矩阵的最小多项式及其应用
矩阵的最小多项式和不变因子的关系
矩阵的最小多项式和不变因子的关系
首先,矩阵的最小多项式是一个最低次数的首项系数为1的多项式,使得它在矩阵上取值为0。
最小多项式可以看做是矩阵的“特征方程”,它告诉我们矩阵的特征值以及每个特征值的几何重数。
而矩阵的不变因子,则是一个多项式,使得它在矩阵上取值为0时,对应的线性变换不改变向量空间的维数。
不变因子是矩阵的“最大不变子空间”。
它们之间的关系是,矩阵的不变因子是最小多项式的所有因子中次数最高的那个。
也就是说,最小多项式的每一个因子都可以得到一个对应的不变子空间,而不变因子则是其中最高次的那一个。
此外,最小多项式和不变因子还有以下性质:
1. 最小多项式的次数等于矩阵的维度;
2. 不变因子的次数等于矩阵的“最大不变子空间”的维数;
3. 最小多项式和不变因子的根(即多项式的零点)都是矩阵的特征值;
4. 如果一个矩阵在一个域上的最小多项式和不变因子相同,则这个矩阵是可对角化的。
总之,最小多项式和不变因子是矩阵性质的重要指标,它们相互关联,互相影响,对于我们研究矩阵的特征值、对角化、相似变换等问题都具有深远的意义。
- 1 -。
极小多项式和友矩阵

极⼩多项式和友矩阵将学习到什么介绍了极⼩多项式和友矩阵的相关概念以及基础性质。
极⼩多项式多项式p(t) 称为使A∈M n零化,如果p(A)=0. 保证了:对每个A∈M n, 存在⼀个n次的⾸ 1 多项式p A(t)(特征多项式),使得p A(A)=0. 当然可能也存在⼀个更低次数的⾸ 1 多项式使A零化. 我们要找出使A零化的最低次数的⾸ 1 多项式. 下⾯这个定理表明这个要找的多项式是唯⼀的. 定理 1:设给定A∈M n. 则存在唯⼀⼀个最⼩次数的⾸ 1 多项式q A(t) 使A零化. q A(t) 的次数⾄多为n. 如果p(t) 是任何⼀个使p(A)=0 成⽴的⾸ 1 多项式,那么q A(t) 整除p(t), 即对某个⾸ 1 多项式h(t) 有p(t)=h(t)q A(t). 证明:次数不⼤于n没什么好说的,因为存在n次的⼀定满⾜. 如果p(t) 是任何⼀个使A零化的⾸ 1 多项式,⼜如果q(t) 是⼀个使A零化的m次(设为最低次)⾸ 1 多项式,那么p(t) 的次数是m或者更⾼. Euclid 算法确保存在⼀个⾸ 1 多项式h(t) 以及⼀个次数严格⼩于m的多项式r(t) 使得p(t)=q(t)h(t)+r(t). 但是 0=p(A)=q(A)h(A)+r(A)=0h(A)+r(A), 所以r(A)=0. 如果r(t)不是零多项式,我们就能将它规范化得到⼀个次数⼩于m的⾸ 1 零化多项式,这是⼀个⽭盾. 所以r(t) 是零多项式,从⽽q(t) 整除p(t), 商为h(t). 如果存在两个最⼩次数的使A零化的⾸ 1 多项式,这个论证表明它们每⼀个都整除另外⼀个,由于它们次数相同,其中⼀个必定是另⼀个的纯量倍数. 但由于两者都是⾸ 1 的,纯量因⼦必为 +1, 从⽽它们是相等的. 定义 1:设给定A∈M n. 使A零化的唯⼀的最⼩次数⾸ 1 多项式q A(t) 称为A的极⼩多项式. 推论 1:相似矩阵有相同的极⼩多项式 证明:如果A,B,S∈M n, 且A=SBS−1, 那么q B(A)=q B(SBS−1)=Sq B(B)S−1=0, 所以q B(t) 是⼀个使A零化的⾸ 1 多项式,从⽽q A(t) 的次数⼩于或等于q B(t) 的次数. 但是B=S−1AS,所以相同的推理表明q B(t) 的次数⼩于或等于q A(t) 的次数. 从⽽q A(t) 与q B(t) 都是使A零化的最⼩次数的⾸ 1 多项式,故⽽由定理 1 知它们是相等的.需要注意的是,矩阵A与B有相同的极⼩多项式,不代表它们⼀定相似,⽐如A=J2(0)⊕J2(0)∈M4与B=J2(0)⊕02(0)∈M4. 推论 2:对每⼀个A∈M n, 极⼩多项式q A(t) 整除特征多项式p A(t). 