纯滞后环节高阶系统的内模控制及仿真
基于Taylor展开的纯滞后系统增益自适应内模PID控制

2 二 阶纯 滞 后 对 象 的 内模 PD控 制 I 设 被控 对 象 为
G (
囤 2 内模 控 制 系统 等垃 模 型
瓦 再 丽
~
(、 8
将 纯 滞 后 环 节 用 一 阶 y r 近后 被 控 对 象 的 内 部 b 逼
4 ・ 能控 制 技 术 一 智
《 气 自动 4 } 0 2年 第 l期 电 t 20
传 递 函数 为
C( 1 5 G ) ( 1一 G ) ) ( G(
=
图 1 内摸 控 制 原 理
( 1+
j
_ 1
一
() 7
从 式 ( ) 以 看 出 , G ) 用 二 阶 滤 波 器 时 , 位 7可 当 ( 采 单
反 馈控 制 器 可 以用 一个 带 滤 波 器 的 P 控 制 器 来 实 现 . I 实 际 的控 制 器 都 带 有 惯 性 环 节 , 而工 程 实 现 非 常 容 园
维普资讯
基 于 Ta lr 开 的 纯 滞 后 yo 展 系 统 增 益 自适 应 内模 P D 控 制 I
武 汉 大 学 (3 0 2 刘 开 培 40 7 ) 郑世 喜 陈 华
【 要 】 幸文 将 纯 滞后 环节 进行 一 阶 T y r 摘 a l 逼近 后 , 据 内模 控 制 原 理 . 到 了单 位 反馈 P D控 制器 的 参 数 整 o 根 得 I 定 值 , 后 运 用仿 ^智 能 的方 法 得到 被控 对象 的静 态增 益 , 然 由此 来 自动 调 整控 制 器 的 比例 系数 。仿 真 结 果 袁 明 , 盘 增 自适 应 内摸 pD 控 制 器能 克服 增 益 变化 对控 制性 能 的影 响 . 1 显著 改 善控 制 品质
根据内模基本知识的PID控制控制控制控制器参数整定仿真实验

基于内模原理的PID控制器参数整定仿真实验1.内模控制内模控制器(IMC)是内部模型控制器(Internal model controller)的简称,由控制器和滤波器两部分组成,两者对系统的作用相对独立,前者影响系统的响应性能,后者影响系统的鲁棒性。
它是一种实用性很强的控制方法,其主要特点是结构简单、设计直观简便,在线调节参数少,且调整方针明确,调整容易。
特别是对于鲁棒及抗扰性的改善和大时滞系统的控制,效果尤为显著。
因此自从其产生以来,不仅在慢响应的过程控制中获得了大量应用,在快响应的电机控制中也能取得了比PID更为优越的效果。
IMC设计简单、跟踪性能好、鲁棒性强,能消除不可测干扰的影响,一直为控制界所重视内模控制( Internal Model Control IMC ) 是一种基于过程数学模型进行控制器设计的新型控制策略。
其设计简单、控制性能良好,易于在线分析。
它不仅是一种实用的先进控制算法,而且是研究预测控制等基于模型的控制策略的重要理论基础,也是提高常规控制系统设计水平的有力工具。
值得注意的是,目前已经证明,已成功应用于大量工业过程的各类预测控制算法本质上都属于IMC类,在其等效的IMC结构中特殊之处只是其给定输入采用了未来的超前值(预检控制系统),这不仅可以从结构上说明预测控制为何具有良好的性能,而且为其进一步的深入分析和改进提供了有力的工具。
