ANSYS耦合与约束方程
ANSYS求解过程中的载荷、约束与边界条件的设定
1.施加显式分析的载荷一般的加载步骤如下:(1)将模型中受载的部分定义为组元或PART(用于刚体的加载);(2)定义包含时间和对应荷载数值的数组参数并赋值;(3)通过上述数组定义荷载时间历程曲线;(4)选择施加荷载的坐标系统(默认为在总体直角坐标系);(5)将荷载施加到结构模型特定受载的部分上。
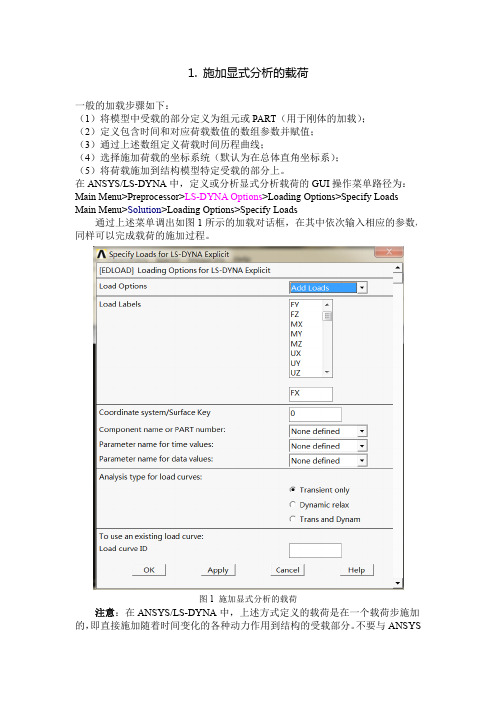
在ANSYS/LS-DYNA中,定义或分析显式分析载荷的GUI操作菜单路径为:Main Menu>Preprocessor>LS-DYNA Options>Loading Options>Specify Loads Main Menu>Solution>Loading Options>Specify Loads通过上述菜单调出如图1所示的加载对话框,在其中依次输入相应的参数,同样可以完成载荷的施加过程。
图1施加显式分析的载荷注意:在ANSYS/LS-DYNA中,上述方式定义的载荷是在一个载荷步施加的,即直接施加随着时间变化的各种动力作用到结构的受载部分。
不要与ANSYS隐式结构分析中多个载荷步加载的概念相混淆。
施加了显式分析载荷之后,可以通过操作显示或隐藏载荷标志,其GUI菜单操作路径为:Main Menu>Preprocessor>LS-DYNA Options>Loading Options>Show Forces2.施加初始条件在瞬态动力问题中,经常需要定义结构系统的初始状态,如初始速度等。
在ANSYS/LS-DYNA程序中,菜单路径为:Main Menu>Preprocessor>LS-DYNA Options>Initial Velocity>OnNodes/PARTsMain Menu>Solution>Initial Velocity>On Nodes/PARTs图2施加于PART上初始速度3.施加边界条件在ANSYS/LS-DYNA中,可以定义如下一些类型的边界条件:★固定边界条件其菜单操作路径为:Main Menu>Preprocessor>LS-DYNA Options>Constraints>Apply>On Nodes Main Menu>Solution>Constraints>Apply>On Nodes在图形窗口中单击需要约束的节点,然后,在弹出的如图3所示的对话框中进行施加零约束的操作。
ANSYS各类型单元连接专题讲解(一)之连接总则

ANSYS各类型单元连接专题讲解(一)之连接总则一直以来,有不少同学咨询水哥关于ANSYS中杆单元、梁单元、壳单元、实体单元的连接问题。
之所以要用到各单元的连接,主要是由于我们在实际项目中,常常需要各种单元组合模拟,例如框架结构计算中的框架柱、框架梁采用梁单元模拟,楼板采用壳单元模拟,如此便会产生各类型单元之间的连接问题。
为解决部分朋友们的疑问,水哥依自己的理解将从以下几个方面系统讲解下ANSYS中杆单元、梁单元、壳单元、实体单元的连接,其中若有不合理之处,还望各位朋友批评指正。
本系列讲解目录如下:1、单元连接总原则。
2、杆与梁、壳、体单元的连接。
3、梁单元与实体单元铰接。
4、2D梁单元与2D实体单元刚接。
5、3D梁单元与3D实体单元刚接。
6、壳单元与实体单元连接。
7、单元连接综合实例。
本篇推文为该系列文章的首篇,主要说下ANSYS中单元连接总的原则以及简单介绍两个概念。
一般来说,按“杆梁壳体”单元顺序,只要后一种单元的自由度完全包含前一种单元的自由度,则只要有公共节点即可,不需要约束方程,否则需要耦合自由度与约束方程。
例如:(1)杆与梁、壳、体单元有公共节点即可,不需要约束方程。
