直流电动机建模与仿真实验
一种基于Matlab的无刷直流电机控制系统建模仿真方法

一种基于Matlab的无刷直流电机控制系统建模仿真方法一、本文概述无刷直流电机(Brushless DC Motor, BLDC)以其高效率、低噪音、长寿命等优点,在航空航天、电动汽车、家用电器等领域得到广泛应用。
为了对无刷直流电机控制系统进行性能分析和优化,需要建立精确的数学模型并进行仿真研究。
Matlab作为一种强大的数学计算和仿真软件,为无刷直流电机控制系统的建模仿真提供了有力支持。
二、无刷直流电机控制系统原理1、无刷直流电机基本结构和工作原理无刷直流电机(Brushless Direct Current Motor,简称BLDCM)是一种基于电子换向技术的直流电机,其特点在于去除了传统直流电机中的机械换向器和电刷,从而提高了电机的运行效率和可靠性。
无刷直流电机主要由电机本体、电子换向器和功率驱动器三部分组成。
电机本体通常采用三相星形或三角形接法,其定子上分布有多个电磁铁(也称为线圈),而转子上则安装有永磁体。
当电机通电时,定子上的电磁铁会产生磁场,与转子上的永磁体产生相互作用力,从而驱动转子旋转。
电子换向器是无刷直流电机的核心部分,通常由霍尔传感器和控制器组成。
霍尔传感器安装在电机本体的定子附近,用于检测转子位置,并将位置信息传递给控制器。
控制器则根据霍尔传感器提供的位置信息,控制功率驱动器对定子上的电磁铁进行通电,从而实现电机的电子换向。
功率驱动器负责将控制器的控制信号转换为实际的电流,驱动定子上的电磁铁工作。
功率驱动器通常采用三相全桥驱动电路,具有输出电流大、驱动能力强等特点。
无刷直流电机的工作原理可以简单概括为:控制器根据霍尔传感器检测到的转子位置信息,控制功率驱动器对定子上的电磁铁进行通电,产生磁场并驱动转子旋转;随着转子的旋转,霍尔传感器不断检测新的转子位置信息,控制器根据这些信息实时调整电磁铁的通电状态,从而保持电机的连续稳定运行。
由于无刷直流电机采用电子换向技术,避免了传统直流电机中机械换向器和电刷的磨损和故障,因此具有更高的运行效率和更长的使用寿命。
无刷直流电动机系统建模与仿真

动机 控制 系统 的仿 真 模 型 来 验算 各 种 控 制 算 法 , 优 化整 个 系统 , 以在短 时 间 内设计 出 预期 效 果 的控 可 制 系统 。使 用 SmP w r y tms模 块 建 立仿 真 模 i o eS se 型, 从原理 上 容易 理解 , 避免 繁 琐 的编 程 过 程 , 能 但 其运行 速度 太慢 , 响其 实用 价 值 。本 文 采 用 Sm— 影 i
快速 性 和可 靠性 。
关键 词 : 流无刷 电机 ; i l k 数 学 模 型 ; 直 Smui ; n 建 模仿 真
中 图分类号 : P 9 . T 3 19
文献标 识码 : A
1 永磁 无 刷 直 流 电动 机 数 学模 型
文章编 号 : 0 1— 2 7 2 0 ) 1 0 5 —O 10 2 5 (08 1 — 0 l 3
S UN Xi—t ng, A NG o W Yu— c 。 aiYA N e W i
( l g fM a i e En i e rn , r h s e n P l t c n c l n v r iy Xi a 1 0 2, h n ) Col e o rn g n e i g No t we t r o y e h ia i e s t , ’ n 7 0 7 C i a e U
无刷直 流 电动机 系统建模 与仿真
孙 希通 , 育 才 , 王 严 卫
( 西北 工业 大 学航 海 学 院, 西 西安 7 0 7 ) 陕 1 0 2
M o eig a d S mu a in o h d l n i lt ft eBLDC M o o n r l y tm n o t rCo to se S
Ab ta t s r c :Ba e o m a h ma ia mo e o sd n t e tc l dl f
无刷直流电机的建模与仿真
无刷直流电机的建模与仿真摘要:该文在分析无刷直流电机(bldcm)数学模型和工作原理的基础上,利用matlab软件的simulink和psb模块,搭建无刷直流电机及整个控制系统的仿真模型。
