完整版Photoscan教程
第八讲PHOTOSCAN软件操作培训

四、密集点云重建
这一步要对三维点云进行三角化处理。执行工作流程——网格重建。在菜单下有 三个选项需要选择, 表面类型(Surfacetype),选择任意(Arbitary),另一个 选项高度厂(Heightfield)针对的是航空图像。点云来源(Source data),这 里当然要选择密集点云(Dense cloud), 如果选择稀疏点云(Sparse cloud), 结果会比较差。多边形数量(Polygon count),根据需要选择,同样,数量越 多处理时间越长,默认给出了几种精度下的对应数量,也可以根据需要手动设置, 一般情况下,高(High)足矣。
三、稀疏点云重建
稀疏点云重建之后,我们可以大体上看到重建场景的样貌,其中红色部 分代表的是相机空间矩阵,主要是方便检查校验相机信息,被红色部分包围 的就是重建目标,可以看出,房屋的主体轮廓和纹理信息已经基本成型红色 部分之外的点云是一同被恢复出的场景信息,虽然是我们不需要的东西,而 且在拍摄图像是并没有特意兼顾,但是可以发现其三维重建点云依然可以接 受可见算法的强大!通过点云编辑工具将不需要的部分删除,下一步就要开 始密集点云重建了。
六、生成三维模型
处理完后生成的三维模型如下图
七、导出三维模型
在导出模型时选择.obi格式,利用Smart3D浏览器打开。
Photoscan软件操作步骤
1、打开photoscan软件,然后点击“菜单栏”--“工作流程”--“添加照片”
2、“菜单栏”--“工作流程”--“对齐照片” 此处“成对预选”选择“已禁用” 精度:越高越好,处理时间越长
3、“菜单栏”--“工作流程”--“建立密集点云”
4、利用选择按钮,通过“平移”、“旋转”,设置工作区
5、“菜单栏”--“工作流程”--“生成网格” 表面类型:任意 源数据:密集点云
PhotoScan初学者1.0.0版
PhotoScan初学者1.0.0版
教程(初级级):
基于Agisoft PhotoScan1.0.0版三维模型重建
PhotoScan 准备
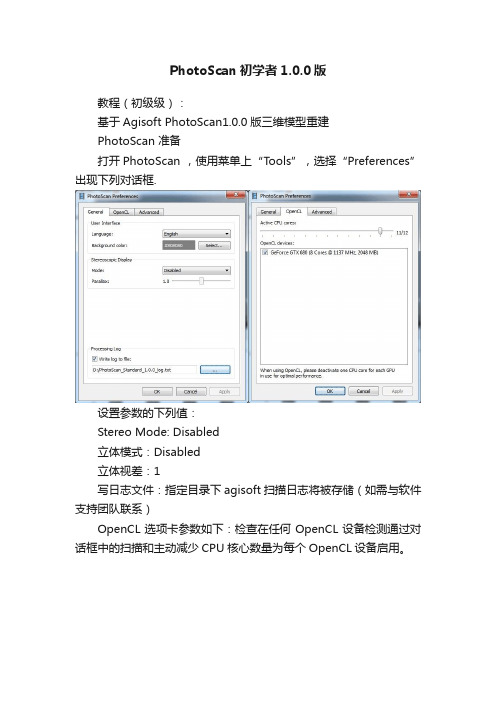
打开PhotoScan ,使用菜单上“Tools”,选择“Preferences”出现下列对话框.
