计算机控制系统模拟试题
(完整版)计算机控制系统试题库1
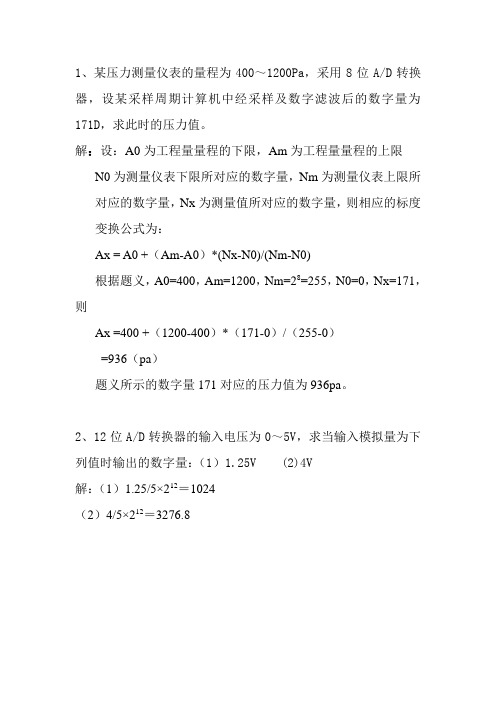
1、某压力测量仪表的量程为400~1200Pa,采用8位A/D转换器,设某采样周期计算机中经采样及数字滤波后的数字量为171D,求此时的压力值。
解:设:A0为工程量量程的下限,Am为工程量量程的上限N0为测量仪表下限所对应的数字量,Nm为测量仪表上限所对应的数字量,Nx为测量值所对应的数字量,则相应的标度变换公式为:Ax = A0 +(Am-A0)*(Nx-N0)/(Nm-N0)根据题义,A0=400,Am=1200,Nm=28=255,N0=0,Nx=171,则Ax =400 +(1200-400)*(171-0)/(255-0)=936(pa)题义所示的数字量171对应的压力值为936pa。
2、12位A/D转换器的输入电压为0~5V,求当输入模拟量为下列值时输出的数字量:(1)1.25V (2)4V解:(1)1.25/5×212=1024(2)4/5×212=3276.83、已知G1(S )=S 3,G2(S )=32+S ,试分别求出他们中间没有采样开关隔开时,和中间有采样开关隔开时的脉冲传递函数。
解:(1)没有采样开关时:G (Z )=Z[G1(S)G2(S)]=Z[3/S *2/(S+3)]=2Z[1/S -1/(S+3)]=)1(23TeZ zZ Z ---- (3分)(2)中间有采样开关时:()()TT e Z Z Z e Z Z Z Z S G Z S G Z Z G Z G Z G 323212116213)]([)]([)()()(----=-*-=*==4.用双线性变换法、后向差分法离散下列连续函数121)(2++=S S S D设T=2S ,写出其脉冲传递函数及差分方程。
解:(1)双线性变换法令11112--+-=Z Z T S 代入式中得)()(5.01)21(25.0121)(1212Z E Z U ZZ Z S S Z D =-++=++=--- 等效差分方程为U(k)=0.5u(k-1)+0.25e(k)+0.5e(k-1)+0.25e(k-2) (2)后向差分法令T Z S 11--=)()(694121)(212Z E Z U ZZ S S Z D =+-=++=-- 等效差分方程为 u(k)=4e(k)/9+2u(k-1)/3-u(k-2)/95、设计算机控制系统中广义对象的脉冲传递函数)268.01()1()2.01)(78.21(000392.0)(121111-------++=Z Z Z Z Z Z G 设系统采样周期T=0.05S ,典型输入信号为斜坡信号,试设计最少拍有纹波控制系统。
计算机控制系统(B)朱立达试题答案

东北大学继续教育学院计算机控制系统试卷(作业考核线上) B 卷学习中心:院校学号姓名(共 3 页)一、选择题(每题4分)1.单位阶跃输入下输出响应,经过( A )周期就稳定在设定值上。
A. TB. 4TC.3TD.2T2.下列哪个不是计算机控制系统控制过程的步骤?( C )A.数据采集B. 计算机控制量C. 数据转换D.输出控制信号3.连续控制系统的稳定性条件是S平面的( D )部分。
A单位圆内 B. 单位圆外 C. 右半 D.左半4.连续控制系统的不稳定性条件是S平面的( D )部分。
B.单位圆内 B. 单位圆外C. 左半D.右半5.二阶系统的超调量与( C )?A.固有频率无关,阻尼比无关B. 固有频率有关,阻尼比无关C. 固有频率有关,阻尼比有关D. 固有频率无关,阻尼比有关6. 低通滤波器可以让高于( A )Hz虑掉。