此外,q A(λ)=0 当且仅当λ是A的特征值,故⽽p A(t)=0 的每个根都是q A(t) 的根. 证明:由于p A(A)=0, 则存在⼀个多项式h(t) 使得p A(t)=h(t)q A(t). 这个分解式使得q A(t)=0 的每个根都是p A(t)=0 的你根这⼀事实变得显然,从⽽q A(t)=0 的每个根都是A的特征值. 如果λ是A的⼀个特征值,⼜如果x是与之相伴的特征向量,那么Ax=λx, 且 0=q A(A)x=q A(λ)x, 所以q A(λ)=0.上⾯这个推论表明,如果特征多项式p A(t) 被完全分解成\begin{align} \label{e1}p_A(t)=\prod_{j=1}d(t-\lambda_i){s_i},\quad 1 \leqslant s_i \leqslant n, \quad s_1+s_2+\cdots+s_d =n\end{align}其中λ1,λ2,⋯,λd各不相同,那么极⼩多项式q A(t) 必定有形式\begin{align} \label{e2}q_A(t)=\prod_{i=1}d(t-\lambda_i){r_i}, 1\leqslant r_i \leqslant s_i\end{align}这就从理论上对寻求给定矩阵A的极⼩多项式给出⼀个算法: 1. ⾸先计算A的特征值,包括它们的重数,这或许通过求出特征多项式并将其完全分解即可得到. ⽤某种⽅法确定分解式. 2. 存在有限多个形如的多项式. 从所有r i=1 的乘积出发,⽤显⽰计算来确定使A零化的最⼩次数的乘积,这就是极⼩多项式.从数值计算上来说,对于⼤矩阵计算过于复杂,但在处理简单的⼩矩阵的徒⼿计算时还是⾮常有效的.在A∈M n的标准型与A的极⼩多项式之间存在密切的联系. 假设A=SJS−1是A的 Jordan 标准型,⼜⾸先假设J=J n(λ) 是单独⼀个 Jordan 块. A的特征多项式是 (t−λ)n, 由于当k<n时有 (J−λI)k≠0, 所以J的极⼩多项式仍然是 (t−λ)n. 然⽽,如果J=J n1(λ)⊕J n2(λ)∈M n(其中n1⩾), 则J的特征多项式仍然是(t-\lambda)^n, 但现在有(J-\lambda I)^{n_1}=0, 且没有更低次的幂变为零. 这样⼀来,J的极⼩多项式是(t-\lambda)^{n_1}. 如果对特征值\lambda有多个 Jordan 块,则有相同结论:J的极⼩多项式是(t-\lambda)^r, 其中r是与\lambda对应的最⼤ Jordan 块的阶. 如果J是⼀般的 Jordan 矩阵,其极⼩多项式必定包含因⼦(t-\lambda_i)^{r_i}(对每⼀个不同的特征值\lambda_i);⽽r_i必定是与\lambda_i对应的最⼤ Jordan 块的阶;没有更低的幂能零化与\lambda_i对应的所有 Jordan 块,⽽且也不需要更⾼的幂. 由于相似矩阵有相同的极⼩多项式,我们就证明了下⾯的定理. 定理 2:设A \in M_n是⼀个给定的矩阵,其不同的特征值是\lambda_1\cdots \lambda_d. 则A的极⼩多项式是\begin{align} \label{e3}q_A(t)=\prod_{i=1}d(t-\lambda_i){r_i}\end{align}其中r_i是A的与特征值\lambda_i对应的最⼤ Jordan 块的阶.实际上,这个结果在计算极⼩多项式时没有太多的帮助,因为通常确定⼀个矩阵的 Jordan 标准型⽐确定它的极⼩多项式更为困难.的确,如果仅仅知道矩阵的特征值,它的极⼩多项式就可以通过简单的试错法确定. 然⽽,这个结果有⼀些有重要理论价值的推论.由于⼀个矩阵可对⾓化当且仅当它所有 Jordan 块的阶均为 1, 所以矩阵可对⾓化的⼀个充分必要条件就是式\ref{e3}中所有的r_i=1. 