【空客入门课件】自动飞行制导模式A
合集下载
【飞机系统PPT课件】自动飞行FCU:飞行控制组件
MENU
高度的选择是通过旋转高度选择旋钮完成的。 转动高度选择旋钮,窗口中的设定值就改变。
MENU
该旋钮实际上是两个不同的选择器。 内圈用于设置窗口中的高度,外圈用于改变 高度变化量。 高度的增/减量可以有两个值:100英尺或 1000英尺。
MENU
现在准备起飞… 单击前进箭头开始起飞滑跑。
MENU
FCU显示窗中的HDG-V/S或TRK-FPA字样明确地 指示出了当前的选择。
请将航向-垂直速度方式改为航迹-飞行航迹角方式。
MENU
航向-垂直速度/航迹-飞行航迹角(HDG-V/S/TRKFPA)按钮用来切换航向-垂直速度方式和航迹-飞行 航迹角方式。
FCU显示窗中的HDG-V/S或TRK-FPA字样明确地 指示出了当前的选择。
转动 : 改变高度 压入 : 恢复垂直剖面 拉出 : 忽略垂直剖面
MENU
在EIS一章中我们已经学习了公制高度按钮。 在此我们提醒你,该按钮按入后,在ECAM系 统显示页面上的固定数据区将以米为单位显示 选择的高度。
MENU
我们现在来看一下垂直速度-飞行航迹角部分。
垂直速度-飞行航迹角选择旋钮有三个功能: 转动旋钮,用来改变垂直速度或飞行航迹角, 按入旋钮,使飞机立即改平, 拉出旋钮,选择垂直速度或飞行航迹角方式。
请拉出垂直速度-飞行航迹角选择旋钮。
MENU
为了设置一个值,首先拉出垂直速度-飞行航迹 角选择旋钮。
不对,请单击垂直速度-飞行航迹角选择旋钮。
为了设置一个值,首先拉出垂直速度-飞行航迹 角选择旋钮。
不对,请单击垂直速度-飞行航迹角选择旋钮。
一旦垂直速度-飞行航迹角选择旋钮被拉出,垂直 速度-飞行航迹角窗口就显示当前的垂直速度或飞行 航迹角。
高度的选择是通过旋转高度选择旋钮完成的。 转动高度选择旋钮,窗口中的设定值就改变。
MENU
该旋钮实际上是两个不同的选择器。 内圈用于设置窗口中的高度,外圈用于改变 高度变化量。 高度的增/减量可以有两个值:100英尺或 1000英尺。
MENU
现在准备起飞… 单击前进箭头开始起飞滑跑。
MENU
FCU显示窗中的HDG-V/S或TRK-FPA字样明确地 指示出了当前的选择。
请将航向-垂直速度方式改为航迹-飞行航迹角方式。
MENU
航向-垂直速度/航迹-飞行航迹角(HDG-V/S/TRKFPA)按钮用来切换航向-垂直速度方式和航迹-飞行 航迹角方式。
FCU显示窗中的HDG-V/S或TRK-FPA字样明确地 指示出了当前的选择。
转动 : 改变高度 压入 : 恢复垂直剖面 拉出 : 忽略垂直剖面
MENU
在EIS一章中我们已经学习了公制高度按钮。 在此我们提醒你,该按钮按入后,在ECAM系 统显示页面上的固定数据区将以米为单位显示 选择的高度。
MENU
我们现在来看一下垂直速度-飞行航迹角部分。
垂直速度-飞行航迹角选择旋钮有三个功能: 转动旋钮,用来改变垂直速度或飞行航迹角, 按入旋钮,使飞机立即改平, 拉出旋钮,选择垂直速度或飞行航迹角方式。
请拉出垂直速度-飞行航迹角选择旋钮。
MENU
为了设置一个值,首先拉出垂直速度-飞行航迹 角选择旋钮。
不对,请单击垂直速度-飞行航迹角选择旋钮。
为了设置一个值,首先拉出垂直速度-飞行航迹 角选择旋钮。
不对,请单击垂直速度-飞行航迹角选择旋钮。
一旦垂直速度-飞行航迹角选择旋钮被拉出,垂直 速度-飞行航迹角窗口就显示当前的垂直速度或飞行 航迹角。
自动飞行控制系统PPT课件
