旋转变压器与编码器的区别
机床进给伺服系统所用的检测部件主要有旋转变压器和脉冲编码器两种

机床进给伺服系统所用的检测部件主要有旋转变压器和脉冲编码器两种,在全闭环时用作位置检测的还有光栅等。
它们的性能直接影响到伺服系统的性能。
旋转变压器是一种输出电压与角位移量成连续函数关系的感应式微电机。
从物理本质上看,旋转变压器是一种可以转动的变压器。
它由定子和转子组成,其原、副绕组分别放置在定、转子上,原、副绕组之间的电磁耦合程度与转子的转角有关。
因此,当它的原绕组施加单相交流电压励磁时,副绕组输出电压的幅值将与转子转角有关。
旋转变压器有多种分类方法:若按有无电刷来分,可分为接触式和无接触式两种;若按极对数来分,可分为单对极和多对极;若按用途来分,可分为计算用旋转变压器和数据传输用变压器;若按输出电压与转子转角间的函数关系来分,可分为正余弦旋转变压器、线性旋转变压器、比例式旋转变压器以及特殊函数旋转变压器等四类。
脉冲编码器也叫光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
这是目前在机床上应用最多的传感器,根据它产生脉冲方式的不同,可分为增量式、绝对式以及混合式三种。
其中增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90º,从而可方便地判断出旋转方向,而Z 相为每转一个脉冲,用于基准点定位。
它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。
其缺点是无法输出轴转动的绝对位置信息。
而绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。
它的特点是:①可以直接读出角度坐标的绝对值;②没有累积误差;③电源切除后位置信息不会丢失。
但是分辨率是由二进制的位数来决定的,也就是说精度取决于位数,目前有10位、14位等多种。
而混合式绝对值编码器,它输出两组信息:一组信息用于检测磁极位置,带有绝对信息功能;另一组则完全同增量式编码器的输出信息。
用于机床的位置测量并已得到广泛应用的有光栅、感应同步器、容栅、磁栅、球栅和激光。
编码器杂谈

日本多摩川公司是编码器的专业生产厂家 , 主要 生产旋转变压器 以及增量式 、 绝对式编码器 。 本文 以 日本多摩川公司的旋转变压器 、 增量式编码器和绝对
式编码器为例 , 逐一进行介绍 。
个脉 冲 ,故称为增量式 。多摩川公 司的增 量式编
码器输 出信号有长线输 出、开集输 出、 电压 输 出和 推拉互补输 出四种方式 。按机械 结构 分 ,有 中空轴
流 电压励磁时 ,输 出绕组 的电压幅值 与转 子转角成
绝 对 式 编 码 器
旋转 增量式编码器转 动时输 出脉冲 ,通 过 C U P 计数 可知其位 置 ,当编码器不动或停 电时,依靠计
正余弦函数关系 ,或保持某一 比例 关系,或在一定
转角范 围内与转 角成线性关系 。
数 设备的 内部记பைடு நூலகம்来记住位置 。这样 ,停 电后 ,编
编 码 器 发 展 历 史
早期编码器 主要是指旋转变压器 。 转变压器 旋
I 值高 ,能在 比较恶劣 的环境条件 下工作 。由于 电 P 磁干扰敏感 以及解码复杂等缺点 , 其逐渐退 出市场 , 但是时至今 日, 仍具有特有的价值 。 比如 , 在作为混 合动力汽车 的速度 反馈方面, 作用几乎是不可代替 其 的 此外, 在环 境恶劣的钢铁 行业、 水利水 电行业 , 因 为防护等级高 , 旋转变压器 同样获得 了广泛 的应用 。
维普资讯
R O B O T EC H T Nl
笪垒 叁
越 .
! 叁!!