该bldcm控制系统的构建采用双闭环控制方法,其中的电流环采用滞环电流跟踪pwm,速度环采用pi控制。
仿真和试验分析结果证明了本文所采用方法的有效性,同时也证明了验证其他电机控制算法合理性的适用性,为实际电机控制系统的设计和调试提供了新的思路。
关键词:bldcm控制系统;无刷直流电机;数学模型;matlab;电流滞环中图分类号: tp391 文献标识码:a 文章编号:1009-3044(2013)05-1172-03随着现代科技的不断发展,无刷直流电动机应用技术越发成熟,应用领域也越发广泛,用户对无刷直流电动机使用增多的同时,对其控制系统的设计要求也变得越来越高。
包括低廉的设计和搭建成本、短的开发周期、合适的控制算法、优良的控制性能等。
而科学合理的无刷直流电动机控制系统仿真模型的建立,对控制系统的直观分析、具体设计,快速检验控制算法,降低直流电机控制系统的设计成本,拥有十分重要的意义。
直流无刷电动机利用电子换向原理和高磁性材料,取代了传统的机械换相器和机械电刷,解决了有刷直流电动机换向器可维护性差和较差的可靠性的致命缺点,使得直流电动机的良好控制性能得到维持,直流电动机得到更好的应用。
伴随着如今功率集成电路技术和微电子技术的发展,控制领域相继出现了大量无刷直流电动机专用驱动和控制芯片,解决高性能无刷电动机驱动控制问题所提出的解决方案也变得更加丰富和科学,无刷直流电机在控制领域显示出前所未有的广阔应用前景[1]。
通过无刷直流电动机控制系统的仿真模型来检验各种控制算法,优化整个控制系统的方法,可以在短时间内得到能够达到预期效果的控制系统。
在对无刷直流电机电流滞环控制和数学模型等分析的基础之上,可以利用simulink中所提供的各种模块,构建出bldcm 控制系统的仿真模型,从而实现只利用simulink中的模块建立bldcm控制系统仿真模型。
开环直流调速系统的动态建模与仿真
电控学院运动控制系统仿真课程设计院(系):电气与控制工程学院专业班级:姓名:学号:开环直流调速系统的动态建模与仿真摘要:MATLAB仿真在科学研究中的地位越来越高,如何利用MATLAB仿真出理想的结果,关键在于如何准确的选择MATLAB的仿真。
本文就简单的开环直流调速系统的MATLAB仿真这个例子,通过对MATLAB的仿真,得到不同的仿真结果。
通过仿真结果的对比,对MATLAB的仿真进行研究。
从而总结出如何在仿真过程中对MATLAB的仿真做到最优选择。
详细介绍了用MATLAB语言对《电机与拖动》中直流电动机调速仿真实验的仿真方法和模型建立。
其仿真结果与理论分析一致,表明仿真是可信的,可以替代部分实物实验。
首先在分析直流调速系统原理的基础上, 介绍了基于数学模型的仿真, 在仿真中可灵活调节相关参数, 优化参数设计。
其次完成了基于系统框图, 并分析了调速系统的抗干扰能力。
采用工程设计方法对开环直流调速系统进行设计,选择调节器结构,进行参数的计算和校验;给出系统动态结构图,建立起动、抗负载扰动的MATLAB 仿真模型。
分析系统起动的转速和电流的仿真波形,并进行调试,使开环直流调速系统趋于合理与完善。
1.1课题背景直流调速是现代电力拖动自动控制系统中发展较早的技术。
在20世纪60年代,随着晶闸管的出现,现代电力电子和控制理论、计算机的结合促进了电力传动控制技术研究和应用的繁荣。
晶闸管-直流电动机调速系统为现代工业提供了高效、高性能的动力。
尽管目前交流调速的迅速发展,交流调速技术越趋成熟,以及交流电动机的经济性和易维护性,使交流调速广泛受到用户的欢迎。
但是直流电动机调速系统以其优良的调速性能仍有广阔的市场,并且建立在反馈控制理论基础上的直流调速原理也是交流调速控制的基础。
现在的直流和交流调速装置都是数字化的,使用的芯片和软件各有特点,但基本控制原理有其共性。
长期以来,仿真领域的研究重点是仿真模型的建立这一环节上,即在系统模型建立以后要设计一种算法。
无刷直流电机PWM调速控制系统的建模与仿真
数 控 技 术
30 00
厂
2 0 50 2 0 0 010 5 0
,- . \ .
