预演未来 一汽大众CC驾驶辅助系统解析
大众外拍模板(大众CC 二代泊车系统解析)

STEP 2
• (主配图:要前A车和CC的合 影,CC开到不A并排,表现出 侧方车辆的横向距离) • STEP 2:当找到合适的停车位 之后,仪表盘的显示屏幕会显 出该车位,提醒挂入倒档。 (小图配上仪表显示图) • 提示:CC在寻找停车位时,最 好把跟侧方车辆的横向距离控 制在0.5-1.5米之间。
STEP 4
• (主配图:自动泊车到不后车B, 最小极限的相片) • STEP 4:倒车雷达提示音响了, 表示跟后面车辆距离到了极限了, 踩住制动,把车完全停下来,然 后挂到D档,CC便会自动回方向 盘,此时同样需要踩刹车来控制 前迚的车速。提示:为安全考虑, 无论是在向前还是向后移动,驾 驶员都必需自己控制车速。
• 二,项目组成员 • 驾驶员:黄文斌 摄像:袁震
• 三,项目费用预算 • 加油费+洗车费 • 四,车辆、设备、工具 • 车辆:大众CC两辆其他车(其他车辆能摆出一字车型和非字形,戒 停车场上有合适的车位) • 其他工具:摄像机,盒尺
• 五, 项目完成时间 • 预计2012年8月15日完成
STEP 3
• (主配图:要驾驶员放开方向盘自 动泊车相片) • STEP 3:此时停稳汽车,踩住刹车 挂到R挡倒车档,双手便能完全离开 方向盘,利用脚踩住刹车来控制倒 车车速,方向盘会自动转动。(小 图仪表盘上提示) • 提示:在倒车过程中驾驶者必需留 意显示屏车辆提示,看丌到后部丌 放心,也可以切换成倒车影像,查 看后部情况。倒车过程中如遇到紧 急情况,手操控方向盘戒挄下泊车 挄键,系统便会自动解除。
过度到自动泊车的一句话,还没想好
• CC还装备了一些常规豪华车身上配备的倒车辅助设备。 比如倒车雷达和外后视镜倒车自动调节,都是一些十分 实用的倒车辅助系统。(过度的一句话,还没想好)
大众CC刷影藏功能(5053汇总)

CC1、日间行车灯开关2、倒车雷达音量调整3、锁车音4、自动落锁5、单门解锁6、迎宾座椅7、3闪变5闪8、离家功能9、回家功能10、启用光线传感器11、保养提示12、更改总里程13、遥控一键长按升窗14、雾灯转向辅助15、下雨自动关窗16、激活双后雾灯17、关闭安全带提醒18、自动解锁19、防盗报警功能20、胎压监控的开启21、下雨自动关天窗22、自动大灯灵敏度调节23、急刹车双闪24、LED亮度25、北美版行车灯功能日间行车灯开关或者如下图倒车雷达音量调整电子系统1——76辅助驻车——匹配——通过增减更改频道号为1,该通道数值大小即为前雷达音量大小,9最大,保存后通过增减更改频道号为3,该通道数值大小即为后雷达音量大小,改到最大值9后保存。
这时前后雷达音量均已大了很多。
另外,通道2可以调前雷达的音调,数字越大调越高。
锁车音46中央舒适系统——07编码控制——长编码帮助——找到字节1bit2打钩(或者移动字节找到“车门锁控制上锁确定打钩”)(若还是不行进去46或者09找到车门打开后电动车窗/天窗未激活打钩)自动落锁46中央舒适系统——匹配10——下拉菜单——自动锁单门解锁46中央舒适系统——匹配10——下拉菜单——选择性(单个)车门锁(或开启方法: 46-中央舒适系统-匹配-10-频道号03-1(未开))迎宾座椅:1,模块36,驾驶员侧座椅2,匹配3,通道位置写60,回车4,下面第二个区域里面填15,保存,执行每次熄火,开车门,座位自动后移ffice:3闪变5闪:选择模块——09中央电气系统——匹配10离家功能伴你回家功能可以在夜间锁车后,大灯继续为车主照明一段时间(奥迪品牌是雾灯亮起),离家功能和回家功能的作用差不多,当车辆解锁后大灯会自动亮起。
