《计算机仿真技术》试题(含完整答案)
2009年计算机仿真技术试卷
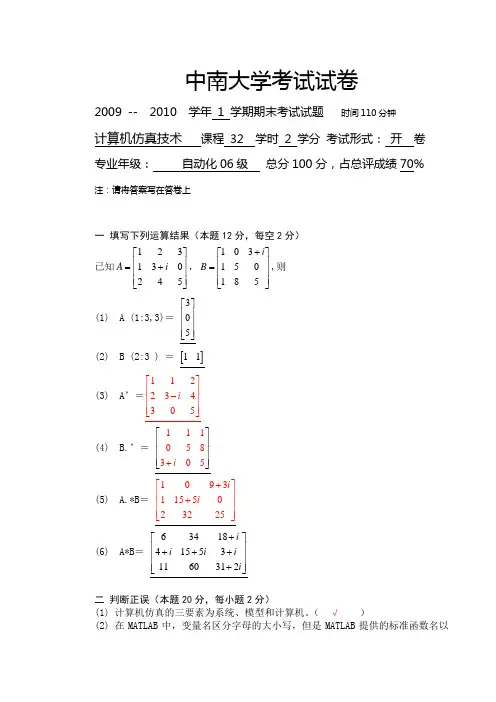
中南大学考试试卷2009 -- 2010 学年 1 学期期末考试试题 时间110分钟计算机仿真技术 课程 32 学时 2 学分 考试形式: 开 卷 专业年级: 自动化06级 总分100分,占总评成绩70% 注:请将答案写在答卷上一 填写下列运算结果(本题12分,每空2分)已知⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+=542031321i A ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+=581051301i B ,则 (1) A (1:3,3)= 305⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦(2) B (2:3 ) = []11(3) A ’=112234305i ⎡⎤⎢⎥-⎢⎥⎢⎥⎣⎦(4) B.’= 111058305i ⎡⎤⎢⎥⎢⎥⎢⎣⎦+⎥ (5) A.*B = 10931155023225i i +⎡⎤⎢⎥+⎢⎥⎢⎥⎣⎦(6) A*B = 63418415531160312i i i i i +⎡⎤⎢⎥+++⎢⎥⎢⎥+⎣⎦二 判断正误(本题20分,每小题2分)(1) 计算机仿真的三要素为系统、模型和计算机。
( √ )(2) 在MATLAB 中,变量名区分字母的大小写,但是MATLAB 提供的标准函数名以及命令名必须用小写字母。
( × )(3) MATLAB 中运算符号前带有小点表示执行元素对元素的运算。
( √ )(4) 在MATLAB 中,2ⅹ2的矩阵A=[1 2,3 4]是一种正确的输入方式。
( × )(5) clc 命令不仅用于清除命令窗口显示的内容同时也删除MATLAB 工作空间中的变量。
( × )(6) MATLAB 提供了3种逻辑操作符,其中~表示非。
( √ )(7) subplot(211)把屏幕分成两个部分,并把曲线放在左半部分。
( × )(8) 数值积分法中,计算步长越小,总误差越小。
( × )(9) tf2ss 函数只能将传递函数模型转换成为可控标准型状态方程。
( √ )(10) 函数文件中函数名称和文件名可以不同。
计算机仿真试题和答案
控制系统计算机辅助设计综合实验指导实验名称:连续与离散系统校正实验,系统可控性与可观性实验,系统的simulink仿真实验陈茜编实验人:苏建聪学号:200830810122班级:08电气工程及其自动化1班信息工程系实验任务书1. 有一个单位负反馈控制系统,如果控制对象的传递函数为设计要求:① 相角裕度≥45°;② 当系统的输入信号是单位斜坡信号时,稳态误差ess ≤0.04。
③ 要求绘制出校正后系统和未校正系统的Bode 图及其闭环系统的单位阶跃响应曲线,并进行对比。
2. 有一个单位负反馈控制系统,如果控制对象的传递函数为:试设计一个串联滞后校正装置。
设计要求:①相角裕度≥45°;② 当系统的输入信号是单位斜坡信号时,稳态误差ess ≤0.04。
③ 要求绘制出校正后系统和未校正系统的Bode 图及其闭环系统的单位阶跃响应曲线,并进行对比。
3. 有一个单位负反馈控制系统,如果控制对象的传递函数为 ()()4+=s s k s G p试设计一个串联超前滞后校正装置,设计要求: ①相角裕度≥45°;② 当系统的输入信号是单位斜坡信号时,稳态误差ess ≤0.04。
③ 要求绘制出校正后系统和未校正系统的Bode 图及其闭环系统的单位阶跃响应曲线,并进行对比。
4. 系统结构图如图所示,其中,采样周期Ts=0.01s ,被控对象()()110+=s s s G ,()s G h 为零阶保持器。
用W 变换法设计一超前校正装置D(z),使系统相位裕度γ≥50°,校验设计后系统的性能指标。
