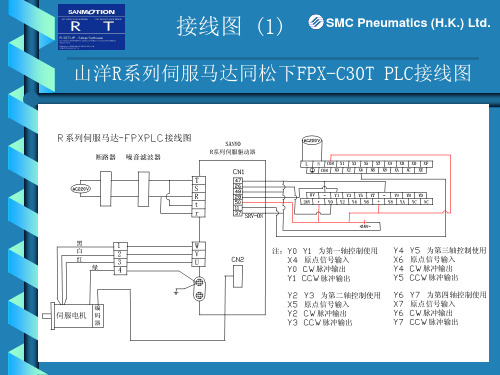
山洋R系列驱动器说明书中文版
合集下载
RS2快速入门手册

如何改参数- 4
多个参数可以通过点击 一次 “Write to amplifier” 图标保存
电机参数设定
电机参数区
1.点击“Select from the list”(M) 按钮
2. 从这个列表中选择 旋转/直线电机, 输入电压 值, 驱动器容量以及电机部分型号
3. 点击 OK 4. 点击 “Write to amplifier” 图标 (与其他参数设置一样)
1000
2000 [pulse]
3. I/O 接线(驱动器 CN1)
• 通用输入(伺服ON,报警清除,极限) • 脉冲指令输入(位置指令) • 模拟指令输入(速度,扭矩指令)
通用输入接线: CONT1-6 - 1
控制器单元 伺服驱动器
CONT-COM
50 CONT1 37 36 2.2kohm 4.7kohm
AL.A2.0
报警发生时驱动器的状态
0: 控制电源ON 2: 主电源ON
4: 准备伺服使能
8: Servo-ON(伺服使能)
报警代码
报警代码表在操作说明书第8章
“AL” 指它显示报警代码
常见报警代码: 85
检查编码器接线 •电缆连接器在放大器端
•如果使用编码器延长线、延长线上所有端子和其他侧面接口
“P“ ->
05 06
串行编码器分辨率 备用电池式绝对编码器功 能选择 控制模式选择
选择编码器分辨率. 06:131072_FMT (大部分编码器是 131072 脉冲/转.) 选择是否连接编码器的备用电池. 电池安装在山洋电气标准选配电缆之上. 连接电池-> 00:Absolute system 不连接电池 -> 01:Incremental system 选择控制器的命令类型. 00:Torque (模拟电压) 01:Velocity (模拟电压) 02:Position (脉冲指令)
三洋伺服电机RS1快速入门手册29页PPT文档
四.通常参数,第9组参数。
1.Page00:正转超程功能。 说明:当伺服马达处于正超程状态时,改变设置则可。 0C:当通用输入CONT6为ON时启动该功能 0D:当通用输入CONT6为OFF时启动该功能
2.Page01:反转超程功能。 说明:当伺服马达处于负超程状态时,改变设置则可。 0A:当通用输入CONT5为ON时启动该功能 0B:当通用输入CONT5为OFF时启动该功能
3.Page15: GER1电子齿轮1 。 说明:设定值为初始1:1时,马达转一圈的脉冲是131072个脉
冲。通常将该参数的分子设定为13107,分母设定乘以10即为马 达转一圈的脉冲数。
SMC Pneumatics (H.K.) Ltd.
四.通常参数,第8组参数(图例) 。
SMC Pneumatics (H.K.) Ltd.
2.选择编码器类型。 page 01:00表示增量式的编码器,01表示绝对式的编码器。
3.选择控制方式。一般选择:02。 page 08:00:转矩控制模式,03:速度控制-转矩控制切换 01:速度控制模式,04:位置控制-转矩控制切换 02:位置控制模式,05:位置控制-速度控制切换
4.再生电阻选择。一般选择:00。 page 0b:00:没有连接再生电阻,01:使用内置再生电阻, 02:使用外部再生电阻。
3.Page05:伺服ON功能。改变该值可以选择是否需要伺服ON信号。 说明:02:当通用输入CONT1为ON时启动该功能。 03:当通用输入CONT1为OFF时启动该功能
SMC Pneumatics (H.K.) Ltd.
一.设定通信参数,与伺服马达驱动器连线。
SMC Pneumatics (H.K.) Ltd.