i
弓
5
J
蜱 lo O0
50 0
0 0
f f l
0. O1 0. 2 O 0. 3 0 00 .4 0. 5 0
II啊 - I_— _ 一 帅 刚 . I 一 . 啪- - I I I . - I洲 I _
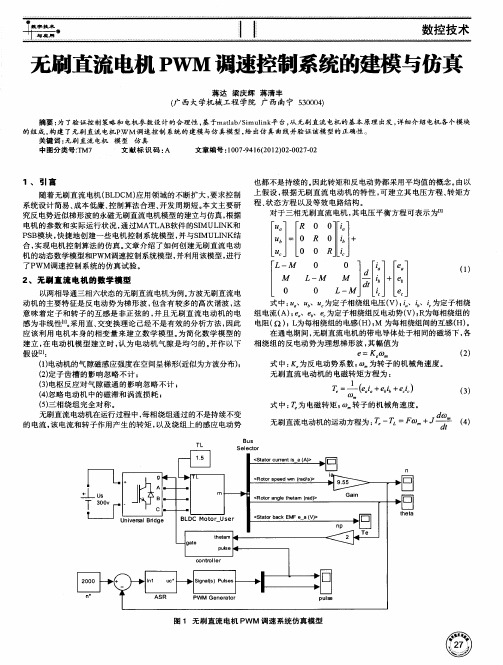
2、无 捌 直 流 电机 的 数 学 模 型
以两 相 导 通 三 相 六状 态 的 无 刷 直流 电机 为 例 。 波 无 刷直 流 电 方 动机的主要特征是反 电动势为梯形波 , 包含有 较多 的高 次谐 波 , 这 意 味 着 定 子 和 转 子 的 互 感 是 非 正 弦 的 , 且 无 刷 直 流 电 动 机 的 电 并 感 为非线性【 采用 直、 l 1 。 交变换理论 己经不是有 效的分析方法 , 因此 应 该 利 用 电机 本 身 的 相 变 量 来 建 立 数 学 模 型 。 简 化 数 学 模 型 的 为 建立 , 电动 机模型建立 时 , 在 认为 电动机 气隙 是均匀的 。 并作 以下 假设【. 2 J () 1电动机 的气 隙磁感应强度在空 间呈梯形( 近似为方波分布) ; () 子齿槽的影 响忽 略不计 ; 2定 () 3 电枢 反 应 对 气 隙磁 通 的 影 响 忽 略 不 计 ; () 略 电 动 机 中 的磁 滞 和 涡 流 损 耗 ; 4忽 () 相 绕 组 完 全 对 称 。 5三 无刷直流 电动机在运行过程 中, 每相绕组通过的不是持续不变 的 电流 , 电流和转子作用产生 的转 矩 , 该 以及绕组上 的感 应电动 势
- - 一J - 一
0. 3 0 0. 4 0 0. 5 0
直流电机的建模与仿真
转速n
电机双闭环调整系统的动态结构图
动态结构图
nc
kp
kd
PWM
u
电机
dn
n
电机系统的建模
一、电动机系统的数学模型
1、列些状态空间空间模型 选取参数分别为 L,R i , K R , J, Ki , K n
输入变量为U,状态变量为n、i 系统的状态空间模型为:
di ( Ri i K R n U) / L dt J dn K i K n 2 i n dt
电机系统的仿真
MATLAB仿真的源程序: function dj() dt=0.02/6; x=[0;0]; y=x; t=0; nc=1000; for i=1:2000 t=[t i*dt]; x=x+(dt*fx(x,nc))'; y=[y,x]; end figure plot(t,y,'LineWidth',2);
function [dx]=fx(x,nc) L=1.5; J=0.25; kr=0.4; Ri=0.2; ki=2.2; kn=0.00015; u=220; kp=4; kd=7; i=x(1); n=x(2);
x=[i,n]'; dn=(ki*i-kn*n^2)/J; du=kd*(kp*(nc-n)-dn); di=-(Ri*i+kr*n-du)/L; Uc=du; if(Uc>0) Uc=u; end if(Uc<0) Uc=0; end dx(1)=di; dx(2)=dn;
电机转速的动态仿真曲线
仿真曲线图
电机转速的动态特性总结
通过电机的状空间数学模型以及电机的MATLAB仿真图形, 我们可以知道: 电机启动时电流迅速增大,达到最大值后又下降,当转速上 升到给定的转速时,电流值趋于稳定,不再发生变化,同时电机的 转速也达到稳定。
电动汽车用无刷直流电动机模糊控制系统的建模与仿真

络进 程 的必 经之 路 。本文提 出的建设 思路 和策 略对 TD — L T E室 内分布 系统规 划建 设具有 重要 的指 导意
义。
作者简介 : 陈永 安 ( 1 9 9 4 一 ) , 男, 本科 , 主要 从 事 通 信 工 程 等 方
面 的研 究 。 收 稿 日期 : 2 0 1 3 年 O 1月 0 4日
差, 存在超 调 , 达不 到高 性 能和 高精 度 的要 求_ _ 2 J 。考 虑到模糊控 制器具有快速性 、 稳 定性和鲁 棒性强 等优 点, 所 以采 用 了模 糊 控制 策略 。文献 1 - 3 3 利用 模 糊逻
辑控制器 调节 P I D各 参数 , 达 到 了模 糊控 制 的 目的 ;
0
0 ]
0 l
d £
l ld 6
d £
( 1 )
图 2 电压 平 衡 方 程 等 效 模 块
L—M l
d
d
2 . 2 反 电 动 势 模 块
2 . 1 电压平 衡方 程等 效模块 。
根据 式 1 , 得到 B L D C M 的 电压 平 衡 方 程 的 等 效模 型 , 如 图 2所示 , “ 。、 “ 、 “ 为三 相绕 组 的端 电
压; e 、 、 e 为 三相 绕 组 上 产生 的反 电动 势 ; i 。、
t e r f e r e nc e a bi l i t y a nd s o o n,w h i c h ma ke t h e s y s t e m ha s t h e be t t e r c o nt r o l a bi l i t y.
但模糊逻 辑规则数 和计算 量大 , 控制器 的实 时性难 以
(完整版)直流电动机建模及仿真实验
