制动系统建模、仿真及ABS控制器设计word版本
车辆制动建模设计方案模板

车辆制动建模设计方案模板一、背景分析车辆制动系统是汽车整车的重要部分,是控制车辆减速和停车的重要手段。
因此,对于车辆制动系统的设计和优化,尤其是对制动系统的建模,已成为众多汽车企业所重视的领域。
本文将介绍一种车辆制动建模设计方案模板,以供相关企业和研究单位参考。
二、建模方法1.建模目标本方案的建模目标是,通过建立简单的车辆制动系统模型,研究制动系统在不同工况下的性能指标,如刹车距离、制动力、刹车时间等。
2.建模步骤• 1.建立系统框架:首先需要确定车辆制动系统的整体框架和组成部分,包括制动器、制动管路、软管、制动总泵等。
• 2.建立物理模型:确定建模使用的工具和模型,例如MATLAB/Simulink等工具和物理模型。
• 3.输入和输出信号确定:制动系统的输入信号包括制动踏板角度、车速等,输出信号包括刹车距离、制动力、刹车时间等。
• 4.建立系统控制模型:建立车辆制动系统控制模型,确定控制策略和控制算法。
• 5.参数标定和仿真:根据实验数据和模型仿真结果,进行参数标定和优化,得到准确的模型预测性能。
3.建模要求• 1.模型简单易懂:模型建立需要尽量简单易懂,这样有利于理解和应用。
• 2.数据准确性高:建模需要严格遵循数据准确性,避免使用过程中出现错误。
• 3.灵活性强:模型的设计需要具有一定的灵活性,可以根据实际需求进行调整和优化。
• 4.实用性强:模型需要具有一定的实用性,可以应用于实际的工程设计和研究中。
三、模型应用基于上述建模方法和要求,可得出一套完整的车辆制动建模设计方案,适用于不同车型制动系统的研究和设计。
1.实验仿真通过建立的模型,可以进行不同工况下的实验仿真,得到相应的制动性能数据,如刹车距离和刹车时间等。
2.制动系统优化设计在相应实验和仿真数据的基础上,可以进行制动系统的优化设计,包括组成部分和参数设置等,以获得更加优化的制动性能。
3.工程应用通过对制动系统建模的掌握和优化,可以应用于实际的汽车工程设计中,提高车辆的制动性能和安全性。
轿车制动系建模与仿真及ABS控制策略

关键词:制动力分配,制动性能仿真,实验,ABS 控制策略
第
I
页
上海交通大学硕士学位论文
ABSTRACT
MODELING AND SIMULATION OF AUTOCAR BRAKING SYSTEM AND ABS CONTROL STRATEGY
ABSTRACT
At first, this thesis analyzed the braking system theoretically, working principle and characteristic of braking force regulate fitting was expounded. Second,based on analysis, this thesis presents the braking force distribution rationality evaluation mathematics model and the braking performance computer simulation mathematics model. Then, a computer program was designed based on the mathematics model. The program is built by Matlab. The computer program can improve the design efficiency and made them achieve the optimal project. In this thesis, with the program, the braking force distribution of the Haiyiu-MB autocar was rationality evaluated and the braking performance of the autocar was simulation calculated. At the same time, the result was testified by some tests. Finally, this thesis describes the fundamental principle of ABS controlling and discuss several control methods of ABS in common use, emphasis on the logic gate control. In brief, the study of this thesis is directive and practical for the design of the autocar braking system. Keywords: braking force distribution, braking performance simulation, Test, Anti-lock brake controlling.
基于MATLAB的汽车ABS制动过程仿真

基于MATLAB的汽车ABS制动过程仿真ABS(Anti-lock Braking System,防抱死制动系统)是现代汽车上保证行车安全的重要制动系统之一。
ABS制动系统可以避免在制动时车轮抱死,从而提高了制动效果和稳定性。
为了深入理解ABS制动系统的工作原理和性能,本文将基于MATLAB软件进行汽车ABS制动过程的仿真。
一、建立模型和假设为了实现ABS制动过程的仿真,需要建立一个基于MATLAB 的系统模型。
该系统模型需要考虑以下几个方面:1. 汽车的运动方程。
2. 轮胎与地面的接触力,即摩擦力。
3. 制动器与车轮的接触力。
4. ABS控制器的控制策略。
在仿真过程中,假设车辆在制动前以一定的速度匀速行驶,制动时四个车轮的制动和抱死状态是相同的。
二、模型搭建在MATLAB界面中,首先利用simulink模块搭建模型。
模型如下:模型中包含了车辆运动方程、轮胎地面接触力、制动器与车轮接触力等模块。
其中,运动方程模块利用F=ma公式进行建模,轮胎地面接触力模块利用摩擦力系数进行计算,制动器与车轮接触力模块利用摩擦力系数和制动器力矩进行计算。
