L3G4200D中文数据手册
陀螺仪芯片手册L3G4200D亲手译

L3G4200D MEMS 运动传感器: 超稳定的三轴数字输出陀螺仪
特点
■三种可选的全尺度(250/500/2000DPS) ■I2C/SPI 数字输出接口 ■16 比特率值的数据输出 ■8 位温度数据输出 ■两个数字输出线(中断和数据就绪) ■集成的低和高通滤波器与用户可选择带宽 ■超稳定的温度和时间 ■宽电源电压:2.4 V 至 3.6 V ■低电压兼容的 IOS(1.8 伏) ■嵌入省电和睡眠模式 ■嵌入式温度传感器 ■嵌入式 FIFO(先入现出堆栈) ■高冲击的生存能力 ■扩展的工作温度范围(-40℃至+85℃) ■ECOPACK® RoHS 和“绿色”兼容
5.2.2 SPI 写………………………………25 5.2.3 SPI 读三线模式…………………………26 6 输出寄存器映射…………………………27 7 寄存器的描述…………………………29 7.1 WHO_AM_I(0FH)……………………………… … 29 7.2 CTRL_REG1(20H)……………………………… 29 7.3 CTRL_REG2(21H)……………………………… 30 7.4 CTRL_REG3(22H)……………………………… 31 7.5 CTRL_REG4(23H)……………………………… 32 7.6 CTRL_REG5(24 小时)……………………………… 32 7.7 参考/ DATACAPTURE(25H)……………………34 7.8 OUT_TEMP(26H)……………………………… 34
应用
■游戏和虚拟现实输入设备 ■运动控制与人机界面(人机接口) ■全球定位导航系统 ■家电和机器人技术
说明
L3G4200D 是一种低功耗三轴角 速率传感器能够提供前所未有的 安然的零利率水平和灵敏度超过 温度和时间…它包括一个传感 元素,并能够提供一个 IC 接口 外部世界的测角速率 通过数字接口(I2C/SPI)…
L3G4200D 51单片机IIC 测试程序

//这是L3G4200D 51单片机IIC 测试程序//这是1602 头文件保存为1602.h#define DataPort P0 //LCD1602数据端口sbit LCD_RS=P2^4; //LCD1602命令端口sbit LCD_RW=P2^5; //LCD1602命令端口sbit LCD_EN=P2^6; //LCD1602命令端口#include <INTRINS.H>#define uchar unsigned charvoid WaitForEnable(void){DataPort=0xff;LCD_RS=0;LCD_RW=1;_nop_();LCD_EN=1;_nop_();_nop_();while(DataPort&0x80);LCD_EN=0;}void WriteCommandLCD(uchar CMD,uchar Attribc) {if(Attribc)WaitForEnable();LCD_RS=0;LCD_RW=0;_nop_();DataPort=CMD;_nop_();LCD_EN=1;_nop_();_nop_();LCD_EN=0;}void WriteDataLCD(uchar dataW){WaitForEnable();LCD_RS=1;LCD_RW=0;_nop_();DataPort=dataW;_nop_();LCD_EN=1;_nop_();_nop_();LCD_EN=0;}void InitLcd(){WriteCommandLCD(0x38,1);WriteCommandLCD(0x08,1);WriteCommandLCD(0x01,1);WriteCommandLCD(0x06,1);WriteCommandLCD(0x0c,1);}void DisplayOneChar(uchar X,uchar Y,uchar DData) {Y&=1;X&=15;if(Y)X|=0x40;X|=0x80;WriteCommandLCD(X,0);WriteDataLCD(DData);}//下面是主程序部分//*************************************** // L3G4200D三轴陀螺仪IIC测试程序// 使用单片机STC89C51// 晶振:11.0592M// 显示:LCD1602// 编译环境Keil uVision2// 参考宏晶网站24c04通信程序// 时间:2011年3月1日//**************************************** #include <reg52.h>#include "1602.h"#include <math.h>#include <stdio.h>#include <INTRINS.H>#define uchar unsigned char#define uint unsigned intsbit SCL=P1^0 ; //IIC时钟引脚定义sbit SDA=P1^1 ; //IIC数据引脚定义//********************#define WHO_AM_I 0x0F#define CTRL_REG1 0x20 // 0010 0000#define CTRL_REG2 0x21#define CTRL_REG3 0x22#define CTRL_REG4 0x23#define CTRL_REG5 