一.设定通信参数,与伺服马达驱动器连线。
1.Page00:正转超程功能。 说明:当伺服马达处于正超程状态时,改变设置则可。 0C:当通用输入CONT6为ON时启动该功能 0D:当通用输入CONT6为OFF时启动该功能
2.Page01:反转超程功能。 说明:当伺服马达处于负超程状态时,改变设置则可。 0A:当通用输入CONT5为ON时启动该功能 0B:当通用输入CONT5为OFF时启动该功能
3.Page15: GER1电子齿轮1 。 说明:设定值为初始1:1时,马达转一圈的脉冲是131072个脉
冲。通常将该参数的分子设定为13107,分母设定乘以10即为马 达转一圈的脉冲数。
SMC Pneumatics (H.K.) Ltd.
四.通常参数,第8组参数(图例) 。
SMC Pneumatics (H.K.) Ltd.
2.选择编码器类型。 page 01:00表示增量式的编码器,01表示绝对式的编码器。
3.选择控制方式。一般选择:02。 page 08:00:转矩控制模式,03:速度控制-转矩控制切换 01:速度控制模式,04:位置控制-转矩控制切换 02:位置控制模式,05:位置控制-速度控制切换
4.再生电阻选择。一般选择:00。 page 0b:00:没有连接再生电阻,01:使用内置再生电阻, 02:使用外部再生电阻。
3.Page05:伺服ON功能。改变该值可以选择是否需要伺服ON信号。 说明:02:当通用输入CONT1为ON时启动该功能。 03:当通用输入CONT1为OFF时启动该功能
SMC Pneumatics (H.K.) Ltd.
一.设定通信参数,与伺服马达驱动器连线。
SMC Pneumatics (H.K.) Ltd.
一.设定通信参数,与伺服马达驱动器连线。
山洋驱动器说明
·改变参数使之适合单相输入驱动器
(模式4-第8页PSKD)
报警状态
7段LED显示
报警代码
ALM8,4,2,1
缩写
报警名称
报警清除
报警内容
1100
SE
速度控制错误
可以
速度控制不能正常工作
报警代码中的0,1表示:当Func2/ bit7,6=“0,0”时,“0”=输出断路 ,“1”=输出短路。
报警出现时的运转状态
报警代码中的0,1表示:当Func2/ bit7,6=“0,0”时,“0”=输出断路 ,“1”=输出短路。
报警出现时的运转状态
运转状态
可能的故障原因
1
2
3
4
5
6
7
8
9
10
11
12
13
当控制电源接通时
○
在伺服ON时的停止期间
○
○
在指令开始输入时
○
△
○
○
○
○
△
○
△
在高速启动或者停止时
○
○
△
当时电机已经启动或者停止
△
△
△
○
运转一小段时间以后
△
△
△
○
检修措施:
故障原因
1
·驱动器和电机之间的U,V,W相出现短路或者接地。
·驱动器和电机之间的U,V,W相没有连接或者连接失败。
检查驱动器和电机之间的线路
更正或者更换电线
2
伺服电机的U,V,W相短路或者接地
更换伺服电机
3
PC主板有缺陷
电源模块有缺陷
维护
8.1故障检修(有报警时)-----------------------------------------8-2
(模式4-第8页PSKD)
报警状态
7段LED显示
报警代码
ALM8,4,2,1
缩写
报警名称
报警清除
报警内容
1100
SE
速度控制错误
可以
速度控制不能正常工作
报警代码中的0,1表示:当Func2/ bit7,6=“0,0”时,“0”=输出断路 ,“1”=输出短路。
报警出现时的运转状态
报警代码中的0,1表示:当Func2/ bit7,6=“0,0”时,“0”=输出断路 ,“1”=输出短路。
报警出现时的运转状态
运转状态
可能的故障原因
1
2
3
4
5
6
7
8
9
10
11
12
13
当控制电源接通时
○
在伺服ON时的停止期间
○
○
在指令开始输入时
○
△
○
○
○
○
△
○
△
在高速启动或者停止时
○
○
△
当时电机已经启动或者停止
△
△
△
○
运转一小段时间以后
△
△
△
○
检修措施:
故障原因
1
·驱动器和电机之间的U,V,W相出现短路或者接地。
·驱动器和电机之间的U,V,W相没有连接或者连接失败。
检查驱动器和电机之间的线路
更正或者更换电线
2
伺服电机的U,V,W相短路或者接地
更换伺服电机
3
PC主板有缺陷
电源模块有缺陷
维护
8.1故障检修(有报警时)-----------------------------------------8-2
日本山洋—中文AC伺服R+P样本