在模型中,还有制动器控制器模块,负责制动器的控制与调节。
制动器控制器可以采用PID算法或滑模控制算法来控制制动器的开闭和力矩大小。
三、仿真过程在进行仿真过程中,需要确定以下参数:1. 初始车速度v0=80km/h。
2. 初始刹车踏板角度θ=0。
3. 制动器摩擦力系数μs=0.7。
4. 刹车片初期转动半径r=0.05m。
在进行仿真操作前,应先在程序中设定好各参数,再设定仿真时间和仿真步长。
由于ABS制动过程会使用到控制器,因此应首先进行控制器的设计和仿真。
在此,控制器的设计采用滑模控制器,其仿真结果如下:控制器的仿真结果显示,在刹车操作开始10s后,滑模控制器调节出的制动器力矩逐渐增加并稳定于85N·m左右。
随着控制器的调节,车轮抱死现象得以解决、保持ABS制动状态下使车辆具备更好的稳定性和制动效果。
汽车制动控制系统ABSEBD设计与仿真

第28卷第2期2020年6月山东交通学院学报JOURNAL OF SHANDONG JIAOTONG UNIVERSITYVol.28No.2Jun.2020DOI:10.3969/j.issn.1672-0032.2020.02.001汽车制动控制系统ADS/EDD设计与仿真王健>,杨君>,于蓬2!,郑金凤21.山东交通学院汽车工程学院,山东济南250357;2.山东明宇新能源技术有限公司,山东济南271100摘要:为提高汽车的制动性能,采用汽车防抱死制动系统(anti-locked braking system,ADS)与电子制动力分配(electronis brake force distribution,EBD)系统联合控制制动系统的方法。
设计基于滑模控制的ADS和基于模糊控制的EBD系统。
分别在干、湿沥青路面2种条件下对ABS/EBD系统进行仿真分析。
结果表明:设计的ABS/ EDD控制系统能充分利用ABS和EBD的优点,大大提高汽车的制动效能。
关键词:ABS/EBD;滑模控制器;模糊控制器;滑移率中图分类号:U463.5文献标志码:A文章编号:1672-0032(2020)02-0001-08引用格式:王健,杨君,于蓬,等.汽车制动控制系统ABS/EBD设计与仿真[J].山东交通学院学报,2020,28(2): 1-8.WANG Jian,YANG Jun,YU Peng,et aO.ABS/EBD design and simulation of automotive brake controO system[J].JournaS of Shandong Jiaotong University,2020,28(2):1-8.0引言汽车紧急制动,特别是在附着系数较低的路面上紧急制动时,汽车防抱死制动系统(anti-locked braking system,ABS)可以防止前后车轮抱死拖滑,在保证汽车具有转向功能的同时,防止汽车不发生甩尾侧滑等危险情况,保持汽车的制动稳定性,且可以缩短制动距离(1-)%电子制动力分配(electronic brake force distribution,EBD)系统作为ABS的子系统,可以在车辆制动时控制制动力在各轮间的分配,更好地利用各轮的附着系数[4-11]%国内大多数ABS采用逻辑门限值控制,通过大量试验确定各门限值,对系统的控制很不稳定[12-14]%本文ABS采用滑模变结构控制,该方法是针对非线性和参数不确定性系统的控制方法[15-17],具有很好的鲁棒性%EBD系统采用模糊控制,该方法对系统中的参数变化、外界干扰、系统非线性等具有很强的鲁棒性%通过建立1/2车辆动力学模型、设计基于滑模变结构控制的ABS控制器和基于模糊控制的EBD控制器,在不同路面上进行ABS/EBD系统的仿真验证,以期提高车辆的制动性能%1车辆动力学模型为了设计ABS&EBD控制器以及进行系统动力学仿真,需建立车辆动力学模型%为便于建模,对车辆收稿日期:2020-04-02基金项目:国家自然科学基金项目(61803231);山东省重点研发计划(2017GGX50109);山东交通运输厅科技计划(2018B66);山东省高等学校科技计划项目(J17KB024);山东省高等学校青创科技支持计划(2020KJJ002);山东交通学院博士科研启动资金资助项目(BS2017001)第一作者简介:王健(1986$),男,山东潍坊人,工学博士,副教授,主要研究方向为汽车智能驾驶、主动安全,E-mail:wangjian1987228@0*通信作者简介:于蓬(1986—),男,济南人,工学博士,高级工程师,主要研究方向为新能源汽车集成及产业化,E-mail:t_ y_yupeng@。
汽车ABS系统的建模与仿真

汽车ABS系统的建模与仿真基于Matlab/Simulink的汽车建模与仿真摘要本文所研究的是基于Matlab/Simulink的汽车防抱死刹车系统(ABS)的仿真方法,本方法是利用了Simulink所提供的模块建立了整车的动力学模型,轮胎模型,制动系统的模型和滑移率的计算模型,采用的控制方法是PID控制器,对建立的ABS的数学模型进行了仿真研究,得到了仿真的曲线,将仿真曲线与与没有安装ABS系统的制动效果进行对比。
根据建立的数学模型分析,得到ABS系统可靠,能达到预期的效果。
关键词ABS 仿真建模防抱死系统 PIDModeling and Simulation of ABS System of AutomobilesBased onMatlab/SimulinkAbstractA method for building a Simulator of ABS base on Matlab/Simulink is presented in this paper.The single wheel vehicle model was adopted as a research object in the paper. Mathematical models for an entire car, a bilinear tire model, a hydraulic brake model and a slip ratio calculation model were established in the Matlab/Simulink environment. The PID controller was designed. The established ABS mathematical model was simulated and researched and the simulation curves were obtained. The simulation results were compared with the results without ABS. The results show that established models were reliable and could achieve desirable brake control effects.Key wordsABS; control; modeling; simulation;Anti-lock Braking System;PID1.