kuka机器人常见问题及解决方案
kuka机器人常见问题及解决方案

Kuka机器人常见问题及解决方案1 开机坐标系无效世界坐标系是以枪头为基点,在这种坐标系中机器人所有的动作都是按照以枪头为顶点来完成移动,XYZ方向切割枪方向不改变,如果机器人在世界坐标系中移动,枪头也随着改变方向,那就是我们在开机后没有选择工具。
解决方案:配置→当前工具/基坐标→工具号→12 专家登陆一般情况,开机后我们要编辑程序时,首先我们要登陆专家级别,有助于我们操作。
解救方案:配置→用户组→专家→登陆→密码kuka→登陆3 设置END新建程序我们发现没有终点,我们要设置终点。
解决方案:配置→杂项→编辑器→定一行DEF4 程序第一条设置为home位置编辑程序时,第一条指令要设为home位置,这时我们在最后可以直接找到home位置的标准,可以节省手动移动机器人的操作时间。
5 手动关闭输出信号当我们在测试程序或者正常使用时(已经打开了输出信号),有时候会遇到突发情况,比如说程序路径有撞车危险,或者预热失败,程序错误等等,这时候我们要手动关闭输出信号。
在问题解决完毕后我们可以再次用kcp打开输出信号。
(其中我们的输出信号是3是低压氧,4是高压氧,5是丙烷)解决方案:显示→输入/输出端→数字输出端→按住驱动→数(关闭或者打开)6 6D鼠标失效系统指示6D鼠标仍然有电压之类的提示,鼠标失效了,我们这时可以松开驱动,从新按下去等待驱动指示I 变为绿色即可。
7 从电脑中拷贝程序电脑中拷贝程序,以便C盘中程序丢失后,我们可以从D盘或者外部移动U盘中拷贝使用。
解决方案:专家登陆后→按Num(此时显示器上Num为灰色,在按一下转换回来)→CTRL(2)+Esc→电脑C盘→KRC→ROBOTER→KRC→R1→Program8 机器人保护当机器人撞车后,会启动自动保护,也就是机器人在A6轴处有一个保护系统,当撞车后弹簧被压弯变形,系统接收到信号后会停止一切操作,此时我们无法操作机器人,这时候我们要先关掉保护开关。
KUKA机器人故障处理

•准确分析故障现象 –故障产生时间? –在信息窗里显示什么故障信息?
–故障现象使人想起硬件问题?
检查电源模块,DSE,RDC,KSD等LED。 检查连接电缆 –外部接口信号丢失了吗? 检查 X11 –是偶发故障吗? •比较典型故障现象 •交换元件故障消失吗? •输出状态分析 •最后功能测试
一汽大众
焊装车间
A4/A6维修中心
2003年11月5日
A1-A6在单轴方式 调节器超限位 在激活驱动器和轴移动后 ESC故障 DSE-RDW传输错误 DSE文件“*.bin“ 丢失
ESC-CI 板 (X13)上的跳线丢失
RDW故障, DSERDW连接电缆, DSE故障, RDW电源(F16) KSD-IBS模块 和KPS600连线松动 软件、硬件不匹配 DSE故障
KRC2 不能启动
偶尔有驱动不能接通 偶尔有DSE-RDW传输错误
一汽大众 焊装车间 A4/A6维修中心
DSE-IBS故障 DSE-IBS故障
2003年11月5日
KRC2故障现象 故障号 错误信息 在自动方式驱动不能接通 原因、措施 从X11移动跳线 43-44 (外部驱动使能通过脉冲) 机床数据可能不正确
一汽大众 焊装车间 A4/障显示
LED 5
KPS
LED 3 LED 2
绿LED 5 灭
闪, 1.5 Hz
亮 X X 灭 X X X X X