技 术 摩 用
栏目 丰持
:
刘 远 江
编码器杂谈
[ 要 ] 本文简要介 绍 了E本 多摩 川编码器 、旋 转变压器 的应 用特 点和接 口方法 ,重点介绍 了产 品通 信 摘 t 协议 、硬件接 口电路 以及专用 的接 收芯片 A 5 6 U 5 1应用 方法 。
旋转变压器编码器的工作原理
旋转变压器编码器的工作原理
旋转变压器编码器的工作原理是基于电磁感应原理和变压器原理。
它是一种常见的传感器,用于测量和记录旋转物体的位置、速度和方向。
旋转变压器编码器由两部分组成:固定部分和旋转部分。
固定部分包括一个绕组和一个磁芯,而旋转部分包括一个磁头和一个磁环。
当旋转部分绕着固定部分旋转时,磁头和磁环之间的磁场会发生变化,从而在绕组中引起感应电动势的变化。
具体来说,当旋转部分转动时,磁头和磁环之间的距离会发生变化。
这会导致磁场的强度和方向在绕组中发生变化,进而引起感应电动势的变化。
感应电动势的大小和方向取决于旋转部分的位置和方向。
编码器通过测量感应电动势的变化来确定旋转物体的位置、速度和方向。
通常使用数字输出来表示这些信息。
编码器通常具有一个输出轴和一个编码盘,编码盘会根据旋转部分的位置和方向而旋转。
通过读取编码盘上的编码信号,可以确定旋转物体的具体位置及其旋转方向。
旋转变压器编码器具有很高的精度和可靠性,被广泛应用于自动控制系统、机器人、摄像机云台、工业机械等领域。
它在角度测量、位置反馈和控制系统中发挥着重要作用。
通过使用旋转变压器编码器,工程师可以实时监测和控制旋转物体的运动,从而提高系统的性能和效率。
编码器类型以及应用场合
编码器可以分为以下几种类型:
1.增量式编码器:在旋转时,输出的脉冲信号个数与转过的角度成正比,主
要用于测量旋转速度。
2.绝对值编码器:输出的是绝对位置值,即每个位置是唯一的,不存在误差,
适用于需要测量角度、位置、速度等参数的系统。
3.旋转变压器:是一种测量角度的绝对值编码器,测量精度高,抗抖动干扰
能力强,但同时也存在成本高、体积大、结构复杂、可靠性差等缺点。
4.正弦波编码器:输出的是正弦信号,其抗干扰能力比旋转变压器强,但其
精度和稳定性不如前者。
5.霍尔编码器:是一种光电编码器,具有体积小、重量轻、结构简单、可靠
性高、寿命长等优点,但同时也存在精度低、稳定性差等缺点。
编码器的应用场合如下:
1.速度检测:将编码器和电动机同轴联接,通过测量电动机的旋转速度,就
可以得到编码器的脉冲信号个数,从而计算出电动机的旋转速度。
2.位置控制:在生产线上,需要测量物体的位置,可以使用绝对值编码器来
测量物体的位置。
3.运动控制:在自动化设备中,需要精确控制物体的运动轨迹和运动速度,
可以使用编码器来测量物体的运动轨迹和速度。
4.旋转方向检测:在生产线上,需要检测物体的旋转方向,可以使用旋转变
压器来检测物体的旋转方向。
5.速度反馈:在自动化设备中,需要将物体的运动速度反馈到控制器中,可
以使用编码器来测量物体的运动速度并反馈到控制器中。
旋转变压器分类及接口电路
摘要:本文简要介绍编码器、旋转变压器应用特点和接口方法,其中重点介绍产品通信协议和硬件接口电路以及专用的接收芯片AU5561应用方法。
编码器发展历史早期的编码器主要是旋转变压器,旋转变压器IP值高,能在一些比较恶劣的环境条件下工作,虽然因为对电磁干扰敏感以及解码复杂等缺点而逐渐退出,但是时至今日,仍然有其特有的价值,比如作为混合动力汽车的速度反馈,几乎是不可代替的,此外在环境恶劣的钢铁行业、水利水电行业,旋转变压器因为其防护等级高同样获得了广泛的应用。
随着半导体技术的发展,后来便有霍尔传感器和光电编码器,霍尔传感器精度不高但价格便宜,而且不能耐高温,只适合用在一些低端场合,光电编码器正是由于克服了前面两种编码器的缺点而产生,它精度高,抗干扰能力强,接口简单使用方便因而获得了最广泛的应用。
