电机转速测量系统
精密电机转速测量的FPGA系统设计
2 0l 3年
仪 表 技 术 与 传 感 器
I n s t r u me n t T e c h n i q u e a n d S e n s o r
2 0 l 3
No. 8
第 8期
精 密 电机转 速 测 量 的 F P G A 系统 设 计
张 海涛 , 谷 玉海 , 徐 小力 , 李 江 洁
测量。
关键词 : F P G A; 精 密 电机 ; 转速
中图分类号 : T P 2 7 3
文献标识码 : A
文章编号 : 1 0 0 2—1 8 4 1 ( 2 0 1 3 ) 0 8— 0 1 0 8— 0 3
FPGA. . b a s e d Pr e c i s i o n . . Mo t o r S p e e d Me a s u r e me n t S y s t e m
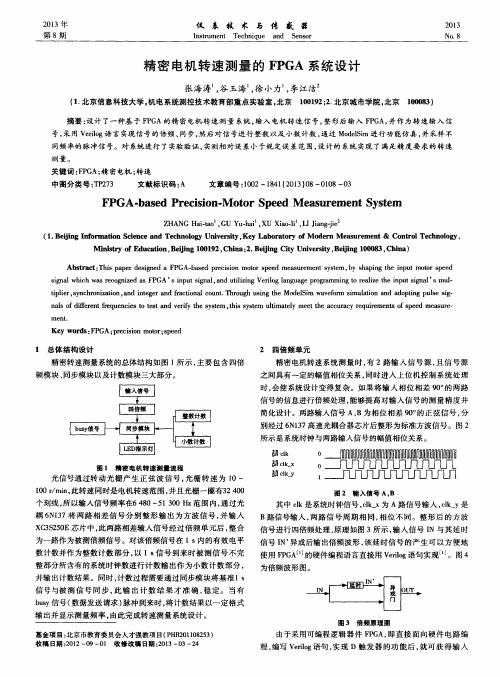
号, 采用V e r i l o g 语 言 实 现 信 号 的倍 频 、 同步 , 然后 对信 号 进 行 整 数 以 及 小数 计 数 , 通过 M o d e l S i m进行功能仿真 , 并 采 样 不
同频率的脉冲信号 。对 系统进行 了实验验证 , 实测相 对误 差小 于规 定误 差 范围 , 设计 的 系统 实现 了满足精 度要 求的转速
霍尔电机转速测量系统制作与调试.
教学总结 作业习题
完成霍尔电机转速测量系统制作与调试的实训报告
预习内容
(J8)与直流电机测速模块的 cone10 接口连接, 把“磁敏传感器应用模块”上的 SP1 用跳线接到底 板上的数字转速表/频率计单元的 IN 端口上并设置 为转速表模式。 (2)检查各相关线路,接通实训平台电源,用数字万用 表测量磁敏传感器应用模块的供电电压(+5V)是 否正常。 (3)把拨动开关 SW1 拨到右侧(模拟控制),利用调速旋 钮 RP1 控制直流电机转速,观察转速表数据,记录 在表中。 (4)使用示波器观察 ES314 霍尔传感器的输出波形。 (5)把 SW1 拨到左侧(PWM 控制),用 20P 排线将传感器 J1 接口与智能显示终端 J2 接口相连接,开启电源, 通过按键 K1 与 K2 调节电机转速,观察智能显示终 端显示的转速并记录。
磁敏传感器与应用技术电子教案
第6章 第5节 第2讲
授课教师:苏全
教学内容
霍尔电机转速测量系统制作与调试
备注
教学类型 教学目标
重点难点
理论□ 实训■ 其他□ (1)了解霍尔效应、霍尔传感器 (2)熟悉霍尔传感器的工作原理 (3)掌握霍尔电机转速测量系统制作及调试方法 (1)霍尔传感器 ES314 内部结构及功能 (2)霍尔电机转速测量系统制作及调试
教学方法与手段 教学组织与实施
引导文法、教中学、学中做,PPT 1. 问题引导 (1)从电机转速的测量方法引入霍尔元件测量转速方案 (2)讲解霍尔传感器测转速的原理 2. 教学内容
霍尔传感器是根据霍尔效应制作的一种磁场传感器。 利用霍尔传感器测量电机转速时,可在电机主轴上相连的 码盘上安装一个磁钢,当电机旋转时,磁钢经过霍尔传感 器,其可以直接输出脉冲信号,送数字转速表/频率计单 元中进行显示,也可计算单位时间内的脉冲数,再换算出 转速。 (1)用 16P 排线将磁敏传感器应用模块的电机模块接口
基于单片机的电机转速测量系统设计_(附图及源程序)

摘要在工程实践中,经常会遇到各种需要测量转速的场合,测量转速的方法分为模拟式和数字式两种。
模拟式采用测速发电机为检测元件,得到的信号是模拟量。
数字式通常采用光电编码器,霍尔元件等为检测元件,得到的信号是脉冲信号。
随着微型计算机的广泛应用,特别是高性能价格比的单片机的出现,转速测量普遍采用以单片机为核心的数字式测量方法。
本文便是运用AT89C51单片机控制的智能化转速测量仪。
电机在运行过程中,需要对其进行监控,转速是一个必不可少的一个参数。
本系统就是对电机转速进行测量,并可以和PC机进行通信,显示电机的转速,并观察电机运行的基本状况。
本设计主要用AT89C51作为控制核心,由霍尔传感器、LED数码显像管、HIN232CPE电平转换、及RS232构成。
