机械原理课件英文版 叶仲和 蓝兆辉 Lecture4-3(平面连杆机构).
合集下载
《机械原理平面机构运动简图》PPT课件讲义
机构具有确定运动的条件: F>0且当F=主动件数目。
三、计算自由度时应注意的问题
1.复合铰链——两个以上的构件在同一处用转动副连接。
2 1
k个构件用复合铰链连接, 则转动副数目为:(k-1)
3
1
2
3
例:计算n圆=7盘, 锯主体机构的自由度。 解: A、B、C、D处有复合铰链,
PL=10 F=3n-2 PL-PH =3×7-2×10-0
例:绘制冲床机构的运动简图。
§2-3 平面机构的自由度
一、机构的自由度 1.自由度及约束
自由度——机构或构 件所具有的独立运动参数的 数目。
约束——对独立运动的 限制。 一个作平面运动的 自由构件具有三个 自由度。
2.平面机构自由度计算
构件组成运动副后,其 独立运动受到约束,自由度 将减少。
移动副:引入两个约束 (一个移动、一个转动)
以图2.10 所示,一偏心轮曲柄滑块机构为例,说明机 构运动简图的绘制方法。
图2.10 偏心轮曲柄滑块机构 图2.11 对应的机构运动简图
例题2.12:绘制图示颚式破碎机的运动简图 分析:该机构有6个构件和7个转动副。
图2.12 颚式破碎机构
图2.13 对应的机构运动简图
例:绘制机构运动简图。
=1
2.局部自由度——与整 个机构运动无关的自由度( 即多余的)。
计算时,应排 除局部自由度。
常见于凸轮机构滚子从动件以及类似将滑动摩擦变为滚 动摩擦的情况中。
3.虚约束——对机构的运动不产生实际约束效果的重复约 束。
计算时,应除取虚约束(包括有关的构件及运动副)
虚约束常见于以下情况(:虚约束)1'
1
(1)两构件之间形成多个导路平行的移动副。
三、计算自由度时应注意的问题
1.复合铰链——两个以上的构件在同一处用转动副连接。
2 1
k个构件用复合铰链连接, 则转动副数目为:(k-1)
3
1
2
3
例:计算n圆=7盘, 锯主体机构的自由度。 解: A、B、C、D处有复合铰链,
PL=10 F=3n-2 PL-PH =3×7-2×10-0
例:绘制冲床机构的运动简图。
§2-3 平面机构的自由度
一、机构的自由度 1.自由度及约束
自由度——机构或构 件所具有的独立运动参数的 数目。
约束——对独立运动的 限制。 一个作平面运动的 自由构件具有三个 自由度。
2.平面机构自由度计算
构件组成运动副后,其 独立运动受到约束,自由度 将减少。
移动副:引入两个约束 (一个移动、一个转动)
以图2.10 所示,一偏心轮曲柄滑块机构为例,说明机 构运动简图的绘制方法。
图2.10 偏心轮曲柄滑块机构 图2.11 对应的机构运动简图
例题2.12:绘制图示颚式破碎机的运动简图 分析:该机构有6个构件和7个转动副。
图2.12 颚式破碎机构
图2.13 对应的机构运动简图
例:绘制机构运动简图。
=1
2.局部自由度——与整 个机构运动无关的自由度( 即多余的)。
计算时,应排 除局部自由度。
常见于凸轮机构滚子从动件以及类似将滑动摩擦变为滚 动摩擦的情况中。
3.虚约束——对机构的运动不产生实际约束效果的重复约 束。
计算时,应除取虚约束(包括有关的构件及运动副)
虚约束常见于以下情况(:虚约束)1'
1
(1)两构件之间形成多个导路平行的移动副。
机械原理课件英文版 叶仲和 蓝兆辉 Lecture4-4(平面连杆机构)
4.4 Dimensional Synthesis of Four-bar Linkages
但是,设计的机构不能使连杆通过3个指定位置。
C 1(F1) B 1 E1) (
B 2(E 2)
A
D
C 2( F2 )
C 3( F3) B 3(E 3)
4.4 Dimensional Synthesis of Four-bar Linkages
②在所有位置,BCEF构成的 四边形的形状都应该完全相同
F2 F3
F1
构建四边形
B2C2F2E2 ≌B1C1F1E1, 得到点 B2,C2.