如果车主把车停在停车场,离家功能还可以帮助车主寻车开启:09-byte0 bit5;回家功能开启:09-byte0 bit5前提:大灯开关处于近光位,且启用光线传感器09中央电气系统——编码控制07——长编码帮助启用光线传感器开启:09-byte0 bit6(09中央电气系统——编码控制07——长编码帮助)保养提示17-匹配10-通道50填写下次保养公里数(单位为100公里)通道51为保养日期(单位为天)更改总里程17-匹配10-通道09填写公里数(单位为10KM)遥控一键长按升窗46中央便利系统-重新编码bit6舒适功能自动关闭(一键升窗在隔壁找到解决方法了,0E改成4E就行,第13和14)(或者进去46找到下图打钩)一键升窗:1、舒适系统零件号1K0 959 433 AM准备一条数据线,连上电脑,用5053软件进入到46,点击07单元,只要将原来的编码:19D8 02(08)7F2D 8405 484F 01E0 11A0改成19D8 02(48)7F2D 8405 484F 01E0 11A0,拔掉钥匙,打开车窗,然后锁车,按住锁车键不放,直到玻璃启动,放开锁车键,车窗玻璃仍然上升。
大众车系主动巡航控制系统简介
大众车系主动巡航控制系统简介王振龙【期刊名称】《汽车维修与保养》【年(卷),期】2013(000)007【总页数】5页(P71-75)【作者】王振龙【作者单位】【正文语种】中文巡航控制系统(Cruise Control System)简称CCS,该系统对汽车速度和行驶状态进行调节和控制,以减轻驾驶员的疲劳强度,提高行车安全性以及舒适性。
汽车巡航控制系统如图1所示,下文将介绍主动巡航控制系统。
一、系统简介主动巡航控制系统(Adaptive Cruise Control,自适应巡航控制系统)简称ACC,是在定速巡航系统(DCC)的基础上开发的另一种巡航系统,它能够自动保持车辆的巡航速度、保持本车与前方车辆设定的安全距离。
ACC系统提高了驾驶舒适性,减少了对油门踏板、制动踏板的操作,大大缓解了驾驶员长途驾驶的疲劳强度。
ACC系统模仿蝙蝠超声波定位飞翔的原理,使汽车按照驾驶员的意图保持与前车的距离。
车辆前方装有一个毫米波雷达传感器,用来探测前方车辆与本车的距离,如果车距大于设定值,车辆会自动加速直至达到设定车速;如果小于设定值,车辆会自动减速。
减速通过三种方式实现:①降低发动机扭矩(减小TPS开度);②换低速挡(配置AT变速器);③施加制动。
如果以上三种措施没有达到预定车速,系统将通过仪表警示灯及声音系统提示驾驶员介入实施制动,如果车距过小有碰撞的趋势,系统的警示频率将会加快,同时关闭车窗,收紧安全带,加大制动力矩。
图1 巡航控制系统示意图1.系统功能ACC系统有四大功能:①测量前方车辆车距;②测量前方车辆车速;③测量前车位置;④选择跟踪车辆。
2.工作条件ACC不是全自动驾驶系统,主要适用于高速公路和城乡公路进行前进直线行驶,只有满足下列条件才能工作:①本车前方只有一辆车;②前车距离、速度、方位角被准确测量;③系统无故障,电控单元正确分析传感器数据;④车速在30~210km/h;⑤活动物体(ACC对固定目标无法做出反应);⑥晴朗天气(恶劣天气如雨、雪、泥水,由于雷达的探测视野受到影响,故影响ACC系统的稳定性)。
大众CC自动巡航控制ACC工作原理浅析