推论 3:设A \in M_n有不同的特征值\lambda_1\cdots \lambda_d. ⼜令\begin{align} \label{e4} q(t)=(t-\lambda_1)(t-\lambda_2)\cdots (t-\lambda_d) \end{align}那么,A可对⾓化当且仅当q(A)=0这个判别法对于判断⼀个给定的矩阵是否可以对⾓化是有实际⽤途的,只要我们知道它不同的特征值:构造多项式\ref{e4}并观察它是否使A零化. 如果它使A零化,它必定就是A的极⼩多项式,这是因为没有更低次数的多项式能以A的所有不同特征值作为其零点了. 如果它不能使A零化,那么A不可对⾓化. 将此结果总结成若⼲等价的形式是有益的. 推论 4:设A \in M_n, ⽽q_A(t)是它的极⼩多项式,则以下诸结论等价: (a) q_A(t)是不同线性因⼦的乘积 (b) A的每⼀个特征值作为q_A(t)=0的根的重数都是 1 (c) 对A的每个特征值\lambda, 都有q'_A(\lambda) \neq 0 (d) A可以对⾓化友矩阵对给定的A\in M_n, 我们迄今正在考虑的是寻求使A零化的最⼩次数的⾸ 1 多项式. 但是对于其逆,我们能说什么呢?给定⼀个⾸1 多项式\begin{align}\label{e5}p(t)=t n+a_{n-1}t{n-1}+a_{n-2}t^{n-2}+\cdots+a_1t+a_0\end{align}是否存在⼀个矩阵A, 使得它以p(t)作为它的极⼩多项式呢?若如是,则A的⼤⼩必定⾄少是n \times n. 考虑\begin{align} \label{e6} A=\begin{bmatrix} 0 &&&& -a_0 \\ 1 & 0 &&& -a_1 \\ & 1 & \ddots && \vdots \\ && \ddots & 0 & -a_{n-2} \\ 0 &&& 1 & -a_{n-1}\end{bmatrix} \in M_n \end{align}并注意到\begin{align} & I e_1 &= \, &e_1 =\quad A^0e_1 \notag \\ & A e_1 &= \, &e_2 = \quad Ae_1 \notag\\ & A e_2 &= \, &e_3 =\quad A^2 e_1 \notag \\ & A e_3 &= \, &e_4 = \quad A^3 e_1 \notag \\ & \,\,\, \vdots & \notag \\ & A e_{n-1} &= \,& e_n =\quad A^{n-1}e_1 \notag \end{align}进⼀步有\begin{align}Ae_n &=-a_{n-1}e_n-a_{n-2}e_{n-1}-\cdots -a_1e_2-a_0e_1 \notag \\&=-a_{n-1}A{n-1}e_1-a_{n-2}A{n-2}e_1 -\cdots -a_1Ae_1-a_0 e_1 \notag \\&=(A^n-p(A))e_1\end{align}于是\begin{align}p(A)e_1 &=(a_0e_1+a_1Ae_1+a_2A^2e_1+\cdots +a_{n-1}A{n-1}e_1)+A ne_1 \notag \\&=(p(A)-A n)e_1+(A n-p(A))e_1 \notag \\&=0\end{align}此外,对每个k=1,2,\cdots,n有p(A)e_k=p(A)A^{k-1}e_1=A^{k-1}p(A)e_1=A^{k-1}0=0. 由于对每个基向量e_k有p(A)e_k=0,我们断定有p(A)=0. 从⽽p(t)是使A零化的n次⾸ 1 多项式. 如果存在⼀个更低次数m<n且使A零化的多项式q(t)=t^m+b_{m-1}t^{m-1}+\cdots+b_1t+b_0, 那么\begin{align}0&=q(A)e_1=A me_1+b_{m-1}A{m-1}e_1+\cdots+b_1Ae_1+b_0e_1 \notag \\&=e_{m+1}+b_{m-1}e_m+\cdots+b_1e_2+b_0e_1=0\end{align}⽽这是不可能的,因为e_1,\cdots,e_{m+1}是线性⽆关的. 