编码器的生产厂家很多,这里以多摩川的产品为例进行介绍。
下面以旋转变压器、增量式编码器、绝对式编码器为例逐一进行介绍。
旋转变压器简称旋变是一种输出电压随转子转角变化的信号元件。
当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
按励磁方式分,多摩川旋转变压器分BRT和BRX两种,BRT是单相励磁两相输出;BRX是双相励磁单相输出。
用户往往选择BRT型的旋变,因为它易于解码。
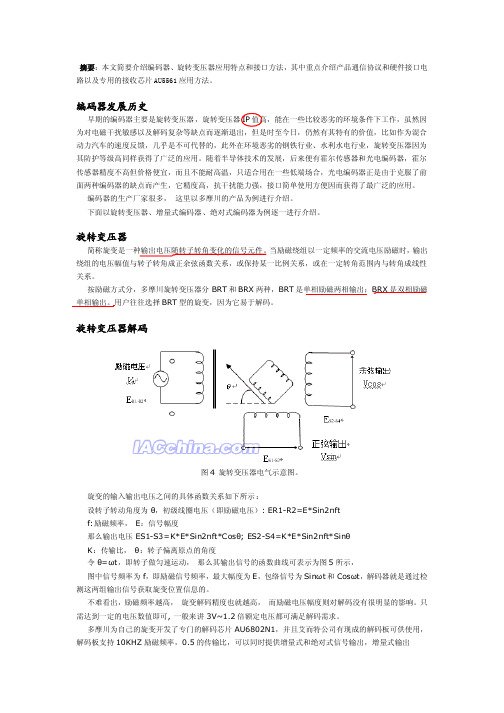
旋转变压器解码图4旋转变压器电气示意图。
旋变的输入输出电压之间的具体函数关系如下所示:设转子转动角度为θ,初级线圈电压(即励磁电压):ER1-R2=E*Sin2πftf:励磁频率,E:信号幅度那么输出电压ES1-S3=K*E*Sin2πft*Cosθ; ES2-S4=K*E*Sin2πft*SinθK:传输比, θ:转子偏离原点的角度令θ=ωt,即转子做匀速运动,那么其输出信号的函数曲线可表示为图5所示,图中信号频率为f,即励磁信号频率,最大幅度为E,包络信号为Sinωt和Cosωt,解码器就是通过检测这两组输出信号获取旋变位置信息的。
旋转变压器解码电路设计
2
Байду номын сангаас 2013 届本科毕业设计论文
目录
第一章 旋转变压器..................................................................................................5
1.2.1 环形变压器式旋转变压器................................................................................... 5 1.2.2 磁阻式旋转变压器............................................................................................... 6 1.3 正余弦旋转变压器的工作原理...................................................................................... 6 1.4 旋转变压器与光学编码器比较...................................................................................... 8 1.5 旋转变压器的应用.......................................................................................................... 9
第三章 控制器 STM32F103RBT6........................................................................ 14
旋变与海德汉的区别

电磁感应原理
直接输出时模拟信号,通过变频器或者我们的解码板出来是A、B信号
定转子分开装配,转子轴向压紧(用螺钉和压板),定子用压板压紧,上螺钉
1024*电机极对数,解码四倍频率后分辨率为4096*电机极对数
单价300-600
适用带reslover接口的变频器,例如国外的有德国科比变频器、意大利西威变频器、德国路斯特变频器等,国内的有蒙德变频器,汇川变频器等等。
产品
原理
输出信号
安装方式
分辨率
价格
适用变频
优点
缺点
海德汉光电编码器(1387、1313)
光栅理
正余弦信号
锥轴方式安装
1024、2048、4096、8192
单价1000-2000
适用带SIN/COS换向信号接口的变频器