大众CC自动巡航控制ACC工作原理浅析大众CC自动巡航控制ACC是一项高科技创新,它采用最新的技术,使车辆驾驶更加舒适安全。
在高速公路上行驶时,驾驶员只需设置车辆速度,ACC就会自动控制车速、保持安全距离并按照驾驶员的设定自动加速或减速,这使得驾驶更加轻松。
本文将对大众CC自动巡航控制ACC的工作原理进行浅析。
首先,大众CC自动巡航控制ACC的核心原理在于通过雷达系统和摄像头来采集车辆周围的信息,精确计算交通状况,从而实现自动控制车速和车距的功能。
这个系统是由一个编程控制单元和一组传感器单元组成的。
其次,当车辆驾驶员设置目标速度后,ACC就会通过传感器采集车辆周围的信号,如前面车辆的速度和距离等信息,并根据这些信息计算车辆的加速和减速的过程。
ACC将这些信息发送到编程控制单元中进行处理,并做出相应的决策。
再次,ACC自动驾驶功能的精确控制还需要摄像头的特殊功能来支持。
一般来说,摄像头会捕捉道路上的各种信息,包括车辆、路标以及终点位置等。
也就是说,它可以帮助车辆驾驶员优化路线,提高行驶效率。
最后,大众CC自动巡航控制ACC的可实现性取决于许多因素,如天气状况、路况等。
此外,ACC还需要不断更新其编程逻辑和算法才能不断提高其性能,提高车辆驾驶的可靠性和安全性。
总之,ACC是一个充满创新的技术,充分利用现代技术对车辆驾驶进行优化。
大众CC自动巡航控制ACC的工作原理描述了其自动控制车速和车距的过程。
只有了解ACC的工作原理,才能更好地掌握其驾驶技术,驾驶出更加安全的旅程。
除了控制车速和车距,大众CC自动巡航控制ACC还具有识别前方障碍物并避免碰撞的功能。
当车辆前方有障碍物时,ACC会通过摄像头和雷达对其进行识别并发出警报,提醒驾驶员采取措施避免碰撞。
另外,大众CC自动巡航控制ACC还可以根据驾驶员的行驶状况和偏好自适应地调整行驶方案。
驾驶员可以通过控制面板上的按钮更改ACC的设置,例如调整车速、跟驰距离和警告音量等。
车载CC系统功能详解(车载控制器)
停车保证
停车保证功能是为了加速进路解锁而设计的。 当ZC发出停车保证请求存在两种情况。
ZC发出停车保证请求时,发出的ZC_MAL在被取消进 路的信号机前,此时ZC在收到CC的停车保证后可以 加快进路解锁(ERC)。
ZC发出停车保证请求时CC停在信号机前,保护区段 的存在进路锁闭。ZC在收到CC的停车保证后可以解 锁保护区段进路。
CC为三取二结构。
ATP主要功能
定位 管理 防护 监督 控制
-定位列车 -管理控制模式 -防护列车 -监督列车速度 -控制车门
定位列车
检测列车速度和位移
每个检测周期检查列车的位移、速度和方向
检测信标
检测信标位置和信标有效性
完成安全定位
计算列车的位置和不确定性
检测列车速度和位移
检查加速度计数据
使用自动折返按钮进行折ቤተ መጻሕፍቲ ባይዱ操作
驾驶模式转换表
从
AM
AM
ATPM
不停车
IATPM
RM ATB
停车
停车 停车
ATPM 不停车
不停车 不停车 停车
到
IATPM 停车 停车
不停车 停车
RM 停车 转换轨不停车; 其他区域
停车
转换轨不停车; 其他区域 停车
停车
ATB 停车 停车
停车 停车
防护列车
保护列车
在多种情况下保护列车。包括受限制区域、 防止后溜、计算列车和信号机及其他列车的 距离,选择最严格的点进行保护等。
速度传感器
司机显示器
查询器天线
MR天线
车载设备布局
紧急制动
MR天线 TOD
速度传感器 CC
查询器及天线
MR无线电台 查询器主机(TIA)