详细介绍了单片机的测量转速系统及PC机与单片机之间的串行通讯。
充分发挥了单片机的性能。
本文重点是测量速度并显示在5位LED数码管上。
其优点硬件是电路简单,软件功能完善,测量速度快、精度高、控制系统可靠,性价比较高等特点。
关键字:MSC-51(单片机);转速;传感器目录摘要 (1)Abstract .................................... 错误!未定义书签。
1 序言 (1)2 系统功能分析 (2)2.1 系统功能概述 (2)2.2 系统要求及主要内容 (3)3 系统总体设计 (4)3.1 硬件电路设计思路 (4)3.2 软件设计思路 (4)4 硬件电路设计 (6)4.1 单片机模块 (6)4.1.1 处理执行元件 (6)4.1.2 时钟电路 (10)4.1.3 复位电路 (11)4.1.4 显示电路 (12)4.2 霍尔传感器简介 (15)4.2.1 霍尔器件概述 (15)4.2.2 霍尔传感器的应用 (16)4.2.3 AH41霍尔开关 (17)4.3 发送模块 (18)5 软件设计 (22)5.1 单片机转速程序设计思路及过程 (22)5.1.1 单片机程序设计思路 (22)5.1.2 单片机转速计算程序 (23)5.1.3 二-十进制转换程序 (24)5.2 程序设计 (27)6 系统调试 (29)6.1 硬件调试 (29)6.2 软件调试 (30)6.3 综合调试 (32)6.4 故障分析与解决方案 (33)6.5 结论与经验 (34)参考文献 (36)致谢 (37)附录 (38)附录1 电路原理图 (38)附录2 元器件清单 (39)1 序言智能化转速测量可以对电机的转速进行测量,电机在运行的过程中,需要对其平稳性进行监测,适时对转速的测量有效地可以反映电机的状况。
基于逻辑电路的转速检测系统的设计

基于逻辑电路的转速检测系统的设计随着科技的不断发展,各种电子设备不断出现并得到广泛的应用,特别是在工业自动化领域,电子设备的发展更是迅速。
作为其中的重要组成部分,逻辑电路已经被广泛应用。
基于逻辑电路的转速检测系统是这样一种系统,它通过测量电机转速,对电机进行控制,从而实现自动化生产。
一、转速检测的原理转速检测通常使用霍尔传感器或者光电传感器来进行测量。
两种测量方式各有优缺点,根据具体的应用场景选择不同的传感器,以达到最优的效果。
1. 霍尔传感器原理霍尔传感器是一种基于霍尔效应的传感器。
它可以测量磁场强度并将其转化为电压值。
在转速检测中,霍尔传感器通常被放置在电机的旋转轴上,当旋转的磁铁通过传感器时,会产生一个磁场变化,从而产生一个电压值。
经过适当的放大、滤波和处理,可以得到电机的转速。
2. 光电传感器原理光电传感器是一种基于光电效应的传感器。
它可以将光线的变化转化为电压信号。
在转速检测中,光电传感器通常被放置在电机的传动轴上,当旋转的圆盘或铁齿通过传感器时,会遮挡或透过光线,从而产生一个电压信号。
通过适当的处理,可以得到电机的转速。
二、逻辑电路的设计逻辑电路主要用于对测量的电信号进行处理和控制。
转速检测系统中,逻辑电路的设计要根据具体的应用场景进行选择。
1. 基于单片机的逻辑电路设计单片机是一种常见的逻辑电路,它可以对电信号进行处理和控制。
在转速检测中,单片机可以通过读取传感器的电压信号,并进行适当的处理,得到电机的转速。
控制电机的速度可以通过单片机输出控制信号,调整电机转速。
单片机的优点是设计灵活,可以根据具体的应用场景进行选择,但是需要进行编程。
2. 基于逻辑门的逻辑电路设计逻辑门是逻辑电路的基本组成部分,可以方便地实现布尔运算。
在转速检测中,逻辑门可以通过布尔运算,对测量的电信号进行处理和控制。
例如,可以使用或门将多个传感器的信号进行合并,得到更为准确的转速值。
逻辑门的优点是成本较低,不需要编程,但是不如单片机设计灵活。
基于霍尔传感器的电机转速测量系统设计
3 . 程 序 v o i d c o u n t e r ( v o i d )i n t e r r u p t 0 { c o u n t + +: i f ( c o u n t % 6 = = 0 )/ / 6次循 环 为 电机 转 一 圈 {z s + + : / / 转圈计 数加 1 )
—
』
}