电源高次谐波对策
标准装备有DC扼流圈连接端子作为电源高次谐波对策 用。
AC SERVO AMPLIFIER
R
RS1A100A
MODE
/WR
T S R t r
DL1 DL1 DL2
DL2 P RB1 RB2
CHARGE
POWER
P C
C N A
R
AC SERVO AMPLIFIER
C N 1
C N B
传感器组合种类 01 ·· 省配线型增量编码器
適用馬達編碼 P1系列
1B‥‥‥ P10B13100B 1C‥‥‥ P10B13150B 1D‥‥‥ P10B18200B
P5系列
M3‥‥‥ P50B04010D M5‥‥‥ P50B05020D MT‥‥‥ P50B07040H MF‥‥‥ P50B08075H MG‥‥‥ P50B08100H
自动调谐
通过采用了新算法的惯性恒等功能和5种自动调谐特 性选择、30级响应性设定或利用参数的自动保存功 能,可实现提高响应性的自动调谐。
试运转功能(微动功能)
搭载有能够确认马达和放大器间连接的微动功能,不 必与上位装置连接,便能进行试运转。
速度指令值
调谐开始
速度检出值
AC SERVO AMPLIFIER
C
参数的设定 位置、速度和转矩监控波形
˞
※PC计算机连接用电缆 型号:AL-00490833-01 (任选件)
4
可提高系统的精度,并缩短周期时间
高响应
使用能减小相位滞后的4级陷波滤波器,可以抑制机 械系统的共振,并提高装置的速度响应性。
减振控制
利用前馈减振控制,可通过简单的调整来抑制机械前 端的振动和机架的振动。 同时,能够设定并选择使用4种用以控制振动的频率。
山洋RS1伺服调试快速入门手册

如果出现“Not Connected”, 检查电源或驱动器与电脑的 连接线,然后回到幻灯片 “连接驱动器-1”,按提示 操作。
点击 “Connected”
点击”Exit”完成设 点击”Exit”完成设 ”Exit” 置
马达参数设置-1
点击Parameter 选择Motor 点击Parameter ,选择Motor Parameter Setting
点击 “ Execute”
点击“OK” 点击“OK”完成操 作
脉冲点动- 2
2. 点击此键开始设置 1. 选择此项 3. 设定运行脉冲值 4. 设定速度值
点击“Write” 5. 点击“Write” 键
点击“ ON” 5. 点击“Servo ON”开始马达励磁
脉冲点动- 3
点击“ 点击“Servo OFF ”键停止马 达励磁
转矩控制模式
06 07 08 09 0A
: : : : :
131072 p/r ( 17 bit ) 262144 p/r (18 bit ) 524288 p/r ( 19 bit ) 1048576 p/r ( 20 bit ) 2097152 p/r (21 bit )
选择控制模式
00 : 转矩 / 01 : 速度 / 02 : 位置 / 09 位置环 编码器设置 外部编码器 分辨率设置 再生电阻设置
点击“ Execute” 点击““ Execute”
点击”OK”完成操 点击”OK”完成操 ”OK” 作
速度点动 - 2
1. 选择此 项 点击“Exit” 2. 点击“Exit”更改运行速度
4.点击“Edit” 4.点击“Edit”键 点击
3. 设定速度值
点击“ ON” 5. 点击“Servo ON”开始马达励磁
山洋伺服电机RS2快速入门手册

Positioning Operation - 6
电机运行多少次(0表示无限次,需要点停止按钮来 停止运动) 动作和动作之间的停留时间
例: PJOG位置命令= 1000 [脉冲] 停止时间= 1000 [ms] 连续次数= 2 起始位置:0 [脉冲] 按“正方向”按钮
0 [pulse] 等待 1000 [ms] 1000 停止
如何更改限位输入设定 - 1
参数 参数设定 Group 9 [功能]
“00 F-OT Positive Over Travel Function” : 正向一侧限位开关设定 “01 R-OT Negative Over Travel Function” : 反向一侧限位开关设定
如何更改限位输入设定 - 2
重新建立通信需要在驱动器电源打开后。 1 2 已建立
电源打开后,查看驱动器前面的 7段 LED 数码管。 控制电源已连接并供电,无报警,打开主电源
控制电源和主电源都已经连接并供电,无报警。驱动器准备 servo-on(伺服使能)。
故障排除: 故障排除: 当驱动器仍显示 “AL.###”...
