立式精锻机自动上料机械手设计
立式精锻机自动上料机械手和控制系统设计说明
是以压缩空气的压力来驱动执行机构运动的机械手。其主要特点是:介质李源极为方便,输出力小,气动动作迅速,结构简单,成本低。但是,由于空气具有可压缩的特性,工作速度的稳定性较差,冲击大,而且气源压力较低,抓重一般在30公斤以下,在同样抓重条件下它比液压机械手的结构大,所以适用于高速、轻载、高温和粉尘大的环境中进行工作。
工业机械手是近几十年发展起来的一种高科技自动化生产设备。工业机械手的是工业机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。机械手作业的准确性和各种环境中完成作业的能力,在国民经济领域有着广阔的发展前景。
机械手是在机械化,自动化生产过程中发展起来的一种新型装置。在现代生产过程中,机械手被广泛的运用于自动生产线中,机械人的研制和生产已成为高技术邻域内,迅速发展起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用。
立式精锻机自动上料机械手及其控制系统设计
第一章 绪论
机械工业是国民的装备部,是为国民经济提供装备和为人民生活提供耐用消费品的产业。不论是传统产业,还是新兴产业,都离不开各种各样的机械装备,机械工业所提供装备的性能、质量和成本,对国民经济各部门技术进步和经济效益有很大的和直接的影响。机械工业的规模和技术水平是衡量国家经济实力和科学技术水平的重要标志。因此,世界各国都把发展机械工业作为发展本国经济的战略重点之一。
2、通用机械手
它是一种具有独立控制系统的、程序可变的、动作灵活多样的机械手。格性能范围内,其动作程序是可变的,通过调整可在不同场合使用,驱动系统和控制系统是独立的。通用机械手的工作范围大、定位精度高、通用性强,适用于不断变换生产品种的中小批量自动化的生产。通用机械手按其控制定位的方式不同可分为简易型和伺服型两种:简易型以“开一关”式控制定位,只能是点位控制:可以是点位的,也可以实现连续轨迹控制,伺服型具有伺服系统定位控制系统,一般的伺服型通用机械手属于数控类型。
立式精锻机自动上料机械手的设计
摘要错误!未找到引用源。
本文介绍了立式精锻机自动上料机械手与其它设备的配置关系及工作过程,并对机械手的动作进行了分析,详细论述了机械手总体方案的设计,特别是对实现预期要求动作的各种方案进行了比较分析,进而得出最终方案。
根据手臂的动作要求,采用圆柱坐标型机械手;机械手的自由度数为四个,它们是大臂的升降和回转运动,小臂的伸缩运动,手腕的回转运动;机械手手部结构采用两支点回转型;机械手驱动方式采用液压驱动。
控制方式为点位程序控制。
本次设计主要进行大臂升降及回转机构设计、手臂及伸缩结构设计、手部结构设计,并且对液压系统进行理论分析和比较。
关键词:双作用式油缸;点位控制;液压系统;结构设计[单击此处键入中文关键词(自定义3-8个);用分号隔开]AbstractIndustrial manipulator is a kind of automatic devices, which substitutes people to carry out dangerous or duplicate work. It complies crawler tracks、handling work or manage or operate a tool according to set procedures and requirements. It is constituted with executive body、drive system and control system. In this paper, it has shortly introduced the position connection and work process between manipulator and other equipments. It has also given a relatively minute discussion of the manipulator overall plan, especially have compared the different projects to realize the require action and then given out the final scheme. According to the motion requirements of the manipulator’s arm, it has adopted cylindrical coordinate manipulator. The number of the