。 I ( d i s p l a y f i ] ) :/ / 1 C D显 示 / / d Ma y m S ( 5 0 O ) ‘
一
v o i d d e l a y l m s ( i n t X )/ / 延时 函数 {
i n t i , J :
/ / 5 0 m s定 时
/ / 5 0 . 2 0 = 1 5
T M O D = O x 0 1 :
T H O = T H M1 :
—
T L O = T L _ M 1 : i n i t _ L C M( ): w h i 1 e ( f b = = 0 )
i f ( 斗 + m s e c : = 2 O ) {f b = l :)
1
( 二 ) 定 时 器 中 断 l _ 工 作 过 程 T T O定时器每 1秒定时中断一次,读 取记 录的脉冲个数 。 2 . 流 程 图 如 图 6所 示 :
嘲硅
( 三 )程序 m a i n 0
{P 2 0 = I :
P 2 0 = 0:
I E = 0 x 8 3 :
{)
E A = 0:
i f ( z s > = l O 0 0 )
P 2 0 = I:
霍尔传感器的电机转速测量系统国外研究现状

霍尔传感器的电机转速测量系统国外研究现状一、引言霍尔传感器是一种常用于测量电机转速的传感器。
它通过检测磁场的变化来确定电机转子的位置和速度。
在国外,已经有许多研究对霍尔传感器的电机转速测量系统进行了深入探索和开发。
本文将对国外研究现状进行综述。
二、霍尔传感器原理霍尔传感器是基于霍尔效应工作的,通过在一个导体中施加电场,当磁场垂直于电流方向时,会产生一个横向的电势差。
这个效应可以用来检测磁场的变化。
在电机转速测量系统中,霍尔传感器通常安装在电机转子上,通过检测旋转过程中磁场变化来确定转子位置和速度。
三、国外研究现状1. 传统型霍尔传感器一些早期的研究主要集中在传统型霍尔传感器上。
这种类型的传感器通常使用单个或多个霍尔元件来检测磁场变化,并通过信号处理电路将其转换为数字或模拟信号。
这些方法可以实现较高精度和稳定性的转速测量,但对于高速转动的电机可能存在一定的限制。
2. 高速霍尔传感器为了解决传统型霍尔传感器在高速转动电机上的局限性,一些研究开始关注高速霍尔传感器的开发。
这种类型的传感器通常采用更先进的技术和材料,以提高其响应速度和测量精度。
一些研究使用了纳米材料来制造高灵敏度和高响应速度的霍尔元件。
这些方法在高速转动电机上取得了较好的效果。
3. 多通道霍尔传感器为了提高转速测量系统的精确度和稳定性,一些研究开始将多个霍尔元件组成多通道霍尔传感器。
这种类型的传感器可以同时检测多个位置,并通过信号处理算法来确定转子位置和速度。
这种方法可以减少误差并提高系统稳定性。
4. 基于微控制器的霍尔传感器系统随着微控制器技术的发展,一些研究开始将霍尔传感器与微控制器相结合,构建基于微控制器的电机转速测量系统。
这种系统可以实现实时数据处理和显示,同时具有较高的精确度和稳定性。
一些研究还将无线通信技术应用于该系统,实现了远程监测和控制。
五、总结通过对国外研究现状的综述,我们可以看到在霍尔传感器的电机转速测量系统领域已经取得了许多进展。
霍尔传感器电机转速测量系统设计
霍尔传感器电机转速测量系统设计09电子1班刘荣 090406130 摘要:本文介绍了霍尔传感器测速的原理,设计了基于单片机AT89C51的直流电机转速测量系统。
完成了电机转速测量系统的硬件电路设计、霍尔传感器测量电路的设计、显示电路的设计。
测量转速的霍尔传感器和机轴同轴连接,机轴每转一周,产生一定量的脉冲个数,由霍尔器件电路部分输出幅度为12V的脉冲。
经光电隔离器后成为输出幅度为5V转数计数器的计数脉冲。
控制定时器计数时间,即可实现对电机转速的测量。
在显示电路设计中,通过1602实现在LCD上直观地显示电机的转速值。
并对电机转速测量系统的硬件电路、显示电路进行了调试。
与软件配合,采用模块化方法进行了软件设计,编制了电机转速的测量设计了测量模块、转速模块、报警模块、显示模块等的C51程序,并通过PROTEUSE软件进行了仿真,实现了显示、报警功能。
仿真实验表明所设计的硬件电路及软件程序是正确的,满足设计要求。