我们断⾔:n次多项式p(t)是使A零化的最低次数的⾸ 1 多项式,所以它就是A的极⼩多项式. 特征多项式p_A(t)也是⼀个使A零化的n次⾸ 1 多项式,故⽽定理 1 确保p(t)也是矩阵\ref{e6}的特征多项式. 定义 2:矩阵\ref{e6}称为多项式\ref{e5}的友矩阵.我们已经证明了下⾯的结论: 定理 3:每⼀个⾸ 1 多项式既是它的友矩阵的极⼩多项式,⼜是它的友矩阵的特征多项式.如果A \in M_n的极⼩多项式的次数为n,那么\ref{e3}中的指数满⾜r_1+\cdots+r_d=n;也就是说,与每⼀个特征值对应的最⼤的 Jordan 块就是与每⼀个特征值对应的唯⼀的 Jordan 块. 这样的矩阵是⽆损的. 特别地,每⼀个友矩阵都是⽆损的. 当然,不⼀定每个⽆损的矩阵A\in M_n都是友矩阵,但是A与A的特征多项式的友矩阵C有同样的 Jordan 标准型(与每⼀个不同的特征值\lambda_i对应的只有⼀个分块J_{r_i}(\lambda_i)), 所以A与C相似. 定理 4:设A \in M_n有极⼩多项式q_A(t)以及特征多项式p_A(t). 则下⾯诸结论等价: (a) q_A(t)的次数为n (b) p_A(t)=q_A(t) (c) A是⽆损的 (d) A与p_A(t)的友矩阵相似应该知道什么极⼩多项式存在且唯⼀相似矩阵具有相同的极⼩多项式,反之不成⽴友矩阵是以事先给定多项式为极⼩多项式的矩阵Loading [MathJax]/jax/element/mml/optable/SuppMathOperators.js每⼀个⾸ 1 多项式既是它的友矩阵的极⼩多项式,⼜是它的友矩阵的特征多项式。
矩阵论最小多项式JORDAN式子.doc
λ-矩阵一、λ-矩阵的基本概念数域P 上m n ⨯的λ-矩阵的一般形式()()()()()()()1111n ij mnm mn a a A a a a λλλλλλ⎛⎫ ⎪== ⎪ ⎪⎝⎭ ,其中各()[]ij a P λλ∈.1 ()A λ的某行(列)不为零:该行(列)的元素不全为零多项式; 2()A λ的:该子式是一个非零多项式; 3 ()A λ的秩为r :()A λ有一个r 级子式不为零,而所有的1r +级子式(如果还有的话)全为零;4 n 级λ-矩阵()A λ可逆:存在n 级λ-矩阵()B λ使()()()()A B B A E λλλλ==,这时记()B λ为()1A λ-称为()A λ的逆矩阵。
()A λ可逆()A λ⇔=非零常数(即零次多项式). 5 ()A λ与()B λ等价:()A λ与()B λ可以经过初等变换互相转化。
()A λ与()B λ等价⇔存在可逆矩阵()(),P Q λλ使()()()()P A Q B λλλλ=.二、λ-矩阵的标准准形及三种因子1 每个λ-矩阵()A λ都可以经过初等变换(可以同时作行变换和列变换)化为标准形()()()()1200r d d B d λλλλ⎛⎫ ⎪ ⎪⎪= ⎪ ⎪⎪⎪ ⎪⎝⎭ , 其中()()()12,,,r d d d λλλ 均为首一多项式,称为()A λ的不变因子。
它们满足依次整除关系:()()1i i d d λλ+,1,2,,1i r =- .因为初等变换不改变()A λ的秩,所以上述()()r r A λ=.2()A λ的所有k 级子式的首一最大公因式()k D λ称为()A λ的k 级行列式因子。
(1)若()()r A rλ=,则()A λ的行列式因子恰有r 个:()()()12,,,r D D D λλλ .(2)初等变换不改变()A λ的各级行列式因子,所以()A λ与它的标准形()B λ有相同的行列式因子。
太原理工大学 高等代数第七章 9第九节 最小多项式
所以,矩阵J的最小多项式为 所以,矩阵 的最小多项式为(x-a)k.