概述随着载重车辆动力性的不断提高,客观上也对车辆的制动性能与驱动性能提出了越来越高的要求。
ABS控制器设计及仿真
汽车ABS控制器设计及其仿真摘要:ABS(Anti-lock Braking System)防抱死制动系统,通过安装在车轮上的传感器发出车轮将被抱死的信号,控制器指令调节器降低该车轮制动缸的油压,减小制动力矩。
关键字:ABS 控制系统仿真一.ABS控制系统简介。
汽车制动性能主要是三个方面:⑴制动效能,即制动距离与制动减速度;⑵制动效能的恒定性,即摩擦材料的抗热衰性能;⑶制动时汽车的方向稳定性,即制动时汽车不发生跑偏、侧滑及失去转向性能。
汽车维持直线行驶或按预定弯道行驶的能力。
而制动性能主要是有汽车轮胎的制动性能决定的。
ABS系统是一种能防止车轮被抱死而导致车身失去控制的安全装置,全称防抱死刹车系统。
我们知道,当车轮抱死滑移时,车轮与路面间的侧向附着力将完全消失。
如果是前轮(转向轮)制动到抱死滑移而后轮还在滚动,汽车将失去转向能力(跑偏)。
如果是后轮制动到抱死而前轮还在滚动,即使受到不大的侧向干扰力,汽车也将产生侧滑(甩尾)现象。
这些都极容易造成严重的交通事故。
因此,汽车在制动时不希望车轮制动到抱死滑移,而是希望车轮制动到边滚边滑的运动状态。
从已有的实验中可以知道[1],如图1所示,汽车车轮的滑动率在15%-20%时,轮胎与路面有最大的纵向附着系数,此时侧向附着系数也较大,因此,为了充分发挥轮胎与路面间这种潜在的附着能力,目前的许多中高级轿车及大客车和重型货车上均装备了防抱死制动装置(Antilock Braking System),简称ABS.汽车电控防抱死制动系统的主要功用有:(1)在任何制动情况下驾驶员应能保持对行驶车辆的控制。
(2)在任何制动情况下应能保持汽车转向时的操纵性和制动时的稳定性。
(3)当左,右车轮处于不同附着系数路面或者路面附着系数突然变化时能够进行调整控制。
(4)能够缩短制动距离,提高汽车制动效能。
(5)制动噪声小,工作安全可靠,一但防抱死制动系统失效时,自检系统能显示报警,而由机械制动系统来承担汽车制动作用。
(完整word版)ABS仿真计算
1. 绘制轻型货车的动力性能曲线1.1要求:1) 绘制汽车驱动力与行驶阻力平衡图2) 求汽车最高车速、最大爬坡度及克服该坡度时相应的附着力 3) 绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2挡起步加速行驶至70km/h的车速—时间曲线,或者用计算机求汽车用2挡起步加速行驶至70km/h 的加速时间。
1.2轻型货车的有关数据;汽油发动机使用外特性的T q -n 曲线的拟合公式为T q =−19.313+295.27(n 1000)−165.44(n 1000)2+40.874(n 1000)3−3.8445(n 1000)4式中,T q 为发动机转矩(N •m );n 为发动机转速(r/min )。
发动机的最低转速n min =600r/min ,最高转速n max =4000r/min装载质量 2000kg 整车整备质量 1800kg 总质量 3880kg 车轮半径 0.367m传动系机械效率ηT 0.85滚动阻力系数ƒ=0.013空气阻力系数×迎风面积 C D A =2.77m 2 主减速器传动比 i 0=5.83飞轮转动质量 I f =0.218kg ∙m 2 二前轮转动惯量 I w1=1.789kg ∙m 2 四后轮转动惯量 I w2=3.598kg ∙m 2 变速器传动比i g (数据如下表)1挡 2挡 3挡 4挡 5挡轴距L=3.2m 质心至前轴距离(满载) a=1.947m 质心高(满载)ℎg =0.9m汽车动力性公式为:F t =T tq i g i 0ηTru a =0.377rnig i 0ΣF =F f +F w +F i +F j式中:F t为车轮驱动力;u a为汽车行驶速度(km/h);n为发动机转速(r/min);r 为车轮半径(m);i g为变速器传动比;i0为主减速器传动比。
1.3根据以上公式和要求写M文件:1.3.1驱动力与行驶阻力平衡图、最高车速、最大爬坡度及克服该坡度时相应附着力的M 文件clear % 清除变量clc %清屏n_min=600; %发动机的最低转速n_max=4000; %发动机的最高转速m=3880; %总质量r=0.367; %车轮半径nt=0.85; %传动系机械效率f=0.013; %滚动阻力系数CDA=2.77; %空气阻力系数×迎风面积i0=5.83; %主减速器传动比If=0.218; %飞轮转动惯量Iw1=1.798; %二前轮转动惯量Iw2=3.598; %四后轮转动惯量L=3.2; %轴距a=1.947; %质心至前轴距离(满载)hg=0.9; %质心高(满载)%ig=[6.09 3.09 1.71 1]; %四档变速器传动比ig=[5.56 2.769 1.644 1 0.793];%五档变速器传动比%%%%%%%%%%%%绘制汽车驱动力与行驶阻力平衡图%%%%%%%%%%%%%%%%%for i=1:length(ig)u_min=0.377*n_min*r/ig(i)/i0;%计算最低车速u_max=0.377*n_max*r/ig(i)/i0;%计算最高车速for u=u_min:0.1:u_max %汽车速度运行范围n=u*ig(i)*i0/r/0.377; %发动机转速与汽车行驶速度之间的关系Ttq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;%汽油发动机使用外特性的T_q-n曲线的拟合公式Ft=Ttq*ig(i)*i0*nt/r; %汽车驱动力plot(u,Ft) %输出(u,Ft)曲线图hold onendendtitle('汽车驱动力—行驶阻力平衡图')xlabel('汽车行驶速度(km/h)')ylabel('汽车驱动力(kN)')u=0:0.1:u_max;Ff=m*9.8*f+CDA*u.