A. 80B. 60C. 70D.507.计算机控制系统稳定性条件是Z平面的( D )部分。
A. 左半B. 单位圆外C. 单位圆内D.右半8.下列属于共模干扰?( A )A电容的静电耦合 B. 长线传输的互感 C.变压器漏电 D.磁场耦合9.下列哪个不属于计算机控制系统的过程输入通道。
( C )A.温度B. 压力C. 继电器D.流量10.计算机控制系统是以( A )为核心部件的自动控制系统。
A.控制器B. 计算机C. 转换器D.保持器二、判断题(每题2分)1. PID的积分环节经常单独使用。
( F )2. 转速传感器的激励绕组与输出绕组之间在空间相差180°( T )3. 空间辐射干扰中来自通道的干扰最大。
( F )4. 一般采用多路通道共享采样/保持或模数转换器。
( T )5.被控对象可以是模拟量,不可以是开关量。
( F )6. 低通滤波器可让80Hz的工频信号无衰减地通过。
( T )7. 计算机控制系统的分析与设计是以系统的数学模型为基础。
( T )8. 计算机的硬件对计算机控制系统的非常重要,管理计算机的程序及过程控制的应用程序。
计算机控制系统

计算机控制系统计算机控制系统(PLC、DCS)基本原理 2 1P1.当可编程序控制器用一个中心单元不能满足所要求的控制任务时,就要对系统进行扩展。
通讯接口就是用于连接中心单元与扩展单元、扩展单元与扩展单元的模板。
(×)正确答案:当可编程序控制器用一个中心单元不能满足所要求的控制任务时,就要对系统进行扩展。
扩展接口就是用于连接中心单元与扩展单元、扩展单元与扩展单元的模板。
P2.PLC经过自诊断、与编程器等的通信、输人采样、用户程序执行、输出刷新这五个阶段的工作过程,称为一个扫描周期。
(√) P3.集散控制系统的基本特点是彻底分散控制,集中管理。
(×)正确答案:集散控制系统的基本特点是相对分散控制,集中管理。
X1.集散控制系统是利用微型计算机技术对生产过程进行(A)。
A.分散控制B.计算机控制C.分布式控制D.程序控制X2.CENTUMCS 3000R3系统中,(C)是具有工程组态功能的PC机,如可以进行系统组态或在线维护。
A.现场控制站FCS B.人机接口站HISC.工程师站ENG D.实时控制总线Vnet卡件知识4 1P1.SUPCON JX-300XP DCS的主控卡、数据转发卡既可冗余工作,也可单卡工作。
(√)X1.SUPCON JX-300XP DCS数据转发卡的p地址范围是(C)。
A.2-31B.0-31C.0-15 D.1-29X2.在DCS系统供电中,卡件的本身的工作电压是(A)。
A.+5伏B.+24伏C.+25.5伏D.+12VX3.JX-300XP DCS信息管理网和过程控制网中,通讯最大距离是(C)。
A.l km B.5km C.10km D.15 kmX4.在进行报表制作时,每张报表最多只能对(B)事件进行定义。
A.32个B.64个C.128个D.256个信号报警联锁系统逻辑控制知识8 4P1.在配有信号联锁系统的工艺生产过程,当某些工艺变量(如压力、温度、流量、液位等)出现偏差或生产过程不稳定或仪表发生故障等情况时,以灯光和声响引起操作者的注意,或自动停车或自动操纵事故阀门,使生产过程自动处于安全状态,这是确保产品质量及设备和人身安全所必需的。
2023大学_计算机控制技术试题及答案
2023计算机控制技术试题及答案2023计算机控制技术试题及答案(一)一、填空题(共20分,每题2分)1、计算机系统由和两大部分组成。
2、集散控制系统(DCS)的结构模式为:3、变送器输出的信号为或的统一信号。
4、模拟输出通道的结构型式主要取决于的构成方式。