设置参数的下列值:
Stereo Mode: Disabled
立体模式:Disabled
立体视差:1
写日志文件:指定目录下agisoft扫描日志将被存储(如需与软件支持团队联系)
OpenCL选项卡参数如下:检查在任何OpenCL设备检测通过对话框中的扫描和主动减少CPU核心数量为每个OpenCL设备启用。
设置高级选项卡中的参数的下列值:项目压缩级别: 6
保持深度图/存储图像的路径:disabled
绝对禁用程序启动时检查更新:Enabled
启用启用VBO支持:Disabled
Photoscan集群建模详细教程
Photoscan集群建模详细教程目录1添加照片 (2)2导入POS (2)3导入控制点 (4)4刺控制点 (4)5集群设置 (6)5.1设置共享目录 (6)5.2网络设置 (7)5.3服务器设置 (8)5.4处理节点设置 (8)6提交集群处理任务 (9)7数据导出 (11)7.1空三成果导入contextcapture进行三维重建 (11)7.2导出三维模型 (13)1添加照片单击菜单栏,工作流程→添加照片或添加文件夹,进行照片导入。
2导入POS点击参考界面,导入Pos文件格式(照片号需要带后缀名)选择对应的坐标系,列属性对应好。
Items选择相机。
3导入控制点导入控制点方法跟导pos方法一样,只是Items选择标记。
4刺控制点选择要刺点的照片,双击打开,右键place marker选择控制点点号。
精确刺点鼠标放到小旗下方,白点变红(左图),按住鼠标左键不放(如右图),进行控制点调整。
根据控制点点之记文件,将控制点精准的刺到影像上。
其他影像上以此方法进行刺点,将所有控制点刺到相片上。
5集群设置5.1设置共享目录5.2网络设置设置主机的ip地址,数据的共享目录,保存工程,必须在共享目录内,格式为psx。
5.3服务器设置运行CMDCD C:\Program Files\Agisoft\PhotoScan Prophotoscan--server--control192.168.1.143--dispatch192.168.1.143--root R:\PHOTOSCAN\可以将以上两行代码,写到txt文件里,然后后缀名改成.bat,双击运行5.4处理节点设置CD C:\Program Files\Agisoft\PhotoScan Prophotoscan--node--dispatch192.168.1.143--root\\192.168.1.143\r\PHOTOSCAN可以将以上两行代码,写到txt文件里,然后后缀名改成.bat,双击运行6提交集群处理任务工作流程→批量处理生成三维模型,只需要到生成纹理这一步,需要生产DEM、DOM产品可以选择接着往下进行。
Photoscan使用说明书
AgriHawk无人机数据处理软件使用说明一、双击软件安装文件,一直点击下一步,直至软件安装完成。
软件安装后,双击桌面,打开软件,软件打开后界面如下图所示:二、点击菜单栏“工作流程”,下拉菜单中有“添加照片”、“添加文件夹”选项,分别以选择照片和选择整个文件夹影像方式加入影像,如下图所示:三、点击“添加照片”,出现如下图界面,可选择需要处理的影像:四、选择影像后,在左侧会出现影像名列表,软件下侧会显示影像缩略图:五、双击每个缩略图,主窗口显示该张影像的大图,可以查看影像:六、如果有POS数据,点击左侧窗口“参考”栏中第一个图表,导入POS数据,若没有POS 数据可直接跳至步骤十一(POS数据为拍摄每张影像所对应的无人机位置、姿态参数,辅助拼接,拼接后的影像将具有地理坐标信息):七、点击“导入”后,弹出POS导入窗口,如下图,选择整理好的POS文档即可:八、POS导入后,选择“WGS84”坐标系统,并将各列数据与表头名称对应:九、对应好的POS界面如下图所示:十、POS数据导入后,界面中将显示POS轨迹,即无人机拍摄照片时所处空间位置:十一、点击“工作流程-对齐照片”:十二、在弹出的对话框中,精度选择“高”,成对预选选择“参考”,点击确定:十三、下图自动开始“对齐照片”处理,界面如下图,此过程只需等待,无需操作:十四、处理完成后,会生成三维点云数据,如下图所示:十五、“对齐照片”完成后,点击“工作流程-建立密集点云”:十六、在弹出的对话框中,选择所需要的质量,如下图,质量设置越高,处理速度越慢:十七,点击确定后,系统自动处理,并显示处理进度:十八、处理完成后,生成密集点云数据:十九、选择“工作流程-生成网格”,如下图:二十、在弹出的对话框中选择所需要的质量,点击确定,出现以下进度显示界面:二十一、处理完成后,生成测区光滑曲面:二十二、点击“文件-导出正射影像-导出JPEG/TIFF/PNG”,导出拼接后影像:二十三、在弹出的界面中,直接默认设置即可,点击“导出”:二十四、点击“导出”后,选择导出路径及导出文件名:二十五、点击确定后,开始导出,等待完成后,即可到相应路径下,查看拼接后正射影像。
(完整版)Photoscan教程
Agisoft PhotoScan Professional 生成三维模型步骤
1、在工作区区域右击选择“添加堆块".