C1 C2
E2 B2 C3 E1 B1 E3 B3
构建四边形
B3C3F3E3 ≌B1C1F1E1,
得到点 B3,C3.
4.4 Dimensional Synthesis of Four-bar Linkages
F2 F3 E2 F1
分析:
A
E1
D
显然,B和C不能任取, 否则,B的三个位置 点的圆心不会刚好是 A; C的三个位置点 的圆心不会刚好是D。
E3
4.4 Dimensional Synthesis of Four-bar Linkages
证明: 若假设B1 、 C1任取。
F2 F3 E2 F1
C1
E1F1A代表圆周点 A相对于参考系EF 的第一个相对位置 (未画)
F1
E3F3A代表圆周点 A相对于参考系EF 的第三个相对位置。
A
E1
D
E3
4.4 Dimensional Synthesis of Four-bar Linkages
F2 F3 E2 A' 3 E1 F1
机械原理四连杆机构 ppt课件
ppt课件
12
1.急回运动
如图4-4所示为一曲柄摇杆机构, 其曲柄AB在转动一周的过程中,有两 次与连杆BC共线。在这两个位置,铰 链中心A与C之间的距离AC1和AC2分别 为最短和最长,因而摇杆CD的位置C1D 和C2D分别为其两个极限位置。摇杆在
两极限位置间的夹角称为摇杆的摆角。
ppt课件
13
有时死点来实现工作,如图4-6所示
工件夹紧装置,就是利用连杆BC与摇杆
CD形成的死点,这时工件经杆1、杆2传
给杆3的力,通过杆3的传动中心D。此力
则这时连杆加给曲柄的力将通过铰链中
心A,即机构处于压力角=90(传力角 =0)的位置时,驱动力的有效力为0。
此力对A点不产生力矩,因此不能使曲柄 转动。机构的这种位置称为死点。
ppt课件
25
死点会使机构的从动件出现卡死或 运动不确定的现象。可以利用回转机构 的惯性或添加辅助机构来克服。如家用 缝纫机中的脚踏机构,图4-3a。
23
若BCD由锐角变钝角,机构运 动将在BCD(min)和BCD(max)位置两次 出现传动角的极小值。两者中较小的
一个即为该机构的最小传动角min。
ppt课件
24
3.死点
对于图4-4所示的曲柄摇杆机构,如 以摇杆3 为原动件,而曲柄1 为从动件, 则当摇杆摆到极限位置C1D和C2D时,连 杆2与曲柄1共线,若不计各杆的质量,
非传动机构,<40,但不能过小。
ppt课件
21
确 定 最 小 传 动 角 min 。 由 图 4-5 中
∆ABD和∆BCD可分别写出
BD2=l12+l42-2l1l4cos BD2=l22+l32-2l2l3cosBCD
机械原理作业答案 叶仲和 蓝兆辉版

Fig2-4(a)
I
Redundant
H
constraint
J
G
KF
D
3
2
C
4
E
56
B 1A
Fig2-4(b)
解: (1)红线内的构件为重复结构,构成虚约束。 (2)去掉以上构件后,C 仍为构件 2、3、4 的复合铰链。 (3)滑块 5 与机架 6 之间为移动副。 F= 3n-2PL-Ph =3×5–2×7=1
解:
C
43
2
B1
8
A
D
E6
(a) C 为构件 2、3、4 的复合铰链。 (b) C 处有两个转动副和两个移动
副。 E 处有一个转动副和两个移 动副。
F= 3n-2PL-Ph =3×7 –2×10=1 注意:E 不是复合铰链!
7
Fig2-6(a)
5 AB=CD BC=AD 4
C
B2
1
3
A
D
B2 1
A
5
(3)当 EFG 为原动件时,
B
D
2
A
1 E4
8
5 F
G6
C 3
7 H
类型
杆号 内副
外副
III级杆组 1,2,3,4 B,D,转C A,E,移C 3-8
RRP
6,7
转H
G,移H7-8
Name
Class Student No.