(2)梁与壳有公共节点即可,也不需要约束写约束方程;壳梁自由度数目相同,自由度也相同,尽管壳的rotz是虚的自由度,也不妨碍二者之间的关系,这有点类同于梁与杆的关系。
(3)梁与体则要在相同位置建立不同的节点,然后在节点处耦合自由度与施加约束方程。
(4)壳与体则也要相同位置建立不同的节点,然后在节点处耦合自由度与施加约束方程。
从上述也可见,ANSYS无非是通过三种方法来实现单元之间的连接:共用节点、耦合、约束方程。
这里简单介绍下耦合与约束方程的基本概念。
一、耦合所谓耦合,其实是一种比较特殊的约束方程,只不过为了区别于普通一般的约束方程,方便用户操作,特定提出来的一个概念。
他具体指当我们需要迫使两个或多个自由度取得相同值(值未知)时,可以将这类自由耦合在一起。
总结一下ANSYS中不同单元之间的连接问题

论坛里常有人问不同单元之间的连接问题,我自己也一直被这个问题所困绕,最近从ANSYS工程分析进阶实例上知道了ANSYS中不同单元之间的连接原则。
感觉收收获不小,现把它上传与大家共享。
一般来说,按“杆梁壳体”单元顺序,只要后一种单元的自由度完全包含前一种单元的自由度,则只要有公共节点即可,不需要约束方程,否则需要耦合自由度与约事方程。
例如:(1)杆与梁、壳、体单元有公共节点即可,不需要约束方程。
ﻫ(2)梁与壳有公共节点怒可,也不需要约束写约束方程;壳梁自由度数目相同,自由度也相同,尽管壳的rotz是虚的自由度,也不妨碍二者之间的关系,这有点类同于梁与杆的关系。
(3)梁与体则要在相同位置建立不同的节点,然后在节点处耦合自由度与施加约束方程。
(4)壳与体则也要相同位置建立不同的节点,然后在节点处耦合自由度与施加约束方程。
上面所述的不同单元之间的接连方法主要是用耦合自由度和约束方程来实现的,有一定的局限性,只适用于小位移,下面介绍一种支持大位移算法的方法,MPC法。
MPC即Multipoint Constraint,多点约束方程,其原理与前面所说的方程的技术几乎一致,将不连续、自由度不协调的单元网格连接起来,不需要连接边界上的节点完全一一对应。
MPC能够连接的模型一般有以下几种。
ﻫsolid 模型-solid模型ﻫshell模型-shell模型solid模型-shell 模型solid 模型-beam模型shell模型-beam模型ﻫ在ANSYS中,实现上述MPC技术有三种途径。
ﻫ(1)通过MPC184单元定义模型的刚性或者二力杆连接关系。
定义MPC184单元模型与定义杆的操作完全一致,而MPC单(2)利用约束元的作用可以是刚性杆(三个自由度的连接关系)或者刚性梁(六个自由度的连接关系)。
ﻫ方程菜单路径Main Menu>preprocessor>Coupling/Ceqn>shell/solid Interface创建壳与实体模型之间的装配关系。
ansys命令流中文说明
ansys命令流中文说明展开全文KB、KE: 待划分线的定向关键点起始、终止号SECNUM: 截面类型号u SECPLOT,SECID,MESHKEY 画梁截面的几何形状及网格划分SECID:由SECTYPE命令分配的截面编号MESHKEY:0:不显示网格划分1:显示网格划分u /ESHAPE, SCALE 按看似固体化分的形式显示线、面单元SCALE: 0:简单显示线、面单元1:使用实常数显示单元形状u esurf, xnode, tlab, shape 在已存在的选中单元的自由表面覆盖产生单元xnode: 仅为产生surf151 或surf152单元时使用tlab: 仅用来生成接触元或目标元top 产生单元且法线方向与所覆盖的单元相同,仅对梁或壳有效,对实体单元无效Bottom产生单元且法线方向与所覆盖的单元相反,仅对梁或壳有效,对实体单元无效Reverse 将已产生单元反向Shape: 空与所覆盖单元形状相同Tri 