2、在堆块区域中右击选择“添加图片"。
3、在堆块区域中右击选择“对齐图片”。
注意:成对预选必须选择已禁用
4、在堆块区域中右击选择“优化对齐方式”(可以不操作)。
建议:“拟合k4”打钩
5、在堆块区域中右击选择“生成密集点云"。
注意:在生成密集点云前,必须调整区域大小大于物体摸。
点击“调整区域大小",可以进行区域调整,质量要求越高处理时间越长。
6、在堆块区域中右击选择“生成网络”。
注意:表面类型选任意,源数据选密集点云7、在堆块区域中右击选择“生成纹理"。
8、在文件菜单栏选择“导出模型”。
注意:模型输出格式为obj。
Photoscan工作流程
利用Photoscan空三前期处理流程本文旨在针对pos精度不高,采用Google Earth刺入控制点方式增加精度。
而且,pos不参与生成相机文件所需工具:1.笑脸coord软件2. PhotoscanV1.263. OriPtb Matrix4. Google Earth Pro原始数据:1. 影像(jpg或者tif)2. pos文件(pos文件可以是经纬度带粗略角元素的文件,也可是差分后的GPS 文件)。
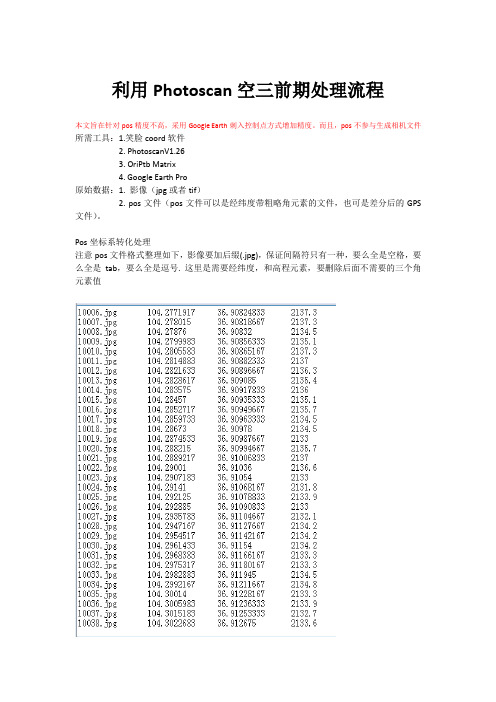
Pos坐标系转化处理注意pos文件格式整理如下,影像要加后缀(.jpg),保证间隔符只有一种,要么全是空格,要么全是tab,要么全是逗号. 这里是需要经纬度,和高程元素,要删除后面不需要的三个角元素值这里我们需要将pos 大地坐标转化为平面坐标具体操作如下1.打开笑脸coord软件,设置-地图投影-2. 在投影设置里,选择高斯六度带,中央子午线设置105,其他保持不变3.点击文件转化,选择文件格式:点号经度纬度如果没有,点自定义格式设置,然后设置依次设置名称,扩展名,分隔符号,数据列表如下完成点击新建4.导入需要转换的pos文件,进行转化修改得到文件扩展名为.txt进行下一步正式处理处理流程:1. 打开photoscan,工作流-添加照片2. 在参考(reference)窗口选择导入,导入pos文件3. 选择好间隔符后,检查下X和Y值没有搞混,X为6位或8位,Y是7位,点确定4. 在主窗口界面可以浏览pos点概况5. 工作流-对齐照片,精度推荐用Low(速度快,普通和高匹配速度太慢),如果导入过pos 文件,下面可以选择参考(reference)模式,高级设置里的关键点限制和连接点限制最多不要超过默认值的2倍,也就是80000和2000。
6.检查对齐照片精度,精度小于5m说明Pos精度比较好,可以用于产生相机文件,这里由于精度不高,错误值比较大,此时采取不导入pos,产生相机文件7.当第6步中的错误有超过5的(accurac为默认的10.0情况下),则不能依据POS文件来输出自检校的相机文件。
PHOTOSCAN软件操作培训

四、密集点云重建
这一步要对三维点云进行三角化处理。执行工作流程——网格重建。在菜单下有 三个选项需要选择, 表面类型(Surfacetype),选择任意(Arbitary),另一个 选项高度厂(Heightfield)针对的是航空图像。点云来源(Source data),这 里当然要选择密集点云(Dense cloud), 如果选择稀疏点云(Sparse cloud), 结果会比较差。多边形数量(Polygon count),根据需要选择,同样,数量越 多处理时间越长,默认给出了几种精度下的对应数量,也可以根据需要手动设置, 一般情况下,高(High)足矣。