远前方的大。若迎面气流速度逐渐增大,则翼面上流速的最大值也会增大,该处的温度则要降低,因而音
速也降低。当迎面气流的速度达到某一值时,翼面上最大速度处的流速等于当地音速,此时我们把远前方的
迎面气流速度 与远前方的空气音速
M
之
cr
比 ,定义为该机的临界马赫数
。
a
18
V
第18页/共92页
Mcr
第二节 空气动力学的基本知识
路;其作用是稳定与控制飞机姿态。 • 控制(制导)回路:由稳定回路加上飞机轨迹反馈元件、放大计算装置组成飞机轨迹自动驾驶仪,并与飞
机形成的回路;其作用是稳定与控制飞机轨迹。
8
第8页/共92页
第一章 飞行原理
• 飞机控制系统的核心问题是研究由控制系统和飞行器组成的闭合回路的静、动态性能,为此必须建立控制 系统和飞行器的数学模型,其形式可以是微分方程、传递函数或状态空间表达式等。
4
第4页/共92页
第一节 飞行器的自动飞行
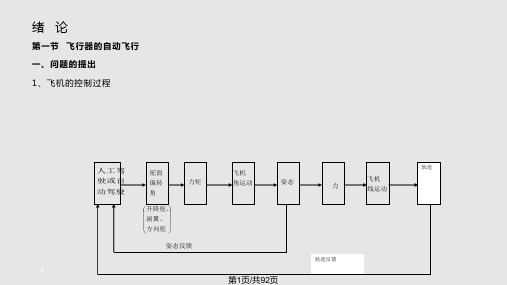
二、控制面 1、控制飞行器的目的是改变飞行器的姿态或空间位置,并在受干扰情况下保持飞行器的
姿态或位置。因而必须对飞行器施加力和(或)力矩,飞行器则按牛顿力学定律产生运动。 2、作用于飞行器而与控制有关的力和力矩主要是偏转控制面(即操纵面)产生的空气动
力和力矩。一般飞机有三个控制面:升降舵、方向舵和副翼。 3、由于航空技术的发展,仅靠改善飞机的气动布局和发动机的性能难以达到对飞机性能
V a
19
Vmax a
第19页/共92页
第二节 空气动力学的基本知识
• 飞机飞行速度的范围划分如下:
• 飞行马赫数 为飞行速度与远前方空气音速之比,
时为低速飞行;
为亚音速飞行;
【空客A320培训PPT课件】自动飞行概述

MENU 系统概述
6/25
MCDU 1
Flight Control Unit
MCDU 2
导航信息 性能信息 ADIRS & GPS 时钟
无线电导航
自动飞行
FMGCs
FMGC 向 下 列 系 统 提 供 输 出 信息:
自动驾驶系统——用于俯仰 ,横滚和偏航控制
自动推力系统——用于推力 控制
EFIS(电子飞行仪表装置
MENU 系统概述
3/25
A320系列飞机自动飞行系统的计算和处理 功能由两台飞行管理制导计算机(FMGC)完 成。
这两台计算机是相同的,在正常情况下一起 工作。出于训练目的,我们将把这两部FMGC 作为一个整体集中讨论。
FMGC1 COMFPMUGTACTsIONFMGC2 &
PROCESSING
无线电导航信息。
FMGCs
MENU 系统概述
5/25
MCDU 1
Flight Control Unit INPUT DEVICES
MCDU 2
导航信息 性能信息 ADIRS & GPS 时钟
无线电导航
自动飞行
FMGCs
飞行员通过使用以下组件向FMGC输入 信息:
两个多功能控制和显示组件(MCDU) , 一个单一的飞行控制组件(FCU)。
AP2
FD2
MENU 系统概述
17/25
MCDU 1
Flight Control Unit
MCDU 2
FMGC1
FD1
AP1
自动飞行
FMGC2
AP2
FD2
MENU 系统概述
18/25
MCDU 1
第一章自动飞行控制系统概述ppt课件

数字式AFCS和计算机技术的高速发展为电传飞行控制(FBW)创 造了条件。
事实上,波音737飞机上AFCS的驾驶盘操纵(CWS)方式也是一种 电传操纵。