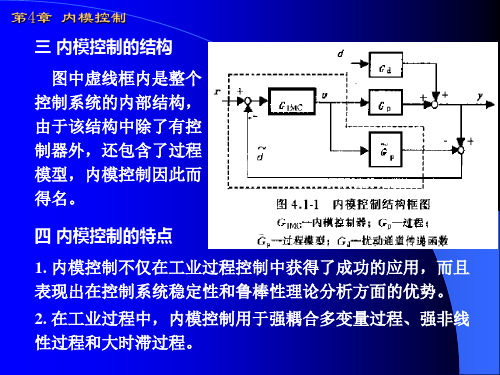
内模控制的结构框图如图1:图1-1 内模控制的结构图其中,IMC G —内模控制器;p G —实际被控过程对象;m G —被控过程的数学模型; d G —扰动通道传递函数。
(1)当0)(,0)(≠=s G s R d 时,假若模型准确,即)()(s G s G m p =,由图可知,)]()(1)[()]()(1)[()(IMC IMC s G s G s G s G s G s G s Y m d d -=-=p ,假若“模型可倒”,即)(1s G m 可以实现,则可令)(1)(IMC s G s G m =,可得0)(=s Y ,不管)(s G d 如何变化,对)(s Y 的影响为零。
采用状态反馈实现纯滞后系统的控制
工业生产过程 中, 滞后现象又是普遍存在的, 例如冶 金、 玻璃 、 造纸工业中板材厚度的控制 , 加热炉、 炉窑 的传热 , 化工、 炼油生产 中物料 的传 输, 反应器的化 学合成等系统都存在纯滞后环节 。目前工业控制 中 比较普遍采用 S i mt h预估控制 的方法, si 但 mt h预估 控制系统又存在( ) 1 随对 象特性变化 的鲁棒性差 ; () 2 当存在外扰动 时, 不能很好的克 服这两个主要 的缺点。虽然 目前对纯滞后对象的控制方法还有内 模控制、 灰度控制或是模糊控制等设计方法 , 但是都 存在着计算复杂或规则难以提取等困难。因此 , 本 文提出了一种采用状态反馈来控制纯滞后对象 的方 法, 其基本原理是由于实际对象带有纯滞后环节 , 其 状 态无法 直接 提取 , 因此加入 一个 状态观测 器 , 同时 将纯滞后环 节进行非对 称二 阶伯 德近 似, 再按 照 Btroh 波器原 理设 计 观 测器 和状 态 反馈 系数 ut wt 滤 e t
bc T i ak. hsme o rt e u e nay ' t Ⅵ t d 6 s vd d csa sn r 。一od ̄p d h I  ̄e yt re a emo e , e ein h tt d lt nd sgstes e—fe b c 丑 h a ed a k p .
本身具有低通滤波器 的特性( 抗高频干扰) 同时还 ,
具有状 态 反馈设 计 的最 优 特性 , 因此这 里 采 用非对
称的二 阶 Pd 近似是可行的。具体的近似式如式 a e
() 示 : 1所
e一 —
第十四节 纯滞后对象的控制
相应的闭环传函变为
D( z )G( z ) 0.2271 z 2 (1 0.733z 1 ) ( z ) 1 D( z )G( z ) 1 0.6065z 1 0.1664z 2 0.1664z 3
相应的控制量为
Φ( z ) 2.6356 (1 0.7413z 1 ) U (z) R( z ) G( z ) (1 0.6065z 1 )(1 z 1 )(1 0.733z 1 ) 2.6356 0.3484z 1 1.8096z 2 0.6078z 3 1.4093z 4 ...