manipulator’s freedom is four: up-down and rotating of the big arm, the straight reciprocating motion of the small arm, revolving movement of the wrist. The fingers of the manipulator have adopted the two-points sustain round structure. The power drive of manipulator is to be used is hydraulic system and control program for points for control type. This design is mainly consist of the design of large arm take-off and landing and rotating, the structural design of arm and telescopic arm, structural design of hand. What I mainly design is the structural design of large arm take-off and landing and rotation, and I carry out the theoretical analysis and comparison of hydraulic system.Key words:Double-acting oil cylinder;Point-to-point control;Hydraulic system ;Structural design错误!未找到引用源。
上下料机械手设计(结构设计)任务书 (22)
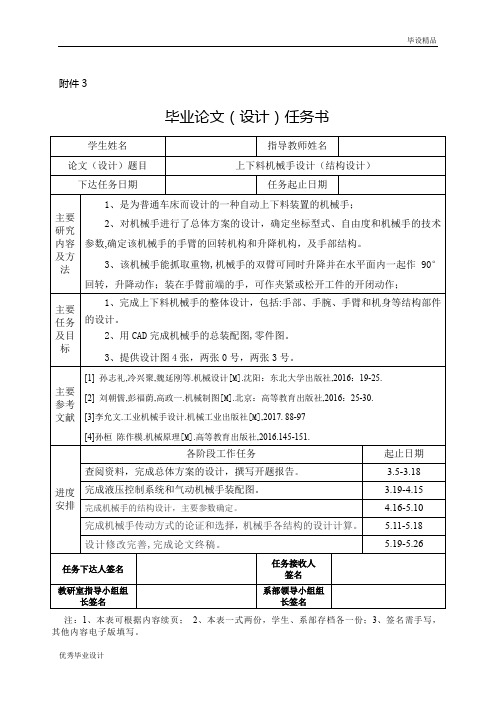
各阶段工作任务
起止日期
查阅资料,完成总体方案的设计,撰写开题报告。
3.5-3.18
完成液压控制系统和气动机械手装配图。
3.19-4.15
完成机械手的结构设计,主要参数确定。
4.16-5.10
完成机械手传动方式的论证和选择,机械手各结构的设计计算。
5.11-5.18
设计修改完善,完成论文终稿。
3、该机械手能抓取重物,机械手的双臂可同时升降并在水平面内一起作90°回转,升降动作;装在手臂前端的手,可作夹紧或松开工件的开闭动作;
主要任务及目标
1、完成上下料机械手的整体设计,包括:手部、手腕、手臂和机身等结构部件的设计。
2、用CAD完成机械手的总装配图,零件图。
[1]孙志礼,冷兴聚,魏延刚等.机械设计[M].沈阳:东北大学出版社,2016:19-25.
[2]刘朝儒,彭福荫,高政一.机械制图[M].北京:高等教育出版社,2016:25-30.
[3]李允文.工业机械手设计.机械工业出版社[M],2017. 88-97
[4]孙桓陈作模.机械原理[M].高等教育出版社,2016.145-151.
附件3
毕业论文(设计)任务书
学生姓名
指导教师姓名
论文(设计)题目
上下料机械手设计(结构设计)
下达任务日期
任务起止日期
主要研究内容及方法
1、是为普通车床而设计的一种自动上下料装置的机械手;
2、对机械手进行了总体方案的设计,确定坐标型式、自由度和机械手的技术参数,确定该机械手的手臂的回转机构和升降机构,及手部结构。
5.19-5.26
任务下达人签名
任务接收人
签名
教研室指导小组组长签名
立式精锻机自动上料机械手-手臂伸缩机构设计要点

立式精锻机自动上料机械手——手臂伸缩机构设计[摘要] 机械手的出现是随着工业技术的发展,人们发现人工的操作越来越不能满足工业生产的要求,因而设计出了机械手去替代人工做一些危险的工作。
这篇论文详细介绍了立式精锻机自动上料机械手的组成、结构特点和工作过程。
机械手主要是执行部份、驱动部分和控制部分组成。
执行部分包括机械手的手部、机械手的手臂、机械手的升降和回转结构。
本文对以上各机构的结构设计、计算以及校核方法作了具体的描述和分析,实现了机械手四个自由度、行程以及强度各方面的要求。
对于驱动部分,选择了液压驱动的驱动方式,对液压系统进行设计和对液压系统的传动方式进行设计,最后选择合适的液压元件并确定液压系统,通过上述部分设计,设计出了立式精锻机自动上料机械手,达到本次设计的要求。