返回
证毕. 证毕
上页 下页
定理15 数Biblioteka P上n级矩阵 与对角矩阵相似的 定理 数域 上 级矩阵A与对角矩阵相似的 级矩阵 相似 充分必要条件为 的最小多项式是 上 充分必要条件为A的最小多项式是P上互素的一次 因式的乘积. 因式的乘积 证明 根据引理 的推广的情形,条件的必要性 根据引理3的推广的情形,条件的必要性 引理 的情形 是显然的. 是显然的 现在证明充分性 现在证明充分性. 充分性 根据矩阵和线性变换之间的对应关系,我们 根据矩阵和线性变换之间的对应关系, 矩阵 之间的对应关系 可定义任意线性变换 的最小多项式, 可定义任意线性变换A的最小多项式,它等于其对 任意线性变换 应矩阵A的最小多项式. 应矩阵 的最小多项式
返回
上页
下页
如果矩阵A与 相似 即有B=T-1AT,那么对任 相似, 如果矩阵 与B相似,即有 , 一多项式f(x),就有f(B)=T-1f(A)T. 因此 ,就有 因此f(B)=0当且 一多项式 当 仅当f(A)=0. 仅当 相似矩阵有相同的最小多项式. 结论 相似矩阵有相同的最小多项式 注意,这个条件并不是充分的, 注意,这个条件并不是充分的,即最小多项 式相同的矩阵不一定是相似的 式相同的矩阵不一定是相似的. 下面的例子说明这 不一定是相似的 个结论. 个结论
返回
上页
下页
引理3 设A是一个准对角矩阵 引理 是一个准对角矩阵
A1 A= A2 并设A1的最小多项式为g1(x),A2的最小多项式为 并设 最小多项式为 , 最小多项式为
g2(x),那么 的最小多项式为g1(x), g2(x)的最小公倍 ,那么A的最小多项式为 的 式[g1(x), g2(x)]. 证明 记g(x)=[g1(x), g2(x)],首先 ,
矩阵最小多项式的性质及它的一种初等求法
() 似矩阵的最小多项式相 同 ; 4 相 ( ) 与 A 具 有 相 同 的最 小 多 项 式 ; 5A ( ) 厂( ) A 且 a厂( ) 0 则 f( 不 可 6 若 I () 。 > , A)
逆。 证 明 ( ) V A ∈ M C) 以 f ( )表 示 A 1 对 ( , A
的 特 征 多 项 式 , Ha l n Ca ly定 理 , A )一 由 mio — ye t f (
收 稿 日期 :0 20 一 o 2 0 — i3 . 作 者 简 介 : 金 泰 ( 9 4 )男 , 士 , 教 授 , 要 从 事 代 数 方 向 的 教 学 和 研 究 工 作 高 i 6一, 学 副 主
( )由 ( ) 接 推 出 。 3 2直
( )设 B — P AP, 任 意 正 整 数 , 一 4 对 B 具 有 以下 性 质 : ( ) ( ) 在并 且 唯 一 确 定 ; 1 A 存 ( ) () 除 A 的 任 一 零 化 多 项 式 ; 2 整
( A )l ( ); 3) ( fA
1
与数乘矩阵运算构 成的向量空 间 。
f ( )表 示 方 阵 A 的特 征 多 项 式 。 a ( )表 示 方 阵 A 的最 小 多 项 多 。 a r 。( )表 示 一 元 多项 式 r ( )的 次 数 。
。
的首项 系数 为 口≠ 0 则 ,
除法 得 :
V0l 2 0 _ 3 N .3 S p 2 e . 0 0 2
矩 阵最 小 多项 式 的 性 质 及 它 的 一 种 初 等 求 法
高 金 秦
( 水 师范 学 院 数学 系 , 肃 天水 71 0) 天 甘 4 0 0
摘 要 : 论 了矩 阵 最 小 多 项 式 的 几 条 性 质 , 利 用 线 性 相 关 的概 念 , 出 了 最 小 多项 式 的 一 讨 并 给 种初 等 求 法 , 方 法 与 其 他 方 法[ 相 比 更 为 简单 , 算 量 更 小 。 该 计
§7.9 最小多项式(1)
矩阵A的最小多项式是唯一的。
第七章 线性变换
性质2 设 g( x ) 是矩阵A的最小多项式,则 f ( x ) 以A为根 g( x ) f ( x ) 。 的充要条件是: 证明:充分性。 若 g( x ) f ( x ) , 则 ∃ q( x ), 使