0x24#define OUT_X_L 0x28#define OUT_X_H 0x29#define OUT_Y_L 0x2A#define OUT_Y_H 0x2B#define OUT_Z_L 0x2C#define OUT_Z_H 0x2D#define SlaveAddress 0xD2 //定义器件在IIC总线中的从地址,根据ALT ADDRESS地址引脚不同修改typedef unsigned char BYTE;typedef unsigned short WORD;BYTE BUF[8]; //接收数据缓存区long temp;uchar ge,shi,bai,qian,wan; //显示变量int dis_data;//变量//int temp;void delay(unsigned int k);void InitL3G4200D(uchar ); //初始化L3G4200Dvoid conversion(uint temp_data);void Single_WriteL3G4200D(uchar REG_Address,uchar REG_data); //单个写入数据uchar Single_ReadL3G4200D(uchar REG_Address); //单个读取内部寄存器数据void Delay5ms();//void Multiple_readL3G4200D(void);//------------------------------------void Delay5us();void L3G4200D_Start();void L3G4200D_Stop();void L3G4200D_SendACK(bit ack);void L3G4200D_RecvACK();void L3G4200D_SendByte(BYTE dat);BYTE L3G4200D_RecvByte();void display_x();void display_y();void display_z();//-----------------------------------//********************************************************* void conversion(uint temp_data){temp_data*=0.875;wan=temp_data/10000+0x30 ;temp_data=temp_data%10000; //取余运算qian=temp_data/1000+0x30 ;temp_data=temp_data%1000; //取余运算bai=temp_data/100+0x30 ;temp_data=temp_data%100; //取余运算shi=temp_data/10+0x30 ;temp_data=temp_data%10; //取余运算ge=temp_data+0x30;}/*******************************/void delay(unsigned int k){unsigned int i,j;for(i=0;i<k;i++){for(j=0;j<121;j++){;}}}/*****************************************************************延时5微秒(STC90C52RC@12M)不同的工作环境,需要调整此函数,注意时钟过快时需要修改当改用1T的MCU时,请调整此延时函数**************************************/void Delay5us(){_nop_();_nop_();_nop_();_nop_();}/**************************************延时5毫秒(STC90C52RC@12M)不同的工作环境,需要调整此函数当改用1T的MCU时,请调整此延时函数**************************************//*void Delay5ms(){WORD n = 560;while (n--);}*//**************************************起始信号**************************************/ void L3G4200D_Start(){SDA = 1; //拉高数据线SCL = 1; //拉高时钟线Delay5us(); //延时SDA = 0; //产生下降沿Delay5us(); //延时SCL = 0; //拉低时钟线}/**************************************停止信号**************************************/ void L3G4200D_Stop(){SDA = 0; //拉低数据线SCL = 1; //拉高时钟线Delay5us(); //延时SDA = 1; //产生上升沿Delay5us(); //延时}/**************************************发送应答信号入口参数:ack (0:ACK 1:NAK)**************************************/void L3G4200D_SendACK(bit ack){SDA = ack; //写应答信号SCL = 