红外导航系统的设计
基于红外导航的AGV设计与实现
基于红外导航的AGV设计与实现作者:李昌斌贾方亮袁伟民武延坤来源:《现代电子技术》2013年第09期摘要:为了满足自动运行小车高效以及适用性等需求,设计了一款高性能的小车,该小车使用红外技术进行导行,ZigBee技术进行系统通信控制,光电传感器进行障碍物检测等。
通过大量实验证明,小车具有良好的性能,并能够运用到需要无人搬运操作的多种工作场合。
关键词: AGV;红外导航;自动控制; ZigBee技术中图分类号: TN911⁃34; TP2 文献标识码: A 文章编号: 1004⁃373X(2013)09⁃0124⁃030 引言自动导航车[1](Automated Guided Vehicle,AGV)是指利用电磁或者光学传感器引导小车按照设定的路线自动行驶的运输车,从而实现无人搬运的目的。
它具有自动化程度高、充电自动化、占地面积小、美观方便的优点,适用于仓储业、制造业、危险场所以及特种行业的作业,能够实现无人有效、高效、作业流程经常调整的搬运场合。
现阶段,它可采用电磁引导[2]、视觉引导[3],激光引导[4⁃5]等。
本文根据生产车间对货物搬运的具体需求,在红外检测的基础上,使用具有和运行环境有较大差别的反光材料作为小车运行导行线,实现红外导行的AGV。
1 系统结构AGV小车的系统结构如图1所示,其可划分为5个模块,分别为CPU、电机驱动、巡线传感器、运行环境检测传感器、ZigBee传输模块,其功能分别如下:CPU:该模块是整个系统的核心,主要完成处理线路检测传感器、运行环境检测传感器上传的信息,控制电机的转速以及转向,通过ZigBee模块和远程控制中心进行信息的交换等。
巡线传感器:主要利用红外传感器检测小车运行的实际线路,并将处理后的信息发送给CPU。
运行环境检测传感器:主要是检测小车运行的状态,如是否有障碍物、电池用电情况等,并将该信息返回给CPU。
电机驱动:主要为电机工作提供足够的功率,并控制其转速、转向等。
红外光学系统设计—

Binary
二元光学最早由MIT的林肯实验室于1989 年提出。
以二阶或多台阶的表面微位相结构来实现光 的变换,以衍射光学方式成像。
2007-6-19
Binary
二元光学相位原理
2007-6-19
Binary
二元元件的负色散特性
2007-6-19
Binary
2007-6-19
Binary
二元面的负热差特性
2007-6-19
Binary
应用二元面设计的红 外光学系统,这个光学 系统是为FLIR设计.
Focal length F/#
Field of view FPA
Transmission
367mm 1.6
2.5°×2° 640×512 (25μm) 7.5μm ~ 15.5μm
2007-6-19
红外光学系统设计举例
2007-6-19
谢谢!
透过率曲线
2007-6-19
Байду номын сангаас
AMTIR材料
AMTIR-1在国外应用比较广泛。它是Ge-As-Se的混合材料, 1um波长折射率为2.6055,10um波长折射率为2.4977。从透 过率曲线图看AMTIR-1材料对中波红外和长波红外有很高的透过 率,并且均匀性好。
2007-6-19
红外光学系统的分类
显微光学系统 显微光学系统在红外
中用的比较少.显微设 计中因为像比物大,直 接导致入射到单位像 元的能量降低,而红外 探测器灵敏度不高,所 以需要较大的NA来达 到响应需要.
2007-6-19
红外光学系统设计举例
非制冷探测器和制冷探测器设计区别. 在长波红外探测器中应用最为广泛的是美国和法国生产的非制 冷探测器,这种探测器价格相对较低,但噪声等效温差大,适合民 用.这种探测器需要较高的入射能量,一般设计F/#不小于1.2. 较小的F/#导致系统的前口径很大.首先大尺寸的材料制备困难, 其次大口径的镜片受到重力的影响会产生变形,导致成像不清晰. 对于更高要求的军用不适用.制冷探测器的NETD值小,一般可以 接受F/2~F/4的光圈范围,能够设计较长焦距的镜头.目前军用 较高要求的镜头都采用制冷探测器. 为了减小器件和镜筒内热辐射的影响,在探测器内部设置有冷光 栏,设计时一般要求100%冷光栏效应,也就是说使用冷屏做光 栏.在设计中会导致入瞳不在头片位置,头片的尺寸会非常大,为 此设计中都会设置中继系统以减小头片物镜的尺寸.