电传操纵又是以主动增稳控制技术发展起来的。如果不从余度和 备份手段方面去考虑,当今的自动飞行控制系统、电传操纵或电 传飞行控制系统之间很难找出明确的界限。
在日常生活中,随处都可以看到浪费 粮食的 现象。 也许你 并未意 识到自 己在浪 费,也 许你认 为浪费 这一点 点算不 了什么
1.1.2 从自动驾驶仪到自动飞行控制系统
自动飞行控制系统是在20世纪60年代中逐步发展起来的,70年 代是模拟式AFCS盛行的时代,80年代开始了AFCS从模拟式向数 字式过渡。
1.1
自动飞行控制系统的发展 在日常生活中,随处都可以看到浪费粮食的现象。也许你并未意识到自己在浪费,也许你认为浪费这一点点算不了什么
1.1.2 从自动驾驶仪到自动飞行控制系统
20世纪60年代以前的自动驾驶仪均以舵机回路(舵机是指在自动驾驶仪中 操纵飞机舵面(操纵面)转动的一种执行部件)的稳定系统为主,配合较 少的输入指令(如转弯、升降、高度保持等)去操纵飞机。
随着计算机技术和信息综合化技术的发展,数字式的AFCS开始 和飞行管理计算机系统(FMCS)结合工作。在飞行管理计算机 统一管理下的自动飞行控制系统和自动油门配合,实现对飞机 的自动控制和对发动机推力的自动控制。
1.1.2 从自动驾驶仪到自动飞行控制系统 在日常生活中,随处都可以看到浪费粮食的现象。也许你并未意识到自己在浪费,也许你认为浪费这一点点算不了什么
为了防止电磁干扰传输电缆,FBW(电传飞行控制)采用双绞线 和屏蔽接地等技术,但尚不能完全抑制意外的电磁和电击干扰, 在此问题上光传输具有极好的防护性能。用于光传输的辅助操纵 系统和发动机控制系统都已研制成功并投入实践应用。
事实上,波音737飞机上AFCS的驾驶盘操纵(CWS)方式也是一种 电传操纵。
电传操纵又是以主动增稳控制技术发展起来的。如果不从余度和 备份手段方面去考虑,当今的自动飞行控制系统、电传操纵或电 传飞行控制系统之间很难找出明确的界限。
在日常生活中,随处都可以看到浪费 粮食的 现象。 也许你 并未意 识到自 己在浪 费,也 许你认 为浪费 这一点 点算不 了什么
1.1.2 从自动驾驶仪到自动飞行控制系统
自动飞行控制系统是在20世纪60年代中逐步发展起来的,70年 代是模拟式AFCS盛行的时代,80年代开始了AFCS从模拟式向数 字式过渡。
1.1
自动飞行控制系统的发展 在日常生活中,随处都可以看到浪费粮食的现象。也许你并未意识到自己在浪费,也许你认为浪费这一点点算不了什么
1.1.2 从自动驾驶仪到自动飞行控制系统
20世纪60年代以前的自动驾驶仪均以舵机回路(舵机是指在自动驾驶仪中 操纵飞机舵面(操纵面)转动的一种执行部件)的稳定系统为主,配合较 少的输入指令(如转弯、升降、高度保持等)去操纵飞机。
随着计算机技术和信息综合化技术的发展,数字式的AFCS开始 和飞行管理计算机系统(FMCS)结合工作。在飞行管理计算机 统一管理下的自动飞行控制系统和自动油门配合,实现对飞机 的自动控制和对发动机推力的自动控制。
1.1.2 从自动驾驶仪到自动飞行控制系统 在日常生活中,随处都可以看到浪费粮食的现象。也许你并未意识到自己在浪费,也许你认为浪费这一点点算不了什么
为了防止电磁干扰传输电缆,FBW(电传飞行控制)采用双绞线 和屏蔽接地等技术,但尚不能完全抑制意外的电磁和电击干扰, 在此问题上光传输具有极好的防护性能。用于光传输的辅助操纵 系统和发动机控制系统都已研制成功并投入实践应用。
《自动飞行控制系统》说课PPT

Title in here
飞行的稳定性与安全性的要求
主要内容
1 课程性质与目标
12
课程设计