红 LED 5 灭 X X 闪, 6.1 Hz 闪, 3.1 Hz 亮
闪 5 次, 1.5 Hz 闪 4 次, 1.5 Hz 闪 3 次, 1.5 Hz 闪 2次, 1.5 Hz 闪 1次, 1.5 Hz
一汽大众 焊装车间 A4/A6维修中心
KUKA库卡机器人故障报警维修处理方法

KUKA库卡机器人维修故障处理方法报警文本保存在文件中。
无确访问这些文件中的一个文件。
反响:报警显示。
处理:扩大报警列表( 在文件的报警一节中输入文件最大数量)。
然后执行操作员面板冷再启动。
减少报警文本数目。
然后执行操作员面板冷再启动。
凌肯自动化机械负载是否有突变变频器容量是否太小,增大变频器容量电网电压是否有突变, 过流,减速中或停车时过流, 输出连线绝缘是否良好,电动机是否有短路现象延长减速时间更换容量较大的变频器, 直流制动量太大,减少直流制动量机械故障。
输出线绝缘是否良好, 检查电动机是否堵转故障现象发生时的工作状况.处理方法,过流,恒速中过流检查电动机是否短路或局部短路送厂维修,短路, 对地短路检查电动机连线是否有短路检查输出线绝缘是否良好送修,, 过压, 停车中过压,, 延长减速时间否则加大容量检查机械负载是否有卡死现象 V/F曲线设定不良。
KUKA库卡机器人维修PLC编程840D的集成式PLC完全以标准sIMAncs7模块为根底,PLC程序和数据内存可扩展到288KB,u/o模块可扩展副2048个输入/输出点,PLC程序能以极高的采样速率数据输入,向数控机床发送运动停止/起动等指令。
电机参数的输入变频器的参数输入工程中有一些是电机根本参数的输入,如电机的功率,额定电压,额定电流,额定转速,极数等。
这些参数的输入非常重要,将直接影响变频器中一些爱护功能的正常发挥,肯定要依据电机的实际参数正确输入,以确保变频器的正常使用。
为了能够简化设备系统的传动环节,提升综合传动效率和操纵性能,除了有一般旋转电机以外,变频伺服的传动执行部件还经常会有一些不同类型的动力输出形式,如:旋转直接驱动电机,直线电机,直线电动缸等等。
在将旋转伺服电机的输出动力传递到运动负载的过程中,运控系统系统往往还需要使用到各种伺服级别的机械传动组件,如:联轴器,减速机,同步带,丝杠等等,这一点也是有必要提示大家注意的。
KUKA库卡机器人维修F077维修,F078维修,F079维修,F006维修,F007维修,F008维修,F009维修,F080维修,F081维修,F031维修,运转速度不稳定维修,可控硅晶闸管烧维修,直流调速装置无显示维修,运转速度不连贯维修,高速不稳定维修,低速不稳定维修,启动合闸跳保险维修,运转不出力维修,报励磁故障维修,优化通不过维修,启动报代码故障维修,炸机维修,电源板坏维修,速度不可控维修,超速维修。
库卡机器人程序嵌套溢出的原因

库卡机器人程序嵌套溢出的原因库卡机器人程序的嵌套溢出(NestedOverflow)是指在编写程序时,程序中的嵌套循环或递归调用过深,导致栈溢出的情况。
栈(Stack)是一种数据结构,用来管理程序中的函数调用和局部变量的内存空间。
当一个函数被调用时,程序会将函数的返回地址和局部变量等信息存储在栈中,并在函数执行完毕后释放栈空间。
当程序中的嵌套循环或递归调用过多时,每次函数调用都会将一定的信息压入栈中,如果栈的空间不够大,就会发生栈溢出。
栈溢出会导致程序异常终止、崩溃或者被恶意利用,可能造成系统崩溃或安全漏洞。