可得补偿器的差分实现
p' (k ) p' (k 1) u (k 1) p ( k ) P' ( k ) p ' ( k l )
◆对带纯滞后的二阶惯性对象
Ke s G( s ) (T1 s 1)(T2 s 1)
纯滞后补偿器为
1 2 K (1 e Ts )(1 e s ) b z b z 1 1 2 D ( z ) Z ( 1 z ) 1 2 s ( T s 1 )( T s 1 ) 1 a z a z 1 2 1 2
◆振铃极点主要来源于G(z) 在负实轴或二、三象 限的零点;
◆对于一阶滞后对象,如果滞后时间为采样周期 的整数倍,离散化后不存在这样零点,故不会 产生振铃现象; ◆对二阶滞后对象和滞后时间不为采样周期整数 倍的一阶对象,离散化后则可能存在这样的零 点。
U ( z) R( z) Ku ( z)
通常用振铃幅度RA来衡量振铃强烈的程度。通常 用单位阶跃下数字控制器第0次输出量与第1次输 出量的差值来表示。 1 2
内模控制
然后在反馈和输人通道上增加反馈滤波器
和输人滤波器
,通过调整滤波器的结构和参数,使系统获得所期望的性能。 下面就对开环稳定过程进行离散内模控制器设计。
考虑一般情况,令被控对象为有纯滞后的非最小相位过程,则过
程模型可分解为两部分:
控制器取为: 设计时为保持闭环系统零稳态偏差特性,需满足:
可实现因子可取为:
经输人滤波器
后再送至控制器。
经柔化后的输人参考轨迹的一般形式为:
即
第4章 内模控制 4.6 简化模型预测控制(SMPC) 内模控制是一种极具理论价值的基于模型的控制策略,但其工程实
现因涉及模型求逆和滤波器合理设计等问题,设计过程较为复杂,尤
其是对于多输人多输出过程,实施难度更大。 1987年以后,Arulalan等人提出了一种简化模型预测控制(SMPC),其
对象输入为:
闭环系统输出为:
闭环系统误差为:
其中:
第4章 内模控制
对于模型无差,即 em (s) 的 0特殊情况,上式可简化为:
以上两式表明:对于无模型失配的情形,闭环传递函数
除了
中必须包含所有的滞后和右半
平面零点,且 必须有足够的阶次来避免物理上的不可实
现外,其他都是可以任意选择的。因此,闭环响应可以直接设
第4章 内模控制 4.3.3 设计示例
4.3.3.1 一阶加纯滞后过程
4.3.3.2 高阶过程
情形A.无右半平面(RHP)零点
情形B.具有右半平面(RHP)零点
第4章 内模控制
4.4 内模控制器设计——离散过程
当过程模型采用离散脉冲传递函数形式时,内模控制系统的性质仍
然成立。在离散时间条件下,设计内模控制器也仍然分为两步进行: 首先是设计一个稳定的理想控制器;
Simulink的时滞过程Smith预估控制与IMC研究方法研究 精品

基于Simulink的时滞过程Smith 预估控制与IMC控制方法研究Smith预估控制一、基本原理PID控制器因算法简单、鲁棒性好、可靠性高,一直是工业生产过程中应用最广的控制器。
然而实际生产过程往往具有非线性、时变不确定性,应用常规PID控制不能达到理想的控制效果。
这时往往不得不采用模型预测控制、自适应控制等先进控制策略来获得更好的控制性能。
近年来越来越多的研究人员就上层采用模型预测控制这类先进的控制算法,而底层保留传统的PID控制算法,即所谓的预测PID 控制算法,展开了一系列的研究。
1、纯滞后产生的主要原因:1)物料及能量在管道或者容器中传输及运送需要时间;2)物质反应、能量的释放及能量交换需要一定过程和时间;3)设备和设备之间的串联需要许多的中间环节;4)测量装置的响应时间;5)执行机构的动作时间;在控制对象调节通道、测量装置及执行机构等环节存在纯滞后时,控制系统闭环特征方程中就存在纯滞后因子,而且存在纯滞后的环节较多时,系统滞后时间也将随之增加。
因此明显降低了系统的稳定性,而且纯滞后时间越长,系统稳定性就越差。
由于纯滞后的存在,调节作用不及时,导致被调节系统的动态品质下降。
纯滞后越大,则系统的动态品质越差。
2、史密斯预估器原理在单回路控制系统中,控制器的传递函数为GC(s),被控对象传递函数为G O(s)e-ts,被控对象中不包含纯滞后部分的传递函数为G O(s),被控对象纯滞后部分的传递函数为e-ts。
则系统的闭环传递函数为Φ(S)=[GC(S)GO(S)e-τs]/[1+GC(S)GO(S)] (1)由式(1)可以看出,系统特征方程中含有纯滞后环节,它会降低系统的稳定性。
史密斯补偿的原理是:与控制器Gc(s)并接一个补偿环节,用来补偿被控对象中的纯滞后部分,这个补偿环节传递函数为Gm(s)=G o(s)(1-e-ts),t为纯滞后时间,补偿后的系统如图1所示。
图1 史密斯补偿后的控制系统从图中可以看出,若无系统延时时,系统等同于简单的预测PID 控制回路;而当系统有延时时,延时对系统的影响即可由Smith预估控制器消除,而预测PID参数则仅需根据无延时模型来整定,这样就可以避免延时带来的参数整定误差。
第4章 内模控制

控制器传递函数为:
模型匹配时
思考:SMPC的缺陷?