5. 系统结构图如图所示,其中,采样周期Ts=0.01s ,被控对象1)s(0.2s k )(+=s G ο,()s G h 为零阶保持器。
用对数频率法设计D(z),使系统开环增益k ≥30(1/s),截止频率ωc ≥15(1/s),相位裕度γ≥50 °1使 s 11se -1(s)-Tsh T G +≈=,求出未校正系统的开环系统的开环传递函数(s)(s)G G (s)0s =G ,的传递函数模型参数。
计算机仿真习题及答案
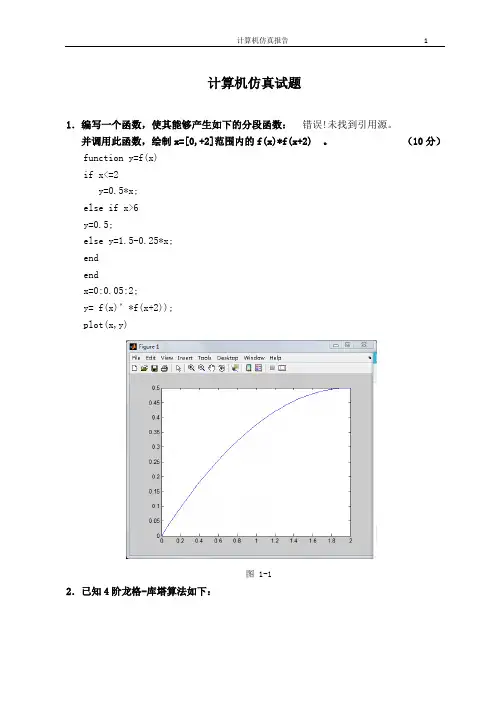
计算机仿真试题1.编写一个函数,使其能够产生如下的分段函数:错误!未找到引用源。
并调用此函数,绘制x=[0,+2]范围内的f(x)*f(x+2) 。
(10分)function y=f(x)if x<=2y=0.5*x;else if x>6y=0.5;else y=1.5-0.25*x;endendx=0:0.05:2;y= f(x)’*f(x+2));plot(x,y)图 1-12.已知4阶龙格-库塔算法如下:试利用该算法求解以下微分方程:(15分)本题可以调用MATLAB函数中龙格-库塔算法函数ode45,首先编写m文件:function dy=func(x,y)dy=-y+1;end再在主窗口调用此文件:[x,y]=ode45('func',[0,5],0)%这里的[0,5]为任取区间,表示方程在此范围的解。
运行结果如下:x =0.00010.00010.00020.00020.00050.00070.00100.00120.00250.00370.00500.00620.01250.01880.02510.0313 0.06270.09410.12550.15690.28190.40690.53190.65690.78190.90691.03191.15691.28191.40691.53191.65691.78191.90692.03192.15692.28192.40692.53192.65692.78192.90693.03193.15693.28193.40693.53193.65693.78193.90694.03194.15694.28194.40694.53194.65694.74274.82854.91425.0000y =0.00010.00010.00020.00020.00050.00070.00100.00120.0025 0.0037 0.0050 0.0062 0.0124 0.0186 0.0248 0.0309 0.0608 0.0898 0.1180 0.1452 0.2457 0.33430.41250.48160.54250.59630.64370.68550.72250.75510.78390.80930.83170.85150.86890.88430.89790.90990.92050.92980.93810.94540.95180.95740.96240.96690.97080.97420.97720.97990.98230.98430.98620.98780.98920.99050.99130.99200.99270.9933为只管起见,我们使用函数命令画出x-y(plot(x,y))的关系如下图:图1-23.用matlab语言求下列系统的状态方程、传递函数、零极点增益、和部分分式形式的模型参数,并分别写出其相应的数学模型表达式:(15分)(1)G(s)=324327242410355024s s ss s s s+++++++(2).X=2.25 -5 -1.25 -0.542.25 -4.25 -1.25 -0.2520.25 -0.5 -1.25 -121.25 -1.75 -0.25 -0.75 0X⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦uy= [0 2 0 2] X解:(1)a)求对应状态方程参数:num=[1 