动态系统建模仿真实验报告姓名:学号:联系方式:(Tel)(Email)2010年11月11日目录1直流电动机建模及仿真实验 (1)1.1实验目的 .............................................................................................................. 1 1.2实验设备 .............................................................................................................. 1 1.3实验原理及实验要求 .......................................................................................... 1 1.3.1实验原理 ....................................................................................................... 1 1.3.2实验要求 ....................................................................................................... 2 1.4实验内容及步骤 .................................................................................................. 3 1.4.1求电动机的传递函数模型和频率特性 ....................................................... 3 1.4.2设计Simulink 框图求电机的调速特性 ....................................................... 5 1.4.3设计Simulink 框图求电机的机械特性 ....................................................... 7 1.4.4求电机转速的阶跃响应和机电时间常数 ................................................... 8 1.5实验结果分析 . (10)2考虑结构刚度时的直流电动机-负载建模及仿真实验 (11)2.1实验目的 ............................................................................................................ 11 2.2实验设备 ............................................................................................................ 11 2.3实验原理及实验要求 ........................................................................................ 11 2.3.1实验原理 ..................................................................................................... 11 2.3.2实验要求 ..................................................................................................... 13 2.4实验内容及步骤 ................................................................................................ 13 2.4.1求从a u 到m θ的传递函数模型和频率特性 ................................................ 13 2.4.2求从m θ到L θ的传递函数模型、频率特性和根轨迹 ............................... 15 2.4.3求不同刚度系数对应的从a u 到L θ的电机-负载模型的频率特性 ........... 17 2.5实验结果分析 . (18)1直流电动机建模及仿真实验1.1实验目的(1)了解直流电动机的工作原理; (2)了解直流电动机的技术指标; (3)掌握直流电动机的建模及分析方法;(4)学习计算直流电动机频率特性及时域响应的方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《直流电动机建模及仿真实验》
—实验报告
院(系) 3 系
姓名 ******
学号 *********
任课教师王卫红
2013年 11月 6日
直流电动机建模及仿真实验
1实验目的