无线红外多路遥控发射接收系统设计与实现软件设计毕业设计 精品
毕业设计无线红外多路遥控发射接收系统设计与实现软件设计1 绪论1.3本课题的主要任务本课题的核心是设计出一个无线红外多路遥控发射/接收系统的软件。
本设计要求掌握无线红外多路遥控发射/接收系统的工作原理,本红外多路遥控发射接收是以红外线为传递信息媒体的短距离无线控制系统,可对8个受控对象的工作状态进行遥控,适用于工业,医疗,家用电器等设备的开启或关闭控制,也可以对一种设备八种工作状态进行控制或2种设备的4种工作状态进行控制。
具体要求如下:(1) 遥控距离不小于3m,即红外遥控发射机与红外接收机之间的距离不小于3m; (2) 遥控路数8路,即可对8个受控设备进行开关控制; (3) 工作频率40kHz,即红外发射和接收的载频为40kHz; (4) 发射端可显示控制路数,接收端可显示受控状态。
2 红外遥控系统简介红外遥控是目前家用电器中用得较多的遥控方式,在讲红外线遥控之前,首先讲一讲什么是红外线。
我们知道,人的眼睛能看到的可见光按波长从长到短排列,依次为红、橙、黄、绿、青、蓝、紫。
其中红光的波长范围为0.62~0.76μm;紫光的波长范围为0.38~0.46μm。
比紫光波长还短的光叫紫外线,比红光波长还长的光叫红外线。
红外线遥控就是利用波长为0.76~1.5μm之间的近红外线来传送控制信号的。
2.1系统组成框图通用红外遥控系统由发射和接收两大部分组成,应用编/解码专用集成电路芯片来进行控制操作,如图1所示。
发射部分包括键盘矩阵、编码调制、LED红外发送器;接收部分包括光、电转换放大器、解调、解码电路。
图1 红外遥控系统框图发射部分的主要元件为红外发光二极管。
它实际上是一只特殊的发光二极管,由于其内部材料不同于普通发光二极管,因而在其两端施加一定电压时,它便发出的是红外线而不是可见光。
目前大量使用的红外发光二极管发出的红外线波长为940nm左右,外形与普通发光二极管相同(见图2),只是颜色不同。
红外发光二极管一般有黑色、深蓝、透明三种颜色。
基于单片机的红外遥控系统设计毕业设计

本科生毕业设计(论文)论文题目:基于单片机的红外遥控系统设计毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:本设计是基于单片机的红外遥控系统设计,设计内容包括了红外接收,红外解码和步进电机控制三大块。
如今红外遥控技术已经得到了广泛的应用;其利用红外线来传输数据,这种情况下不需要实体连线,体积小,成本低,功能强。
我们日常生活中的电视机,洗衣机,空调,航天飞机,工业现场设备等都运用了红外遥控的技术。
本设计中发射端采用专用的发射芯片来实现红外遥控码的发射,且遥控码格式是NEC标准。
接收端采用市面上流行的1838一体化红外接收头,接收到的红外信号经由1838接收头完成光/电转化和解调的工作,然后把33位的完整码发送到解码芯片中去完成解码工作。
本设计中的主芯片是STC89C52单片机,主芯片和解码芯片之间进行串行通讯。
系统启动后,解码芯片将解码后得到的8位数据码串行发送到主芯片中,然后通过主芯片来控制步进电机的正转,反转,加速,减速。
本设计中的被控对象是步进电机,步进电机最适合做数字控制。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
红外测距系统设计(光电系统设计)

word本科生课程论文论文题目红外光电测距系统设计课程名称光电系统设计学生某某谷幸东、郭晓龙、何志毅、胡健辉学号201211911309、10、11、12所在学院理学院所在班级电科1123班指导教师汤照目录第一章绪论11.1 红外线概述11.2 红外传感器的分类11.3 红外传感器的应用21.4 AT89C52单片机概述31.5 MCP3001简介6第二章红外测距的工作原理与基本结构82.1 红外测距传感器简介82.2 红外线测距的工作原理82.4红外测距传感器接线102.5 红外测距系统的基本结构10第三章红外测距的硬件设计113.1 红外测距的实现构想113.2 系统硬件结构电路图123.3 各硬件电路设计123.3.1 复位电路123.3.2 时钟电路133.3.3 A/D转换电路143.3.4 LCD显示电路14第四章红外测距的软件设计154.1 系统软件结构框图154.2 软件程序设计164.3 源代码16第五章仿真测试215.1系统的软件的调试仿真21第六章 PCB图及元器件清单226.1 PCB图236.2 元器件清单23第七章课程设计任务分工及个人心得体会247.1任务分工247.2 设计心得体会24第一章绪论1.1 红外线概述红外辐射俗称红外线,又称红外光,它是一种人眼看不见的光线。
但实际上它和其他任何光线一样,也是一种客观存在的物质。
任何物体,只要它的湿度高于绝对零度,就有红外线向周围空间辐射。
它的波长介于可见光和微波之间。
红外辐射的物理本质是热辐射。
物体的温度越高,辐射出来的红外线越多,红外辐射的能量就越强。