1; //拉高时钟线Delay5us(); //延时SCL = 0; //拉低时钟线Delay5us(); //延时}/**************************************接收应答信号**************************************/void L3G4200D_RecvACK(){SCL = 1; //拉高时钟线Delay5us(); //延时while(SDA==1);SCL = 0; //拉低时钟线Delay5us(); //延时}/**************************************向IIC总线发送一个字节数据**************************************/void L3G4200D_SendByte(BYTE dat){BYTE i;for (i=0; i<8; i++) //8位计数器{SDA = dat&0x80; //送数据口dat=dat<<1;SCL = 1; //拉高时钟线Delay5us(); //延时SCL = 0; //拉低时钟线Delay5us(); //延时}L3G4200D_RecvACK();}/**************************************从IIC总线接收一个字节数据**************************************/BYTE L3G4200D_RecvByte(){BYTE i;BYTE dat = 0;SDA = 1; //使能内部上拉,准备读取数据,for (i=0; i<8; i++) //8位计数器{dat <<= 1; //这里的1是00000001SCL = 1; //拉高时钟线Delay5us(); //延时dat |= SDA; //读数据SDA 00000000 or 00000001SCL = 0; //拉低时钟线Delay5us(); //延时}return dat;}//单字节写入*******************************************void Single_WriteL3G4200D(uchar REG_Address,uchar REG_data){L3G4200D_Start(); //起始信号L3G4200D_SendByte(SlaveAddress); //发送设备地址+写信号L3G4200D_SendByte(REG_Address); //内部寄存器地址,请参考中文pdf22页L3G4200D_SendByte(REG_data); //内部寄存器数据,请参考中文pdf22页L3G4200D_Stop(); //发送停止信号}//单字节读取*****************************************uchar Single_ReadL3G4200D(uchar REG_Address){ uchar REG_data;L3G4200D_Start(); //起始信号L3G4200D_SendByte(SlaveAddress); //发送设备地址+写信号L3G4200D_SendByte(REG_Address); //发送存储单元地址,从0开始L3G4200D_Start(); //起始信号L3G4200D_SendByte(SlaveAddress+1); //发送设备地址+读信号REG_data=L3G4200D_RecvByte(); //读出寄存器数据L3G4200D_SendACK(1);L3G4200D_Stop(); //停止信号return REG_data;}//*************************************************/*void Multiple_readL3G4200D(void){ uchar i;L3G4200D_Start(); //起始信号L3G4200D_SendByte(SlaveAddress); //发送设备地址+写信号L3G4200D_SendByte(0x28); //发送存储单元地址L3G4200D_Start(); //起始信号L3G4200D_SendByte(SlaveAddress+1); //发送设备地址+读信号for (i=0; i<6; i++) //连续读取6个地址数据,存储中BUF{BUF[i] = L3G4200D_RecvByte()&0xFF; //BUF存储数据if (i == 5){L3G4200D_SendACK(1); //最后一个数据需要回NOACK}else{L3G4200D_SendACK(0); //回应ACK}}L3G4200D_Stop(); //停止信号Delay5ms();}*///*****************************************************************//初始化L3G4200D,根据需要请参考pdf,第27页,进行修改************************void InitL3G4200D(){Single_WriteL3G4200D(CTRL_REG1, 0x4f); // 0x0f=00001111 200hz普通模式X Y Z 启用。
kobuki通信协议
附录:协议说明综述Kobuki驱动程序与机器人通过预先设定好的协议进行通信。
通常,驱动会发送指令给机器人,并且得到机器人的反馈数据或传感器消息。