一汽-大众奥迪A6L纵向和横向导向辅助系统
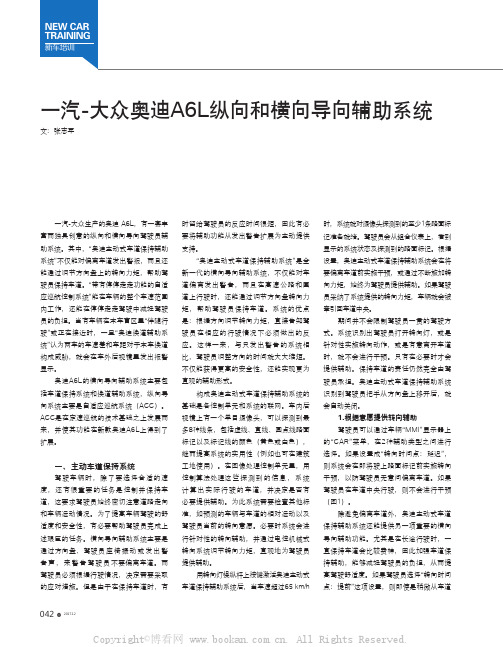
图1 设置为“转向时间点:延迟”时的辅助情况图2 设置为“转向时间点:提前”时的辅助情况
中央偏离一点,奥迪主动式车道保持辅助系统也会生成调节转向力矩,使车辆始终沿车道中央的方向行驶(图2)。
行驶期间当然主要还是靠驾驶员进行转向,奥迪主动式转向辅助系统也仅仅是通过提供微小的转向力矩进行辅助,但却能显著改善车道保持情况,并提高驾驶舒适度。
和平常一样,一旦车辆驶过某一条路面标记,就会额外通过方向盘振动向驾驶员发出警告,前提是驾驶员在MMI中激活了这一功能。
其他车辆或物体,以调整车道保持情况。
如果除配备奥迪主动式车道保持辅助系统外,车辆还配备了“自适应巡航控制系统”(ACC)或奥迪驻车辅助系统,则在进行转向干预时还会将临近车道和路缘上的情况考虑在内,因此精确度更高。
这时,系统除了注意各种边界线,还会通过雷达、摄像头和超声波传感器系统观察其他车辆和物体。
系统明确识别出驾驶员有超车意向时,不管是否使用转向灯,在驶出或驶入车道时都不会实施干预。
如果探测出本
度,在日间就无法再识别出来。
因此显示器亮度自动与外界亮度相匹配。
经过匹配后,无论是什么样的天气和时段,显示器对于驾驶员来说都是一样的亮度。
统”能够提供安全功能,这个系统自2005
年起,在A6L上不断得到改进,能够依据
情况为驾驶员提供辅助。
为能探测到车辆前后的周边环境,在
别路面标记,从而有助于更准确地确定道
路的走向。
前方车辆行驶特性的另一个指标是识
别转向灯,例如识别前方车辆是否将要换图3 基于传感器的起步监控功能。
牵引力控制和辅助系统

液压制动辅助系统 .......................................................................................... 48 液压制动助力器 .............................................................................................. 54 制动过增压 ..................................................................................................... 55 后桥充分减速功能 .......................................................................................... 56 车辆/拖车稳定 ................................................................................................ 58 防侧倾 ............................................................................................................ 60
E-ABS EBC
TCS
仅制动干预的制动系统
ADAS基础

系统:自适应巡航控制
传感器:雷达