5、数控系统一般由数控装置、、和检测装置等。
6、设线性定常系统的输出方程为y(t)=Cx(t),y(t)以最少的N拍跟踪参考输入r(t),必须满足条件7、常用的状态观测器有3种:、、8、“若A则B,否则C”,用模糊关系表示为9、在一些对程序流向起决定作用的指令前插入两条指令,以保证弹飞的程序迅速纳入正确轨道。
10、采用双绞线作信号引线的目的是二、选择题(共15分,每题3分)1、如果模拟信号频谱的最高频率为fmax,只要按照采样频率( )进行采样,那么采样信号就能唯一的复观。
A、f2fmaxB、f12fmaxC、f2fmaxD、ffmax 212、一个10位的A/D转换器(量化精度0、1%),孔径时间10s,如果要求转换误差在转换精度类,则允许转换的正弦波模拟信号的最大频率为( )A、15HzB、16HzC、17HzD、14Hz3、设加工第一象限直线OA,起点为O(0,0),终点为A(6,3),进行插补计算所需的坐标进给的总步数Nxy为( )A、7B、8C、9D、104、( )数字滤波方法适用于周期性干扰。
A、平均值滤波法B、中位值滤波法C、限幅滤波法D、惯性滤波法5、已知偏差e(k),积分分离阈值,以下正确的是( )A、当e(k)时,采用PI控制B、当e(k)时,采用PD控制C、当e(k)时,采用PD控制D、当e(k)时,采用PI控制三、名词解释(共30分,每题6分)1、接口过程通道量化自动校准 HMI四、简答题(共20分,每题5分)1、什么是计算机控制系统?它的工作原理是怎样的?2、什么是共模干扰?如何抑制?3、直线插补计算过程有哪几个步骤?4、程序设计通常分为哪五个步骤?5、如何消除积分饱和?2023计算机控制技术试题及答案(二)一、填空题(合计20分,每题2分)1、工业控制机是指按生产过程控制的特点和要求而设计的计算机,它包括硬件和软件两个组成部分。
《计算机控制技术》期末模拟考试题(附答案)

《计算机控制技术》期末模拟试题(一)一、填空题(每空2分.共20分)1.闭环负反馈控制的基本特征是。
2.闭环控制系统里.不同输出与输入之间的传递函数分母。
3.惯性环节的主要特点是.当其输入量发生突然变化时.其输出量不能突变.而是按变化。
4.静态误差系数是系统在典型外作用下精度的指标.静态误差系数越大.精度。
5.系统的相稳定裕度γM .定义为开环频率特性在截止频率ωc处。
6.离散系统稳定性与连续系统不同.它不仅与系统结构和参数有关.还与系统的有关。
7.零阶保持器是一个相位滞后环节.它的相频特性φ(ω)= 。
8.若已知闭环系统自然频率为ωn .经验上.采样频率ωs应取。
9.通常把叠加在被测信号上的干扰信号称为。
10.为使传感器特性与A/D变换器特性相匹配.通常应在传感器与A/D之间加入。
二、选择题(每题2分.共10分)1.在计算机控制系统里.通常当采样周期T减少时.由于字长有限所引起的量化误差将。
A 增大;B 减小;C 不变。
2.控制算法直接编排实现与串联编排实现相比.有限字长所引起的量化误差。
A 较大;B 较小;C 相当。
3.某系统的Z传递函数为G(z) = 0.5(z+0.5) / (z+1.2)(z-0.5) .可知该系统是。
A稳定的;B不稳定的;C 临界稳定的。
4.若以电机轴的转角为输入量.电机轴的转速为输出量.则它的传递函数为环节。
A 积分;B 微分;C 惯性。
5.在确定A/D变换器精度时.通常要求它的精度应传感器的精度。
A 大于;B 小于;C 等于。
三、简答题(每小题5分.共20分)1.图1为水箱水位自动控制系统.试说明基本工作原理。
图12.已知单位负反馈闭环控制系统的单位阶跃响应的稳态误差为0.1.试问该系统为几型系统.系统的开环放大系数为多少?3.试简单说明系统稳定性与稳态误差相互矛盾的关系。