第4章 内模控制 4.7 内模控制的工业应用
4.7.2 热交换器温度控制
右图所示是一个蒸汽加热器实 验装置,加热介质为蒸汽,冷流 体为水。控制目标是通过调节加 热蒸汽流量来保证热交换器出口 热水温度平稳。 图中温度控制器采用微机实现。
(一) 对象建模
热交换器出口温度与蒸汽流量 的关系可由开环阶跃响应的实验获得:
第4章 内模控制 (二) 内模控制器设计
(i)对象模型分解: (ii)滤波器设计(即IMC控制器设计):
(三) 算法实现
第4章 内模控制
4.3.2 滤波器设计
f (s) p(s) q(s) 取如下形式:
满足上式的滤波器最简单形式为:
滤波器可以采取其他形式,甚至可获得更快的响应。 例如r=2,滤波器可取为:
第4章 内模控制
4.3.3 设计示例
4.3.3.1 一阶加纯滞后过程
4.3.3.2 高阶过程
情形A.无右半平面(RHP)零点
结构和参数,可以有效地抑制输出振荡,且可获得所期望的动态特性 和鲁棒性。
通常,反馈滤波器可选较为简单的一阶形式:
第4章 内模控制
在反馈通道中插人滤波器,可使原来不稳定的闭环系统镇定下来, 同时还有另外一个作用:就是可抑制干扰的作用。 模型匹配时,由于干扰引起的输出为: 举例:
若已知输出端的干扰为指数上升形式,即
2. 类型2系统 若闭环系统稳定,即使模型与过程失配,即 , 只要控制器满足 ,且 则此系统属于类型2。该系统对于所有斜坡输入和干扰均不存 在稳态误差。
第4章 内模控制 4.2.3 内模控制的实现问题 对于IMC系统,在模型准确情况下,只要令 即可获得理想的设定值跟踪和完全的干扰抑制效果。 然而,理想控制器性质常难以获得,其原因在于: 1. 若对象含有时滞特性; 2. 若对象模型含有右半平面(RHP)零点; 3. 若对象模型严格有理; 4. 采用理想控制器构成的系统,对于模型误差极为敏感,若 模型不准确,则无法确保闭环系统的鲁棒稳定性。 为了解决上述问题,在设计内模控制器时应分为两步进行: 1. 设计一个稳定的理想控制器,而不考虑系统的鲁棒性和约束; 2. 引人滤波器,通过调整滤波器的结构和参数来获得期望的动 态品质和鲁棒性。
内模控制及其仿真应用

力工具 。因此 自从其产生 以来 ,内模控 制 基于 内模控制理论 , 对山西神 头电厂再 针
热 汽 温 被 控 对 象 的 大 惯 性 、 大滞 后 特 点 ,
关 系 :
不 仅在 工业 过程 控制 中获得 了成功 的应 用 , 且 表 现 出在 控 制 系 统 稳 定 性 和 鲁 棒 而 性理 论分析方面 的优 势。 在 工业过程 中 , 用内模控制原理可 采 以提高P D 制器的设计水平 , I控 与经典P D I
De . 01 c2 0
F = (
( 4 )
G = 1 ’ c (去 荔 (
(0 1)
温 度 变 化 的 中 间 变 量 ( 合 蒸 汽 温 度 和 混 低 温 再 热 出 口 蒸 汽 温 度 ) 所 以 在 此 设 , 计 了 包 含 三 个 回 路 的 串 级 系 统 , 最 内 回
式 中,
( 包含所有的时滞和 右半 ) 。 ” … r 一
引 言
内模 控 制 ( nt nal M I r e Odel
是 C等结 雪M的价构其 中; 这 平… 点 … …具最、 特的 兰 I 就 …面 … 是有一J f传 ’ 一 零A … ,位… … ’ 相 正 一…
。
反馈控制瓢
一
递函 c控 制 器 设 计
C nrl o to ,简称 I c)是一种基于 过程数 M 学模型进行 控制 器设 计的新 型控制策 略。