Date
2-8 Make the structural analysis for the mechanism shown in Fig2-8.
B 1
( P16 )
2
12 3
机械专业英语图解教程
diestock
differential gear
disc brake drilling machine expanded metal
dowel
drawing board
drift
drill
dog clutch plate clutch clutch
faceplate
feeler gauge
90 0 dial gauge
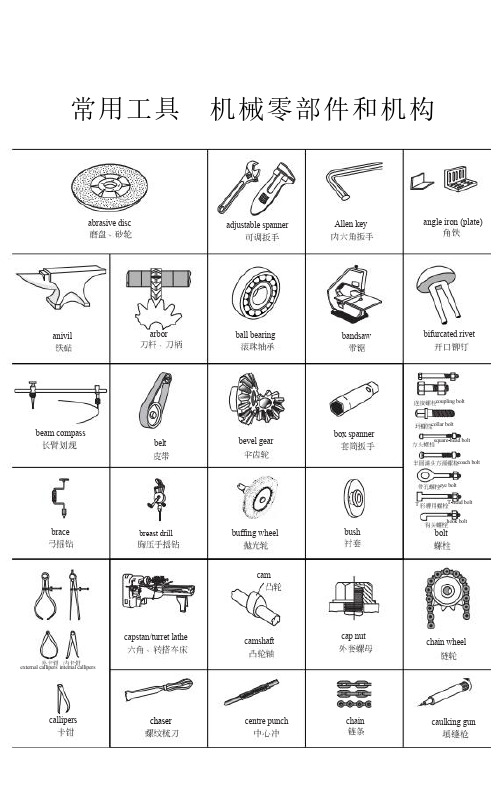
常用工具 机械零部件和机构
abrasive disc
adjustable spanner
Allen key
angle iron (plate)
anivil
arbor
ball bearing
bandsaw
bifurcated rivet
beam compass belt
brace
breast drill
washer
worm
worm wheel
worm gear
water-cooled engine
workbench
grinding machine
gear train
spur gear
spiral(helical) gear
gouge
gear cutter
grub screw
knob gudgeon pin shaft
piston ring 活塞环
poppet valve 气门 提升阀
power hammer 气锤
press 冲床 压力机
80 120
40
160
/m3 200
pressure gauge 压力表
propeller 螺旋桨
propeller shaft 传动轴
机械原理四连杆机构全解PPT课件
第37页/共87页
§4-2 铰链四杆机构的演化
一、铰链四杆机构的曲柄存在条件 铰链四杆机构中是否存在曲柄,取决于机构各杆的相对长度和机架的选
择。如图4-13所示的机构中,杆1为曲柄,杆2为连杆,杆3 为摇杆,杆4为机架, 各杆长度以l1、l2、l3、l4表示。为了保证曲柄1整周回转,曲柄1必须能顺利通过与 机架4共线的两个位置AB’和AB’’。
第51页/共87页
2.导杆机构 图4-16a)所示为曲柄滑块机构。
若取曲柄为机架,则为演变为导 杆机构,如图4-16b)所示。
若AB<BC,则杆2和杆4均可作整周回转,故称为转动导杆机构。若AB>BC,则杆4 均只能作往复摆动,故称为摆动导杆机构。
第52页/共87页
图4-17牛头刨床的摆动导杆机构
曲柄摇杆机构
双曲柄机构 双摇杆机构
第5页/共87页
一、 曲柄摇杆机构
在铰链四杆机构中,若两个连架杆,一个为曲柄,另一个为摇杆,则 此铰链四杆机构称为曲柄摇杆机构。
图4-2所示为调整雷达天线俯仰角的曲柄摇杆机构。曲柄1缓慢地匀速转 动,通过连杆2使摇杆3在一定的角度范围内摇动,从而调整天线俯仰角的大小。
第19页/共87页
在实际应用中,为度量方便起见,
常用压力角的余角来衡量机构传力性 能的好坏,称为传力角。显然值越大 越好,理想情况是=90。