4.试表述采样定理.并说明若一高频信号采样时不满足采样定理.采样后将会变成何种信号。
四、(10分)已知单位负反馈系统开环传递函数为 G(s)=ωn 2/s(s+2ζωn )实测求得单位阶跃响应的σ%=4.3%.t s =2.5秒.试写出闭环传递函数并求ωn .ζ为多少。
计算机控制系统模拟题一

计算机控制系统试题(A卷)分析说明或计算下列各题:1.画出计算机控制系统的方框图,并分别说明各单元的作用。
(15分)2.写出数字PID位置型和增量型控制算法的计算式,并比较两种算法的优缺点。
(15分)3.在数字PID中,采样周期T的选择需要考虑哪些因素?(15分)4.已知被控对象的传递函数,采样周期Ts,采用零阶保持器,单位负反馈系统。
要求针对单位阶跃输入信号设计最少拍无纹波系统的,并计算输出响应和控制信号序列。
()(15分)5.被控对象的脉冲传函,采样周期T=1s,试用达林算法设计τ=2s的,对于单位阶跃输入的数字控制器D(z),并计算输出响应和控制信号序列。
()(15分)6.动态矩阵控制算法为何只能适用于渐近稳定的对象?对模型时域长度N有什么要求?若N取得太小会有什么问题?(10分)7.说明计算机控制网络的特点以及控制网络与信息网络的区别。
(15分)附录常用Z变换表拉氏变换时域函数f(t)Z变换 F(z)F(s)1 δ(t) 1δ(t-kT)1(t)t计算机控制系统试题答案(A卷)1.答:计算机控制系统的基本框图如下:(8分)①测量变送器:测量被控对象的控制参数,并变换成一定形式的电信号;(1分)②A/D转换器:将电信号转换成数字信号反馈给计算机;(1分)③控制器:将反馈信号与给定值信号进行比较,得到的偏差信号按照一定的控制算法输出数字控制信号;(2分)④D/A转换器:将数字控制信号转换为模拟控制信号驱动执行器;(1分)⑤执行机构:接受模拟控制信号,改变被控对象的控制参数值;(1分)⑥被控对象:工艺参数需要控制的生产过程、设备或机器等。
(1分)2.答:位置型PID算法:(3分)增量型PID算法:(3分)位置型PID算法与增量型PID算法比较:①增量型算法不需要做累加,计算误差或计算精度问题,对控制量的计算影响较小。
而位置型算法要用到过去误差的所有累加值,容易产生大的累加误差。
(3分)②增量型算法得出的是控制量的增量,误动作影响小,而位置型算法的输出是控制量的全量输出,误动作影响大。
计算机控制技术-试题-总结讲解学习
计算机控制技术-试题-总结讲解学习1. 若连续信号的最⾼频率为ωmax ,按采样定理要求,采样频率ωs 应 >=2ωmax 。
2. 通常在传感器与A/D 之间加⼊调理电路的⽬的是使模拟输⼊电压满⾜A/D 转换量程要求。
3. 计算机控制系统的输⼊与输出信号主要分为数字信号与模拟信号。
4. 计算机控制系统的⼯作过程可归纳为以下三步:实时数据采集、实时控制决策、实时输出控制。
5. 共模⼲扰的抑制⽅法主要有:变压器隔离、光电隔离、浮地屏蔽、采⽤仪表放⼤器提⾼共模抑制⽐。
6. ⼀般数控系统组成包括:输⼊装置、输出装置、控制器和插补器等四⼤部分组成。
7. 控制系统的四⼤要素是:给定量、执⾏机构、控制对象以及被控量。
8. 传感器把⽣产过程的信号转换成电信号,然后⽤A /D 转换器把模拟信号变成数字信号,读⼊计算机中,对于这样得到的数据,⼀般要进⾏⼀些预处理,其中最基本的处理有线性化处理、标度变换和系统误差的⾃动校准。
9. 计算机控制中的数字PID 控制算法有数字PID 位置型控制算法和数字PID 增量型控制算法两种基本形式。