1.递归调用过深:在编写程序时,如果使用了递归算法,并且递归调用的次数过多,会导致栈空间被逐渐占满,最终发生栈溢出。
2.嵌套循环过多:在库卡机器人的程序中,如果使用了多层嵌套循环,循环次数过多,会导致栈空间被逐渐占满,最终发生栈溢出。
3.局部变量占用过多栈空间:在函数中定义了过多的局部变量,这些变量会占用栈空间,当这些变量的总大小超过栈的容量时,就会发生栈溢出。
解决库卡机器人程序嵌套溢出问题的方法如下:1.优化算法:针对递归算法,可以考虑使用非递归的方式实现,避免过深的递归调用。
2.减少嵌套循环次数:在编写程序时,可以尽量减少嵌套循环的次数,降低栈的压力。
3.减少局部变量的数量和大小:尽量减少函数中定义的局部变量的数量和大小,避免占用过多的栈空间。
4.增加栈空间的容量:根据库卡机器人系统的要求和硬件条件,可以通过调整编译器或运行环境的设置,增加栈空间的容量。
总之,库卡机器人程序嵌套溢出是因为程序中的嵌套循环或递归调用过深,导致栈空间不够用而发生的问题。
要解决这个问题,可以对算法进行优化,减少循环次数和局部变量的数量和大小,或者增加栈空间的容量。
这样可以预防和减少因嵌套溢出而引发的问题,提高库卡机器人程序的稳定性和安全性。
KUKA机器人故障处理

KUKA故障处理KUKA故障处理文档一:引言本文档旨在提供关于KUKA故障处理的详细指导。
故障可能会对生产线运行和工作效率产生负面影响,因此,本文档将涵盖各种可能的故障情况以及相应的处理方法。
二:常见故障类型2.1 电力故障2.1.1 无法启动(a) 检查主电源是否正常供电(b) 检查电缆连接是否松动(c) 检查电源线是否损坏2.1.2 断电(a) 检查电源线是否连接稳定(b) 检查电源线是否损坏(c) 检查发电机是否正常工作2.2 机械故障2.2.1 关节无法移动(a) 检查关节连接是否牢固(b) 检查润滑油是否充足(c) 检查关节传感器是否正常工作2.2.2 末端执行器异常(a) 检查执行器连接是否正常(b) 检查执行器的运动范围限制(c) 检查执行器的电源供应2.3 控制故障2.3.1 控制器无法启动(a) 检查控制器电源(b) 检查控制器连接是否正常(c) 检查控制器的电源供应2.3.2 控制器程序错误(a) 检查程序是否存在语法错误(b) 检查程序是否存在逻辑错误(c) 检查程序是否被占用或被锁定三:故障处理步骤3.1 故障诊断3.1.1 获取故障现象3.1.2 分析故障现象3.1.3 确定可能的故障原因3.2 故障排除3.2.1 按照故障原因的可能性顺序逐一排除 3.2.2 根据实际情况进行测试验证3.3 故障修复3.3.1 根据故障原因采取相应的修复措施 3.3.2 验证修复效果四:附件本文档附带以下附件供参考:- KUKA操作手册- KUKA维修手册- KUKA控制器连接图五:法律名词及注释1. 法律名词:故障处理注释:故障处理是指对机器、设备或系统发生故障时采取的一系列修复措施和解决方法的过程。
2. 法律名词:润滑油注释:润滑油是一种用于减少机器摩擦和磨损的润滑剂,通常由基础油和添加剂组成。
3. 法律名词:执行器注释:执行器是指用于执行具体运动的装置,常见于和自动化系统中。
4. 法律名词:控制器注释:控制器是指用于控制设备、机器或系统运行的电子设备或程序。
KUKA机器人过载报警消除
KUKA机器人过载报警消除
KUKA机器人如果在新建工具tool时没有设置工具的质量、重心等数据或者直接用默认的tool0时,在机器人运行时可能就会出现“工具过载”的报警,导致机器人突然停机。