这些命令和反馈数据被转换为bytestream 通过串口通信。
通信协议规定了bytestream的规则和形式。
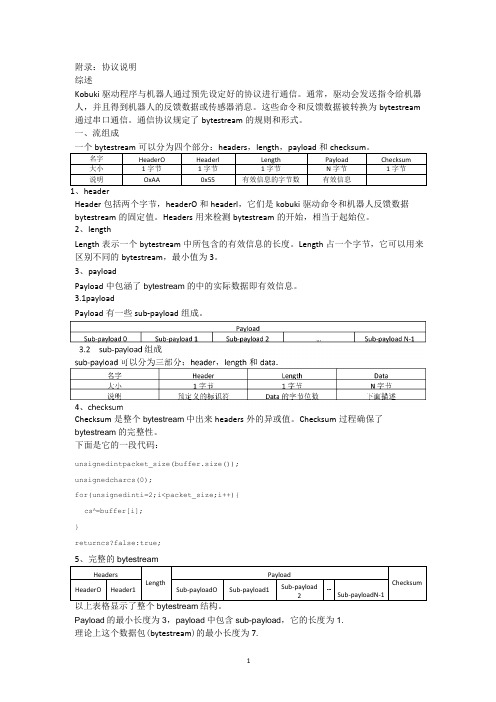
一、流组成一个bytestream可以分为四个部分:headers,length,payload和checksum。
Header包括两个字节,headerO和headerl,它们是kobuki驱动命令和机器人反馈数据bytestream的固定值。
Headers用来检测bytestream的开始,相当于起始位。
2、lengthLength表示一个bytestream中所包含的有效信息的长度。
Length占一个字节,它可以用来区别不同的bytestream,最小值为3。
3、payloadPayload中包涵了bytestream的中的实际数据即有效信息。
3.1payloadPayload有一些sub-payload组成。
Checksum是整个bytestream中出来headers外的异或值。
Checksum过程确保了bytestream的完整性。
下面是它的一段代码:unsignedintpacket_size(buffer.size());unsignedcharcs(0);for(unsignedinti=2;i<packet_size;i++){cs A=buffer[i];}returncs?false:true;5、完整的bytestreambytestreamPayload的最小长度为3,payload中包含sub-payload,它的长度为1.理论上这个数据包(bytestream)的最小长度为7.二、数据类型1、序列化—反序列化序列化是将数据结构转化为bytestream的过程,反序列化是一个逆转过程。
每个数据类型都通过LSB-Firstorder序列化和反序列化。
移动机器人视觉伺服系统上位机软件的设计与实现
移动机器人视觉伺服系统上位机软件的设计与实现仇翔;陈旭;刘安东;俞立【摘要】针对移动机器人视觉伺服系统,采用C++语言设计了一款基于Qt的跨平台实时数据可视化上位机软件;该软件执行图像处理算法和数据分析,实现绘制移动机器人实时轨迹和实时参数曲线等功能;首先介绍了移动机器人的硬件组成和功能;其次阐述了上位机软件的开发环境和设计步骤,并详细叙述图像算法的运行流程和实时在线绘制波形图等功能;最后通过视觉伺服跟踪控制实验采集数据,并实时显示来验证所设计上位机软件功能的有效性.【期刊名称】《计算机测量与控制》【年(卷),期】2019(027)004【总页数】5页(P106-110)【关键词】Qt;上位机;移动机器人;视觉伺服;数据可视化【作者】仇翔;陈旭;刘安东;俞立【作者单位】浙江工业大学信息工程学院,杭州 310023;浙江工业大学信息工程学院,杭州 310023;浙江工业大学信息工程学院,杭州 310023;浙江工业大学信息工程学院,杭州 310023【正文语种】中文【中图分类】TP2420 引言移动机器人是具有一定自主执行相关动作能力的机械设备,其移动方式有两轮差分、四轮全向、履带或者腿式机械足等,具有一定范围内的自由移动和协作能力。
随着软硬件技术的快速发展,带有多种传感器的移动机器人在相关领域得到广泛的应用,如农业采摘机器人、乒乓球机器人、无人驾驶汽车等。
在农业科技行业中,视觉伺服草莓采摘机器人[1]利用视觉图像进行果实定位,视觉曝光信号触发控制卡,图像处理获取轮廓,因采摘场景中深度信息变化不大,使得视觉定位更加有效。
在体育科技行业中,乒乓球机器人的视觉伺服系统[2]利用视觉传感器信号作为反馈,获取图像特征直方图统计,采用快速轮廓搜索算法识别乒乓球,轨迹预测算法规划回球动作,完成乒乓球人机对战或双机对战任务。
在安防行业中,基于改进ORB的巡检机器人视觉算法[3]能有效的提取感兴趣区域,并可利用云台控制得到偏移像素,使识别更加精确。
MWC飞行控制器设置说明书
感谢选用克瑞斯MWC系列飞控!本手册将引导您从零开始,逐步安装、调整和飞行,并提供一些基本技巧,让您可以轻松掌握此高性价比飞控的使用经验。
本手册将会根据MWC程序的升级进行相应更新,如有需要,请打印出来阅读。
MWC对遥控器的功能有一定要求,通道数不少于5个,其中一个为两段式或者三段式开关,需要有通道中立点和行程调整功能。
从未使用过的MWC,需按照以下步骤设置和安装好,才能开始飞行时的调试:1.烧写Bootloader到飞控上的单片机,让飞控可以自由导入程序;2.用Arduino编辑MWC程序,然后用FTDI工具把程序上传到飞控;3.安装到机架上,接好所有相关的连接线;4.飞行前用MWC GUI配置程序,对飞控进行基本设置;5.外场飞行时用电脑、蓝牙模块或者LCD模块来调整PID及其他参数。
接下来将按照以上步骤开始配置您的飞控。
1.烧写Bootloader,我们已经在测试时烧好飞控的Bootloader,否则拿到手也启动不了,更没办法刷程序,所以您不必再理会这个。
如果您的Bootloader出现问题,导致无法启动飞控,请与我们联系。
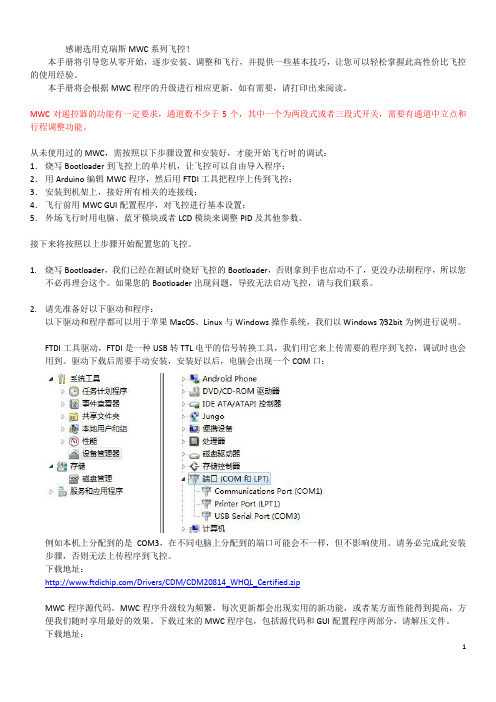
2.请先准备好以下驱动和程序:以下驱动和程序都可以用于苹果MacOS、Linux与Windows操作系统,我们以Windows 7/32bit为例进行说明。
FTDI工具驱动,FTDI是一种USB转TTL电平的信号转换工具,我们用它来上传需要的程序到飞控,调试时也会用到。