10. 经常采⽤的软件抗⼲扰技术包括:数字滤波技术、开关量的软件抗⼲扰技术、指令冗余技术、软件陷阱技术等。
11. 采⽤差分放⼤器作为信号前置放⼤是抑制串模⼲扰的⽅法之⼀。
12. 通常把叠加在被测信号上的⼲扰信号称为串模⼲扰。
13. 若信号的动态范围为N ,计算机字长n ≥ log2 (1+N) 。
1、计算机控制系统由计算机和被控对象(或⽣产过程)两部分组成。
计算机控制系统的基本⼯作原理可以归纳为:实时数据处理、实时监督决策、实时控制及输出。
3、若ωmax 为被采样的连续信号的最⾼频率,根据⾹农采样定理,采样周期必须满⾜ T<π/ωmax4、⼈机接⼝的作⽤:⼀是输⼊程序或数据,完成各种操作控制;⼆是显⽰⽣产过程的⼯艺状况与运⾏结果。
6、为使传感器特性与A/D 变换器特性相匹配,通常应在传感器与A/D 之间加⼊调理电路。
计算机操作系统模拟试题及答案

张顺全计算机操作系统模拟试题(二)张顺全一、选择题(红色数字、符号是答案。
笔67-16)1. 在分时系统中,导致创建进程的典型事件是A2;在批处理系统中导致创建进程的典型事件是B2;由系统专门为运行中的应用进程创建新进程的事件是C4。
(汤’165题5、汤’204)A:⑴用户注册⑵用户登录⑶用户记账⑷用户通信B:⑴作业录入⑵作业调度⑶进程调度⑷中级调度C:⑴分配资源⑵进程通信⑶共享资源⑷提供服务2. 从下面对临界资源的论述中,选出一条正确的论述,并在其前面打“√”。
(汤’165题6)⑴临界区是指进程中用于实现进程互斥的那段代码⑵临界区是指进程中用于实现进程同步的那段代码⑶临界区是指进程中用于实现进程通信的那段代码⑷临界区是指进程中用于访问共享资源的那段代码√⑸临界区是指进程中访问临界资源那段代码3. 在生产者-消费者问题中,应设置互斥信号量Mutex、资源信号量full和empty。
它们的初始值应分别是A2、B1和C5。
(汤’165题9)A、B、C:⑴0 ⑵1 ⑶-1 ⑷-n ⑸+n4. 从下面预防死锁的论述中,选出一条正确的论述,并在其前面打“√”。
(汤’166题16、汤’204、汤六122-4)⑴由于产生死锁的基本原因是系统资源不足,因而预防死锁的有效方法,是根据系统规模,配置足够的系统资源⑵由于产生死锁的另一基本原因是进程推进顺序不当,因而预防死锁的有效方法,是使进程的推进顺序合法⑶因为只要系统不进入不安全状态,便不会产生死锁,故预防死锁的有效方法,是防止系统进入不安全状态√⑷可以通过破坏产生死锁的四个必要条件之一或其中几个的方法,来预防发生死锁5. 根据作业说明书中的信息对作业进行控制,称此种作业为A4;用终端键盘命令直接控制作业运行的作业称为B1。
(汤’170题1、笔67-17)A:⑴计算型作业⑵终端型作业⑶联机作业⑷脱机作业B:⑴联机作业⑵I/O型作业⑶批处理作业⑷脱机作业6. 作业由进入状态转变为后备状态,是由A3完成的,由后备状态到运行状态B2完成的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4、ADC 的基本任务是:
。
5、ADC 芯片主要由
和
组成。
6、ADC 的主要性能指标:
、
、
。
7、A/D 转换器分类:
、
、
、
。
8、用单片机控制 ADC 时,采用:
、
、
。
9、开关量输入/输出通道由三部分组成:
、
、
。
10、开关量输入信号的调理包括:
、
、
、
、
。
11、根据现场开关器件功率的不同,开关量驱动电路的构成方式有:
、
、
、
。
12、危险场所分类:
、
、
。燃爆条件:
、
、
。防爆设备分类:
、
。安全栅分为:
、
、
。
CH3 抗干扰技术
1、构成干扰的三个要素:
、
、
。
2、干扰分类,按干扰耦合的形式分