其设计简单 、 制性能好和在 系统分析方 控 面具有优越性 ,因而内模控制 不仅是 一种 实用的先进控制算法 , 且是研究预测控 而 制 等基 于模 型的 控制 策 略的 重要 理 论基 础 ,以及提高常规控 制系统设计水平的有
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
纯滞后环节高阶系统的内模控制及仿真
发表时间:2018-10-18T13:52:34.917Z 来源:《河南电力》2018年8期作者:尚玉廷[导读] 在快响应的电机控制中也能取得了比PID更为优越的效果。
IMC设计简单、跟踪性能好、鲁棒性强,能消除不可测干扰的影响,一直为控制界所重视。
37142819790721xxxx 摘要:内模控制(IMC)是80年代初提出的,由Garcia和Morari引进,其产生的背景主要有两个方面,一是为了对当时提出的两种预测控制算法MAC和DMC进行系统分析;其次是作为Smith预估器的一种扩展,使设计更为简便,鲁棒及抗扰性大为改善。
内模控制器
(IMC)是内部模型控制器(Internal model controller)的简称,由控制器和滤波器两部分组成,两者对系统的作用相对独立,前者影响系统的响应性能,后者影响系统的鲁棒性。
它是一种实用性很强的控制方法,其主要特点是结构简单、设计直观简便,在线调节参数少,且调整方针明确,调整容易。
特别是对于鲁棒及抗扰性的改善和大时滞系统的控制,效果尤为显著。
因此自从其产生以来,不仅在慢响应的过程控制中获得了大量应用,在快响应的电机控制中也能取得了比PID更为优越的效果。
IMC设计简单、跟踪性能好、鲁棒性强,能消除不可测干扰的影响,一直为控制界所重视。
关键词:内模控制;IMC;鲁棒
经过十多年的发展,IMC方法不仅已扩展到了多变量和非线性系统,还产生了多种设计方法,较典型的有零极点对消法、预测控制法、针对PID控制器设计的IMC法、有限拍法等。
IMC与其他控制方法的结合也是很容易的,如自适应IMC,采用模糊决策、仿人控制、神经网络的智能型IMC等.值得注意的是,目前已经证明,已成功应用于大量工业过程的各类预测控制算法本质上都属于IMC类,在其等效的IMC结构中特殊之处只是其给定输入采用了未来的超前值(预检控制系统),这不仅可以从结构上说明预测控制为何具有良好的性能,而且为其进一步的深入分析和改进提供了有力的工具。
1.内模控制基本结构及其性质
内模控制不仅在工业过程控制中获得了成功的应用,而且表现出在控制系统稳定性和鲁棒性理论分析方面的优势。
在工业过程中,内模控制用于强耦合多变量过程、强非线性过程和大时滞过程。
内模控制基本结构如图1.1所示。
内模控制方法的关键是获取对象的模型逆,而相当一部分非线性系统的求逆问题可以通过微分几何方法中的动态逆的理论来解决,从而将内模控制与输入输出反馈线性化方法联系起来,而内模控制所具有的鲁棒性正好能够弥补微分几何方法的不足。
2.1 内模控制结构
图2.3 内模控制系统仿真结构图
2.4 仿真波形及结果分析
设置系统在阶跃信号,取一滤波器。
当取值0.1,0.2,0.3时系统输出波形分别如下图的三个波形所示:
图2.4 分别取值0.1,0.3,0.5时单变量内模控制系统仿真结果图
结论
由图2.4的仿真曲线可得出结论,改变内模控制器中滤波器的时间常数,对系统的响应速度有较大的影响。
对系统稳定性不产生影响,而且系统没有超调,估该内模控制系统可确保系统的稳定性。