驱动下载后需要手动安装,安装好以后,电脑会出现一个COM口:例如本机上分配到的是COM3,在不同电脑上分配到的端口可能会不一样,但不影响使用。
请务必完成此安装步骤,否则无法上传程序到飞控。
下载地址:/Drivers/CDM/CDM20814_WHQL_Certified.zipMWC程序源代码。
MWC程序升级较为频繁,每次更新都会出现实用的新功能,或者某方面性能得到提高,方便我们随时享用最好的效果。
下载过来的MWC程序包,包括源代码和GUI配置程序两部分,请解压文件。
MD204L使用手册j简体中文版EW02CN02-081215

eviewmd204l用户手册第一章产品概述11功能12一般规格13各部分名称14外形尺寸及安装方法第二章编辑软件tp20021tp200概述211关于工程和画面212画面内容213tp200使用流程22编辑用户画面221创建工程222制作基本画面223md204l系统参数10224文本11225动态文本12226功能键画面跳转13227数据显示17228数据设定20229指示灯212210功能键开关量控制252211272212报警列表282213报警列表2923保存工程3024下载画面31第三章md204l操作方法31联机通讯3232切换画面3233系统口令3334修改数据3335开关量控制eviewmd204l用户手册第四章与plc的连接方法41三菱fx系列3742西门子s7200系列3843欧姆龙c系列3944光洋s系列4045施耐德neza系列4146台达dvp系列4247松下fp系列4348lgmasterk系列4449facon永宏系列eviewmd204l用户手册第一章产品概述11功能md204l是可编程序控制器的小型人机界面以文字或指示灯等形式监视修改plc内部寄存器或继电器的数值及状态
涡街流量计 电子版本: ER 2.0.0_ OPTISWIRL 4200 操作手册说明书

涡街流量计电子版本: ER 2.0.0_OPTISWIRL 4200操作手册© KROHNE 08/2017 - 4004294802 - MA OPTISWIRL 4200 R04 zh保留所有权。
未经KROHNE Messtechnik GmbH 公司事先书面授权,不得复制此文件及其任何部分。
如有更改,恕不通知。
2 08/2017 - 4004294802 - MA OPTISWIRL 4200 R04 zh版权所有 2017KROHNE Messtechnik GmbH - Ludwig-Krohne-Str. 5 - 47058 Duisburg (德国): 版本说明3 08/2017 - 4004294802 - MA OPTISWIRL 4200 R04 zh 1 安全须知61.1 软件历史 (6)1.2 用途 (7)1.3 认证 (9)1.4 压力容器指令 (10)1.5 来自制造厂家的安全须知 (11)1.5.1 版权及数据保护.............................................................111.5.2 免责条款...................................................................111.5.3 产品责任及质保.............................................................121.5.4 有关文档的信息.............................................................121.5.5 警告与符号使用 (13)1.6 操作者的安全须知........................................................132 设备描述142.1 供货范围 (14)2.2 仪表型号 (14)2.2.1 法兰型仪表.................................................................152.2.2 夹持型仪表.................................................................152.2.3 双测量系统型号和加倍的可靠性...............................................162.2.4 分体型.....................................................................162.2.5 带内缩径的仪表.............................................................172.2.6 设备描述...................................................................172.2.7 自由空气排气量检测 - FAD (可选)...........................................182.2.8 总热测量(可选)...........................................................192.2.9 净热测量(可选)...........................................................202.2.10 