3 教学内容与方法
4
教学对象分析
5
教学条件
6
课程改革
一、课程性质与目标
1、课程性质
A B C
D
课程类型 课程编码
课程设置及教学计划进程表
教学时数
学期/教学周数/周学时数
考核方式
课程名称
一
二
三
四
五
六
总学 课堂 课内实
方式控制板 自动油门系统 自动着陆系统:原理和分类、操作方式、进近、下滑道、着陆、复飞、系统检测和
故障状况
ME-TA AV 等级 等级
1
—
—
3
—
3
—
3
—
3
—
3
—
3
—
3
—
3
—
3
内容处理:
在原教学内容基础上增加第 一章内容“自动控制理论基 础”。
第二章内容为回顾先修课程 《空气动力学基础与飞行原 理》的知识点,不做详细讲 解。
11.4.10
M11. 涡轮发动机飞机的结构和系统 内容
自动飞行(ATA22) 自动飞行系统布局和基础理论(系统布局、工作原理和相关术语)
自动驾驶:指令信号的处理 工作方式:横滚、俯仰和偏航
飞行指引系统 偏航阻尼器的作用与原理
直升机自动增稳系统 自动配平:马赫配平、自动驾驶仪配平、速度配平、迎角配平等
教材
1.高职高专教材和行业培训 教材合理搭配,适应本专业 人才培养需要; 2.积极与企业合作开发符合 民航机务维修培训标准的高 职高专教材。
飞行的稳定性与安全性的要求
主要内容
1 课程性质与目标
12
课程设计
3 教学内容与方法
4
教学对象分析
5
教学条件
6
课程改革
一、课程性质与目标
1、课程性质
A B C
D
课程类型 课程编码
课程设置及教学计划进程表
教学时数
学期/教学周数/周学时数
考核方式
课程名称
一
二
三
四
五
六
总学 课堂 课内实
方式控制板 自动油门系统 自动着陆系统:原理和分类、操作方式、进近、下滑道、着陆、复飞、系统检测和
故障状况
ME-TA AV 等级 等级
1
—
—
3
—
3
—
3
—
3
—
3
—
3
—
3
—
3
—
3
内容处理:
在原教学内容基础上增加第 一章内容“自动控制理论基 础”。
第二章内容为回顾先修课程 《空气动力学基础与飞行原 理》的知识点,不做详细讲 解。
11.4.10
M11. 涡轮发动机飞机的结构和系统 内容
自动飞行(ATA22) 自动飞行系统布局和基础理论(系统布局、工作原理和相关术语)
自动驾驶:指令信号的处理 工作方式:横滚、俯仰和偏航
飞行指引系统 偏航阻尼器的作用与原理
直升机自动增稳系统 自动配平:马赫配平、自动驾驶仪配平、速度配平、迎角配平等
教材
1.高职高专教材和行业培训 教材合理搭配,适应本专业 人才培养需要; 2.积极与企业合作开发符合 民航机务维修培训标准的高 职高专教材。
【空客A320培训PPT课件】自动飞行非正常操作

相同。
请将机长ND的距离圈选择到80。
自动飞行
MENU 非正常操作
8/59
“单一方式”的结果是,只要1号ND的距离圈和方式与2号ND的设
置不同,在1号ND上就会显示“SET OFFSIDE RNG/MODE”(设置
异侧的距离/方式)和“MAP NOT AVAIL”(地图方式不可用)的信息
。
这里,为了显示导航地图,机长ND的距离圈必须与副驾驶的设置相
同。
不对,将机长ND的距离圈选择到80。
自动飞行
MENU 非正常操作
9/59
“单一方式”的结果是,只要1号ND的距离圈和方式与2号ND的设
置不同,在1号ND上就会显示“SET OFFSIDE RNG/MODE”(设置
异侧的距离/方式)和“MAP NOT AVAIL”(地图方式不可用)的信息
。