f ( x ) = g( x )q( x ) 。
⎛0 ⎞ ⎜0 0 ⎟ ⎜ ⎟ ( J − λ E )2 = ⎜ 1 0 0 ⎟ ≠ 0, %%% ⎜ %%% ⎟ ⎜ 1 0 0⎟ ⎝ ⎠
⎛0 ⎞ ⎜1 0 ⎟ ⎜ ⎟ J − λE = ⎜ 1 0 ⎟ ≠ 0, %% ⎜ %% ⎟ ⎜ ⎟ 1 0 ⎝ ⎠
⎛0 ⎞ ⎜# % ⎟ k −1 ≠0。 "" , ( J − λ E ) = ⎜ 0 % ⎟ ⎜ 1 0 " 0⎟ ⎝ ⎠ k f ( x ) = ( x − λ ) 。 , k ) 的最小多项式为 : 故 J (λ线性变换 第七章
故 g(σ ) = θ , 因此 g(σ )V = {0},
第七章 线性变换
由定理7.7 .2的结论可知
V = V1 ⊕ V2 ⊕ " ⊕ Vs
其中 某个 Vi ,
Vi = {ξ (σ − λi ε )ξ = 0, ξ ∈ V }, i = 1," , s 。
把 V1 ," ,Vs 各自的基合起来组成V的基,每个基向量都属于 因而是 σ 的特征向量。 σ 在这个基下的矩阵就是对 角矩阵,故A与对角矩阵相似。
n ⎛ A An = ⎜ 1 ⎝ 0
0 ⎞ ⎛ kA1 , n ≥ 1, kA = ⎜ n⎟ A2 ⎠ ⎝ 0 0 ⎞ ⎛ g ( A1 ) ∴ g ( A) = ⎜ ⎟=0 g( A2 ) ⎠ ⎝ 0
矩阵理论-第四讲 最小多项式
0
= ϕ ( A)
信息科学与工程学院
矩阵理论第4讲 - 13
Hamilton-Cayley定理的应用 – 化简矩阵多项式的计算:
• 当n阶方阵的矩阵多项式 f ( A) 中A的最高次幂超过n时,可用多项 式的带余除法,将此矩阵多项对应的多项式 f (λ ) 表示为 ϕ (λ ) =
那么根据Hamilton-Cayley定理
•
任一方阵都是它的特征多项式的根
– 证明:
n ∃P ∈ Cn ×n
P −1 AP = J
考察J:
λ1 1 λ1 O O 1 λ1 0 λ2 1 O 1 λ2 0 O O O 1 λi
Dr×1 ∈ F m×( n +1) ~ D( m −r )×1
矩阵理论第4讲 - 2
信息科学与工程学院
Hamilton-Cayley定理
•
任一方阵都是它的特征多项式的根
– Hamilton-Cayley定理 设 A∈ C nxn ,ϕ (λ ) = det(λI − A) ,则 ϕ ( A) = 0 – 证明: 由于
利用矩阵加法的定义 A + B ∆ ( aij + bij ) 将 B(λ ) 分解
信息科学与工程学院
矩阵理论第4讲 - 11
Hamilton-Cayley定理
B(λ ) = λn −1 Bn −1 + λn − 2 Bn −1 + L + B0 Bi ∈ C n×n (i = 1,L n − 1) 考察等式 B(λ )(λI − A) = det(λI − A) I 的右边:
其中: f ij* (λ ) 是 A(λ ) 的行列式的第i行第j列元素的代数余子式, 那么与常数矩阵类似:
矩阵最小多项式的应用
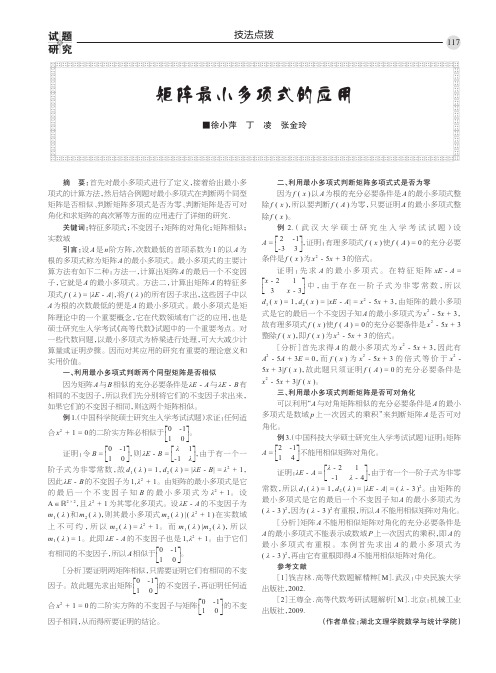
证明:有理多项式 f ( x ) 使 f ( A ) = 0 的充分必要
ë-3 3 û
条件是 f ( x ) 为 x 2 - 5x + 3 的倍式。
证 明 :先 求 A 的 最 小 多 项 式 。 在 特 征 矩 阵 xE - A =
1 ù
éêx - 2
ú 中 ,由 于 存 在 一 阶 子 式 为 非 零 常 数 ,所 以
二、利用最小多项式判断矩阵多项式式是否为零
因为 f ( x ) 以 A 为根的充分必要条件是 A 的最小多项式整
矩阵是否相似、判断矩阵多项式是否为零、判断矩阵是否可对
除 f ( x ),所以要判断 f ( A ) 为零,只要证明 A 的最小多项式整
角化和求矩阵的高次幂等方面的应用进行了详细的研究 .