^2/21.15; %汽车行驶阻力plot(u,Ff) %输出plot(u,Ff)曲线图%%%%%%%%%%%%%%%%%求汽车最高车速%%%%%%%%%%%%%%%%%%%%for u=u_min:u_maxn=u*ig(i)*i0/r/0.377;%发动机转速与汽车行驶速度之间的关系Ttq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;%汽油发动机使用外特性的T_q-n曲线的拟合公式Ft=Ttq*ig(i)*i0*nt/r; %汽车驱动力Ff=m*9.8*f+CDA*u^2/21.15; %汽车行驶阻力endfor i=1:length(ig)K=1; %开关for n=n_min:0.01:n_maxTtq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;%汽油发动机使用外特性的T_q-n曲线的拟合公式Ft=Ttq*ig(i)*i0*nt/r; %汽车驱动力u=0.377*n*r/ig(i)/i0; %发动机转速与汽车行驶速度之间的关系Ff=m*9.8*f+CDA*u^2/21.15; %汽车行驶阻力if Ft-Ff>0 %如果驱动力大于行驶阻力那么发动机最高转速对应的车速就是汽车的最高车速Umax(i)=0.377*n_max*r/ig(i)/i0;else %如果驱动力小于于行驶阻力那么计算的前一步就是对应的最高车速if K==1Umax(i)=0.377*n*r/ig(i)/i0;K=0;endendendenddisp '最高车速为:'%Umax=max(Umax(i-1),Umax(i))U_max=max(Umax)Ff=m*9.8*f+CDA*U_max^2/21.15;%%%%%%%%%%%根据运行结果标出最高车速%%%%%%%%%%text(U_max,Ff,'\leftarrow 最高车速','FontSize',12)stem(U_max,Ff)%%%%%%%%%%%%%%%%求最大爬坡度%%%%%%%%%%%%%%%%Ft1=Ttq*ig(1)*i0*nt/r;u1=0.377*n*r/ig(1)/i0 %一挡对应的驱动力Ff1=m*9.8*f+CDA*u1^2/21.15; %一挡对应的行驶阻力Ftt=Ft1-Ff1;%一挡对应的爬坡力imax=tan(asin(Ftt/9.8/3880)); %最大爬坡度disp '最大爬坡度为:'imax%%%%%%%%%%%%%%%前轮驱动对应的附着率%%%%%%%%%%%%b=L-a;q=imax;disp '前轮驱动对应的附着率为:'Cq=q/(b/L-hg*q/L) %前轮附着率方程disp '后轮驱动对应的附着率为:'Cq=q/(a/L+hg*q/L) %后轮附着率方程运行应用程序得1.3.2汽车行驶加速度倒数曲线M文件clear % 清除变量clc %清屏n_min=600; %发动机的最低转速n_max=4000; %发动机的最高转速m=3880; %总质量r=0.367; %车轮半径nt=0.85; %传动系机械效率f=0.013; %滚动阻力系数CDA=2.77; %空气阻力系数×迎风面积i0=5.83; %主减速器传动比If=0.218; %飞轮转动惯量Iw1=1.798; %二前轮转动惯量Iw2=3.598; %四后轮转动惯量L=3.2; %轴距a=1.947; %质心至前轴距离(满载)hg=0.9; %质心高(满载)%ig=[6.09 3.09 1.71 1]; %四档变速器传动比ig=[5.56 2.769 1.644 1 0.793];%五档变速器传动比%%%%%%%%绘制汽车行驶加速度倒数曲线%%%%%%%%%for i=1:length(ig)deta=1+(Iw1+Iw2)/(m*r^2)+If*ig(i)^2*i0^2*nt/(m*r^2);%汽车旋转质量换算系数u_min=0.377*n_min*r/ig(i)/i0; %最低车速u_max=0.377*n_max*r/ig(i)/i0; %最高车速for u=u_min:0.1:u_maxn=u*ig(i)*i0/r/0.377;Ttq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;%汽油发动机使用外特性的T_q-n曲线的拟合公式Ft=Ttq*ig(i)*i0*nt/r; %汽车驱动力Ff=m*9.8*f+CDA*u^2/21.15; %汽车行驶阻力;a_inv=deta*m/(Ft-Ff); %加速度倒数方程if a_inv<20 & a_inv>0title('汽车行驶加速度倒数曲线')xlabel('汽车行驶速度(km/h)')ylabel('加速度倒数')plot(u,a_inv) %绘制汽车行驶加速度倒数曲线hold onendendend运行应用程序得1.3.3加速时间M文件clear % 清除变量clc %清屏n_min=600; %发动机的最低转速n_max=4000; %发动机的最高转速m=3880; %总质量r=0.367; %车轮半径nt=0.85; %传动系机械效率f=0.013; %滚动阻力系数CDA=2.77; %空气阻力系数×迎风面积i0=5.83; %主减速器传动比If=0.218; %飞轮转动惯量Iw1=1.798; %二前轮转动惯量Iw2=3.598; %四后轮转动惯量L=3.2; %轴距a=1.947; %质心至前轴距离(满载)hg=0.9; %质心高(满载)%ig=[6.09 3.09 1.71 1]; %四档变速器传动比ig=[5.56 2.769 1.644 1 0.793];%五档变速器传动比g=9.8;G=m*g;u_min=0.377*r*n_min./ig/i0;u_max=0.377*r*n_max./ig/i0;for i=1:5deta(i)=1+(Iw1+Iw2)/(m*r^2)+(If*(ig(i))^2*i0^2*nt)/(m*r^2);end%for i=1:length(ig)% deta=1+(Iw1+Iw2)/(m*r^2)+If*ig(i)^2*i0^2*nt/(m*r^2);%汽车旋转质量换算系数% u_min=0.377*n_min*r/ig(i)/i0; %最低车速% u_max=0.377*n_max*r/ig(i)/i0; %最高车速%endua=[6:0.01:99];N=length(ua);n=0;Tq=0;Ft=0;inv_a=0*ua;delta=0*ua;Ff=G*f;Fw=CDA*ua.