这里,为了显示导航地图,机长ND的距离圈必须与副驾驶的设置相
FMGC 2
自动飞行
MENU 非正常操作
3/59
FMGC 1
在独立方式中,每部FMGC 驱动各自的飞行制导(自动驾 驶仪/飞行指引仪), EFIS( PFD/ND),和MCDU。
机组必须在每个MCDU上输 入相同的数据以便使两部自动 驾驶仪/飞行指引仪获得相同的 制导指令,并且在两边的EFIS 和MCDU上显示相同的信息。
当交流恢复时,FMGC自动 恢复到“双重方式”。
FMGC 2
自动飞行
MENU 非正常操作
4/59
FMGC 1
我们来看一下一部FMGC失 效的情况,例如1号FMGC。
如果1号自动驾驶仪接通, ECAM上会触发“AUTO FLT AP OFF”(自动飞行自动驾驶 仪断开)的警告,
【空客A320培训PPT课件】自动飞行制导模式a

自动飞行
MENU 制导模式 (A)
3/54
在起飞前滑行时,注意在FMA上: CLB(爬升)方式以青蓝色显示表示待命;起飞阶段结束 后它将自动接通。
NAV(导航)方式以青蓝色显示表示待命;飞机离地后它 将自动接通。
1FD2表示两部飞行指引仪都接通(尽管由于在地面没有任 何方式接通,FD符号不显示)。
自动飞行
MENU 制导模式 (A)
6/54
PF:性能页面
FD的横向方式为RWY(跑道);FD垂直指令杆指令 偏航/横滚角度,它将使你在滑跑和初始爬升期间跟踪起 飞跑道航道信标。
如果在起飞时没有盲降系统可用,该区域显示空白。 注意:
1、在地面滑跑期间,FD垂直指令杆由偏航指令杆代 替,以便在低能见条件下帮助你滑跑。
在 FMA 上 , HDG( 航 向 ) 表 示 横 向导航现在由FCU航向选择器上所作 的选择控制。
自动飞行
MENU 制导模式 (A)
4/54
现在你将油门杆设置到灵活卡槽用于起飞。 FMA指示: MAN FLX 49(人工灵活49),表示现在完全是人工控制推 力并且灵活起飞推力已经设定。 自动推力系统待命,可以通过你在油门杆上的动作接通。
自动飞行
MENU 制导模式 (A)
5/54
FMA还指示: FD的垂直方式为SRS;FD水平指令杆指令一俯仰角 度,它将根据当时的条件,例如双发,单发……,使你 能以指定的基准速度V2飞行。SRS代表速度基准系统。
2/54
你计划飞行的SID(标准仪表离港)航路包括几个航路点上 的 一 些 高 度 限 制: 在 D086C上 为 +6 9 0英 尺 , 在 D164T上 为 FL60,在NERIN上为FL90。
【空客A320培训PPT课件】自动飞行非正常操作
自动飞行
MENU 非正常操作
44/59
把杆飞行员会要求你做ECAM动作。 你必须处理第一个故障AP OFF(自动驾驶仪断开)。
不对,按下任一CLR(清除)键。
自动飞行
MENU 非正常操作
45/59
把杆飞行员会要求你做ECAM动作。 你必须处理第一个故障AP OFF(自动驾驶仪断开)。
不对,按下任一CLR(清除)键。
自动飞行
MENU 非正常操作
47/59
一旦程序完成并经把杆飞行员证实……
清除自动飞行的显示。
自动飞行
MENU 非正常操作
48/59
一旦程序完成并经把杆飞行员证实……
不对,按下任一CLR(清除)键。
自动飞行
MENU 非正常操作
49/59
一旦程序完成并经把杆飞行员证实……
不对,按下任一CLR(清除)键。
自动飞行
MENU 非正常操作
46/59