研究发现,太阳光谱各种单色光的热效应从紫色光到红色光是逐渐增大的,而且最大的热效应出现在红外辐射的频率X围内,因此人们又将红外辐射称为热辐射或热射线。
目前红外发射器件(红外发光二极管)发出的是峰值波长0.88uM~0.94uM之间的近红外光,红外接收器件(光敏二极管、光敏三极管)的受光峰值波长为0.88uM~0.94uM之间,恰好与红外发光二极管的光峰值波长相匹配。
红外导航系统的设计

红外导航室内移动机器人的系统设计韩红玲1,崔志恒2(1.华北水利水电学院信息工程学院,河南 郑州450011;2.河南理工大学计算机科学与技术学院,河南 焦作454000)摘 要:移动机器人检测到电源电压较低时,给定位目标——充电装置发送无线电,充电装置收到无线电就发射红外线,对机器人进行导航。
机器人不断采集红外信号,并用软件模拟脉宽调制的方法对驱动机器人双轮的电机进行实时控制,从而实现机器人对红外的跟踪。
机器人检测到红外线信号较弱或者没有检测到红外线时,利用超声波、红外、红外光电等多种传感技术和经验丰富的专家系统进行避障、路径规划,无需图像处理,无需精确的环境模型,实现机器人以尽可能短的路径离开局部环境,快速跟踪红外线,最后准确定位于充电装置进行充电。
关键词:移动机器人;超声波;软件脉宽调制;路径规划中图法分类:TP242.6 文献标识码:BSystem Design of an Indoor Mobile Robot Navigated byInfraredHAN Hong-ling1, CUI Zhi-heng2(1.North China Institute of Water Conservancy and Hydroelectric Power, Zhengzhou 450011,China;2. Henan Polytechnic University, Jiaozuo 454000, China)Abstract:The mobile robot sends radio to a destination of power supply device when it detects that the voltage of power is insufficient. The device sends infrared to guide the robot in moving towards it as soon as it receives the radio. The robot successively collects the signals of the infrared, and the two motors that drive the bicycle of the robot are real-time controlled,which is realized by the software that simulates pulse width modulation。
一种红外图像处理系统的设计与实现
文献标识码 : A
文章编号 : 1 0 0 6 — 4 3 1 1 ( 2 0 1 3 ) 0 1 — 0 1 9 7 — 0 3
ቤተ መጻሕፍቲ ባይዱ
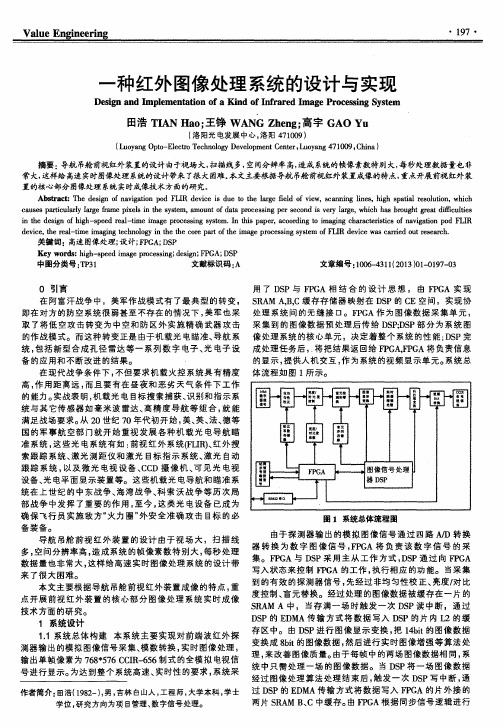
0 引 言 用了 D S P与 F P G A相 结 合 的设 计 思 想 , 由 F P G A 实 现 在阿富汗战争 中,美军作 战模式有 了最典 型的转变 , S R A M A , B , C缓存存储器 映射在 D S P的 C E空间 ,实现协 即在 对方的防空系统很弱甚至不存在 的情况下 , 美军 也采 处理 系统 间的无缝接 口。F P G A作 为图像数据 采集单 元 ,
置的核 心部 分图像处理 系统 实时成像技术方面的研 究。
Ab s t r a c t :T h e d e s i g n o f n a v i g a t i o n p o d F L I R d e v i c e i s d u e t o t h e l a r g e i f e l d o f v i e w, s c a n n i n g l i n e s , h i g h s p a i t M r e s o l u i t o n ,wh i c h
i n he t d e s i g n o f h i g h - s p e e d r e a l - t i me i ma g e p r o c e s s i n g s y s t e m.I n hi t s p a p e r , a c o o r d i n g t o i ma g i n g c h ra a c t e r i s i t c s o f n a v i g a i t o n p o d F L I R
红外测距传感器的原理与设计最终版
红外测距传感器的原理与设计摘要:现代科学技术的发展,进入了许多新领域,而在测距方面先后出现了激光测距、微波雷达测距、超声波测距及红外线测距。