^2/21.15;for i=1:Nk=i;if ua(i)<=u_max(2)n=ua(i)*(ig(2)*i0/r)/0.377; %发动机转速与汽车行驶速度之间的关系Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;%汽油发动机使用外特性的T_q-n曲线的拟合公式Ft=Tq*ig(2)*i0*nt/r; %汽车驱动力inv_a(i)=(deta(2)*m)/(Ft-Ff-Fw(i)); %加速度倒数delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u_max(3)n=ua(i)*(ig(3)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;Ft=Tq*ig(3)*i0*nt/r;inv_a(i)=(deta(3)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u_max(4)n=ua(i)*(ig(4)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;Ft=Tq*ig(4)*i0*nt/r;inv_a(i)=(deta(4)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elsen=ua(i)*(ig(5)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;Ft=Tq*ig(5)*i0*nt/r;inv_a(i)=(deta(5)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;enda=delta(1:k);t(i)=sum(a);endplot(t,ua);axis([0 80 1 100]);title('汽车2档原地起步换挡加速时间曲线'); xlabel('时间t(s)');ylabel('速度ua(km/h)');[x,y]=ginput(2)运行应用程序得2.ABS仿真计算2.1一般定义滑移率为S=u a−rw ru w×100%式中,u w为车轮中心的速度;r为车轮滚动半径;w r为车轮旋转角速度。
制动系统动能转化建模与ABS自寻最优控制
车辆全液压制动系统执行机构建模及仿真
第18卷第3期 系 统 仿 真 学 报© V ol. 18 No. 3 2006年3月 Journal of System SimulationMar.田晋跃11.江苏大学汽车与交通工程学院2.同济大学机械工程学院摘要基于数学模型对执行机构的动态特性进行仿真证明全液压制动系统执行机构具有良好的制动性能关键词执行机构仿真中图分类号1004-731X (2006) 03-0778-03Modeling and Simulation of Actuator of Vehicle Hydraulic Brake SystemCHENG Zhen-dong1LIU Gang 2(1.School of Automobile and Traffic Engineering, Jiangsu University, Zhenjiang 212013, China良好的制动性能是汽车安全行驶的重要保障气顶液的结构形式其主要优点是系统的制动压力高且更便于实现电子控制传动装置充液阀向蓄能器供油传动装置将制动踏板控制的动力源传递给制动执行元件它将传动装置传来的动力变成摩擦力矩制动时进入制动油缸充液阀可以使蓄能器的内压保持在最低限度充液阀就会使泵向收稿日期2005-09-12作者简介1981-硕士生田晋跃男教授刘刚男博士生图1 车辆典型的全液压制动系统蓄能器充油我们对全液压制动系统的执行机构进行了简化可以将其分为两个阶段当踩下踏板阀推动活塞移动到制动衬块接触制动盘为止2006年3月 程振东, 等制动衬块碰到制动盘瞬间并引起瞬间的压力升高会迅速而平稳的增加液压泵通过充液阀给蓄能器的充液过程很短由蓄能器直接向制动油缸供油在对执行机构进行动态分析时(1)考虑到制动过程中制动液流量较小(2)忽略制动油管(3)不考虑外界对系统的影响踏板阀阀芯的位移输入看作是阶跃信号2.1 活塞运动阶段数学模型建立蓄能器的动态方程可以描述成蓄能器连接短管的液阻,5/ms N⋅L c v q L p k x k q −= (2)式中c k :流量-压力系数,sN m ⋅/5m2)(2AC q p p p d L L a ρ=−=∆ (3) 式中㎡x k dt dx B dtx d m p A p B p p pL p ⋅+⋅+⋅=⋅22(4) 式中包括活塞B k :活塞密封圈对活塞的阻力系数pBp x :活塞位移p A :活塞有效工作面积(2)2.2 油压建立阶段数学模型建立轮缸工作腔的流量连续方程l k : 轮缸工作腔泄漏系数K : 油液体积模量V : 液压缸工作腔及进油管内的油液体积(2)3 动态特性仿真在确定了全液压制动系统执行机构的数学模型后对某车辆的全液压制动系执行机构进行仿真求解表1 仿真参数s m k q /004.02= s N m k c ⋅×=−/103515 39/101m Pa k e ×=s rad a /40=ϖ 7.0=a ξPa K 8107×=331015.3m V −×=s Pa m k l /109311⋅×=−m x p 41067.8−×=231028.2m A p −×=m N k B /102.06×= 231025.6m A −×= kg m 5=7.0=dC3/900m kg =ρ由于制动器的间隙很小一般液压制动系统执行机构的反应时间为0.015为较清楚的反映活塞运动阶段活塞的速度和位移变化的趋势图4分别是不考虑间隙限制时图3该车的全液压制动系统在紧急制2006年3月 系 统 仿 真 学 报 Mar., 2006• 780 •动瞬间说明此车制动执行机构的设计满足要求图中可以清楚的看出即该车的制动系统反应时间为0.024s一般气压制动系统反应时间为0.05气顶液制动系统为0.03由此可见能够有效的减小制动距离制动管路长度和压力波传播速度等因素的影响从图5可以看出活塞才开始运动3.2 油压建立阶段动态特性仿真图6是油压建立阶段油缸压力变化曲线制动器作用时间约为0.22s根据资料[5][6]0.9s可见全液压制动系统制动器作用时间要远远小于气压及气顶液制动系因此在制动时可以提供足够的制动力虽然有油缸泄漏和油液压缩等因素的影响制动系统可以为车辆提供稳定持久的制动力为制动系统的设计提供依据由图中可以看出sPa m k l /102310⋅×=−当泄漏系数较小时压力建立的时间相对较长sm⋅×s m ⋅×图7 工作腔泄漏系数对油缸制动压力建立的响应特性图8所示是当油液的体积模量不变时油压的建立时间越短2006年3月邹龙方, 等激光, 2002, 13(12): 1211-1213.[9] 潘炜, 张晓霞, 罗斌, 等. 垂直腔半导体光放大器双稳及逻辑特性的理论研究[J]. 半导体学报, 2005, 26(2): 357-362.[10] Chaoyuan J, Yongzhen H, Lijuan Y, et al. Detailed model andinvestigation of gain saturation and carrier spatial hole burning for a semiconductor optical amplifier with gain clamping by a vertical laser field[J]. IEEE J. Quantum Electronics(S0018-9197), 2004, 40(5): 513-518.[11] Asghari M, White I H, Penty R V. Wavelength conversion usingsemiconductor optical amplifiers [J]. Journal of Lightwave Technology(S0733-8724), 1997, 15(7): 1181-1190.[12] Yabin Y, Xiaoping Z, Hanyi Z. Study on the dynamic range of inputpower for wavelength converter based on cross-phase modulation in SOA [J]. Optics Communications(S0030-4018), 2001, 200: 349-354.[13] Agrawal G P, Olsson N A. Self-phase modulation and spectralbroadening of optical pulses in semiconductor laser amplifiers [J]. IEEE J.Quantum Electronics(S0018-9197), 1989, 25(11): 2297-2306.[14] G P Agrawal. 非线性光纤光学原理及应用[M].贾东方, 余震虹,等译, 北京: 电子工业出版社, 2002.附录 A啁啾表达式为12ddtφυπ∆=− (A1) 相位表达式为12dgdzφα=−Γ (A2) 将(A2)代入(A1)得14L d dgg dzdt dtαυαπ∆=Γ+∫ (A3) 线宽增强因子α的表达式为4//dn dNdg dNπαλ=− (A4) α对t求导可得24(/)d dn dg d dg dNdt dN dN dtαπλ−=(A5) 增益表达式为230012(,)()()()N Ng N N Nλαγλλγλλ=−−−+− (A6) g对N求导得2001022()3()N Ndga k kdNγλλγλλ=−−+− (A7) (A7)对t求导得220102(/)26()Nd dg dN dN dNk kdt dt dtγγλλ=−+− (A8) 由等式dg dg dNdt dN dt= (A9) 可求出/dgdt求出/d dtα(A7)和(5)式代入(A9)后代入(A3)会影响制动的效能也会给设计制造带来困难对其执行机构动态特性进行了分析(2) 基于数学模型对某车辆的全液压制动系统执行机构进行了动态仿真并且验证了之前动态特性分析的正确性滞后时间短系统压力高(4) 运用仿真程序分析了影响制动性能的主要因素以及稳态压力的大小容积越小又会引起压力波动[1] 潘社卫柴森春2003,机械工业出版社, 1998.[3] 孟树兴. 汽车轴间制动力分配优化设计与制动性能计算机仿真研究[D].硕士学位论文2003.[4]卢长耿煤炭工业出版社, 1991.[5] 余志生.汽车理论机械工业出版社, 1999.[6] 王望予.汽车设计机械工业出版社, 2002.。
防抱死制动系统仿真
600
800
1000
1200
1400
1600
1800
制动时间(x10-2s)
重庆理工大学 系统建模与仿真 13
100 G(s) TB.s 1
重庆理工大学 系统建模与仿真 10
防抱死制动系统(ABS)
8.仿真曲线:
swich=1,ABS制动
速度曲线 紫色:车轮身速度 黄色:车轮速度
滑移率曲线 黄色:实际滑移率
重庆理工大学
系统建模与仿真
11
防抱死制动系统(ABS)
9.仿真曲线:
swich=0,非ABS制动
重庆理工大学 系统建模与仿真 6
防抱死制动系统(ABS)
4.单轮制动数学模型:
v v Rr
slip 1 w / v
v
Vv
Rr
f (slip)
Ff F
dVv m Ff dt dw I F f Rr Tb dt
重庆理工大学 系统建模与仿真
Tb
防止“除零”而采取的措施: 1.0 – u(1) / (u(2) + (u(2) == 0) * eps)
必定非零!