然后你处理第二个故障: AUTO FLT FCU 1+2 FAULT(自动飞行FCU 1+2失效)。 与 备 用 高 度 表 比 较 检 查 PFD 上 的 气 压 基 准 ( 自 动 设 置 为 QNH 1013)。 一旦低于过渡高度,将备用高度表的气压基准设置为实际的 QNH。
自动飞行
MENU 非正常操作
1/59
FMGC 1
自动飞行
两部FMGC通过交流汇流条交换数 据并且同步。
驱动同步的FMGC称为主FMGC。 自动驾驶仪/飞行指引仪的接通状态 自动确定那部FMGC为主: 如果1号自动驾驶仪接通,则1号 FMGC为主, 如果2号自动驾驶仪接通,则2号 FMGC为主, 如果1号和2号自动驾驶仪以及/或1 号和2号飞行指引仪都接通,则1号 FMGC为主。 自动推力由主FMGC驱动。 当两部FMGC交流时,它们处于双 重工作方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2/54
你计划飞行的SID(标准仪表离港)航路包括几个航路点上 的 一 些 高 度 限 制: 在 D086C上 为 +6 9 0英 尺 , 在 D164T上 为 FL60,在NERIN上为FL90。
通过按下EFIS控制面板上的CSTR(限制)键可以在ND上看 到这些限制值。在MCDU上,在有高度限制的航路点的预测高 度值前标有一个彩色的星号。
自动驾驶仪可在离地后5秒,在大约离地100英尺高度 上接通。我们已经为你接通了自动驾驶仪。
自动飞行
MENU 制导模式 (A)
8/54
一旦飞机到达减推力高度,FMA就显示 白色闪亮的LVR CLB(油门杆爬升)信息 。
这表示你必须将油门杆设置到爬升卡槽 。
请将油门杆放到爬升卡槽。
自动飞行
MENU 制导模式 (A)
自动飞行
MENU 制导模式 (A)
14/54
飞机现在快要到达高度限制(FL60):
方式
自动接通,表示自动驾驶仪/飞行指引仪
的垂直方式指令截获这一高度,
在PFD的高度刻度上,洋红色的FL60的指示向当前高
度窗口接近。
自动飞行
MENU 制导模式 (A)
15/54
你 现 在 在 限 制 的 高 度 上 ( FL60),FMA 上 显 示 绿 色 的 ALT CST(高度限制)。
2、在起飞期间,通常把杆飞行员的MCDU上选择性能 页面,不把杆飞行员选择飞行计划页面。
PNF:飞行计划页
自动飞行
MENU 制导模式 (A)
7/54
飞机离地后,管理的导航方式自动接通。 自动驾驶仪的导航方式引导飞机沿着飞行员在MCDU 中输入的飞行计划的当前航段飞行。 注意爬升方式仍然是青蓝色的,即爬升待命。
自动飞行
MENU 制导模式 (A)
1/54
PARIS (ORLY)
我们假设你已经将FMGS初始化:输入了从 巴黎奥里(LFPO)到开罗(HECA)的飞行 计划,飞机全重,起飞数据(速度,减推力高 度,加速高度,减推力起飞的灵活温度,等等 。
并且你已经完成了起飞前的所有操作。
自动飞行
CAIRO
MENU 制导模式 (A)
自动飞行
MENU 制导模式 (A)
6/54
PF:性能页面
FD的横向方式为RWY(跑道);FD垂直指令杆指令 偏航/横滚角度,它将使你在滑跑和初始爬升期间跟踪起 飞跑道航道信标。
如果在起飞时没有盲降系统可用,该区域显示空白。 注意:
1、在地面滑跑期间,FD垂直指令杆由偏航指令杆代 替,以便在低能见条件下帮助你滑跑。
在 FMA 上 , HDG( 航 向 ) 表 示 横 向导航现在由FCU航向选择器上所作 的选择控制。
爬升方式待命,当飞机越过限制的航路点D164T时它将 自动重新接通。它在ND上以蓝色的开始爬升箭头表示。