产生三角形表面的目标元注意:选中的单元是由所选节点决定的,而不是选单元,如同将压力加在节点上而不是单元上u Nummrg,label,toler, Gtoler,action,switch 合并相同位置的itemlabel: 要合并的项目node: 节点, Elem,单元,kp: 关键点(也合并线,面及点)mat: 材料,type: 单元类型,Real: 实常数cp:耦合项,CE:约束项,CE: 约束方程,All:所有项toler: 公差Gtoler:实体公差Action: sele 仅选择不合并空合并switch: 较低号还是较高号被保留(low, high)注意:可以先选择一部分项目,再执行合并。
如果多次发生合并命令,一定要先合并节点,再合并关键点。
合并节点后,实体荷载不能转化到单元,此时可合并关键点解决问题。
u Lsel, type, item, comp, vmin, vmax, vinc, kswp 选择线type: s 从全部线中选一组线r 从当前选中线中选一组线a 再选一部线附加给当前选中组aunoneu(unselect)inve: 反向选择item: line 线号loc 坐标length 线长comp: x,y,zkswp: 0 只选线1 选择线及相关关键点、节点和单元u Nsel, type, item, comp, vmin, vmax, vinc, kabs 选择一组节点为下一步做准备Type: S: 选择一组新节点(缺省)R: 在当前组中再选择A: 再选一组附加于当前组U: 在当前组中不选一部分All: 恢复为选中所有None: 全不选Inve: 反向选择Stat: 显示当前选择状态Item: loc: 坐标node: 节点号Comp: 分量Vmin,vmax,vinc: ITEM范围Kabs: “0” 使用正负号“1”仅用绝对值u NSLL,type, nkey 选择与所选线相联系的节点u nsla, type, nkey: 选择与选中面相关的节点type:s 选一套新节点r 从已选节点中再选a 附加一部分节点到已选节点u 从已选节点中去除一部分nkey: 0 仅选面内的节点1 选所有和面相联系的节点(如面内线,关键点处的节点)u esel, type, item, comp, vmin, vmax, vinc, kabs 选择一组单元Type: S: 选择一组单元(缺省)R: 在当前组中再选一部分作为一组A: 为当前组附加单元U: 在当前组中不选一部分单元All: 选所有单元None: 全不选Inve: 反向选择当前组(?)Stat: 显示当前选择状态Item: Elem: 单元号Type: 单元类型号Mat: 材料号Real: 实常数号Esys: 单元坐标系号u ALLSEL, LABT, ENTITY 选中所有项目LABT: ALL: 选所有项目及其低级项目BELOW: 选指定项目的直接下属及更低级项目ENTITY: ALL: 所有项目(缺省)VOLU:体高级AREA:面LINE :线KP:关键点ELEM:单元NODE:节点低级u Tshap,shape 定义接触目标面为2D、3D的简单图形Shape: line:直线Arc:顺时针弧Tria:3点三角形Quad:4点四边形………….2.6 根据需要耦合某些节点自由度u cp, nset, lab,,node1,node2,……node17nset: 耦合组编号lab: ux,uy,uz,rotx,roty,rotznode1-node17: 待耦合的节点号。
ansys载荷和约束
ansys载荷和约束3工作台约束的含义是1)在顶点的固定约束:–。
边或面约束所有自由度-实体为,壳和梁为x、y和z平移–,y和z2)的平移和旋转,给定位置偏移:–给定已知位移Y和z方向给出强制位移-输入“0”表示在这个方向上受到约束199–没有在某个方向上设置值,这意味着实体在这个方向上自由移动3 259 因为对称平面相当于法向约束4)圆柱约束:–应用于圆柱曲面–用户可以指定轴向。