类:
、
、
、
。按干扰与信号的关系分类:
、
。
按干扰源的类型分类:
、
。按干扰信号的性质分
类:
、
。
3、常用抑制干扰的措施主要有:
、
、
、
、
、
。
4、 按需屏蔽的干扰场的性质,屏蔽可分为
、
、
、
。
7、在通信参考模型所对应的四个分即:
、
、
、
。 按各部分在物理设备中要完成的功能,被分为:
、
、
。
8、典型现场总线 FF 协议模型分四层:
、
、
、
。其中应用层有两个子层:
和
。
CH7 组态软件
1、组态软件的特点是:
、
、
、
、
。
2、一般的组态软件由下列组件组成:
、
、
、
。
3、实时数据库的特征是:
、
。基本特征是:
、
、
、
。
8、外部总线分为:
、
。
CH2 过程通道技术
1、DAC 的主要技术指标:
、
、
、
、
。
2、DAC0832 与单片机的连接可以根据需要选择
,如果需要多路数字
量同时转换输出,应该采用
,而一般情况下,就应该采用
。
3、D/A 转换器的输出常用于控制大电流设备,而这些设备常常会带来干扰信
号 ,一般都会使用
进行隔离。
、
等信息化集成化系统发展。向下发展:即向
发展。
5、DCS 的结构是一个
,从整体逻辑结构上讲,是一个
。
其纵向结构分为
、
和
和
,四级递阶
结构。整个系统由三大部分构成,即:
、
和
。
6、DCS 系统的体系结构按功能通常分为四级,第一级为
,第二级
为
,第三级为
,第四级为
。各级之间通
过
相连,各级内部各站或单元由本级的
4、了解当前现场总线的八种国际标准及三大组织。了解八种现场总线体系结构 和通信协议有何不同。 5、能够举例说出两、三种典型现场总线的特点及其应用领域。
6、掌握 FF 总线中现场访问子层的三种虚拟关系。 7、掌握 FF 的系统组态的步骤(即两个阶段)。 CH7 组态软件 1、掌握组态及组态软件的概念
2、组态软件要解决哪些问题?使用组态软件的步骤是什么?组态软件主要由哪 几种组件组成,每一类组件的基本功能。
3、组态软件在自动监控系统中所处的地位如何?
4、以使用软件的工作阶段划分(按系统环境划分)组态软件有几类? 5、实时数据库的特征。 5、怎样进行实时数据库系统的数据连接组态 ?
6、设备驱动程序完成的主要功能?
4、什么是标度变换,为什么要进行标度变换,标度变换有那些方法?
CH6 现场总线系统 1、掌握现场总线的概念(定义)。掌握现场总线的实质、核心以及基础是什么。
2、掌握现场总线标准化的三个基本要素,掌握根据基本要素将现场总线分为的 四种类型,每种类型的代表总线是哪些。 3、掌握 IEC61158 现场总线网络协议模型,能够说出每一层的具体功能。
、
。
5、标度变换方法有:
、
、
、
。
CH6 现场总线系统
1、现场总线的实质是:
。
2、现场总线系统的技术特点:
、
、
、
。
3、产生现场总线的基本条件是 3C 技术:
、
、
。核心是
。
4、现场总线通信协议基本模型是
与
。
5、结合现场总线的特点和 OSI 模型,将现场总线标准化的内容划分为三个基本
要素:
、
和
。
6、根据这些基本要素,可将现场总线标准分为四种类型:
2、掌握 8251 工作方式控制字的详细含义,能够根据要求给出工作方式控制字, 能够根据工作方式控制字判断 8251 当前工作方式。
3、了解 8251 的应用;RS-232C 以及其他串口通信接口。
4、为什么 RS-232C 需要电平转换电路? CH5 数据采集与处理 1、掌握数据采集系统的主要功能及基本功能。 2、数据采集的三种工作方式。 3、数据采集系统常用的数据处理由哪几种。
CH3 抗干扰技术 1、如何提高计算机控制系统的可靠性?