双密封 (21)2.3 铭牌....................................................................223 安装233.1 安装注意事项 (23)3.2 存储 (23)3.3 运输 (23)3.4 安装条件 (24)3.4.1 测量液体时应严禁的安装.....................................................253.4.2 测量蒸汽和气体时应严禁的安装...............................................263.4.3 带控制阀的管线.............................................................263.4.4 推荐安装位置 (27)3.5 最小进口直管段 (28)3.6 最小出口直管段 (29)3.7 整流器 (29)3.8 安装 (30)3.8.1 安装注意事项...............................................................303.8.2 夹持型仪表的安装...........................................................313.8.3 法兰型仪表的安装...........................................................323.8.4 分体型现场外壳的安装 (33)3.9 隔热层 (34)3.10 转动机壳 (35)3.11 旋转显示板 (36)内容4 08/2017 - 4004294802 - MA OPTISWIRL 4200 R04 zh4 电气连接374.1 安全须知 (37)4.2 连接信号转换器 (38)4.3 电气连接 (39)4.3.1 电源.......................................................................394.3.2 电流输出...................................................................394.3.3 电流输入...................................................................404.3.4 二进制输出.................................................................404.3.5 限位开关输出...............................................................414.3.6 脉冲输出 / 频率输出........................................................434.3.7 状态输出 (44)4.4 分体型的接线............................................................444.5 接地连接. (46)4.6 防护等级................................................................475 启动485.1 开机界面. (48)5.2 操作....................................................................486 操作496.1 显示和操作按键 (49)6.1.1 子菜单和功能选择的显示,3行 (50)6.1.2 参数设置的显示,4行 (51)6.1.3 预览参数时的显示,4行 (51)6.2 基本操作原理 (52)6.2.1 按键功能描述...............................................................526.2.2 从测量模式切换到菜单模式...................................................526.2.3 更改菜单中的设置...........................................................526.2.4 更改模式下的字符...........................................................536.2.5 单位,数字和常数...........................................................546.2.6 安全等级和权限 (54)6.3 最重要的功能及模块概览 (56)6.4 菜单语言 (56)6.5 气体测量选项 (57)6.6 单位 (58)6.7 菜单结构 (61)6.7.1 菜单”A 快速设置“ (61)6.7.2 菜单“B 测试” (62)6.7.3 菜单“C 设置” (64)6.7.4 菜单说明 “A 快速设置” (68)6.7.5 菜单说明 "B 测试" (75)6.7.6 菜单说明 ”C 设置“ (76)6.8 设置示例 (85)6.8.1 自由空气排气量检测-FAD 设置 (85)6.8.2 总热测量 (86)6.8.3 净热测量 (87)6.9 