径向或切向约束–仅适用于小变形(线性)分析5)仅压缩约束:–只能对任何给定曲面施加法向压缩约束该约束仅限制曲面沿约束的法线正向移动-解释此约束的一种方法是将其想象为与选定曲面形状相同的“刚性”结构。
请注意,这些接触(压缩)表面事先并不知道-可以在圆柱面上模拟”紧固圆柱约束”。
此约束可应用于7.1版,但它是“仅压缩约“的特殊情况如右图所示,显示了没有变形的圆柱体的轮廓。
具有压缩力的表面防止原始圆柱体变形,具有和可拉伸性的表面可自由变形。
–这需要迭代(非线性)求解器来解决?因为事先不知道压缩表面的行为,因此,有必要使用迭代求解器来确定哪个曲面显示压缩行为6)简单约束:–可以应用于梁的边缘或顶点,或者shell-限制平移,但所有旋转都是自由的7 259 但平移不限制约束摘要:4约束和接触对可归因于边界条件–触点对模拟两个已知模型之间的“柔性”边界条件–固定约束,以提供“刚性”边界条件、刚性固定零件do型支架零件表面的等效接触条件固定支架粘合触点带有刚性、不可移动零件的无摩擦支架无分离触点带有刚性、不可移动零件的仅压缩支架与刚性、不可移动零件的无摩擦接触如果对a部分和B部分之间的连接感兴趣,那么有必要考虑是否需要(通过接触)分析这两个部分,或者是否只对b部分对A的影响提供固定约束就足够了–换句话说,部分B是否相对于A?刚性??如果是这样,只能模拟组件A上的一个固定约束如果不是,则需要模拟它们之间的摩擦。
8)热负荷:在型号中,温度会引起热膨胀–热应变计算如下:α为热膨胀系数(CTE),T ref为热应变为零时的参考温度,T为–热应变本身不会引起应力然而,只有当约束、温度梯度或热膨胀系数不匹配时,才会产生应力。
ansys约束方程mises
ansys约束方程mises摘要:1.什么是ANSYS 约束方程2.ANSYS 约束方程的作用3.ANSYS 约束方程的类型4.如何使用ANSYS 约束方程5.ANSYS 约束方程的注意事项正文:一、什么是ANSYS 约束方程ANSYS 约束方程是在ANSYS 中对模型进行有限元分析时,为了限制模型的某些自由度或约束模型的某些条件而设置的方程。
它可以用来模拟实际工程中的各种约束情况,例如固定支撑、转动约束、对称约束等。
二、ANSYS 约束方程的作用约束方程在ANSYS 中的作用主要体现在以下几个方面:1.提高计算精度:通过设置约束方程,可以减少模型的自由度,使得计算过程更加稳定,提高计算精度。
2.降低计算成本:在某些情况下,通过设置约束方程,可以减少需要计算的元素数量,从而降低计算成本。
3.模拟实际工程:在实际工程中,很多结构都存在一定的约束条件,通过设置约束方程,可以更好地模拟实际工程情况。
三、ANSYS 约束方程的类型ANSYS 约束方程主要包括以下几种类型:1.固定约束:用于限制模型某个节点的位移。
2.转动约束:用于限制模型某个节点的旋转角度。
3.对称约束:用于限制模型某个面的对称性。
4.接触约束:用于模拟模型与外部物体的接触情况。
5.温度约束:用于限制模型的温度。
四、如何使用ANSYS 约束方程在使用ANSYS 约束方程时,需要按照以下步骤进行操作:1.创建模型:首先需要创建有限元模型,并对模型进行网格划分。
2.设置约束方程:在ANSYS 中,可以通过“约束”菜单中的“定义”选项来设置约束方程。
在设置约束方程时,需要指定约束类型、约束参数以及约束方程的节点。
3.施加边界条件:在设置约束方程后,还需要对模型施加边界条件,以便进行求解。
4.求解模型:设置好约束方程和边界条件后,可以使用ANSYS 中的“求解”菜单进行求解。
5.后处理:求解完成后,可以使用ANSYS 中的“后处理”菜单对结果进行分析和可视化。