“AL.###” (#:16进制数) 表示报警代码。 例:
点击 “Servo On”,电机准 备运行 7段数码管的动作像在写 “8” 字。
点击一次此按钮, 电机正向运行, 并且在到达设定距离后停止。
点击一次此按钮, 电机反向运行, 并且在到达设定距离后停止。
定位操作 - 5
运行2次,3次或3次以上的一次点击... 1. 点击这里
2.多出两个参数出现在这 里
1. 初始设置
• • • • • • 建立通信 系统参数设定 如何改参数 电机参数设定 初始参数设定后 故障排除
山洋伺服R系列说明书 第3章

和通用输入电路连接的示例
通用输入电 CONT1 ̄CONT6[输入电路 双向光电耦合器].与继电器或集电极开路
的半导体回路连接。
.电源电压范围:DC5V ̄24V.最小电流值:100mA通用输入电路 CONT7 . CONT8
[输出电路:线路接收器]上位装置线路驱动器的输出
.连接线路驱动器。
.适应线路驱动器:相当于日产的HK26C31
.必须连接SG、在未连接的情况下,有时.
因干扰而造成误动作及损坏。
上位装置集电极开路的输出
.和集电极开路的半导体连接。
伺服驱动器
伺服驱动器
伺服驱动器
双绞
双绞
双绞
双绞
上位装置上位装置上位装置3-14
[
]。
山洋伺服参数设定

○ ○ ○ △ △ △ △ △ △
负载惯量比,增加此参数可以增大机械刚性.
GENERAL GENERAL GENERAL GENERAL GENERAL GENERAL
08 08 08 09 09 09
11 13 15 00 01
根据实际选择控制指令脉冲形式:00为正转脉冲加逆 转脉冲,01为90度相位差,02为脉冲加方向
调谐模式设为02时有效,根据实际需要调整位置环增 益,增大会加快反应速度,范围1~3000 调谐模式设为02时有效,根据实际需要调整速度环增 益,增大会加快反应速度,范围1~2000 调谐模式设为02时有效,根据实际需要调整速度环积 分时间,值越大马达定位的时间越长,范围0.5~1000
╳ ○ ○ △ △ △ △ △ △
GENERAL
0C
00
00
01
╳
○
注:“○”为必须设置项;“△”为根据实际需要选设项;“╳”为不适用 以上通常用到的伺服马达参数,若有不明白或者其它参数请参考使用说明书 编码器接线: 粉红---1 紫色---2 棕色----13 蓝色---14 红色---19 黑色---20 是否有干扰判断: 观察Monitor display中OA,OC项数据是否相等,0C为外部输入的脉冲.如果PLC没有发脉冲时此值有变化,说明有外部干扰
调整R 系列山洋伺服马达参数说明
PARAMETER GROUP NO FROM TO DESCRIPTION Q系列马达 R系列马达 ○ ○ MOTOR 根据实际选择伺服电机型号 ○ ○ SYSTEM 00 00 * 选择电源类型:00为三相电源,01为单相电源 选择电机编码器类型:00为增量式,01为绝对 SYSTEM 01 00 * ○ ○ 式,一般Q马达设为00,R马达设为01 SYSTEM SYSTEM SYSTEM GENERAL GENERAL