状态消息和诊断信息 (88)6.10 A12 分区检查 (92)5 08/2017 - 4004294802 - MA OPTISWIRL 4200 R04 zh 7 服务937.1 更换信号转换器/液晶显示屏 (93)7.2 O 型圈的维护 (94)7.3 备件可用性 (95)7.4 可提供的服务 (95)7.5 仪器送返生产厂家........................................................957.5.1 基本信息. (95)7.5.2 送返仪器时附带的表格(可复印) (96)7.6 处理....................................................................968 技术数据978.1 功能原理 (97)8.2 技术数据 (98)8.3 尺寸和重量 (103)8.3.1 法兰型 (103)8.3.2 夹持型 (110)8.3.3 分体型尺寸 (112)8.4 流量表 (113)16 08/2017 - 4004294802 - MA OPTISWIRL 4200 R04 zh1.1 软件历史对于所有仪表,根据 NE 53,“电子版本” (ER) 记录了电子设备版本状态。
四轴姿态解算
又花了将近一个星期,终于把姿态解算的框架完成了。
仅仅是把陀螺仪、加速度计、罗盘融合在一起,得出旋转姿态,没有对加速度积分,没有用到气压计,几乎没有滤波。
算是阶段性的工作吧,把框架设计得合理一点,以后添加/修改就很简单了。
从传感器的读取,到四元数的学习,到空间旋转的处理方法,循序渐进,逐个击破。
主要参考了以下资料(按阅读的时间循序):《计算机图形学几何工具算法详解》(四元数转矩阵的公式是错的!)《交互式计算机图形学——基于OpenGL的自顶向下方法》维基百科——四元数框框的日记——四元数青衫湮痕——四元数Heath's blog——四元数与欧拉角之间的转换阿莫电子论坛——【原创】姿态估计下面总结一下“姿态解算”的过程,分为“传感器”、“四元数与旋转”、“姿态解算框架”、“长期融合”、“快速融合”四部分。
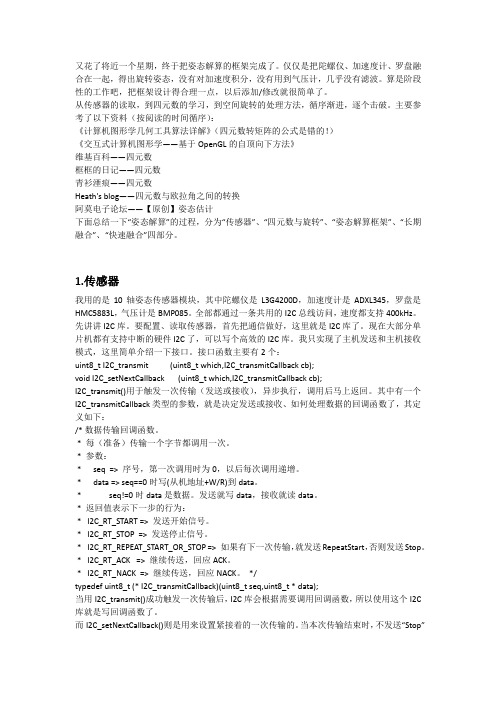
1.传感器我用的是10轴姿态传感器模块,其中陀螺仪是L3G4200D,加速度计是ADXL345,罗盘是HMC5883L,气压计是BMP085。
全部都通过一条共用的I2C总线访问,速度都支持400kHz。
先讲讲I2C库。
要配置、读取传感器,首先把通信做好,这里就是I2C库了。
现在大部分单片机都有支持中断的硬件I2C了,可以写个高效的I2C库。
我只实现了主机发送和主机接收模式,这里简单介绍一下接口。
接口函数主要有2个:uint8_t I2C_transmit (uint8_t which,I2C_transmitCallback cb);void I2C_setNextCallback (uint8_t which,I2C_transmitCallback cb);I2C_transmit()用于触发一次传输(发送或接收),异步执行,调用后马上返回。
其中有一个I2C_transmitCallback类型的参数,就是决定发送或接收、如何处理数据的回调函数了,其定义如下:/* 数据传输回调函数。
* 每(准备)传输一个字节都调用一次。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.2
焊接信息. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4
数字主要块. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.1 框图. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
L3G4200D
MEMS运动传感器: 三轴数字输出陀螺仪
特点
■ 三种可选全尺度
(±250/500/2000 dps)
■ I2 C / SPI数字输出接口 ■ 16比特率值的数据输出 ■ 两个数字输出线(中断和
LGA-16 (4x4x1 mm)
dataready)
■ 集成低和高通滤波器的用户
可选带宽
■ Embedded自检 ■ 宽电源电压,2.4 V到3.6 V ■ 低压兼容IOs, 1.8 V ■ 嵌入省电和睡眠模式 ■ 高冲击生存能力 ■ 扩展的工作温度范围
1.1 管脚描述. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2
机械和电气规范. . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1 2.2 2.3 机械特性. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 电气特性. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 通讯接口特性. . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
(-40 °C到+85 °C)
■ ECOPACK ® RoHS和“绿色”标准
(见 第6)
应用
■ 游戏和虚拟现实的输入设备 ■ 运动控制与MMI(人机
接口)
■ GPS导航系统 ■ 机械及机器人
表1.