[关键词] 立式精锻机;自动上料机械手;结构设计;液压驱动Vertical precision forging machine, automatic feeding manipulator arm telescopic mechanism design[Abstract] The appearance of manipulator is developed the industry technology. When people find that the manufacture by manual labor can not satisfy the demands of the industry produce, so the manipulator was designed to do something dangerous in stead of human. This paper introduces the main function, the structure feature and the composition of automatic feeding manipulator of vertical forging machine in detail. The composition of the mechanical industry machinery includes three parts: the mechanical part, the drive part and the the control part. The mechanical part mainly includes the hand of the manipulator, the arm of the manipulator and the fluctuation and rotation structure of the manipulator. The paper has made the concreted description and analysis on the general design process and the calculated method of the manipulator. Achieves the four-freedoms,route and some other aspects of the manipulator. Regarding the drive part, the author selects the hydraulic drive style,and then carries on the design calculation to the hydraulic system and carries on the design to the hydraulic transmission way, finally choose appropriate hydraulic pressure part, and then define hydraulic system. Through the above parts of designs, the author designs a hydraulic automatic feeding manipulator of vertical forging machine to achieve the design goal.[Keywords] Vertical forging machine; Automatic feeding manipulator;Structure design;Hydraulic drive.前言机械手是由执行机构、驱动装置、控制系统和智能系统组成。
数控机床上下料机械手的机械结构设计

机械结构设计原则
数控机床上下料机械手的机械结构设计需要遵循以下原则:
1、机械强度:机械手在搬运和装载工件时需要承受一定的重量和力矩,因 此其结构件应具有足够的强度和刚度,以避免产生形变和损坏。
2、耐久性:机械手需要长时间、高频率地工作,因此其结构件应具有较好 的耐久性,以延长机械手的使用寿命。
此外,还需考虑机械手的夹持机构和电气控制等因素,以确保机械手的安全 性和稳定性。
2、自动化生产线设计
自动化生产线设计是实现数控车床自动上下料的重要环节。通过将数控车床 与机械手连接起来,能够使整个生产过程更加协调和高效。在设计中,我们需要 根据生产节拍和生产工艺要求,合理规划机械手的运动路径和抓取速度,以确保 生产线的顺畅运行。此外,还需采用先进的数控技术,实现生产线的自动化和智 能化,提高生产效率和产品质量。
1、手臂:手臂是机械手的主要承载部件,通常采用轻质高强的材料制造, 以减小运动阻力。同时,手臂应具有足够的刚度和精度,以确保工件搬运和装载 的稳定性。
2、手腕:手腕是连接手臂和手部的关键部件,它不仅需要传递动力和运动 信息,还需确保手部姿态的精确控制。
3、手部:手部是机械手直接与工件接触的部分,它的结构设计需要根据所 搬运工件的形状和尺寸进行定制化设计。