为了实现物体近距离、高精度的无线测量,我采用红外发射接收模块作为距离传感器,单片机作为处理器,编写A/D转换、显示以及与PC机的通信程序,开发了一套便推式的红外距离测量系统,系统可以高精度的实时显示所测的距离,并且可以将距离量通过串口发送到PC机显示处理、本系统结构简单可靠、体积小、测量精度高、方便使用,另外本系统形成了一套完善的软硬件开发平台,可以进行扩展、移植和做进一步的开发。
关键词:红外测距;68HC11E1;A/D转换;Principle and design of the infrared distance sensor Abstract:The development of modern science and technology, into many new areas, has a laser The development of modern science and technology, into many new areas, has a laser range finder in the ranging aspects, ranging of microwave radar, ultrasonic ranging and infrared ranging. In order to achieve the objects at close range, high-precision wireless measurement, I used the infrared transmitter receiver module as the distance sensor, microcontroller as the processor to write the A / D conversion, display and communication with the PC program, developed a will to push infrared distance measurement systems, high-precision real-time system can display the measured distance, and distance measuring can be sent through the serial port to a PC display processing, the system structure is simple and reliable, small size, high accuracy, ease of use, while this system the formation of a complete set of hardware and software development platform can be extended, transplantation, and further development.Key words:Infrared distance; 68HC11E1; A / D conversion;一、绪论 (1)1.1设计背景 (1)1.2红外线简介 (1)1.3红外线传感器概述 (2)1.3.1 红外线传感器系统介绍 (2)1.3.2 红外线传感器的分类 (3)1.3.3 红外线传感器的应用 (6)二、红外测距的方法和原理 (7)2.1几种红外测距原理及选择 (7)2.1.1 相位测距原理 (7)2.1.2 PSD测距原理 (9)2.1.3 带运动机构的双象比较法原理 (9)2.1.4 时间差测距法原理 (9)2.1.5 反射能量法原理 (9)2.1.6 红外测距原理的选择 (9)2.2红外测距系统的工作原理 (9)三、红外测距的基本结构及系统框图 (11)3.1红外测距的过程 (11)3.2红外测距系统框图 (11)3.3主要元件分析 (12)3.3.1 红外线发射器件 (12)3.3.2红外线光敏二极管 (13)四、红外测距硬件电路设计 (14)4.1单片机最小系统 (14)4.2红外发射电路设计 (16)4.3红外接收放大电路设计 (17)4.4电源电路 (19)4.5数码管显示电路 (21)五、软件模块设计 (23)5.1程序设计步骤 (23)5.2软件设计框图: (23)5.3红外测距A/D转换程序 (24)六、测量精度分析 (26)[参考文献] (27)附录 (28)致谢 (28)1.1 设计背景在基础学科研究中,传感器具有突出的地位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
红外导航室内移动机器人的系统设计韩红玲1,崔志恒2(1.华北水利水电学院信息工程学院,河南 郑州450011;2.河南理工大学计算机科学与技术学院,河南 焦作454000)摘 要:移动机器人检测到电源电压较低时,给定位目标——充电装置发送无线电,充电装置收到无线电就发射红外线,对机器人进行导航。
机器人不断采集红外信号,并用软件模拟脉宽调制的方法对驱动机器人双轮的电机进行实时控制,从而实现机器人对红外的跟踪。