GENERAL GENERAL GENERAL GENERAL 00 00 01 01 01 01 05 08 0B 00 02 02 13 14 15 00 01 02 00 5 30 50 20 100 06 02 00 * * * * * * 设定绝对式编码器分解能:06为17it/131072分 割 选择控制方式:00为力矩控制,01为速度控 制,02为位置控制 是否采用再生电阻:00不使用,01使用内置, 02使用外置 设置调谐模式:00自动调谐,01自动调谐 (JRAT手动设置),02手动调谐 设置自动调谐应答性:范围1~30
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
˙Ϊ 齿Ϡ轮ͷ的औ安Γ装·͚·ɾ·ɾ·ɾɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·̎ʵ̒
˙ػ相ց关ͱ机ͷ械݁的߹结ɾ合ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾɾ·ɾ·ɾ·ɾ·ɾ·ɾ·̎ʵ̒
˙औ允许ڐ承༰受ՙ负ॏ载ɾ ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·̎ʵ̔
̎ɽ安औ装Γ ͚ <[α伺ʔ服Ϙ驱Ξ动ϯ器ϓ]>
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
ର即ྲྀ使ɼ是对ࣹͳ流Ͳ或ʹ者Α辐Δ射Թ造্成ঢ温͕度ߟ͑的Β上Ε升Δ,߹都Ͱ必须ɺ保αʔ证Ϙ伺Ξ服ϯ驱ϓͷ动ۙ器͘的附ඞͣ近的ˆ温Ҏ度Լʹ在ͳ55Δ℃Α以͏ʹ下͠。
·͢ɻ
ࢦ在ఆ规͞定Εͨ的环ڥ境下݅ൣ使ғ用Ͱ。༻͍ͯͩ͘͠͞ɻ
མ不Լ要͞坠ͤ地ͨΓ或ɺ用ڧ重͍物িܸ击Λ打༩装͑置ͨΓ。͠ͳ͍Ͱͩ͘͞
͍ɻ
ଛ若ই有ɺ损ࡌ伤෦,请͕在ഁଛ安͠装ͯ或͍操Δ作前ɺ返ઃ回ஔɺ我ӡ公స司͠修ͳ α请ʔ不Ϙ要Ξ在ϯϓ伺服෦驱ʹ动Ͷ器͡内ۚ部ଐ混ย入ͳ金Ͳͷ属ಋ片ి等ੑ导
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
˙ α伺ʔ服Ϙ驱Ξ动ϯ器ϓ安ͷ装औ时Γ请注͚意࣌下ʹ列࣍的ͷ事项ʹ。ҙ͍ͯͩ͘͠͞ɻ
ॾ注意ҙ事ࣄ项߲
ෆ͓请附೩Α安近ͼ装容ʹՄ到易औ೩Γ不引ۙ易起͚͘燃火ͯ烧灾͘ͷͩऔ处。͞Γ, ͍安ɻ͚装Մ೩ɺ在Ր易ࡂ燃ͷͷ或ݪऔҼΓ易ͱ燃ͳ͚物Γɺ 不也αམʔͱ要不Ϙ͠践要Ξͨ踏使ϯΓ伺其ϓ͠ͷͳ服坠্͍驱地ʹͰ动。͘器 ͬͩͨ͞或Γ͍放ɺɻॏ置͍重物ͷ在Λ上ͤ面ͨ,Γɺ
͍理Ͱ。 ࣾฦ٫͠मཧΛ͓͜ͳ͍ͬͯͩ͘͞ɻ
࣭电 ͓或Αͼ易燃Մ೩物。͕ ࠞೖ͠ͳ͍Α͏ʹ͍ͯͩ͘͠͞ɻ
若ظ长ؒ时อ间͞保Ε管ɺ没用༻͠使ͳ用͔的ͬ话ͨ,α请ʔϘ与Ξ我ϯ公ϓ司咨ɺ 询ࣾ。· Ͱ͓͍߹Θ͍ͤͩ͘͞ɻ
安装Ϙ安ο在装Ϋ电在ε器电ऩ箱器ೲ内箱࣌时内 时