过去十年中,豪华汽车采用了 ACC 技术,这一技术目前也在更广泛的市场上得到了应用。 传统的巡航控制技术设计用于保持车辆以恒定的车速行驶,与此不同,ACC 技术使车速与 交通状况相适应,如果与前车距离太近,则会降速,在路况允许时,会加速到上限。这些系 统通过使用安装在车辆前部的雷达来实现。 但是, 由于雷达系统不能识别某一目标的大小和 形状,而且其视场也相对较窄,因此,应用时要结合摄像机。难点在于,目前所使用的摄像 机和雷达传感器还没有标准配置。因此,还是需要灵活的硬件平台。
红外线式:上世纪 80 年代出现的以红外线的发送接收原理制成的倒车辅助系统。它最大的 缺点是红外线易受干扰,另外对深黑色粗糙表面物体的反应不灵敏。更糟糕的是,只要红外 线发射器或接收器表面被一层薄薄的冰雪或泥尘覆盖,系统就会失效。
电磁感应式:随后,出现了以电磁感应原理制成的倒车辅助系统。其检测稳定性和灵敏度比 红外线提高许多,但也有着致命性缺点,它只能动态检测障碍物。也就是说,车辆停止时, 就不能检测到任何东西。因此实用性也不如意。
一、世界第一危害——交通事故
据统计,大部分交通事故是由驾驶员引起,或者说是由人为错误造成的。驾驶辅助系统的目 的就在于使人为错误导致的事故得以避免, 在事故即将发生之前对车辆进行控制以减轻事故 造成的伤害。
>>>>辅助驾驶系统的主要目标
提高汽车主动安全
减轻驾驶员劳动强度 为自主/自动驾驶(终极目标)提供技术基础
系统:交通标志识别
传感器:摄像机
正如其名称所示,交通标志识别(TSR)功能使用前向摄像机结合模式识别软件,可以识别常 见的交通标志(限速、停车、掉头等)。这一功能会提醒驾驶员注意前面的交通标志,以便驾 驶员遵守这些标志。TSR 功能降低了驾驶员不遵守停车标志等交通法规的可能,避免了违 法左转或者无意的其他交通违法行为, 从而提高了安全性。 这些系统需要灵活的软件平台来 增强探测算法,根据不同地区的交通标志来进行调整。 传感器:IR 或者热成像摄像机
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
预演未来一汽大众CC驾驶辅助系统解析
《007》系列电影中,邦德的座驾可以称得上是智能化汽车的代表之作,
甚至在早期电影中的汽车就出现了自动驾驶等功能,这辆来自于未来的汽车成为了广大汽车迷追逐和迷恋的对象。
从现实来看,汽车技术正朝着智能化、系统化的方向发展,智能化辅助驾驶技术的应用在国内市场已初现端倪。
特别是一汽-大众推出的旗舰车型CC,凭借先进的驾驶辅助系统,成为国产汽车搭载智能驾驶辅助系统的先河。
从CC身上,我们甚至可以感受到来自未来的高级轿车的独特气息,由ACC 自适应巡航、Lane Assist车道偏移警示、Park Assist智能驻车辅助和Rear Assist倒车辅助等组成的驾驶辅助系统更像是一次对于未来高科技座驾的提前预演。
ACC自适应巡航系统
无论对于新手还是老手来说,长途驾驶都是一场劳神费力的差事,不仅需要右脚一连几个小时保持对油门的控制,还要全神贯注的注意保持和前车的安全距离和不要超速。
而随着ACC自适应巡航系统的兴起,这样的汽车驾驶方式也正在悄然改变。
作为首款装备ACC自适应巡航的国产车型,CC也在向普通消费者释放者智能化轿车的强烈信号。
当驾驶者启动CC的自适应巡航,该系统在使CC保持设置车速的同时,还能根据雷达探测信息及实际车速和预设的车距,自动调整车速,保持和前车的安全距离。
ACC自适应巡航的雷达车距传感器隐藏在CC的前车标后,用于监测正前方车辆的车距及车速。
如果和前车有追尾危险,ACC会自动向驾驶员发出警报,。