Photoscห้องสมุดไป่ตู้n软件操作
三维模型重建
一、导入图片到Photoscan
这一步需要注意,对于存在有明显拍摄缺陷的图像(如虚焦、曝光过 度),要事先剔除掉。
二、对齐图片
这一步主要进行相机的标定以及稀疏重建。由于Photoscan对使用者封装了 其中的计算过程,只留了三个参数供选择。实际使用中一般只需要设置决定 计算的精确性,有高中低三个选项,精度越高计算速度越慢只要计算机硬件 性能足够,一般选择高(High);第二项成对预选(Pair preselection)一 定要选择禁止(Disabled)。图4-2:选好选项后,点击ok,计算机就开始进 行分析和重建了,一般从几分钟到几十分钟不等。
3、“菜单栏”--“工作流程”--“建立密集点云”
4、利用选择按钮,通过“平移”、“旋转”,设置工作区
5、“菜单栏”--“工作流程”--“生成网格” 表面类型:任意 源数据:密集点云
6、“菜单栏”--“工作流程”--“生成纹理”
七、此时已经生成了三维模型。通过菜单栏--“文件”--“导出模型”。
photoscan使用步骤
学习PhotoScan使用报告
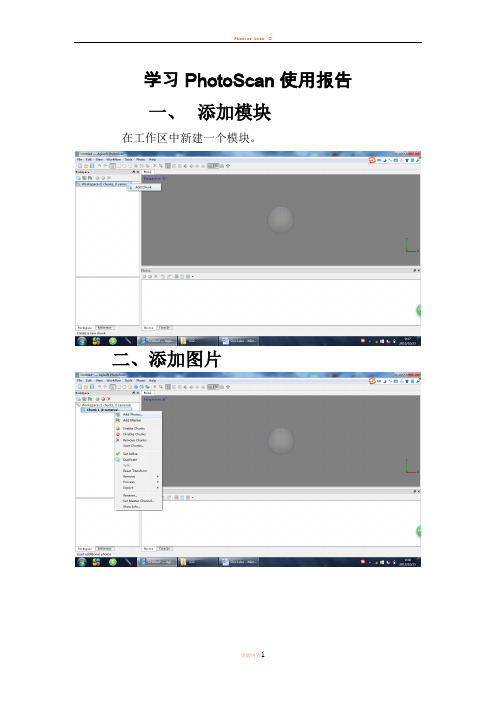
一、添加模块
在工作区中新建一个模块。
二、添加图片
三、对齐图片
注意:成对预选必须选择已禁用。
四、优化对齐方式
注意:拟合4K选项打钩。
五、生成密集点云
注意:在生成密集点云前,必须调整区域大小大于物体摸型。
点击“调整区域大小”,可以进行区域调整。
调整好区域后,依据电脑配置选择中等数量的点云。
六、生成网络
注意:表面类型选任意,源数据选密集点云
内存不够,于是在安全模式下进行网络生成。
七、生成纹理
由于并未拍摄石碑俯视照片,所以生成的石碑模型顶部有远处的树木遮挡。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Agisoft PhotoScan Professional 生成三维模型步骤1在工作区区域右击选择“添加堆块”。
2、在堆块区域中右击选择“添加图片”
兀卄Wn - ■»«- kR **r -
3、在堆块区域中右击选择“对齐图
片”
注意:成对预选必须选择已禁用
4、在堆块区域中右击选择“优化对齐方式”(可以不操作)
r «PE・
> -Ml**
■r — * 7
■ *■
注意:在生成密集点云前,必须调整区域大小大于物体摸。
点击“调整区域大小” ,可以进
行区域调整,质量要求越高处理时间越长。
6、在堆块区域中右击选择“生成网络” 。
建议: “拟合 k4 ”打钩 WL ZJ2 二 4b- Wib 二 -UM M0 VW _2 > 11 W CE1
> • v A Ml ■・ u JI I h ■ T ■ Kt 尸■
5、在堆块区域中右击选择“生成密集点
云”
療一殿 质里: 咼 L
注意:表面类型选任意,源数据选密集点云7、在堆块区域中右击选择“生成纹理”
R ・ it ■ v 4 K
I' •:U・i・.
—,眉;一“
> IMh>
* Afln
'送■■hM
MM”
■M B
l»
■■
=;-
A L
8、在文件菜单栏选择“导出模型”
聖I* - £MQ *•
注意:模型输出格式为obj。