设备摘要
订货代码 L3G4200D L3G4200DTR 温度范围(°C) -40到+ 85 包装 包装 托盘 LGA-16 (4x4x1) 编带和卷轴
3.1 术语. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.1.1 3.1.2 3.1.3 灵敏度. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 零利率水平. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 自检. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
表格清单
表格清单
表1. 表2. 表3. 表4. 表5. 表6. 表7. 表8. 表9. 表10. 表11. 表12. 表13. 表14. 表15. 表16. 设备摘要. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1 管脚描述. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6 过滤值. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7 机械特性@ Vdd = 3.0 V, T = 25 °C除非另有说明. . . . . . . . . . . . . . . . . . . . . . . . 8 电气特性@ Vdd =3.0 V, T=25 °C除非另有说明. . . . . . . . . . . . . . . . . . . . . . . . . .9 SPI 从属时间值. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10 I2C 从属时间值. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11 绝对最大额定值 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 串行接口引脚说明. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15 I2C术语. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 SAD+Read /写模式. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .16 转让时法师是记录一个字节从属 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 转让时法师是记录多个字节从属 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 转让时法师是接收(阅读)由从属 .一个字节的数据. . . . . . . . . . . . . . . . . . . . . . . .17 转让时法师是接收(阅读)多个数据字节从从属 . . . . . . . . . . . . . . . . . . . . . . . . . 17 文档修订历史. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23
6 7
包装信息. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21 修订历史. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23
2/24
L3G4200D
二月2by LoaDing
内容
L3G4200D
内容
1 框图和引脚说明. . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
5.2
SPI 总线接口. . . . . . . . . . . . . . . . . . . . . . . . . . . . .17
5.2.1 5.2.2 5.2.3 SPI阅读. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19 SPI写. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19 SPI阅读3-wires模式. . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3.1 2.3.2 SPI -串行外设接口. . . . . . . . . . . . . . . . . . . . . . . . . . 10 I2C -间IC控制接口. . . . . . . . . . . . . . . . . . . . . . . . . . 11
3
绝对最大额定值 . . . . . . . . . . . . . . . . . . . . . . . . . . . .12
说明
该L3G4200D是一种低功耗三轴 陀螺仪提供三个不同的用户 可选(±250/±500/±2000 dps).充分秤 它包括一个传感元件和一个IC接口 能够提供角速度的检测 外部世界,通过一个数字接口 (I 2 C / SPI). 传感元件是采用 专门微细加工工艺,而 IC接口技术实现了用CMOS 允许设计一个专门的电路,是 修整,以更好地匹配传感元件 特点. 该L3G4200D可在一个塑料栅格 阵列(LGA) 包装并提供了极好 温度稳定性和高分解超过一 工作温度范围扩大到(-40 °C +85 °C).
5
数字接口. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.1 I2C串行接口. . . . . . . . . . . . . . . . . . . . . . . . . . . . .15
5.1.1 I2C操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .16
3/24
图目录
L3G4200D
图目录
图1. 图2. 图3. 图4. 图5. 图6. 图7. 图8. 图9. 图10. 图11. 图12. 图13. 框图. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5 引脚连接. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5 L3G4200D外部低通滤波器值 SPI 从属 时序图(2). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 I2C 从属时序图(3) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11 框图. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14 读取和写入协议. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18 SPI阅读协议. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 读取多个字节SPI协议(2字节的例子). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 SPI写协议. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 多个字节SPI字节写入协议(2例子). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 SPI阅读3-wires模式协议. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20 LGA-16:机械数据和包装尺寸. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22