关键词:电机转速测量;霍尔传感器;单片机;89C51;LCD液晶显示Abstract:The principles of motor speed measurements with hall sensor was described in this article and DC motor speed measurement system which is based on AT89C51 was designed, and the corresponding hardware circuit designs was also completed accordingly. The hall sensor is connected with crankshaft by coaxial junction. Every revolution of the crankshaft will generate a certain amount of pulses whose amplitude is 12v. The opto-coupler turns these certain amount of pulses into 5-amplitude count impulse. The motor speed can be measured by controlling the time. In the design of display circuit, the number of motor speed is displayed in LCD directly through 1602. The motor speed measurement system and the hardware circuits, display circuit function are debugged to cooperate with the software to display and alarm users. Combination of hardware circuit design, softwares were designed by a modular approach using C51 program, such as the motor speed measurement module, alarm module, display module etc., All these programs were simulated through PROTEUSE.The simulation results have proved that the hardware circuits design and software program is correct, and the system can meet the designing requirement completely.Key WordS: Motor Speed Measurement; Hall Sensor; Microcomputer; 89C51;LCD正文根据霍尔效应,人们用半导体材料制成的元件叫霍尔元件。
基于单片机的电机转速测量系统的设计
仪 表 技 术 与 传 感 器
I sr me t T c n q e a d S n o n tu n e h iu n e s r
2 1 01
第 8期
No 8 .
基 于单 片机 的 电机 转 速测 量 系统 的设 计
王文成 李 ,
(. 1 潍坊学院信息与控制工程 系, 山东潍坊
霍尔元件作为 一种转 速测量 系统 的传 感器 , 有体 积小 、 它 重量轻 、 安装方便 等优点 , 该传 感器 是利用 霍尔效 应 原理 工作
式 中: 电机 的转 速 ; n为 P为 电机转 一 圈 的脉 冲数 ; T为输 出方 波信号 的周期 。
2 系 统 硬 件 设 计
收稿 日期 :0 0—1 21 2—2 收修改稿 日期 :0 1 3—1 7 2 1 一o 3
率, 根据式 ( ) 1 可计算 出 电机 的转速 。转 速检 测装 置的 软件 系 统主要包括 : 测速 主程序 、 据处 理子程 序 和显示 子程 序 。主 数
2 2 电 源 电路 .