4、驱动系统:驱动系统是机械手的动力来源,它可采用电动、气动或液压 等多种形式,根据实际需求进行选择。
5、控制系统:控制系统是机械手的“大脑”,它负责接收指令并控制机械 手的运动轨迹和姿态,以确保工件的精确搬运和装载。
机性能和降低成本,可采取以下优化 措施:
未来研究方向和意义:
1、进一步优化设计:通过对自动上下料机械手进一步研究和优化设计,提 高其性能表现、稳定性和使用寿命。
立式精锻机上料机械手手臂回转机构结构设计要点
建东职业技术学院(常州)指导教师:郭贯之专业负责人:发任务书日期: 2011 年 12月 20 日任务书填写要求1.毕业设计(论文)任务书由指导教师根据各课题的具体情况填写,经学生所在专业的负责人审查、学院(系)领导签字后生效。
此任务书应在毕业设计(论文)开始前一周内填好并发给学生;2.任务书内容必须用黑墨水笔工整书写或按教务处统一设计的电子文档标准格式(可从教务处网页上下载)打印,不得随便涂改或潦草书写,禁止打印在其它纸上后剪贴;3.任务书内填写的内容,必须和学生毕业设计(论文)完成的情况相一致,若有变更,应当经过所在专业及学院(系)主管领导审批后方可重新填写;4.任务书内有关“学院(系)”、“专业”等名称的填写,应写中文全称,不能写数字代码。
学生的“学号”要写全号;5.任务书内“主要参考文献”的填写,应按照国标GB 7714—2005《文后参考文献著录规则》的要求书写,不能有随意性;6.有关年月日等日期的填写,应当按照国标GB/T 7408—2005《数据元和交换格式、信息交换、日期和时间表示法》规定的要求,一律用阿拉伯数字书写。
如“2007年3月15日”或“2007-03-15”。
毕业设计(论文)任务书1.本毕业设计(论文)课题应达到的目的:工业机械手是一种模仿人手动作,能在几台机械设备间进行工件抓取、搬运、转移或操持工具进行操作的自动化机电装置。
本课题的上、下料机械手是轴类零件精锻自动生产线上的配套设备,上料机械手的任务是将加热后的坯料从运输车上取下,搬运到立式精锻机上精锻,下料机械手的任务是将精锻机上精锻工件取下,送到切割机上切齐。
本课题要求完成机械手主要设计图纸及有关资料,进入生产单位技术资料库,为生产单位提供储备。
2.本毕业设计(论文)课题任务的内容和要求(包括原始数据、技术要求、工作要求等):上、下料两只机械手固定于JD100立式精锻机前,与精锻机配套动作。
其中上料机械手动作过程如下:原始状态为,手臂缩回在精缎机前,精锻机精锻(延时2分钟)拔销→手臂逆转95°→插销→手臂下降200mm/手腕同时回转90°至水平,→手臂前伸500mm→水平抓取→手臂上抬300mm→手臂缩回500mm→拔销→手臂顺转95°/手腕同时回转90°至垂直→插销→手臂伸出500mm至精锻机→手臂下降100mm→手指放松→手臂缩回500mm→复位(精锻延时)。
自动上下料机械手毕业设计

自动上下料机械手毕业设计一、需求分析随着工业自动化水平的提高,自动上下料机械手在工业生产线上的作用越来越重要。
自动上下料机械手能够替代人工完成重复的上下料工作,提高生产效率和产品质量。
因此,设计一个具有自动上下料功能的机械手成为了当前毕业设计的热门课题之一二、系统结构设计在设计自动上下料机械手之前,需要先明确机械手的结构和工作原理。
1.结构设计2.工作原理机械手的工作原理主要分为三个步骤:识别物体位置、抓取物体、放置物体。
a.物体识别机械手需要通过视觉系统或传感器来识别需要上下料的物体位置。
视觉系统可以通过图像处理技术识别物体的形状、颜色和位置信息,传感器可以通过接触或非接触方式感知物体的位置。
b.抓取物体机械手通过夹爪对物体进行抓取。
夹爪可以采用机械夹持、气动夹持或电磁夹持等方式来完成抓取动作。
在抓取物体时需要注意夹爪的力度和抓取位置,以确保物体不会被损坏或滑落。
c.放置物体机械手将抓取的物体放置到目标位置。
在放置物体时同样需要注意放置位置和力度,以确保物体能够准确放置到目标位置。
三、技术选型在设计自动上下料机械手的过程中,需要选取合适的技术和材料。
1.机械结构机械结构可以采用金属、塑料或复合材料制作,具体选材要根据机械手的负荷和精度要求来决定。
2.夹爪夹爪可以根据具体应用选择合适的类型,例如并行夹爪、夹具夹爪或磁力夹爪等。
3.控制系统机械手的运动控制系统可以采用单片机、PLC或伺服电机控制等方式。
选择控制系统时需要考虑运动速度、精度和整体效率等因素。
四、系统实现在设计完机械手的结构和选型之后,需要进行系统的实现。
1.机械结构制作根据设计要求制作机械手的机械结构,包括机械臂、夹爪和固定装置等。
2.控制系统搭建根据选定的控制系统,搭建机械手的运动控制系统。