07 24 24]; den=[1 10 35 50 24]; [A,B,C,D]=tf2ss(num,den) 运行结果:A =-10 -35 -50 -241 0 0 00 1 0 00 0 1 0B =1C =1 7 24 24D =故,状态方程为:.X = x+ uY=[1 7 24 24]xb)求对应零极点增益模型参数:num=[1 07 24 24]; den=[1 10 35 50 24]; [Z,P,K]=tf2zp(num,den) 运行结果如下: Z =-2.7306 + 2.8531i -2.7306 - 2.8531i -1.5388P = -4.0000 -3.0000 -2.0000 -1.0000K = 1故变换后的零极点模型为: G(s)=c)求对应部分分式型:num=[1 07 24 24]; den=[1 10 35 50 24]; [R,P,H]=residue(num,den) 运行结果如下: R =4.0000 -6.0000 2.0000 1.0000P =-4.0000 -3.0000 -2.0000 -1.0000H = []故变换后的部分分式模型为:11223644)(+++++-+=s s s s s G(2)由题给条件,知:A=[2.25 -5 -1.25 -0.5; 2.25 -4.25 -1.25 -0.25;0.25 -0.5 -1.25 -1;1.25 -1.75-10 -35 -50 -24 1 0 0 0 0 1 0 0 0 0 1 010 0 0-0.25 -0.75] B=[4;2;2;0] C=[0 2 0 2],D=0 a)求传递函数矩阵: [num,den]=ss2tf(A,B,C,D) 运行结果为: num =0 4.0000 14.0000 22.0000 15.0000 den =1.0000 4.0000 6.2500 5.25002.2500 故,所对应传递函数模型为:25.225.525.641522144)(23423+++++++=s s s s s s s s Gb)求零极点模型:num=[0 4 14 22 15];en=[1 4 6.25 5.25 2.25]; [Z,P,K]=tf2zp(num,den) 运行结果为: Z =-1.0000 + 1.2247i -1.0000 - 1.2247i -1.5000 P =-1.5000 -1.5000 -0.5000 + 0.8660i -0.5000 - 0.8660iK =4.0000故,零极点模型为:)866.05.0()5.1()2247.11)(5.1(4)(2i s s i s s s G ±++±++=c)求对应部分分式模型: [R,P,H]=residue(num,den) 运行结果为: R =4.0000 -0.0000-0.0000 - 2.3094i -0.0000 + 2.3094iP =-1.5000 -1.5000 -0.5000 + 0.8660i -0.5000 - 0.8660iH = []故变换后的部分分式模型为:i s ii s i s s G 866.05.03094.2866.05.03094.25.14)(+++-+-++=4.已知一单位反馈系统开环传递函数为:,试绘制系统Nyquist图,判断闭环系统的稳定性,并求其单位阶跃响应。
《计算机仿真技术》试题(含完整答案)
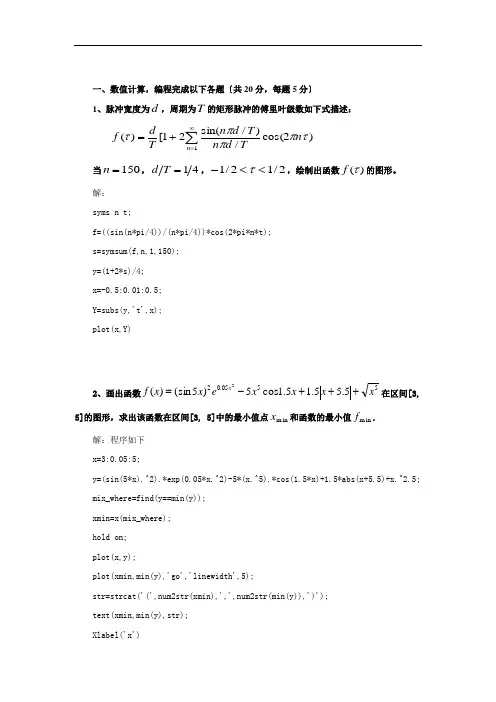
一、数值计算,编程完成以下各题〔共20分,每题5分〕1、脉冲宽度为d ,周期为T 的矩形脉冲的傅里叶级数如下式描述:)2cos(/)/sin(21[)(1τπππτn T d n T d n T d f n ∑∞=+=当150=n ,41=T d ,2/12/1<<-τ,绘制出函数)(τf 的图形。