图 5 电 机 测 速 电 路
3 软 件 设 计
系统 采用单片机 中的 I T N 0中断对转速 脉 冲进 行计数 。定
罩
时器 T 工作 于外部 事件 计数方式 , 1 对转速脉 冲计数 ; T O工作 于 定时器方式 。每到 1 读 1 8 次计数 值 , 此值 即为脉 冲信 号的频
式 中 : 为霍尔器件 的灵敏度 系数 ; 为控制 电流 ; , B为磁 感应
强度 。
等 I 。他们各 有优 点和缺点 , 3 直流测速 发 电机 是应用 范 围较 广 的测速元件 , 它的主要优点是 灵敏度 、 高线性误 差小 , 由于 但 它具有 电刷和换 向接触装置 , 因而可靠性 较差 , 应用 范 围有限 ; 普通光 电编码器 虽然精 度较 高 , 体积 大 , 但 成本 高。霍尔 元件 具有尺寸小 、 外围电路 简单 、 使用 寿命 长、 调试 方便等 特点用它
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收稿日期:2009-02-03作者简介:高苇,助理工程师,哈尔滨商业大学,电子信息工程。
电机转速测量系统高 苇(黑龙江省冶金研究所,哈尔滨 150040)摘 要:本文介绍了由单片机89C52构成的电机转速测量系统的工作原理、设计思想、软硬件配置及应用方法。
该系统具有硬件体积小、成本低、检测精度高、操作方便、智能化较高等特点,应用前景十分广阔。
关键词:单片机;喂线机;转速System of Motor Speed MeasurementGao Wei(Heilongjiang Istitute of Metallurgy,Harbin 150040 China)Abstract:This paper introduces the theory and design of motor rotational speed measurement system based on the single chip processor 89c52and the detail implement.The system has the advantage of small cuba ge,low cost,high accuracy,easy to use and so on and can be applied widely.KeyWords:Single chip processor;Wire feeder;Rotational speed 在工业控制领域当中,经常需要测量电机实时转速,在冶金领域炉外精炼用的喂线机要求将精确量的芯线在一定时间内均匀地喂入钢包中,这就要求测量电机(喂线轮)的转速并计算出芯线的长度。
随着微型计算机的广泛应用,特别是高性能单片机的不断推陈出新,转速测量普遍采用了以单片机为核心的数字化、智能化的系统。
本文提出一种基于89C52单片机的测量控制电机转速的方法:利用霍尔传感器采集脉冲信号,通过单片机进行运算处理和分析,将电机的转速实时显示出来,同时实现对芯线长度的计算。
1 测量系统的工作原理本系统实现对喂线机中电机转速的测量,并根据机械比、喂线轮直径换算成芯线长度。
脉冲测速的方法主要有T 法(测周法)、M 法(测频法)。
(1)测周法:T 法是测量两个脉冲之间的时间换算成周期,从而得到频率。
测出产生N 个脉冲内所需要的时间t,则信号的周期为f=N/t,测量频率误差 f N t/t 2,相对误差 f/f= t/t,误差主要来自采样的时间误差,低频脉冲情况下误差较小,测量精度高。
(2)测频法:M 法是测量单位时间内的脉数换算成频率。