记录绝对位置信息,没有累积误差,切除电源后信号不会丢失,高分辨率
恶劣环境下,很容易损坏,不防尘,不防油污,抗振动能力较差,耐温性较差
无刷、无接触,记录相对绝对位置,没有累积误差,切除电源后信号不会丢失,高分辨率、高可靠性,耐高低温,防油污、防尘,抗振动,抗强电磁干扰等
安装不方便,旋变解码卡不好配
旋转变压器与海德汉1387、1313光电编码器的区别
旋变变压器编码器原理
旋变变压器编码器原理
旋变变压器编码器是一种利用旋变变压器实现旋转角度测量的装置。
其原理如下:
1. 旋变变压器是一种特殊的变压器,其一般由一个固定铁芯和一个旋转铁芯组成。
固定铁芯绕制有一组绕组,而旋转铁芯则绕制有另外一组绕组。
2. 当旋转铁芯相对于固定铁芯旋转时,两组绕组之间的磁链的耦合程度会发生改变,从而导致输出电压的变化。
3. 编码器一般通过输入电压和输出电压之间的变化关系,来确定旋转角度。
通过对输出电压进行采样和处理,可以得到旋转铁芯的角度信息。
4. 通常,编码器还会有一个信号处理器,用于处理和解码输出信号,以得到更加精确的旋转角度。
总结起来,旋变变压器编码器利用旋变变压器的磁链耦合变化原理,通过对输出电压的采样和处理,来确定旋转角度信息。
这种编码器具有结构简单、精度高等优点,广泛应用于机械、电子等领域中需要测量旋转角度的场合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
旋转变压器与编码器的区
别
The Standardization Office was revised on the afternoon of December 13, 2020
从原理上讲,旋转变压器是采用电磁感应原理工作,随着旋转变压器的转子和
定子角位置不同,输出信号可以实现对输入正弦载波信号的相位变换和幅值调
制,最终由专用的信号处理电路或者某些具备一定功能接口的DSP和单片机,
根据输出信号的幅值和相位与正弦载波信号的关系,解析出转子和定子间的角
位置关系。
旋转变压器有单对极和多对极之分,n对极的又被习惯地称为n倍速。
在一个
极对的角度范围内(单对极就是一整圈),旋转变压器信号经处理后的结果一
般都具有反映绝对位置的特性,即可反映当前角位置是处于0~360度(电角
度)中的多少度上。
目前商用分辨率可以做到2的12次方以上,直至2的16
次方,再高就比较困难了。
典型的旋转变压器本体由硅钢片和漆包线构成,不包含任何电子元件,因而抗
震能力和温度特性极佳,因而其抗恶劣环境的工作能力远胜于普通旋转编码
器,在军工产品中具有广泛应用。
典型的旋转编码器采用光栅原理,用光电方法进行角位置检测,又可分为增量
式和绝对式等类型.
旋转变压器
简称旋变,是一种输出电压随转子转角变化的信号元件。
当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
按励磁方式分,多摩川旋转变压器分BRT和BRX两种,BRT是单相励磁两相输出;BRX是双相励磁单相输出。
用户往往选择BRT型的旋变,因为它易于解码。
有增量型和绝对型
增量型只是测角位移(间接为角速度)增量,以前一时刻为基点.而绝对型测从开始工作后角位移量.
增量型测小角度准,大角度有累积误差
绝对型测小角度相对不准,但大角度无累积误差
说简单点的编码器更精确采用的是脉冲计数
旋转变压器就不是脉冲技术而是模拟量反馈
据我所知区别如下: 1、编码器多是方波输出的,旋变是正余弦的,通过芯片解算出相位差。
2、旋变的转速比较高,可以达到上万转,编码器就没那么高了。
3、旋变的应用环境温度是-55到+155,编码器是-10到+70。
4、旋变一般是增量的。
根本区别在于:数字信号和模拟正弦或余弦信号的的区别。
resolver 有2组信号,可以分别处理成增量信号和绝对值型号。
今后会越来越多地得到推广使用。