2
因此 λE - B 的不变因子为 1, λ2 + 1。由矩阵的最小多项式是它
的 最 后 一 个 不 变 因 子 知 B 的 最 小 多 项 式 为 λ 2 + 1。 设
A ∈ ℝ 2 × 2,且 λ2 + 1 为其零化多项式。设 λE - A 的不变因子为
m 1 ( λ ) 和 m 2 ( λ ),则其最小多项式 m 2 ( λ ) |( λ2 + 1 ) 在实数域
上 不 可 约 ,所 以 m 2 ( λ ) = λ2 + 1。 而 m 1 ( λ ) |m 2 ( λ ),所 以
m 1 ( λ ) = 1。此即 λE - A 的不变因子也是 1, λ2 + 1。由于它们
0 -1 ù
ú。
有相同的不变因子,所以 A 相似于 éê
ë1 0 û
[分析]要证明两矩阵相似,只需要证明它们有相同的不变
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abstract
Based on the theory of minimum polynomials, this paper introduces the method of finding the minimum polynomials with characteristic polynomials, and sums up the application of minimum polynomials in simplifying arbitrary matrix polynomials, finding dimensions and bases of linear spaces, solving matrix equations, and diagonalizing judgment matrices.
1 1 0 0 1 0 1 0 1 A =− 1 −1 1 , B = 0 0 1 , C = 0 0 0 , 1 0 1 −2 −2 0 −1 −2 −1
求解矩阵方程 AX − XB = C。 解:矩阵 A, B 的最小多项式分别为
R (T ) ,任取 α , β ,x1 , x2 ∈ D (T ) ,若 α x1 + β x2 ∈ D (T ) , T (α x1 + β x2 ) = α Tx1 + β Tx2 ,那么称 T 是以 D (T )
为定义域的 X 到 Y 的线性算子。
= AX , 、 定理 2.2 [5]: 设 A, B, X ∈ F n×n , 若A BX = BX 。 B 是 A, B 在 F n×n 到 F n×n 的线性算子则有 AX 定理 2.3 [5] :由 mA C 等价。 C 与方程 A − B X = = m = mB ( λ ) 可知,方程 AX − XB = (λ ) A ( λ ) mB ( λ ) − B 可逆的充要条件是 定理 2.4 [5]: A ( mA ( λ ) , mB ( λ ) ) = 1 ,
2. 利用特征多项式求最小多项式
定义 1.1 [1]:设 A ∈ F n×n ,行列式 f A ( λ ) = λ E − A = a0 + a1λ + + an−1λ n−1 + λ n , 称为矩阵 A 的特征多项式. 定理 1.1 [2]:如果 n 阶矩阵 A 的特征多项式能够分解表示成不同一次因式方幂的乘积
2) E , A, A2 , , Ak −1 为 W 的一组。
DOI: 10.12677/aam.2018.711159
1371
应用数学进展
王菲,王合玲
1 0 0 −1 + 3i 例题 2.2:矩阵 A = ,W 0 w 0 ,其中 w = = 2 2 0 0 w 特征多项式,求 W 的维数及其一组基。
f A ( λ ) = λ E − A = ( λ − 1)( λ − 2 ) ,
2
由定理 1.1 可知,矩阵 A 的最小多项式可能为:
m1 ( λ ) = ( λ − 1)( λ − 2 ) , ( λ − 1)( λ − 2 ) , m2 ( λ ) =
2
因为
m1 ( A ) = O, ( A − E )( A − 2 E ) =
f ( λ ) 的次数,再将矩阵 A 带入求解,使运算达到了简化的目的。
利用最小多项式化简任意矩阵多项式的步骤如下: 步骤 1:先求出矩阵 A 的最小多项式 mA ( λ ) . ,即 f ( λ ) q ( λ ) mA ( λ ) + r ( λ ) 。 步骤 2:用 mA ( λ ) 除 f ( λ ) ,得商式 q ( λ ) 和余式 r ( λ ) =
f A (λ ) = ( λ − λ1 ) 1 ( λ − λ2 ) 2 ( λ − λs ) s ,
n n n
其中 λi 是 A 的相异的特征值, ni 是特征值 λi 的重数,且 n1 + n2 + + ns = n ,则 A 的最小多项式具有如下 形式
mA ( λ ) = 1, 2, , s ) . ( λ − λ1 ) 1 ( λ − λ2 ) 2 ( λ − λs ) s , 其中 di ≤ ni ( i =
(
)
(
)
(