Ϙ由ο于Ϋ内ε部Թ机器的ɺ电ଂ耗͞及Ε箱Δ体ػ的ثͷ尺ి寸ྗ在大ଛ小ࣦ͓因Α素ͼ的Ϙ影οΫ响ε,ͷ导େ致͖͞机ͳ箱Ͳ内ʹ的Αͬ温ͯ度ɺ比֎外ؾԹ界的Α温Γ度ߴ͘高ͳ Δʹ很确 ͜ͳ多保ͱΔ。长͕Α考寿͋͏Γ ʹ虑命· ͠机,͢ ͯ箱高ɻ ͘的可Ϙ ͩ大靠ο ͞Ϋ ͍小性ε ɻ冷,ͷ ͳ却建େ ͓系议͖ ɺ͞ 统温ɺ ण及 度ྫྷ໋摆在٫ɺ放4ߴٴ0ͼ৴,℃པ伺以ஔੑ服下ΛΛ驱进ߟྀ֬อ动行͢͠器使ͯΔ周用ɺͨ围。ඞΊͣʹ的 αɺ温ʔԹ度Ϙ必Ξϯ须ϓˆ在ͷҎ5पԼ5℃ลͰԹ͓以下͕͍,ʹ为ˆͳҎΔ了Լ͜
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
˙൫盘内ͷ的配ྻ列条݅件ɾ ·ɾ·ɾ·ɾ·ɾɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·̎ʵ̏
α伺ʔ服Ϙ电Ϟ机ʔλ·ɾ·ɾ·ɾ·ɾ·ɾ·˙防 ਫ水ɾ、防ਖ尘ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ̎ʵ̑
˙อ保ޢ护Χ防ό护ʔ罩ͷ的ઃ设ஔ置ɾ·ɾ·ɾ·ɾ·ɾɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·̎ʵ̑
ͱΛ͓͢͢Ί͠·͢ɻ
ۙ附͘近ʹ有ৼ振ಈ动ݯ源ͷ的͋Δ场合߹
γϣοΫΞϒκʔόΛհͯ͠ϕʔεʹऔΓ͚ͯɺৼಈ͕αʔϘΞϯϓʹΘΒͳ͍Α͏ʹͯͩ͘͠͞
͍通ɻ过减震器把伺服驱动器安装在底座上,使得震动不会直接传给伺服驱动器。
ۙ附͘近ʹ有ൃ发热ମ体ͷ͋的Δ场合߹
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
̎ষ
<[औ安Γ装] ͚>
伺α服ʔϘ驱Ξ动ϯ器ϓ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ̎ʵ̍
˙औ安 Γ装方͚法ํ和安ͱ装औ场所Օ·ॴ·ɾɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·̎ʵ̏
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
˙ػ相ց关ͱ机ͷ械݁的߹结ɾ合ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾɾ·ɾ·ɾ·ɾ·ɾ·ɾ·̎ʵ̒
˙औ允许ڐ承༰受ՙ负ॏ载ɾ ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·̎ʵ̔
̎ɽ安औ装Γ ͚ <[α伺ʔ服Ϙ驱Ξ动ϯ器ϓ]>
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
ର即ྲྀ使ɼ是对ࣹͳ流Ͳ或ʹ者Α辐Δ射Թ造্成ঢ温͕度ߟ͑的Β上Ε升Δ,߹都Ͱ必须ɺ保αʔ证Ϙ伺Ξ服ϯ驱ϓͷ动ۙ器͘的附ඞͣ近的ˆ温Ҏ度Լʹ在ͳ55Δ℃Α以͏ʹ下͠。
·͢ɻ
ࢦ在ఆ规͞定Εͨ的环ڥ境下݅ൣ使ғ用Ͱ。༻͍ͯͩ͘͠͞ɻ
མ不Լ要͞坠ͤ地ͨΓ或ɺ用ڧ重͍物িܸ击Λ打༩装͑置ͨΓ。͠ͳ͍Ͱͩ͘͞
͍ɻ
ଛ若ই有ɺ损ࡌ伤෦,请͕在ഁଛ安͠装ͯ或͍操Δ作前ɺ返ઃ回ஔɺ我ӡ公స司͠修ͳ α请ʔ不Ϙ要Ξ在ϯϓ伺服෦驱ʹ动Ͷ器͡内ۚ部ଐ混ย入ͳ金Ͳͷ属ಋ片ి等ੑ导