可以通过编程、电路连接和传感器安装等方式完成。
3.调试和测试完成机械手的组装后,进行调试和测试。
通过调试和测试可以发现和解决机械手运动、抓取和放置等环节出现的问题,并对系统进行优化和改进。
机械设计制造及其自动化毕业论文:自动上下料机械手直臂与夹持部件的三维设计及主要零部件设计

机械设计制造及其自动化毕业论文:自动上下料机械手直臂与夹持部件的三维设计及主要零部件设计中国计量学院现代科技学院毕业设计(论文)自动上下料机械手直臂与夹持部件的三维设计及主要零部件设计学生姓名XXX学号XXXXXX学生专业机械设计制造及其自动化班级机械XX 系机电指导教师XX 副教授自动上下料机械手直臂与夹持部件的三维设计及主要零部件设计摘要:机械手能代替人工操作,起到减轻工人的劳动强度,节约加工时间,提高生产效率,降低生产成本的特点。
在实用的基础上,对自动上下料机械手直臂与夹持部件进行三维设计,其中分为三个部分,手爪、手腕、直臂。
设计手爪为平移型夹持式手爪,传动结构为滑动丝杆。
手腕为回转型,转动角度为0-180°,传动结构为蜗轮蜗杆。
直臂传动结构为滚珠丝杆。
整体机械手为直角坐标型,驱动均为电机驱动,结构简单可靠,精度高。
关键词:机械手;直臂与夹持部件;Pro/e三维设计;CAD二维设计中图分类号:TH24目录摘要.................................................................................... (I)目次.................................................................................... (III)1绪论 (1)1.1前言和意义 (1)1.2 工业机械手的简史 (1)1.3 国内外研究现状和趋势 (3)1.4 本章小结 (3)2机械手直臂部分的总体设计 (4)2.1 执行机构的选择 (4)2.2 驱动机构的选择 (4)2.3传动结构的选择 (5)2.4 机械手的基本形式选择 (7)2.5 机械手直臂部分的主要部件及运动 (7)2.6 机械手的技术参数 (9)2.8 本章小结 (9)3机械手手爪的三维设计 (10)3.1 手部设计基本要求 (10)3.2 典型的手部结构 (10)3.3 机械手手爪的设计计算 (10)3.3.1选择手爪的类型及夹紧装置 (10)3.3.2 手爪夹持范围计算 (11)3.3.3 滑动丝杠设计 (12)3.3.4 直齿轮设计 (15)3.3.5电机选型 (16)3.4 机械手手爪的三维出图及其主要零部件出图 (17)3.5 本章小结 (20)4机械手手腕部分的三维设计 (20)4.1腕部设计的基本要求 (20)4.2 腕部的结构以及选择 (21)4.2.1 典型的腕部结构 (21)4.2.2 腕部结构和驱动机构的选择 (21)4.3 腕部的设计计算 (22)4.3.1 蜗轮轴的设计计算 (22)4.3.2 蜗轮齿轮设计 (24)4.3.3 步进电机选型 (26)4.4 手腕部分出图及主要零部件出图 (27)4.5本章小结 (32)5 直臂部分的三维设计 (34)5.1 手臂的结构的选择及其驱动机构 (34)5.2 滚珠丝杠设计 (34)5.3 锥齿轮设计 (37)5.4 电机选型 (41)5.5 机械手直臂部分三维出图及主要零部件出图 (41)5.6 本章小结 (45)6.总结 (45)学位论文数据集.................................................................................... . (43)1绪论1.1前言和意义机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要随着科学技术的发展,人类社会进入了一个以自动化和电子技术为标志的新时代。
自动化机械大量应用于工业工程中,其中工业机械手的应用最为广泛。
工业机械手是一种模仿人手动作的机器,可以取代很多的人工操作,并可以取得更高的效率。
本论文介绍了用于夹持外圆件的上下料机械手的设计。
它采用液压驱动,点位程序控制,动作平稳,控制方便。
本论文主要阐述该机械手的升降和回转的设计和计算。
首先从机械手的基础知识介绍有关机械手的组成、分类、腕部及臂部设计、液压控制的多种方案,再从本次设计所要求的功能原理设计开始,对于不同的方案加以比较和论证,从中可确定出最优方案,并采用其方案,在对其的结构设计的基础上,对其驱动力和驱动力力矩进行计算。
着重阐述了机身的设计,具体阐述了机械手的设计原则和步骤,分析了设计时应注意的问题,并对机械手的平稳性及定位精度给予详细的论述。
设计并分析了该机械手所用的液压控制的方法和过程。