)
−1 −1 −1 1 1 0 , u ( B) = − B + B +1 = 0 1 1
(
2
)
将 = α1 2, = α 2 0, = α 3 1 ,代入
关键词
矩阵,最小多项式,特征多项式
文章引用: 王菲, 王合玲. 矩阵的最小多项式及其应用[J]. 应用数学进展, 2018, 7(11): 1369-1373. DOI: 10.12677/aam.2018.711159
王菲,王合玲
Copyright © 2018 by authors and Hans Publishers Inc. This work is licensed under the Creative Commons Attribution International License (CC BY). /licenses/by/4.0/
Op代数类问题,例如求出矩阵函数的解、求出矩阵函数的逆、解微分方程组,尤其是在求 解常系数线性微分方程组初值问题的过程当中,运用矩阵最小多项式能达到简化运算和快速计算标准矩 阵的目的。最小多项式同时也是多项式理论中的重要内容,它在矩阵对角化的判断、矩阵是否相似以及 在线性变换结构中的研究都有相应的运用。最小多项式除了在矩阵理论方面有所应用,在线性控制系统 等其他领域的应用十分也广泛。
DOI: 10.12677/aam.2018.711159 1372 应用数学进展
王菲,王合玲
mA ( λ= ) λ 3 + 2λ , mB ( λ ) = λ 3 + λ 2 + 2λ + 1 ,
由于
mA ( λ ) −λ 2 − λ − 1 + mB ( λ ) λ 2 + 1 = 1,
取 u ( λ ) = − λ 2 + λ + 1 ,从而
Advances in Applied Mathematics 应用数学进展, 2018, 7(11), 1369-1373 Published Online November 2018 in Hans. /journal/aam https:///10.12677/aam.2018.711159
Keywords
Matrix, Minimum Polynomial, Characteristic Polynomial
矩阵的最小多项式及其应用
王 菲,王合玲
新疆财经大学,新疆 乌鲁木齐
收稿日期:2018年10月28日;录用日期:2018年11月7日;发布日期:2018年11月14日
摘
要
基于最小多项式的理论,介绍了用特征多项式求最小多项式的方法,归纳了最小多项式在简化任意矩阵 多项式、求线性空间的维数和基、解矩阵方程,以及判断矩阵对角化这四方面的应用。
且 f ( A ) q ( A ) m ( A ) + r ( A ) , 可得 f ( A ) = r ( A ) . 步骤 3:由 m ( A ) = O = 2 0 0 6 5 4 2 例题 2.1:已知 A = 1 1 1 , f ( λ ) = λ + 2λ − λ + 3λ − 2λ + 1 ,求 f ( A ) . 1 −1 3 解:矩阵 A 的特征多项式为
因此矩阵 A 的最小多项式为
mA ( λ= )
设
( λ − 2)
2
,
= f ( λ ) q ( λ ) mA ( λ ) + r ( λ ) ,
且通过计算可得
r= ( λ ) 330λ − 539,
因此
0 0 121 f ( A ) = r ( A ) = 330 A − 539 E = 330 −209 330 。 330 −330 451
mA ( λ ) = f A (λ ) = ( λ − 1)( λ − w ) λ − w2 ,
由于
(
)
dim (W ) = 3, ∂ ( mA ( λ ) ) =
因此 E , A, A2 是矩阵 A 的全体多项式生成的线性空间 W 的一组基。
3.3. 求解矩阵方程
对于矩阵方程 AX − XB = C 的求解方法,通过矩阵的最小多项式来求得矩阵方程 AX − XB = C 的解, 使方程的结果更加简洁。 定义 2.1 [4]:设两个线性空间 X 、 Y , T 是 X 到 Y 的映射, T 的定义域和值域分别记录为 D (T ) 和
所以 A 的最小多项式为
mA ( λ ) = ( λ − 1)( λ − 2 ) .
DOI: 10.12677/aam.2018.711159 1370 应用数学进展
王菲,王合玲
3. 最小多项式的应用
3.1. 化简任意矩阵多项式
求解矩阵函数时,如果多项式次数较高,直接计算 f ( A ) 会比较繁琐,而利用最小多项式可以降低
3.2. 求线性空间的维数和一组基
在代数中一般通过线性空间的极大无关组表示线性空间的基,计算比较繁琐,利用最小多项式求线 性空间的维数和一组基,可以使过程更加简便。 定理 2.1 [3]:设 A ∈ F n×n 的全体多项式形成的线性空间是 W ,并且 mA ( λ ) 是 A 的最小多项式,则有
∂ ( mA ( λ ) ) = k; 1) W 的维数等于 mA ( λ ) 的次数 k ,即 dim (W ) =
(
)
且