一般机械中,=40~50。
大功率机构,min=50。
非传动机构,<40,但不能过小。
第20页/共87页
确 定 最 小 传 动 角 min 。 由 图 4-5 中
第25页/共87页
图4-6 利用死点夹紧工件的夹具
第26页/共87页
二、双曲柄机构 两连架杆均为曲柄的铰链四杆机构称为双曲柄机构。
§4-2 铰链四杆机构的演化
一、铰链四杆机构的曲柄存在条件 铰链四杆机构中是否存在曲柄,取决于机构各杆的相对长度和机架的选
择。如图4-13所示的机构中,杆1为曲柄,杆2为连杆,杆3 为摇杆,杆4为机架, 各杆长度以l1、l2、l3、l4表示。为了保证曲柄1整周回转,曲柄1必须能顺利通过与 机架4共线的两个位置AB’和AB’’。
第51页/共87页
2.导杆机构 图4-16a)所示为曲柄滑块机构。
若取曲柄为机架,则为演变为导 杆机构,如图4-16b)所示。
若AB<BC,则杆2和杆4均可作整周回转,故称为转动导杆机构。若AB>BC,则杆4 均只能作往复摆动,故称为摆动导杆机构。
第52页/共87页
图4-17牛头刨床的摆动导杆机构
曲柄摇杆机构
双曲柄机构 双摇杆机构
第5页/共87页
一、 曲柄摇杆机构
在铰链四杆机构中,若两个连架杆,一个为曲柄,另一个为摇杆,则 此铰链四杆机构称为曲柄摇杆机构。
图4-2所示为调整雷达天线俯仰角的曲柄摇杆机构。曲柄1缓慢地匀速转 动,通过连杆2使摇杆3在一定的角度范围内摇动,从而调整天线俯仰角的大小。
第19页/共87页
在实际应用中,为度量方便起见,
常用压力角的余角来衡量机构传力性 能的好坏,称为传力角。显然值越大 越好,理想情况是=90。
一般机械中,=40~50。
大功率机构,min=50。
非传动机构,<40,但不能过小。
第20页/共87页
确 定 最 小 传 动 角 min 。 由 图 4-5 中
第25页/共87页
图4-6 利用死点夹紧工件的夹具
第26页/共87页
二、双曲柄机构 两连架杆均为曲柄的铰链四杆机构称为双曲柄机构。
机械原理 平面连杆机构及设计PPT教学课件

3
16
曲柄滑块机构
1) 偏置曲柄滑块机构
B2 1 A
C3 e
2) 对心曲柄滑块机构
B
1
2
A
.
C3
17
曲柄移动导杆机构
2 B
1
A
C3
B2
1 3
A
正弦机构
s
s l.AB sin
18
2、取不同构件为机架(机构倒置)
1)铰链四杆机构的倒置
.
19
.
20
2)单滑块机构的倒置
曲柄滑块机构
曲柄转动导杆机构
在连架杆中,能绕其 轴线回转360°者称为曲 柄;仅能绕其轴线往复 摆动者称为摇杆。
1)曲柄摇杆机构:一个连架杆为曲柄,另一个为摇杆。 2)双曲柄机构:两连架杆均为曲柄。 3)双摇杆机构:两连架杆均为摇杆。
.
15
二、平面四杆机构的演变
1、转动副转化为移动副
2
1
3
4
铰链四杆机构
曲柄滑块机构
2
1 4
.
注意:铰链四杆机构必须满足四构件组成的封闭多边形条件:
最长杆的杆长 < 其余三杆长度之和。
.
33
曲柄滑块机构有曲柄的条件
B
a
b
C’
C
e
A
b a
B’
显然,需满足:
a+e ≤ b
.
34
B a
b C”
e
B’
B”
A
C C’
.
35
导杆机构有曲柄的条件
.