机器人检测到红外线信号较弱或者没有检测到红外线时,利用超声波、红外、红外光电等多种传感技术和经验丰富的专家系统进行避障、路径规划,无需图像处理,无需精确的环境模型,实现机器人以尽可能短的路径离开局部环境,快速跟踪红外线,最后准确定位于充电装置进行充电。
关键词:移动机器人;超声波;软件脉宽调制;路径规划中图法分类:TP242.6 文献标识码:BSystem Design of an Indoor Mobile Robot Navigated byInfraredHAN Hong-ling1, CUI Zhi-heng2(1.North China Institute of Water Conservancy and Hydroelectric Power, Zhengzhou 450011,China;2. Henan Polytechnic University, Jiaozuo 454000, China)Abstract:The mobile robot sends radio to a destination of power supply device when it detects that the voltage of power is insufficient. The device sends infrared to guide the robot in moving towards it as soon as it receives the radio. The robot successively collects the signals of the infrared, and the two motors that drive the bicycle of the robot are real-time controlled,which is realized by the software that simulates pulse width modulation。
In doing this, the function of the robot to track infrared is achieved. Without image processing and precise environment model, the robot avoids collision and plans routes with many kinds of sensing technologies including ultrasonic, infrared, photoelectric, and with an embedded experienced expert system when it detects no or weak signals of the infrared, and then, it quickly leaves the local place and trails the infrared in the shortest distance, and is accurately located in the power supply device lastly.Key words:mobile robot;ultrasonic;software pulse width modulation;path planning本文主要采用超声波传感器来感知机器人所在的环境信息,利用红外线进行导航,实现机器人比较准确的红外跟踪和室内定位[1]。
在利用超声波对环境进行探测时,由于超声波的角度误差,对于任意狭长通道、稠密不规则障碍物等环境,虽然现有加权平均值法、等距区域法、以及最近障碍物法、栅格图法等数据融合和环境描述法[2],但超声波对环境特征信息的感知能力依然较差。
由于移动机器人无法记忆全部先验信息,目前路径规划问题仍无完整的物理规律和物理模型。
本文融入多种传感技术,提高机器人对局部环境的感知能力,并加入嵌入式专家系统,通过不断反复实验,不断更新专家系统的知识库,让机器人从经验中不断学习,尽可能使机器人到达目的地——充电装置的路径最短。
1 硬件系统设计1.1系统组成本系统采用Atmel的AT89S52和义隆公司的EM78P156构成双MCU(Micro Controller Unit,单片机)结构(图1),AT89S52为机器人的主处理芯片,EM78P156辅助工作。
图1中,EM78P156检测到电压较低时,不断发送带Rolling Code(滚动码)的无线电给充电装置,充电装置收到无线电并解码,发射出红外线,机器人利用红外线进行导航。
检测到红外信号较弱或者没有检测到红外线时,利用左、前两路超声测距、安全碰撞开关(左、前、右共三个)、红外光电传感器避碰。
图1 机器人系统结构图1.2 超声波测距硬件设计机器人在移动过程中的避碰问题,根据左路和前路超声波测到的到障碍物的距离进行避碰。
测距用脉冲回波法,第一次收到物体反射回来的超声波与发送超声波之间的时间t乘以声音的速度v就是超声波传感器到被测物体之间距离s的2倍。