对于这种情况最好用软件LoadDataDetermination测试
一下机器人负载数据。
如果条件不满足也可以直接在示教器上更改工具的质量和重心,并将报警信息设置为“警告”,以避免出现突然停机的情况。
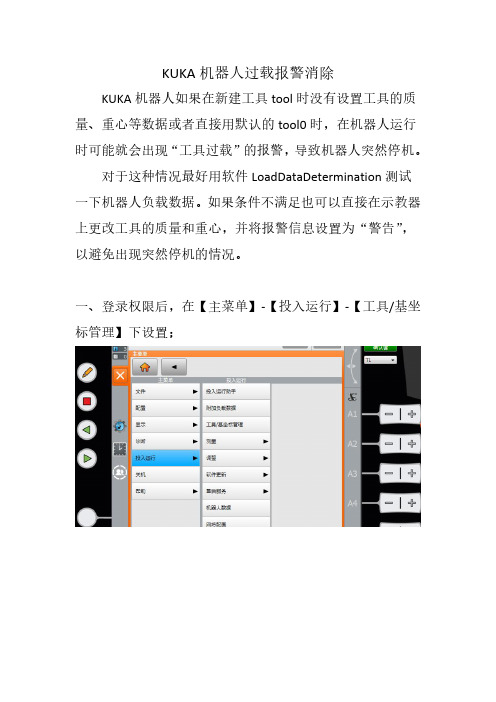
一、登录权限后,在【主菜单】-【投入运行】-【工具/基坐标管理】下设置;
二、新建工具tool1,在【负载数据】下更改工具数据;
三、在【检查负载数据】栏,选择“激活”后,分别设置机器人出现“过载”和“欠载”时机器人的反应机制;
改为“警告”即可,当出现过载时机器人有提示信息但不会停机。
KUKA机器人报警信息处理更新1.1
KUKA报警信息处理
1、KSS00276 机器人参数不等于机器人类型
①登录专家模式
②示教器操作:【菜单】—【显示】—【变量】—【单个】
③名称输入:$ROBTRAFO[]
新值:TRAFONAME[]
④点击【设定值】。
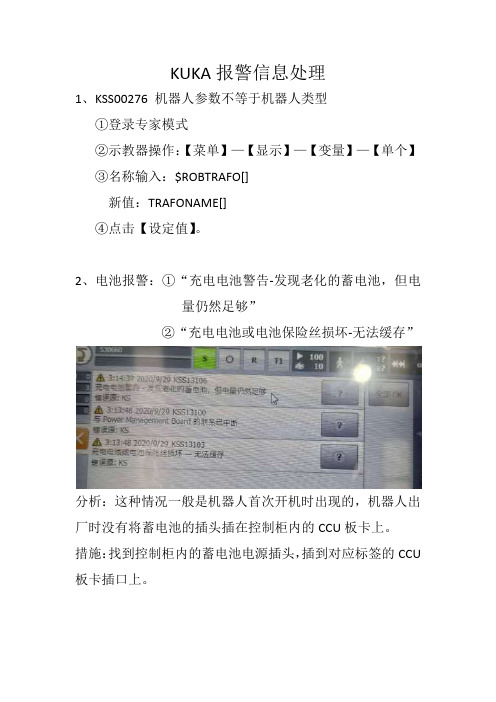
2、电池报警:①“充电电池警告-发现老化的蓄电池,但电
量仍然足够”
②“充电电池或电池保险丝损坏-无法缓存”
分析:这种情况一般是机器人首次开机时出现的,机器人出厂时没有将蓄电池的插头插在控制柜内的CCU板卡上。
措施:找到控制柜内的蓄电池电源插头,插到对应标签的CCU 板卡插口上。
3、.KSS00203-全部运行开通
措施:①【主菜单】—【配置】—【输入/输出端】—【外部自动运行】下;
②在【输入端】找到$MOVE_ENBALE对应的通道改为
1025。
如果外部自动运行时,检查PLC端信号。
4、KSS00308 卸码垛模式:将轴A5+移到位
①登录专家模式
②示教器操作:【菜单】—【显示】—【变量】—【单个】
③名称输入:$pal_mode
新值:true
④点击【设定值】更新
⑤重启控制柜。
5、KSS15012 确认开关损坏
分析:示教器使能键分三个档位:
①正常不按时为一个档位;
②正常上电移动机器人时,第二个档位;
③按到底时第三个档位,会出现安全停止的报警。
处理:将使能键按到底,会出现“确认开关故障”的确认信息,点击“OK”即可。
常见的KUKA机器人示教器故障以及相应的维修方法

常见的KUKA机器人示教器故障以及相应的维修方法KUKA机器人示教器是一种用于编程和控制KUKA工业机器人的重要设备。
虽然它具有可靠性和耐用性,但有时也会遇到需要维修的情况。
以下将介绍一些常见的KUKA机器人示教器故障以及相应的维修方法。
1、如果示教器无法开机或无法显示图像,可能是由于电源问题引起的。
确保示教器连接正确的电源插座,并检查电源线是否完好无损。
如果仍然无法解决问题,可以尝试更换电源适配器或联系KUKA技术支持获取进一步的帮助。
2、如果示教器屏幕上显示错误信息或操作异常,可能是软件问题导致的。
可以尝试重新启动示教器,并检查是否存在任何软件更新。
如果问题仍然存在,可以尝试恢复出厂设置或重新安装机器人编程软件来解决问题。
在执行这些操作之前,请务备份任何重要的程序和数据。
3、示教器的触摸屏可能会出现响应迟缓或失灵的情况。
首先,清洁触摸屏表面,确保没有污垢或液体影响其正常操作。
如果问题仍然存在,可以尝试校准触摸屏或更换故障的触摸屏模块。