36
摆动导杆机构有曲柄的条件
d-a d
机械原理全套ppt课件
机械原理
沈阳航空工业学院
16
沈阳航空航天大学
机械原理
第8章 平面连杆机构及其设计
1.铰链四杆机构有曲柄的条件
(1)周转副的条件 (2)铰链四杆机构有曲柄的条件
① 各杆长度应满足杆长条件; ② 最短杆为连架杆或机架。
例:铰链四杆机构 1)各杆长度满足杆长条件
结论:
2)各杆长度不满足杆长条件
如果铰链四杆机构各杆长度满足杆长条件,当最短杆为连
(3)满足预定的轨迹要求
即要求在机构的运动过程中,连杆上某些点的轨迹能满足预 定的轨迹要求。
鹤式起重机 搅拌机构
连杆机构的设计方法有:图解法、解析法和实验法。
2. 用解析法设计四杆机构
(1)按预定的运动规律设计
1)按预定的两连架杆对应的位置设计 例1
2)按期望函数设计四杆机构
例2
(2)按预定的连杆位置设计
飞机起落架收放机构
折叠式桌的折叠机构
夹具
机械原理
沈阳航空工业学院
21
沈阳航空航天大学
机械原理
第8章 平面连杆机构及其设计
5.铰链四杆机构的连杆曲线
在四杆机构运动时,其连杆平面上的每一点均描绘出一条 曲线,称为连杆曲线(coupler curves)
B型
水滴型
面包型
瘦长型
机械原理
伪椭圆型
三角型
沈阳航空工业学院
a)已知连杆两个预定位置
b)已知连杆三个预定位置
c)已知连杆四个预定位置
机械原理
沈阳航空工业学院
26
沈阳航空航天大学
机械原理
第8章 平面连杆机构及其设计
(1)按连杆预定位置设计四杆机构
1 )假设活动铰链B、C已知,求固定铰链A、D
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4.3.2 压力角Pressure Angle () 和传动角 Transmission
Angle ()
1、压力角
B A
若不考虑各运动副中
C
的摩擦力及构件重力和惯
性力的影响,则由主动件
AB经连杆BC传递到输出
构件CD上C点的力F的方
向?
D
4.3 Characteristics Analysis of Four-bar Linkages
压力角 和传动角 必须画在从动件上; 对于同一运动链,选择不同的构件作机架,则压力角 和传动角 会发生改变。
Fr
F
C
Ft VC
C
VB
B
B
F
A
D
A
D
4.3 Characteristics Analysis of Four-bar Linkages
对于曲柄滑块机构,若曲柄是原动件,滑块是输出件, 则连杆BC与滑块的导路所成的锐角为压力角,其余角为传
4.3 Characteristics Analysis of Four-bar Linkages
在偏置曲柄滑块机构中,若要杆件AB能够相对机架作整周 回转,必须满足:
曲柄AB的长度 a + 偏距 e < 连杆BC的长度 b
B' B
a
e Ab
C
C'
4.3 Characteristics Analysis of Four-bar Linkages
在机构运动过程中, 压力角 和传动角 随着机构位置的
改变而变化.
为了保证机构具有良好的传力性能,需要限制:
压力角max≤ 40o,min≥50o . 所以需要找到 和 的极值.
Fr C
F Ft V C
B
A
D
4.3 Characteristics Analysis of Four-bar Linkages
e
A max
C'
4.3 Characteristics Analysis of Four-bar Linkages
3
1 11 1 4 44 4
1 11 1 4 44 4
111 1 444 4
111 1 444 4
A ACAraCnArkCa-nrrkaoCn-crkrkoa-ecnrrokkce-DkroecrDkeDrA DDAoADuobDulAeob-ulDcebr-olaceunr-backlnreak-nckDranDkDADAADoDuADobuolbeu-lDberlo-ercu-okrbcoelkcerek-DreorDcDkerADAACCraCrAnarkna-knrC-korr-coarkconekckrke-reorDcDkDer D
4.3.2 压力角Pressure Angle () 和传动角 Transmission
Angle ()
1、压力角
F
C
B
A
D
4.3 Characteristics Analysis of Four-bar Linkages
4.3.2 压力角Pressure Angle () 和传动角 Transmission
B
C2' C
A
B1 D
C1
B2
C2
4.3 Characteristics Analysis of Four-bar Linkages
机构 AB2C2D 称为平行曲柄机构 parallel-crank mechanism; 机构 AB2C2D 称为反平行曲柄机构 antiparallel-crank mechanism.