在设定t 时间内,测量产生N 个脉冲,则信号的周期为f=N/t,测量频率误差 f N/t,相对误差 f/f= N/N,误差主要来自脉冲个数!1计数误差,高频脉冲情况下误差较小,测量精度高。
本系统采用M 法进行测速,其测量原理如下:测量转速的霍尔传感器固定在距齿轮外缘3mm 的支架上,在霍尔元件正对面的喂线轮上贴一小块磁钢,当测速的喂线轮经过霍尔传感器正前方时,改变了磁通密度,霍尔传感器则产生一系列脉冲信号并经过光电耦合器后转化为计数脉冲送入单片机中,单片机将该数据进行处理后就可以得出喂线轮的转速,并将该数据通过串行通讯接口RS232将数据传输到上位机,显示速度变化。
单片机测量电机转速的系统原理如图1所示。
单片机测量电机转速主要包括三个过程:信33第29卷第2期2009年6月黑龙江冶金Heilongjiang MetallurgyVol.29 No.2June2009号转换、采集过程;信号运算处理、分析过程;速度、长度显示。
图1 单片机测量电机转速的基本原理(1)信号转换、采集过程主要是将喂线机电机的转速信号转换成单片机可以处理的信号。
首先将电机的转速信号通过霍尔传感器转换成对应频率的脉冲信号,并将脉冲信号送入单片机进行采集。
(2)信号运算处理过程主要是把采入单片机系统的经过转换的信号通过软件和算法进行运算处理和分析,得出喂线机的喂线速度和喂线长度。
(3)单片机C PU 将处理后的数据在LC D 上显示出来。
2 单片机部分的硬件设计根据工作原理设计出硬件部分包括三部分:信号检测处理部分、信号通讯部分、信号抗干扰部分。
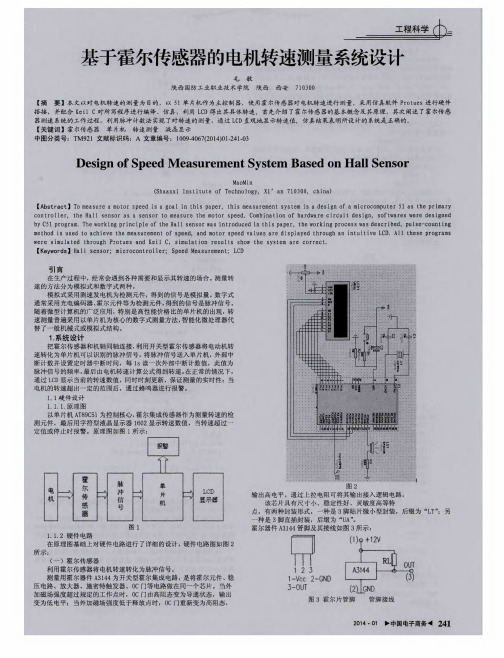
2.1 信号检测处理部分这个部分主要包括两个方面的内容:(1)检测元件:本系统选用的检测元件为DN6837的开关集成霍尔传感器。
集成霍尔元件片内设有稳压电路、施密特电路,通过晶体管的集电极输出信号,并且通过的脉冲信号不需要进行整形。
这种传感器具有时滞特性,此特性可以防止噪声干扰。
此元件是OC 门,需要在输出端与电源之间接一个1.5k 电阻,为了提高其带负载能力,接一个三极管放大电路,电路如图2所示。
图2 检测元件的后续电路(2)处理器:本系统选用ATMEL 公司生产的MCS-51系列AT89C52单片机作为处理器,内置8K 字节电擦除可编程EEPROM 片内程序存储器和256字节RAM,片内程序存储器空间能满足本系统程序存储之需要,可省去片外EPROM 程序存储器和地址锁存器,使电路结构简捷,AT89C52单片机还具有性能价格比高,控制方式可靠,保密性强,功耗低,应用灵活、方便等特点。
2.2 信号通讯部分系统设计为了精确显示反映速度变化,设计一个通过串行通讯接口RS232传输数据信号,选用了MAX232芯片,将信号传输到上位机,通过软件接口显示速度变化,从而准确实现速度在线检测。
2.3 信号抗干扰部分(1)反向隔离:光电隔离电路主要功能是为了防止外部信号与单片机CPU 产生干扰,将外部矩形方波电压信号再经过一个TLP521-1光电隔离器进行隔离,然后再一次经过74LS14施密特反向器整型后进入单片机C PU 系统,且CP U 加隔离后进入驱动系统。
(2)看门狗:为了系统设计可靠性,采用了MAX705复位/看门狗电路,主要功能是防止程序运行时失控和提供外部复位功能。
当系统受到干扰,程序发生∀飞逸#或∀死机#时,看门狗可以使程序复位。
(3)抗干扰稳压电源:主要为控制器其它各部分电路提供可靠的工作电源。
电源电压首先经DC~DC 变压器降压,再经整流、滤波及不同的稳压电路之后,一方面为给定电路提供稳定的设定电压,另一方面也为驱动执行电路提供可靠的工作电源。