重庆理工大学 系统建模与仿真 9
防抱死制动系统(ABS)
7.Simulink模型精讲
bangbang 控制器原理:
1, Uk 1, En 0 En 0
制动系液压管路:一阶惯性环节
Ff
Fz
7
防抱死制动系统(ABS)
5.Simulink模型:
重庆理工大学
系统建模与仿真
8
防抱死制动系统(ABS)
6.基本模块介绍:
1. 2. 3. 4. 传递函数 Transfer Fcn Continuous 查找表 Lookup TableLoopup Tables 积分器(限幅)Integrator Continuous 终止仿真 Stop Sinks
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
制动系统建模、仿真及A B S控制器设计目录1. 动力学建模........................................................................................ - 0 -2. 分段线性的轮胎模型 ....................................................................... - 0 -3. 控制算法............................................................................................ - 1 -4. 仿真流程及参数输入 ....................................................................... - 1 -5. 实例分析............................................................................................ - 2 -6. MATLAB 仿真过程.......................................................................... - 3 -6.1.逻辑门限值控制器................................................................... - 3 -6.2.模糊控制器............................................................................... - 7 -6.2.1模糊控制器设计............................................................. - 7 -6.2.2模糊控制matlab仿真过程 ............................................ - 8 -6.3.PID控制器 ............................................................................. - 13 -通过两自由度单轮模型为例,介绍在MATLAB 环境下的控制系统力学建模、ABS 控制器设计及仿真分析过程。
1. 动力学建模某车辆简化后的制动力学模型如右图所示。
其中单轮模型质量m ,车轮滚动半径rd ,车轮转动惯量为Iw ,车辆旋转角速度为ω,车轮轮心前进速度为uw ,地面制动力为Fxb 。
作用于车轮的制动力矩为Tb 。
若忽略空气阻力与车轮滚动阻力,则系统的运动方程如下: wxb d b td I F r T d ω=- (1) xb tdu m F d ω= (2)式中,地面制动力Fxb 等于地面作用于车轮的法向反力Fx 与路面附着系数μ的乘积,其中μ为制动滑移率Sb 的函数。
2. 分段线性的轮胎模型根据第三章中介绍的有关轮胎纵向特性的内容,路面附着系数与车轮滑移率之间存在一定的非线性关系。
如果用两段直线近似表示路面附着-滑移曲线,可得到分段线性化的附着系数μ与车辆滑移率s b 的关系(即所谓的“Dugoff”模型),如下图所示。
其表达式如下:11h b b oo h g o h g bb oo o S S S S S SS S S S μμμμμμμ⎧=≤⎪⎪⎨--⎪=->⎪--⎩(3)式中,μb 为峰值附着系数;μg 为车轮完全抱死时(即Sb=1)时的路面附着系数;So 为峰值附着系数所对应的滑移率。
图1 单轮制动力模型图2 线性化的路面附着系数与车轮滑移率关系曲线3.控制算法这里以门限值控制算法为例,说明ABS控制器设计及制动系统力学的仿真过程。
采用门限制控制算法的基本思想是保证车轮滑移率在最理想的范围之内。
制动开始后,随着制动压力的升高车轮转速ω相应减小,车轮出现滑移;当车轮滑移率达到理想范围上限值Smax时,减小制动压力;随着制动压力的减小,直至减小到滑移率下限值Smin时再增大制动压力。
循环往复这一过程直至车辆停止。
因此,在ABS控制器起作用的过程中,滑移率总是保持在理想的范围内,从而保证车辆的最佳制动性能及行驶方向控制的稳定性。
4.仿真流程及参数输入由上可知,ABS控制器所用到的一些控制参数有:1)由路面附着系数μ与滑移率S b的关系曲线所表示的轮胎模型;2)滑移率控制上限S max、下限S min;3)车辆模型参数及初始车速μωo;4)制动器油压增长率k i和减小率k d等。
根据分析可知,控制逻辑实现的关键是计算当前车轮滑移率S b (t)并与预先确定的上限值(S max ,S min )进行比较,来判断对制动液压控制系统的增压或减压操作,控制流程如图3所示。
5. 实例分析单轮制动动力模型参数由表1给出。
设式图2定义的路面附着系数分别为μh =0.8,μg =0.6.以门限值控制算法设计ABS 控制器,使车轮滑移率S b 保持在最优值(S opt 附近),这里令S min =0.18,S max =0.22。
根据表1给出的模型参数及附着系数,按照图3所示的控制流程采用m 语言编制仿真程序。
需要指出的是,表1给出的制动系统控制参数仅作为参考,系统设计过程中可根据需要适当调整,已获得满意的结果。