C C"
B" C'
A
D
4.3 Characteristics Analysis of Four-bar Linkages
非格拉晓夫连杆机构
4.3 Characteristics Analysis of Four-bar Linkages
但是,在某些双摇杆机构中,连杆可以相对其他构件作整 周运动,该机构称为格拉晓夫双摇杆机构。
4.3.3 Toggle(肘节) Positions and Dead-points
图示曲柄摇杆机构,当曲柄AB和连杆BC共线时,摇杆 DC 到达其运动极限位置DC1 和 DC2。
ω1 A
C2
C1
b
c
a B2
d
D
B1
4.3 Characteristics Analysis of Four-bar Linkages
Angle ()
1、压力角
Fr C
F Ft V C
B
A
D
4.3 Characteristics Analysis of Four-bar Linkages
力F与速度vC方向所成的锐角 acute angle称为机构在该点处
的压力角pressure angle 。用字母 表示。
Fr C
F Ft V C
ω 风
5
扇 摇
51
A2 B
ω21
头
机
3
构
1
D ω1 4
C
4.3 Characteristics Analysis of Four-bar Linkages
若 lmax + lmin = lb + lc, 则四个杆件的中心线可共线.
当四个杆件的中心线共线时,输出杆件的运动则不唯一。
该点称为转折点 change-points. 具有转折点的机构称为转折点 机构change-point mechanisms.
a d b c a b c d a c b d
最短杆长度+任一杆长度<其余两杆长度之和 铰链四杆机构具有曲柄的条件(格拉晓夫准则)
4.3 Characteristics Analysis of Four-bar Linkages
格拉晓夫准则也可表示成:最短杆长度+最长杆长度<其余两杆
a d b c a b c d a c b d
a c a b a d
C C2
b
B
C1
c
a
f
A B2
D
B1
d
fmin =d-a
fmax=d+a
4.3 Characteristics Analysis of Four-bar Linkages
a c
a
b
a d
曲柄必是曲柄滑块机构中的最短杆。
将力F分解为相互垂直的两个分力:
切向力F t ——推动从动件CD运动的有效力 径向力F r——铰链附加压力,加速铰链的摩擦磨损,有害力
Ft F cos F sin Fr F sin F cos
Fr C
F Ft V C
压力角 ↓, 传动角 ↑,有 B
效力↑
A
D
4.3 Characteristics Analysis of Four-bar Linkages
注意: 摇杆DC的运动极限位置不同于 min 出现的位置.
C
C
AB
γm'in
B
DA
γmin
D
4.3 Characteristics Analysis of Four-bar Linkages
偏置曲柄滑块机构中,滑块的运动极限位置也与其min 出现的位
置不同.
B1 a A
e
B2
b
C1
H
C2
B'
b
a
min
∵ 压力角 <90o,传动角 =90o- ∴ < 90o.
若 BCD < 90o, 则 =BCD.
若 BCD >90o, 则 = 180o- BCD.
Fr
F
γα
C
Ft
VC
γ
B
B
VC
αF
C
γ
A
D
A
D
4.3 Characteristics Analysis of Four-bar Linkages
B
C2' C
A
B1 D
C1
B2
C2
4.3 Characteristics Analysis of Four-bar Linkages
如何解决转折点的存在所引起的运动不确定性? 可在曲柄的轴上装飞轮,增加惯性
4.3 Characteristics Analysis of Four-bar Linkages
4.3 Characteristics Analysis of Four-bar Linkages
4.3.1 格拉晓夫准则Grashof Criterion (铰链四杆机构具有曲柄的条件)
假设:现需要设计一曲柄摇杆机构ABCD, 希望连架杆AB是曲柄,
而CD是摇杆。
C
要使此瞬时阿苏尔杆
b
B
f
组BC、CD能够组装在 其外副B、D上,必须
4.3 Characteristics Analysis of Four-bar Linkages
若 lmax + lmin > lb + lc, 则机构不满足格拉晓夫准则,该机构称为 非格拉晓夫连杆机构, 即该机构中没有连架杆能够作相对整周旋 转,而且该机构所有倒置的型式均为双摇杆机构。
B' B
表 4-1 铰链四杆机构的类型准则
长度 lmax + lmin < lb + lc lmax + lmin > lb + lc lmax + lmin = lb + lc 机架
Grashof
Non-Grashof Change-point