声速v=(331.5+0.607T/℃)m/s,其中T为空气温度。
超声波的发送和接收电路相当成熟,笔者采用传统的变压器耦合方式实现40k超声波的发送。
由AT89S52的P3.4端口产生40k的脉冲信号,经推挽式差分放大,变压器耦合传送频率信号给超声波传感器UCM40T发送。
UCM40T发送时由AT89S52的P3.6端口和一个三极管控制,三极管截止时,超声波发射头振动发射超声波,发送5~8个脉冲后,P3.6输出高电平,三极管一直导通,发射头立即停止振动,从而实现消除超声波的余振。
接收用UCM40R收到超声波后,用音频解码芯片LM567锁相选频,检测40khz超声波。
1.3 红外采集设计红外采集部分采用左、右两路成90°夹角红外接收头RPM-638接收,用与微控制器串口兼容的10位串行A/D转换芯片TLV1570进行模数转换,TLV1570为吞吐率1.25Mbps的高速A/D转换芯片。
左、右两路红外接收传感器,分别与机器人两轮的连线成45°夹角,保证机器人在跟踪红外时,左、右红外传感器能感知到机器人“脸部”的左、右两侧红外强弱的不同,A/D转换后,对机器人左、右两轮进行软件PWM(Pulse Width Modulation,脉宽调制)控制,实时控制左右两轮的转速,动态控制机器人的运动方向和速度,实现红外跟踪。
1.4红外光电反射式传感器的应用由于超声波传感器发散角较大,有一定的角度误差,并受物体颜色、空气温度等影响,对于房间结构较复杂、门口附近有障碍物等的环境,机器人在检测到电压较低,需快速向充电装置运动时,最难的就是对“门”、“窄通道”的识别。
这时可以红外光电反射式传感器探测。
本系统采用调制型红外光电反射,由CD4011多谐振荡器和红外发射管(波长930nm)发射出一定频率的红外光,光敏二极管接收红外后,经锁相环音频译码器LM567选频,送往具有回差滞后特性施密特比较器,检测到白色的条带时输出高电平,其它颜色时输出低电平。
这种调制型的传感器在白色条带边缘,输出状态不会发生抖动,而是快速实现状态转换。
左、右两个传感器安装于平行机器人两轮连线的底盘,间距为白条带宽度的2倍。
当机器人从和墙壁夹角<45°方向经过门口时,两个传感器可以同时输出高电平,这时转动一定的角度,就可以轻松进入另一个房间。
若和墙壁夹角≥45°方向经过门口,两个传感器不可能同时输出高电平,这时不需要转动角度,就可以进入“门口”。
2软件设计2.1 系统设计欠压(电压低于某电压值)前后设定三种状态:漫游、跟踪和中间,系统软件流程图如图2。
检测到电压不低于一定的电压值时是漫游状态,检测到低电压和外面有红外时是跟踪状态,检测到低电压,但红外较弱或没检测到,处于中间状态,根据路径规划策略,寻找红外较强的方向,快速进入跟踪状态,跟踪过程中不断检测是否已经定位,若定位就停止电机,让机器人停下来充电,充电过程中不断检测是否充电满,若机器人的电压达到某值,就后退离开充电装置,进入漫游状态,在漫游状态可以设计其它的功能。
图2 系统流程图2.2软件模拟PWM2.2.1 PWM原理机器人驱动两个轮子的电机采用桥式功放驱动,为了节约端口,用软件来实现驱动两个轮子的电机的单极性PWM控制。
PWM调速的工作原理是电枢两端的电流呈脉动连续,随着正脉冲宽度越来越窄,电枢的平均电流越来越小,电机转速也就慢下来,反之,电机转速变快。
PWM脉冲频率F T =1/T, T为脉冲周期,F T 选择不恰当,会影响电枢电流的连续性,电机运行时可能产生剧烈振荡,因此应该谨慎选择切换频率。
本系统T取20ms。
2.2.2 PWM软件实现对左右两路红外传感器接收的信号进行采集,A/D转换后,根据红外信号的强弱,对左右两轮输出的正负脉冲宽度就不一样,信号弱的一侧,正脉冲要宽一些,对应电机电枢电流就大,转速就相对另一侧快些,从而实现机器人一直向红外信号强的一侧方向运动,即可实现动态红外跟踪。
设T为PWM脉冲周期,每隔T时间采集左右红外一次,根据第n次采集到左右两侧的红外信号,计算分配给对应侧电机的正负脉冲宽度,这时,T由t1(n)、t2(n)、t3(n)三部分组成。
t1(n):左右两轮上的正脉冲宽度。
t2(n):红外较弱侧电机比另侧电机多加的正脉冲宽度。
t3(n):红外较弱侧电机的负脉冲宽度。
t2(n)+t3(n):红外较强侧电机的负脉冲宽度。
本系统在主程序对左、右“眼睛”红外信号各采集一次,实现对左右轮PWM控制的同步,然后不断给timer0的16位暂存器装t1(n),t2(n),t3(n),从而实现机器人驱动轮的电机进行软件PWM控制。
3 专家系统在路径规划中的应用在中间和漫游状态时,系统需要路径规划[3][4]人快速向充电装置发射出的红外源移动。
文中基于知识库的决策器是整个机器人软件系统设计中的一个主要部分,即“嵌入式”专家系统。
本系统采用产生式规则表示和运用专家知识,根据机器人移动过程中的所处环境的动态变化,结合数据库里的前进时间、后退时间、转角、转向、转速和中间状态时采集红外的放大倍数等参数,进行正向推理。