和伊利诺依大学于1972年共同设 计和生产,1975年实际投入运行。用了4倍的经 费,只达到1/20的速度。只实现了8*8=64个PE, 只达到50MFLOPS。 (3)llliaclv的影响非常大。它是并行处理机的典型代 表,也是分布存储器并行处理机的典型代表。 15
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
并行性在很大程度上依赖于R/C比值 其中:R: 程序执行时间,C: 通信开销 R/C小,并行度低。R/C大,并行性高。 把作业分解成较大的块,能得到较大的R/C, 但所得到的并行性小 R/C是衡量任务粒度(Granularity)的尺度 粗粒度(Coarsegrain)并行:R/C大,通信开销小 细粒度(Finegrain)并行:R/C小,通信开销大 细粒度并行性是程序尽可能地分解成小任务, 在极端情况下,一个小任务只完成一个操作
紧密偶合方式要求有很高通信频带。 可以采用如下措施: (1)采用高速互连网络 (2)增加存储模块个数,一般nm,取1~2倍 之间。 (3)每个存储模块再分成多个小模块,并采用 流水线方式工作。 (4)每个CPU都有自己的局部存储器LM。 (5)每个CPU设置一个Cache。
CPU0 MAP
CPU1 MAP …
第9章 多处理机
9.1 多处理机结构
9.2 多处理机性能模型 9.3 多处理机的Cache一致性 9.4 大规模并行处理机 9.5 对称多处理机 9.6 机群系统
多处理机定义: 两个或两个以上处理机(包括PU和CU),通 过高速互连网络连接起来,在统一的操作 系统管理下,实现指令以上级(任务级、 作业级)并行。 按照Flynn分类法,多处理机系统属于MIMD 计算机 研究多处理机的目的:提前10年得到性能高 100倍的高性能计算机系统。
9.1.2 松散偶合多处理机
处理机之间的连接频带比较低 处理机之间互为外围设备进行连接。 通过并行口或串行口把多台计算机连接起来。 多台计算机之间的连接需要有多个接口。 通过Ethernet网络接口连接多台计算机。 速度达10Mb、100Mb、1Gb,Mynet已经达到1.28Gb 和2.56Gb。 当通信速度要求更高时,可以通过一个通道和仲裁开 关CAS (Channel and Arbiter Switch)直接载存储器总 线之间建立连接。
9.2 多处理机性能模型
引起峰值性能下降的原因: (1)由于处理机之间通信而产生的延迟。 (2)一台处理机与其它处理机同步所需的开销。 (3)当没有足够多任务时,一台或多台处理机处 于空闲状态。
(4)由于一台或多台处理机执行无用的工作。
(5)系统控制和操作调度所需的开销。
研究多处理机的目的:
单处理机的速度提高很快, 为什么还要研究多处理机?
阵列处理机把同种操作集中,由指令直接启动各 PE同时工作。 多处理机用专门的指令来表示并发关系,一个任 务执行时能够派生出与它并行的另一些任务 如果没有空闲处理机,任务进入排队器等待
4. 进程同步
阵列处理机仅一个CU,自然是同步的。 多处理机中,各处理机执行不同的指令,工作进 度不会也不必保持相同。先做完的要停下等待。 有数据相关和控制相关也要停下等待。
• 按照PE与IOP之间互连方式: 对称型:每个IOP能够连接到所有PE上 非对称型:每个IOP只与一个PE连接。 冗余对称型:一个PE与多个IOP连接。 • 按照存储器的访问方式: 均均存储器,UMA模型 非均均存储器,NUMA模型 只有Cache,COMA模型 • 另外,多向量处理机,机群系统等也称为多处 理机系统。
处理机之间共享主存储器,通过高速总线或高 速开关连接。 每个CPU能够访问任意一个存储器模块 通过映象部件把全局逻辑地址变换成局部物理 地址 通过互连网络寻找合适的路径,并分解访问存 储器的冲突 多个输入输出处理机IOP也连接在互连网络上, 输入输出设备与CPU共享主存储器。 处理机个数不能太多,一般几个到几十个。
CPU-MM 互连网络 MM0,0 MM0,n-1 MM1,0 MM1,n-1 … MMm-1,0 … MMm-1,n-1
带有二维共享存储器和局部 Cache 及存储器的多处理机
9.1.4 多处理机系统的特点
1. 结构灵活
阵列处理机:专用,PE数多,固定有限通信 多处理机: 通用,PE数少,高速灵活通信
9.1 多处理机结构 9.1.1 多处理机分类 9.1.2 松散偶合多处理机 9.1.3 紧密偶合多处理机 9.1.4 多处理机系统的特点
9.1.1 多处理机分类
多处理机系统由多个独立的处理机组成,每个 处理机都能够独立执行自己的程序。 按照处理机之间的连接程度:紧密偶合和松散 偶合多处理机 按照是否共享主存储器:共享存储器和分布存 储器多处理机 按照处理机类型:同构型和异构型多处理机 按照处理机的个数:大规模并行处理机MPP和 对称多处理机SMP
CPUn-1 MAP IOP0
CPU-MM-IOP 互连网络
IOP1
IOPd-1 MM0 MM1 … MMm-1
紧密偶合多处理机模型
IOP0
IOP1
…
IOPd-1
CPU-IOP 互连网络 …
CPU0 MAP Cache LM
CPU1 MAP Cache
CPUp -1 MAP Cache LM
LM
2. 程序并行性
阵列处理机的并行性存在于指令内部,识别 比较容易。多处理机的并行性存在于指令外 部,在多个任务之间,识别难度较大。 一个简单的例子: Y = A+B*C*D/E+F,用两个处理机计算: CPU1:B*C, A+F, A+B*C*D/E+F CPU2:D/E, B*C*D/E,
3. 并行任务派生
要采取同步措施来保持程序要求的正确顺序
5. 资源分配和进程调度
阵列处理机的PE是固定的,用屏蔽来改变实际 参加操作的PE数目。 多处理机执行并发任务,需用处理机的数目不 固定,各处理机进出任务的时刻不相同,所 需共享资源的品种、数量随时变化。 资源分配和进程调度问题,对整个系统的效率 有很大的影响。
CPU0 LM0 IOP0
CPU1 LM1 IOP1 互连网络
…
CPUn-1 LMn-1 IOPn-1
通过输入输出接口连接的多处理机
CPU0
LM0
IOP0 …CPUn-1 NhomakorabeaLMn-1
IOPn-1
CAS
模块 0
CAS
模块 n-1
互连网络 通过消息传送系统连接的松散偶合多处理机
9.1.3 紧密偶合多处理机