外部信号提供的工作电源电压为DC24V,而设计的硬件控制接口工作电压为DC5V,因此需要设计个电源模块由DC24V 转换为DC5V,即DC~DC 转换电源模块。
3 系统的软件设计该系统的软件设计思想采用模块程序设计思想,将该程序分解为若干个功能相对独立的较小的程序模块,这样不仅设计简单而且调试比较方便、直观。
本系统软件可分为主程序、数据处理程序、按键处理程序、中断服务子程序和显示程序五个部分。
其中主程序主要完成初始化功能,包括显示器的初始化、显示缓存的初始化、定时器的初始化、外部中断的初始化以及标志位的初始化。
(下转37页)34黑 龙 江 冶 金第29卷图2 双模控制器系统框图地址设为0x260。
xPC 不提供对光电编码器的支持,所以需要自行开发这些板卡在xPC 下的驱动程序。
这里采用C 代码编写S 函数的方法实现驱动模块。
码盘S 函数中输出函数如下:static void mdlOutputs(SimStruct *S,int-T tid){#ifndef MATLAB-MEX-FILEuint16-T Val,tVal;uint-T baseAddr =B ASE;real-T *y;y=ssGetOutputPortSignal(S,0);tVal =rl32eInpW ((unsigned short )(baseAddr));Val =(tVal&0xfffc)>>2;y[0]=Val;#endif}由于Matlab 环境下m 文件编写的模块无法进行实时仿真,所以各模块都使用Simulink 编制,确实不宜用Simulink 编制的,可以使用C 代码编写S函数的方法实现。
搭建好MATLAB/Simulink 下的模型后,就可以通过RTW 生成c 代码,下载到目标机中,对转台的位置进行实时控制了。
xPC 提供了多种操作实时仿真的方法,可以在宿主机上用MATLAB 的命令行,或者通过宿主机上xPC 的远程控制工具控制实时仿真。
3 结 语本文实现了转台控制系统的实时仿真,在Matlab/Simulink/RTW/xPC 环境下实现了整个系统的软件。
在纯数学仿真阶段编制算法的Simulink 模型可直接用于实时仿真,便于快速原型化。
参考文献[1]杨 涤,李立涛,杨 旭,等.系统实时仿真开发环境与应用[M].清华大学出版社.2002(3):189-207.[2]The Math works inc.xPC Target User ∃s Guide [EB/OL ].[2006-12-06].http://www.math /access/helpdesk/help/pdf-doc/xpc/xpc-target-ug.pd f.[3]刘小莉,韩加蓬.MATLAB/xPC 环境下数据采集系统的设计[J].山东理工大学学报(自然科学版).2007,21(4):28-30.[4]翟 坤,杨 涤,刘振刚,曲 溪.采用xPC 实现转台的位置伺服系统[J].系统工程与电子技术.2005,27(4):737-739.(上接34页)图3 主程序流程图4 结 语此系统提出了以AT89C52单片机为核心控制,通过对硬件软件的设计,完成了对喂线机中电机转速的在线检测控制系统,利用了单片机优越的编程、控制性能,充分发挥单片机的核心地位,集机电一体化技术、智能仪器仪表技术于一体,以达到使系统高度集成化,且系统硬件结构简单合理,具有十分广阔的应用前景。
参考文献[1]何立民.MCS-51系列单片机应用系统设计系统配置与接口技术[M ].北京航天航空大学出版社,1990.[2]谭浩强.C 语言程序设计[M].清华大学出版社,1991.[3]陈伯时.电力拖动自动控制系统[M].机械工业出版社,1992.37第2期于月芬:基于xPC 的转台控制实时仿真系统设计。