由于经验不足,知识有限,难免有误,有待改进。
关键词机械手;液压;驱动力;定位精度ABSTRACTWith the development of technology, the human society entered a modern ear for with automation with electronics technique for marking. Automation machine large quantity is applied in industry engineering inside, among them the application of the industry machine hand is the most extensive. The industry machine of a kind of mimicry hand action, can replace a lot of artificials operate, combining can obtain the higher efficiency.This thesis introduces to used for clipping to hold the outside circle a design for and down anticipating machine hand. It adopts the liquid presses to drive, ordering a procedure control, acting steady, control convenience.This thesis expatiates the rise and fall of the machine’s hand primarily with the design of the turn-over with compute. Constitute, divide into section form the relevant machine in introduction in knowledge in foundation of the machine hand first, wrist a various projects for and arm department designing, liquid pressing control, start from this design a function for requesting principle, take into the comparison to the different project with the argument, can make sure the superior project from the inside, combine to adopt its project, in as to it’s of the foundation of the construction design, as to it’s driver force and moment proceed the calculation. Emphasize the design that expatiated the fuselage, expatiated the design principle of the machine hand in a specific way with the step, analyzed the problem of design should notice, and give to the steady and fixed position accuracy of the machine hand detailed treatise. Because of experience shortage, the knowledge is limited, difficult do not need the mistake, treat to improve.Key phrase manipulator;liquid presses;driving force;fixed position accuracy目录摘要 (I)绪论 (1)1工业机械手的概述 (3)1.1 工业机械手的分类 (3)1.2 工业机械手的组成 (4)1.3 机械手的自由度和坐标形式 (5)2自动上下料机械手的总功能原理及各部分设计 (7)2.1 功能原理设计 (7)2.2 手部设计 (7)2.2.1手部设计要求 (8)2.2.2手部结构 (8)2.2.3 夹持式手爪的计算 (11)2.3、腕部设计 (13)2.3.1 腕部设计要求 (13)2.3.2 腕部结构 (14)2.4 臂部设计 (15)2.4.1臂部的设计要求 (15)2.4.2臂部的结构 (20)2.4.2.1 臂部的伸缩运动结构 (20)2.4.2.2 臂部的伸缩油缸的计算 (21)2.4.2.3 臂部的回转运动 (23)2.4.2.4 臂部的升降运动 (24)2.4.2.5 臂部升降油缸的计算 (25)3机械手的其它部分装置 (28)3.1 行程限位装置 (28)3.2 缓冲定位装置 (28)4 机械手的总体方案总结 (30)4.1 传动方案的确定 (30)4.2 规格参数 (30)4.3 结构特点 (30)4.4 机械手的液压传动系统 (32)4.5 机械手的缓冲与定位 (34)参考文献 (35)致谢 (36)附录绪论在现代工业自动化生产领域里,材料的搬运、机床的上下料、整机的装配等是十分重要的工作环节,而实现这些环节的自动化将大大提高生产效率,减少成本。
用自动化机械代替人的工作可以减少事故的发生。
工业机械手就是为了实现这些环节的自动化而设计的。
自动化上下料装置是散乱的中小型工件毛坯经过定向机构实现定向排列,然后顺次地由上、下料机构把它送到机床或工作位置去,并把工件取走。
如工件教大,形状复杂,很难实现自动定向,则往往通过人工定位后,再有上下料机构送到工作地点去。
在成批大量生产中,尤其要求在生产率很高,机动工时很短的情况下,单纯的上下料装置很难满足要求,机械手就是在上下料机构的基础上发展起来的一种机械装置。
开始主要用来实现自动上下料和搬运工件,完成单机自动化和生产线自动化。
随着应用范围不断扩大,现已用来操作工具和完成一定工作,减轻工人的劳动强度,改善劳动条件,提高生产效率。
目前我国研制使用的工业机械手大多数是属于专用机械手,仅有少量的通用机械手。
由于通用机械手改变工作程序比较方便,特别适用于多品种、小批量的生产。
通用机械手在工业生产中的应用只有二十来年的历史。
这些装置在国外得到相当重视,到七十年代,其品种和数量都有很大的发展,并且研制出了各种具有感觉器官的工业机器人。
我所设计的是生产线用上料机械手。
是为精锻机设计的配套自动送取锻料设备。
属于圆柱坐标式,全液压驱动机械手,具有手臂升降,收缩,回转和手腕回转4个自由度,执行机构由手部,手腕,手臂伸缩机构,手臂升降机构,手臂回转机构组成。
它开始工作是被加热的坯料由运输车送2到上料位置后,自动上料机械手3将热坯料搬运到立式精锻机1上锻打,其成品锻件由下料机械手4从立式精锻机上取下并送到转换机械手5上,90成水平位置,由炳烷切割装置6将两端切齐,切割完毕,转换机械手先把锻件翻转87,将锻件水平放置到下料运输装置7上,运送到车间转换机械手的手臂再水平回转外面的料仓库进行冷却。
自动上料机械手3在此精锻生产线上可以完成取料、喂料和变换工位等动作。
其配置如图。
自动上料机械手配置示意图1 工业机械手的概述1.1、工业机械手的分类工业机械手目前在国内是专用机械手和通用机械手的统称。
专用机械手是指附属于主机、动作程序固定,一般没有独立控制系统,只做专门用途的自动抓取或操作装置。
通用机械手(国外泛称工业机器人)是指程序可变的、独立的、自动化的抓取或操作装置。
目前多机械手尚无明确的分类标准,全国各地区尚未统一,我们按目前应用比较多的两方面进行分类:(一)按搬运的工件重量(或称臂力)分类1.小型的——臂力在1公斤以下;2.中型的——臂力在1~30公斤以内:3.大型的——臂力在30公斤以上。
目前大多数的工业机械手其搬运重量为中型的。
(二)按机能分类1.简易型通用机械手有固定程序和可变程序两种。
固定程序由挡块或凸轮转鼓控制;可变程序用插销板来给定程序。
这种机械手多为气动或液压驱动,结构简单,成本较低,改变程序较容易。
只适用于程序较简单的点位控制,实现重复性操作作为一般单机服务的搬运工作也完全够。
目前这种机械手的数量最多。
2.示教再现型通用机械手这种机械手由人工通过示教装置领动一遍,或者预先操作给定一遍,称为示教。
它由磁鼓(或磁带、磁芯)把程序记录下来,以后机械手就自动按记忆的程序,重复地进行循环动作。
这种机械手多为电液伺服控制。
与前者比较,这种机械手可有较多的自由度,有可能实现连续轨迹控制,能进行程序较复杂的作业,通用性较大。
3.具有视觉、触觉的通用机械手这种机械手由电子计算机控制,装有电视摄像管和传感器等,因而具有视觉、热感、触觉等。
1.2、工业机械手的组成工业机械手的结构有简单的也有复杂的。
但从结构形式分析,主要有执行机构、驱动机构、位置检测装置和控制系统等组成。
(一)执行机构它包括手部、腕部、臂部、立柱和基体等构件组成:1.手部——是夹持工件的构件。
它由手爪和夹紧装置两部分组成。
手爪有夹紧和松开动作。
夹持式手爪的形式和人的手指相仿。