了解直流电动机的工作原理; 了解直流电动机的技术指标; 掌握直流电动机的建模及分析方法;
学习计算直流电动机频率特性及时域响应的方法。
2实验设备
(1)硬件:PC 机。
(2)工具软件:操作系统:Windows 系列;软件工具:MATLAB 及simulink 。
3实验原理
原理框图:
直流电机电枢回路的电路方程是:
dt
di
L
iRa E u a +=- 其中,u a 是加到电机两端的电压,E 是电机反电势,i 是电枢电流,R a 是电枢回路总电阻,
L 是电枢回路总电感,Ra
La
T l =
称为电枢回路电磁时间常数。
并且反电动势E 与电机角速度m ω成正比:
m
e m e k k E θω == 其中ke 称为反电势系数,m θ为电机轴的转角。
对于电机而言,其转动轴上的力矩方程为:
m
m m m l m J J M i k θω ==- 其中km 是电机的力矩系数,l M 是负载力矩,J 是电机电枢的转动惯量。
进行拉式变换得到:
⎪⎩⎪⎨⎧=-=+=-s
s J M s I k s k s E s s I T s I Ra s E s Ua m m l m m e l )()()()()
)()(()()(θθ
由此方程组可以得到相应的电动机数学模型的结构框图:
图4.1直流电动机数学模型结构框图
实验要求:
(1)根据电机的工作原理(电压平衡方程、力矩平衡方程)建立从电枢电压a u 到转速m θ 的
传递函数模型,并根据表1所给电机参数求其频率特性。
表1共给出了两个电机的参数,其中A 为大功率电机,B 为小电机。
(2)编制MATLAB 或simulink 程序求电机的调速特性,即不同负载力矩情况下电压和转速
之间的关系,将数据填入表2和表3。
(提示:由于调速特性是电机的静态特性,故可先推导出考虑负载力矩情况下电枢电压Ua 与转速m θ 之间的静态模型,然后再仿真。
) (3)编制MATLAB 或simulink 程序求电机的机械特性,即不同电压情况下负载力矩和转速
之间的关系。
(提示:在仿真时可将电枢电压固定,改变负载力矩的值,即可求出M l 与转速m θ 之间的关系。
)
(4)编制MATLAB 或simulink 程序求电机转速的阶跃响应,并根据阶跃响应求出其机电时
间常数。
(提示:由于电机的电磁时间常数较小,故可将电压Ua 与转速m θ 之间的动态响应看作非周期环节,所以能够从其阶跃响应求出机电时间常数。
)
表1 电机参数表
4 实验步骤
(1) 根据图4.1可求得传递函数
()()()1111a m
m a l a l m e m a l m e m
R T s k U M R T s J s k k R T s J s k k θ+=-+⋅++⋅+
假定干扰为0,可求得输入输出传递函数
()()
()
()1m m
a a l m e m
s k G s U s R T s J s k k θ=
=
+⋅+
带入数据可求得0.0043750a
l a
L T R =
=≈ 在后边建模模型的时候可以将其取0 带入A 电机数据求得()2
46.32
0.0105 2.42561.496
A G s s s =
++ 带入B 电机数据可求得()423
0.27
1.0510 6.75100.1134
B G s s s --=⨯+⨯+ 用matlab 的bode 指令可以得到两电机的频率响应
A 电机的频率响应图
B 电机的频率响应图
(2) 在simulink 中搭建系统的框图如下
M a g n i t u d e (d B )10
10
10
10
P h a s e (d e g )
Frequency (rad/sec)
M a g n i t u d e (d B )10
10
10
10
P h a s e (d e g )
B 电机的频率响应波特图
Frequency (rad/sec)
A电机系统simulink仿真图
可求得
表2 电机A调速特性表
同理可得到B电机的调速特性
表3 电机B调速特性表
(3) 对于电机B 测得固定电压,改变负载得到如下数据(转速表)
将其画到图标中可得电机B 的机械特性图
负载力矩
转速
电机B 的机械特性
用同样的方法和原理可以求得大电机A 的机械特性,测得数据表如下。
可得其机械特性图如下
(4) 根据阶跃响应求出电机的时间常数 a.同理对于电机A ,其阶跃响应图像如下图
时间t
转速
由图可见,阶跃响应波动较大,其电磁时间常数34.375100a
l a
L T R -==⨯≈很小,将其忽略,求得时间常数0.0094T s = 。
b.对于电机B ,其阶跃响应图像如下图
由于电机的电磁时间常数31.6100a
l a
L T R -=
=⨯≈ 可以忽略,所以可以将该系统看做一个一阶环节。
所以取稳态值的0.632对应的t 作为时间常数,通过matlab 易求得
0.0590T s =
6 实验结果及分析
本次实验结果都比较符合电机的基本特性,其中A 电机对应的是大电机,而B 电机对应的较小的电机。
本次实验结果较好地体现了两者的特性。
通过本次实验,了解直流电动机的工作原理;直流电动机的技术指标;掌握了直流电动机的建模及分析方法;学习了计算直流电动机频率特性及时域响应的方法。
受益匪浅。
时间t
转速
B 电机的阶跃响应图。