自动飞行
MENU 制导模式 (A)
16/54
你快要到达NERIN,在该点另一高度限制适用。
FMGS预计在该航路点以前飞机将到达这一高度,
这由一个洋红色的符号
表示。
自动飞行系统自动回到THR CLB/CLB(推力爬
自动飞行
MENU 制导模式 (A)
4/54
现在你将油门杆设置到灵活卡槽用于起飞。 FMA指示: MAN FLX 49(人工灵活49),表示现在完全是人工控制推 力并且灵活起飞推力已经设定。 自动推力系统待命,可以通过你在油门杆上的动作接通。
自动飞行Biblioteka MENU 制导模式 (A)
5/54
FMA还指示: FD的垂直方式为SRS;FD水平指令杆指令一俯仰角 度,它将根据当时的条件,例如双发,单发……,使你 能以指定的基准速度V2飞行。SRS代表速度基准系统。
自动飞行
MENU 制导模式 (A)
12/54
你已经接通了1号自动驾驶仪。飞机继续以起飞基准速度爬升直到飞机到 达加速高度,在该高度上:
目标速度自动跳到FMGS计算的(或由飞行员预设的)初始爬升速度, CLB(爬升)垂直方式自动接通;自动驾驶仪调节飞机俯仰姿态以便在 初始爬升速度下爬升直到到达ATC许可的FCU目标高度,或到达飞行计划 的高度限制(如果该限制存在),
ALT(高度)以青蓝色显示,表示高度截获方式待命在FCU上所选的高 度。
自动飞行
MENU 制导模式 (A)
13/54
假设ATC允许你爬升到FL150;你在FCU上设置这一高度。 我们已经看到在D164T航路点上有指定的高度限制(FL60),但是它 是洋红色的而不是青蓝色的,因为FMGS处于爬升方式,因此它将遵守 程序设计中的限制(在D164T上的FL60)。FMGS预计飞机将在该航路 点以前到达FL60,这在ND上以一个洋红色符号 表示。 FMA上洋红色的ALT以及高度刻度上洋红色的目标高度FL60表示自动 驾驶仪将截获这一高度限制,这里该限制是严格的。
自动飞行
MENU 制导模式 (A)
3/54
在起飞前滑行时,注意在FMA上: CLB(爬升)方式以青蓝色显示表示待命;起飞阶段结束 后它将自动接通。
NAV(导航)方式以青蓝色显示表示待命;飞机离地后它 将自动接通。
1FD2表示两部飞行指引仪都接通(尽管由于在地面没有任 何方式接通,FD符号不显示)。
9/54
一旦飞机到达减推力高度,FMA就显 示白色闪亮的LVR CLB(油门杆爬升)信 息。
这表示你必须将油门杆设置到爬升卡槽 。
不对,单击油门杆。
自动飞行
MENU 制导模式 (A)
10/54
一旦飞机到达减推力高度,FMA 就显示白色闪亮的LVR CLB(油门 杆爬升)信息。
这表示你必须将油门杆设置到爬 升卡槽。
升/爬升)方式,并且新的限制成为目标高度。(
FL90和ALT以洋红色显示)。
自动飞行
MENU 制导模式 (A)
17/54
假 设 ATC 命 令 你 保持 当 前 航 向 ( 200)。
我们已经为你选择了200并且拉出 了航向选择器。
在ND上,绿色实线指示飞机的航 迹线,FMGS的飞行计划现在以绿色 虚线表示,因为你不再沿着它飞行。
不对,单击油门杆。
自动飞行
MENU 制导模式 (A)
11/54
你已经将油门杆放到了爬升卡槽。 自动推力系统自动接通:FMA上显示白色的A/THR(自 动推力)。 当前工作的方式为THR CLB(推力爬升)方式;自动推 力系统处于推力方式并且指令最大爬升推力(因为自动驾 驶仪的垂直方式是SRS,并且该方式控制速度)。