2、干扰的主要类型有哪些?这些干扰如何对控制系统产生作用?
3、电源干扰的主要类型有哪些?电源干扰耦合系统的主要途径有哪些?
4、抑制电源干扰的主要方法有哪些?
CH4 计算机串口通信 1、掌握串口通信中波特率的计算,掌握调制和解调,同步串口通信和异步串口 通信的不同。
。
4、OPC 是
。
OPC 规范包括
和
。OPC 服务器由 3 类对象组成,相当
于 3 种层次上的接口:
、
、
。
CH8 DCS
1、工业控制网络的最基本要求是:
2、集中计算机控制存在三个主要问题:
。
3、4C 技术指
、
、
。
、
、
、
、
和
。
3、DCS 的特点:
、
、
、
、
、
、
。
4、分布式控制系统的展望,向上发展:即向
10、TDC-3000 系统在 LCN 上挂接有哪些主要模件 ? 11、简述 I/A Series 的硬件体系结构。 12、简述 I/A Series 的通信网由四层网络结构组成 。 13、DCS 操作员站主要功能。 14、DCS 工程师站主要功能。 15、简述集散控制系统的软件体系结构。
信分两大类:
、
。
2、要求 8251 工作在异步方式下,波特率因子是 16,数据位 8 位,奇校验,1
位终止位,则工作方式控制字应该是
。
CH5 数据采集与处理
1、数据采集系统基本功能:
、
、
、
、
、
。
2、数据采集系统的三种工作方式:
、
、
。
3、数据采集系统常用的数据处理:
、
、
、
、
。
4、数字滤波可分为:
、
、
、
的
干扰 ;
的干扰是通过电源耦合进来的。
11、电源干扰的基本类型:
、
、
、
、
12、电源抗干扰的基本方法:
、
、
整流后抑制干扰措施包括:
、
13、软件可靠性技术主要包括以下两个方面的内容:
。
14、微机用不间断电源 UPS:是
是
。
、 。 。 。 、
;
CH4 计算机串口通信
1、计算机系统中,两种通信方式是:
、
。串行通
一、填空题
计算机控制系统
CH1 绪论
1、计算机控制系统应用领域:
、
、
、
、
、
。
2、计算机控制系统的控制步骤可归纳为:
、
、
。
3、计算机控制系统的工作方式:
、
。
4、计算机控制系统的硬件组成:
、、计算机控制系统的软件组成:
、
、
。
6、计算机控制技术朝着以下几方面发展:
、
、
、
、
、
。
7、内部总线按功能分 4 类总线:
进行通信联系。
7、综合自动化系统应具有以下三个层次。从底向上依次为:
、
、
。
二、简答题
CH1 绪论
1、计算机控制系统的含义?
2、计算机控制系统的典型结构?主要优点是什么?
3、计算机控制系统的硬件组成 ?
4、按控制系统的功能及结构特点分类为哪几种,每种的特点及适用场合? 5、什么是总线,IEEE-488 总线的三种工作方式是什么? CH2 过程通道技术 1、过程通道的主要作用。开关量输入输出为什么也需要接口通道 ? 2、分辨率的计算。 3、模拟量输出通道 DAC0832 芯片的应用与编程。(包括定时器的时间常数计算) 4、模拟量输入通道由哪两部分组成,每部分的作用?A/D 转换的有哪四种类型?
8、OPC 服务器的组成及各部分功能?
CH8 DCS 1、概述 DCS 的产生过程,并分析其设计思想和设计原则。 2、试分析 DCS 的发展历程,DCS 随着哪四项技术的发展而不断更新?
3、总结 DCS 的特点和优点。 4、DCS 的层次结构一般分为几层,并概述每层的功能。 5、简述 DCS 的组成结构(分层结构)及各层的功能(画图)。 6、简述集散控制系统的主要功能。 7、DCS 应用设计的主要内容有哪些?DCS 应用工作流程有哪些? 8、DCS 应用设计的标准是什么?总体设计的原则主要体现在哪些方面? 9、TDC-3000 通信系统主要由哪几部分组成?