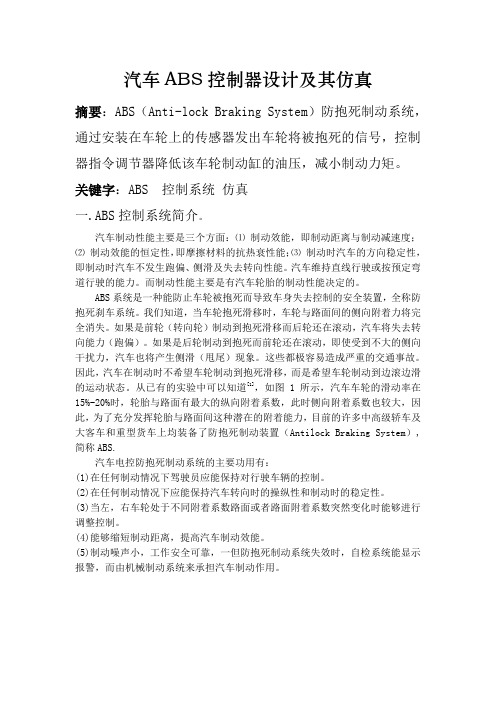
图3 仿真流程表1 单轮ABS制动力学模型参数6.MATLAB仿真过程6.1.逻辑门限值控制器Matlab代码如下:clearclc%% 输入初始参数m=300; %车轮质量rd=0.25; %车轮动力半径Iw=12; %车轮转动惯量u0=30; %初始车速w0=120; %初始角速度Tb0=600; %初始制动力矩ki=4500; %制动油压增长率kd=5000; %制动油压减少率dt=0.05; %采样时间u(1)=u0; %设置车速数组变量 w(1)=w0; %设置轮速数组变量 Tb(1)=Tb0; %设置制动压力数组变量 s(1)=0; %设置滑移率数组变量Fxb(1)=0; %设置地面制动力数组变量 %% 滑移率逻辑门控制 i=1;while (u(i)>0)s(i+1)=(u(i)-w(i)*rd)/u(i); %计算滑移率if s(i+1)<0.2 %计算纵向附着系数 mu=4*s(i+1); elsemu=0.85-0.25*s(i+1);endFxb(i+1)=m*9.8*mu; %计算地面制动力if s(i+1)<0.18 %与滑移率门限值比较,确定制动力矩Tb(i+1)=Tb(i)+ki*dt; elseif s(i+1)>0.22Tb(i+1)=Tb(i)-kd*dt;elseTb(i+1)=Tb(i); enddw=(Fxb(i+1)*rd-Tb(i+1))/Iw; %计算车轮角加速度 du=-Fxb(i+1)/m; %计算车身加速度 u(i+1)=u(i)+du*dt; %计算下一时刻车速 w(i+1)=w(i)+dw*dt; %计算下一时刻轮速 i=i+1; endt=0:dt:(i-1)*dt; plot(t,[u' w'*rd]) figure()plot(t,Fxb,t,Tb) figure() plot(t,s) 运行结果如下:逻辑门控制器1) 制动器制动力矩与地面制动力随时间变化曲线0.51 1.52 2.53 3.54 4.5时间t/s制动力制动力变化曲线2) 滑移率随时间变化曲线00.51 1.52 2.53 3.54时间t/s滑移率滑移率变化曲线3) 车速与轮速随时间变化曲线0.51 1.52 2.53 3.54 4.5时间t/s速度m /s车速与轮速变化曲线可以看出:● 基于滑移率的逻辑门限值控制器,可以限制滑移率在给定的最佳滑移率附近波动,汽车完全停止时,车速为零,滑移率趋于无穷大,所以在仿真时间最后一段,滑移率有较大波动。
● 制动器制动力矩在滑移率控制器的控制下,可以完成增压、保压、减压动作,防止车轮过早抱死,减小制动距离。
6.2.模糊控制器6.2.1模糊控制器设计1)输入量模糊化●为简化,仅选取滑移率偏差e作为输入量,当最佳滑移率选为0.2时,滑移率偏差范围为【-0.2,0.8】,经过适当变化,使e的变化范围为【-6,6】,以便于控制。
●为简化,仅选取三个语义词【N,Z,P】,即正、零、负。
分别定义各自的隶属度函数,进行模糊化,如下图:2)输出量反模糊化●选取制动器制动力矩改变量为输出量,取值范围设定为【-1,+1】。
同样,为简化,选取三个语义词【I,K,D】,即增压、保压、减压。
并定义相应隶属度函数,如下图:3)模糊规则●由于仅有一个输入量,且仅选取三个语义词,只需定义三条模糊规则,如下图:4)控制曲线●观察制动器制动力矩改变量与滑移率偏差的关系6.2.2模糊控制matlab仿真过程程序如下:clearclc%% 输入初始参数m=300; %车轮质量rd=0.25; %车轮动力半径Iw=12; %车轮转动惯量u0=30; %初始车速w0=120; %初始角速度 Tb0=600; %初始制动力矩 ki=4500; %制动油压增长率 kd=5000; %制动油压减少率 dt=0.05; %采样时间 u(1)=u0; %设置车速数组变量 w(1)=w0; %设置轮速数组变量 Tb(1)=Tb0; %设置制动压力数组变量 s(1)=0; %设置滑移率数组变量 Fxb(1)=0; %设置地面制动力数组变量 dtp(1)=0; %设置地面制动力变化量数组变量 %% 模糊控制 i=1;while (u(i)>0)s(i+1)=(u(i)-w(i)*rd)/u(i); %计算滑移率 if s(i+1)<0.2 %计算纵向附着系数 mu=4*s(i+1); elsemu=0.85-0.25*s(i+1); endFxb(i+1)=m*9.8*mu; %计算地面制动力e=12*(s(i+1)-0.5); %将滑移率偏差范围转化到【-6,6】 abs=readfis('abs_fzy2.fis'); %调用设计好的模糊控制器dtp(i+1)=evalfis(e,abs); %输出制动器制动力矩变化量Tb(i+1)=Tb(i)+2*5000*dtp(i+1)*dt; %计算制动器制动力矩 dw=(Fxb(i+1)*rd-Tb(i+1))/Iw; du=-Fxb(i+1)/m; u(i+1)=u(i)+du*dt; w(i+1)=w(i)+dw*dt; i=i+1; end模糊控制器%% 绘图t=0:dt:(i-1)*dt;plot(t,[u' w'*rd])figure()plot(t,Fxb,t,Tb)figure()plot(t,s)figure()plot(t,dtp)运行结果:1)模糊控制器输出,即Tb的变化量00.51 1.52 2.53 3.54 4.5-0.6-0.4-0.20.20.40.60.8时间t/s变化率模糊控制器输出(Tb 变化量)2) 地面制动力与制动器制动力矩-50005001000150020002500时间t/s制动力制动力变化曲线3) 滑移率00.51 1.52 2.53 3.54 4.50.050.10.150.20.250.30.350.4时间t/s滑移率滑移率变化曲线4) 车速与轮速0.51 1.52 2.53 3.54 4.5-5051015202530时间t/s速度m /s车速与轮速变化曲线6.3.PID 控制器 ● PID 控制器的设计选取滑移率s 的偏差e 作为输入,若选定最佳滑移率为0.2,则e=s-0.2;输出量为制动器制动力矩的变化量dtp 。