最好在进行这些维修操作之前咨询专业人员的建议。
4、示教器的按键和控制杆也可能出现损坏或失效的情况。
如果某个按键无法正常工作,可以尝试清洁或更换按键。
对于控制杆问题,可以检查连接线路是否完好,并确保控制杆没有受到物理损坏。
如果需要更换控制杆,建议联系KUKA经销商或技术支持获取合适的替代品。
KUKA机器人示教器维修需要注意安全,并尽量由经过培训和熟悉机器人系统的专业人员进行操作。
如果遇到无法解决的问题,建议及时联系KUKA技术支持或经销商寻求帮助。
保持设备的良好维护和定期检查也有助于减少故障发生的可能性,并延长示教器的使用寿命。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Kuka机器人常见问题及解决方案
1 开机坐标系无效
世界坐标系是以枪头为基点,在这种坐标系中机器人所有的动作都是按照以枪头为顶点来完成移动,XYZ方向切割枪方向不改变,如果机器人在世界坐标系中移动,枪头也随着改变方向,那就是我们在开机后没有选择工具。
解决方案:配置→当前工具/基坐标→工具号→1
2 专家登陆
一般情况,开机后我们要编辑程序时,首先我们要登陆专家级别,有助于我们操作。
解救方案:配置→用户组→专家→登陆→密码kuka→登陆
3 设置END
新建程序我们发现没有终点,我们要设置终点。
解决方案:配置→杂项→编辑器→定一行DEF
4 程序第一条设置为home位置
编辑程序时,第一条指令要设为home位置,这时我们在最后可以直接找到home位置的标准,可以节省手动移动机器人的操作时间。
5 手动关闭输出信号
当我们在测试程序或者正常使用时(已经打开了输出信号),有时候会遇到突发情况,比如说程序路径有撞车危险,或者预热失败,程序错误等等,这时候我们要手动关闭输出信号。
在问题解决完毕后我们可以再次用kcp打开输出信号。
(其中我们的输出信号是3是低压氧,4是高压氧,5是丙烷)
解决方案:显示→输入/输出端→数字输出端→按住驱动→数(关闭或者打开)6 6D鼠标失效
系统指示6D鼠标仍然有电压之类的提示,鼠标失效了,我们这时可以松开驱动,从新按下去等待驱动指示I 变为绿色即可。
7 从电脑中拷贝程序
电脑中拷贝程序,以便C盘中程序丢失后,我们可以从D盘或者外部移动U盘中拷贝使用。
解决方案:专家登陆后→按Num(此时显示器上Num为灰色,在按一下转换回来)→CTRL(2)+Esc→电脑C盘→KRC→ROBOTER→KRC→R1→Program
8 机器人保护
当机器人撞车后,会启动自动保护,也就是机器人在A6轴处有一个保护系统,当撞车后弹簧被压弯变形,系统接收到信号后会停止一切操作,此时我们无法操作机器人,这时候我们要先关掉保护开关。
解决方案:配置→输入/输出端→外部自动→允许运动→把5改成1025→此时机器人就不受系统保护限制可以移动,注意调节机器人运动方向,调整运动速度,离开撞车点,到达安全位置后把“允许运动”的数值调成5 即可。
9 下列情况下kuka机器人需要重新标定零点
机器人没有完全关闭下,蓄电池电量消耗殆尽后会丢失零点。
机器人撞到硬限位了时,会丢失零点。
手动删除零点。
开机失效,直接就关机会丢失零点。
10 程序数据参数
切割速度直线和圆弧都是0.005m/s ,加速度1% 机器人移动速度PTP是20% 或者10%
直线移动速度(非切割)0.05m/s ,加速度70%
输出信号:3是低压氧,4是高压氧,5是丙烷。