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
˙ α伺ʔ服Ϙ驱Ξ动ϯ器ϓ安ͷ装औ时Γ请注͚意࣌下ʹ列࣍的ͷ事项ʹ。ҙ͍ͯͩ͘͠͞ɻ
ॾ注意ҙ事ࣄ项߲
ෆ͓请附೩Α安近ͼ装容ʹՄ到易औ೩Γ不引ۙ易起͚͘燃火ͯ烧灾͘ͷͩऔ处。͞Γ, ͍安ɻ͚装Մ೩ɺ在Ր易ࡂ燃ͷͷ或ݪऔҼΓ易ͱ燃ͳ͚物Γɺ 不也αམʔͱ要不Ϙ͠践要Ξͨ踏使ϯΓ伺其ϓ͠ͷͳ服坠্͍驱地ʹͰ动。͘器 ͬͩͨ͞或Γ͍放ɺɻॏ置͍重物ͷ在Λ上ͤ面ͨ,Γɺ
͍理Ͱ。 ࣾฦ٫͠मཧΛ͓͜ͳ͍ͬͯͩ͘͞ɻ
࣭电 ͓或Αͼ易燃Մ೩物。͕ ࠞೖ͠ͳ͍Α͏ʹ͍ͯͩ͘͠͞ɻ
若ظ长ؒ时อ间͞保Ε管ɺ没用༻͠使ͳ用͔的ͬ话ͨ,α请ʔϘ与Ξ我ϯ公ϓ司咨ɺ 询ࣾ。· Ͱ͓͍߹Θ͍ͤͩ͘͞ɻ
安装Ϙ安ο在装Ϋ电在ε器电ऩ箱器ೲ内箱࣌时内 时
Ϙ由ο于Ϋ内ε部Թ机器的ɺ电ଂ耗͞及Ε箱Δ体ػ的ثͷ尺ి寸ྗ在大ଛ小ࣦ͓因Α素ͼ的Ϙ影οΫ响ε,ͷ导େ致͖͞机ͳ箱Ͳ内ʹ的Αͬ温ͯ度ɺ比֎外ؾԹ界的Α温Γ度ߴ͘高ͳ Δʹ很确 ͜ͳ多保ͱΔ。长͕Α考寿͋͏Γ ʹ虑命· ͠机,͢ ͯ箱高ɻ ͘的可Ϙ ͩ大靠ο ͞Ϋ ͍小性ε ɻ冷,ͷ ͳ却建େ ͓系议͖ ɺ͞ 统温ɺ ण及 度ྫྷ໋摆在٫ɺ放4ߴٴ0ͼ৴,℃པ伺以ஔੑ服下ΛΛ驱进ߟྀ֬อ动行͢͠器使ͯΔ周用ɺͨ围。ඞΊͣʹ的 αɺ温ʔԹ度Ϙ必Ξϯ须ϓˆ在ͷҎ5पԼ5℃ลͰԹ͓以下͕͍,ʹ为ˆͳҎΔ了Լ͜
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
˙൫盘内ͷ的配ྻ列条݅件ɾ ·ɾ·ɾ·ɾ·ɾɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·̎ʵ̏
α伺ʔ服Ϙ电Ϟ机ʔλ·ɾ·ɾ·ɾ·ɾ·ɾ·˙防 ਫ水ɾ、防ਖ尘ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ̎ʵ̑
˙อ保ޢ护Χ防ό护ʔ罩ͷ的ઃ设ஔ置ɾ·ɾ·ɾ·ɾ·ɾɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·̎ʵ̑
ͱΛ͓͢͢Ί͠·͢ɻ
ۙ附͘近ʹ有ৼ振ಈ动ݯ源ͷ的͋Δ场合߹
γϣοΫΞϒκʔόΛհͯ͠ϕʔεʹऔΓ͚ͯɺৼಈ͕αʔϘΞϯϓʹΘΒͳ͍Α͏ʹͯͩ͘͠͞
͍通ɻ过减震器把伺服驱动器安装在底座上,使得震动不会直接传给伺服驱动器。
ۙ附͘近ʹ有ൃ发热ମ体ͷ͋的Δ场合߹
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
̎ষ
<[औ安Γ装] ͚>
伺α服ʔϘ驱Ξ动ϯ器ϓ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ̎ʵ̍
˙औ安 Γ装方͚法ํ和安ͱ装औ场所Օ·ॴ·ɾɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·̎ʵ̏
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818