ANSYS耦合场分析指南
第一章耦合场分析1.1耦合场分析的定义耦合场分析是指考虑了两个或多个工程物理场之间相互作用的分析。
例如压电分析,考虑结构和电场间的相互作用:求解由施加位移造成的电压分布或相反过程。
其它耦合场分析的例子有热-应力分析,热-电分析,流体-结构分析。
需要进行耦合场分析的工程应用有压力容器(热-应力分析),流体流动的压缩(流体结构分析),感应加热(磁-热分析),超声波换能器(压电分析)以及磁体成形(磁-结构分析),以及微电机械系统(MEMS)等。
1.2耦合场分析的类型耦合场分析的过程依赖于所耦合的物理场,但明显可以可分为两类:顺序耦合和直接耦合。
1.2.1 顺序耦合方法顺序耦合方法包括两个或多个按一定顺序排列的分析,每一种属于不同物理场的分析。
通过将前一个分析的结果作为载荷施加到第二个分析中的方式进行耦合。
典型的例子是热-应力顺序耦合分析,热分析中得到节点温度作为“体载荷”施加到随后的应力分析中去。
1.2.2 直接耦合方法直接耦合方法一般只涉及到一次分析,利用包括所有必要自由度的耦合场类型单元。
通过计算包含所需物理量的单元矩阵或载荷向量的方式进行耦合。
例如使用了SOLID5、PLANE13或SOLID98单元的压电分析。
另外的例子如利用TRANS126单元的MEMS分析。
1.2.3 直接法与顺序法的应用场合对于耦合情况的相互作用非线性程度不是很高的情况,顺序耦合法更有效,也更灵活。
因为两个分析之间是相对独立的。
例如在热应力顺序耦合分析中,可以先进行非线性瞬态热分析,然后再进行线性静力分析。
可以将瞬态热分析中任一载荷步或时间点的节点温度作为载荷施加到应力分析中。
顺序耦合可以是不同物理场之间交替进行执行,直到收敛到一定精度为止。
当耦合场之间的相互作用是高度非线性的,直接耦合具有优势。
它使用耦合变量一次求解得到结果。
直接耦合的例子有压电分析,流体流动的共轭传热分析,电路-电磁分析。
这些分析中使用了特殊的耦合单元直接求解耦合场间的相互作用。
Ansys耦合热分析教程解读

物理环境 (续)
同时,确认网格划分的密度在所有物理环境中都能得到可以接收的 结果。如:
这种划分方法在热分析中可以得到 满意的温度分布,但. . .
. . . 这样的网格密度在结构分析中
才能得到准确的结果。
物理环境方法允许载一个模型中定义最多9种物理环境。这种方法 当考虑多于两个场的相互作用时或不能在每个环境中使用不同的数 据库文件的情况下比较适用。要得到关于间接问题的物理环境方法, 可以参考《耦合场分析指南》的第二章。
间接方法
间接方法 用于求解间接耦合场问题。它需要连续进行两个单场的
分析(而不是同时),第一种分析的结果作为第二种分析的载荷。如:
热
结构
热
结构
许多问题需要热到结构 的耦合(温度引 起的热膨胀) 但反之不可 结构到热 耦合是可以忽略的(小的应变 将不对初始的热分析结果产生影响)
在实用问题中,这种方法比直接耦合要方便一些,因为分析使用的 是单场单元,不用进行多次迭代计算。
1.建立,加载,求解 热模型
5b.写节点文件 (NWRITE) 并存储结 构文件
5c.读入热模型并进行 温度插值 (BFINT)
结束 5d. 读入结构模型并读 入体载荷文件 (/INPUT)
9. 后处理
4.定义结构材料特性
6. 指定分析类型,分 析选项和载荷步选项
7. 指定参考温度并施 加其它结构载荷
流程细节 (续)
5B. 从热分析中施加温度体载荷(LDREAD 命令):
5B 确定结果的 时间和子步 确定温度结 果文件 9. 求解当前载荷步
8. 存储并求解
流程细节
下面是热-应力分析的每步细节。
1. 2.
建立热模型并进行瞬态或稳态热分析,得到节点 上的温度。 查看热结果并确定大温度梯度的时间点 (或载荷步 /子步)。