解: syms n t;f=((sin(n*pi/4))/(n*pi/4))*cos(2*pi*n*t); s=symsum(f,n,1,150); y=(1+2*s)/4; x=-0.5:0.01:0.5; Y=subs(y,'t',x); plot(x,Y)2、画出函数5505.025.55.15.1cos 5)5(sin )(2x x x x ex x f x +++-=在区间[3,5]的图形,求出该函数在区间[3, 5]中的最小值点m in x 和函数的最小值m in f .解:程序如下 x=3:0.05:5;y=(sin(5*x).^2).*exp(0.05*x.^2)-5*(x.^5).*cos(1.5*x)+1.5*abs(x+5.5)+x.^2.5; mix_where=find(y==min(y)); xmin=x(mix_where); hold on; plot(x,y);plot(xmin,min(y),'go','linewidth',5);str=strcat('(',num2str(xmin),',',num2str(min(y)),')'); text(xmin,min(y),str); Xlabel('x')Ylabel('f(x)')经过运行后得到的图像截图如下:运行后的最小值点m in x =4.6,m in f = -8337.86253、画出函数xe x xf x 5.2cos )(3.02-⋅=-在[1,3]区间的图形,并用编程求解该非线性方程0)(=x f 的一个根,设初始点为20=x .解: x=1:0.02:3; x0=2;y=@(x)(cos(x).^2).*exp(-0.3*x)-2.5*abs(x); fplot(y,[1,3]); Xlabel('x') Ylabel('f(x)')X1=fzero('(cos(x).^2).*exp(-0.3*x)-2.5*abs(x)',x0)运行后求得该方程的一个根为z=0.3256。
《计算机仿真技术》试卷B(含答案)
《计算机仿真技术》考试试卷(B 卷)班级 姓名 学号一.填空题。
(每空1分,共20分)1、计算机仿真技术三要素是_______________、_________________、________________。
2、计算机仿真中模型能够代表系统来进行研究,模型主要有________________、________________、________________、________________等几类模型。
3、叙述simulink 中常见的固定步长的仿真算法有:________________、________________、________________、________________。
(任举四种)4、MATALB 主要相似性主要包含以下几种相似_________________、________________、___________________。
5、Simulink 中主要包含_________________、________________、_______________等几种模块。
6、符号运算中,泰勒级数计算的函数是________________,拉普拉斯变换的函数________________,傅里叶级数的计算函数是________________。
二.简答题。
(本题5小题,每题8分,共40分)1、简述根据信号类型分类,计算机仿真主要包含哪几种类型。
2、简述蒙特卡洛法建模的步骤。
3、m 函数文件和m 文本文件之间的区别。
4、叙述三维立体绘图常用的几个绘图指令及其功能。
5、简述matlab 软件的基本组成三.编程题 (本题6小题、共40分)根据下面要求,只需写出程序代码,不需计算结果和图形。
1、(5分)写出右面的矩阵D ,求出其大于4的元素有几个,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=059123107D并通过变量列出其在矩阵的位置和序号2、(5分)求解下面矩阵A 的行列式和逆矩阵,并利用命令取出系数矩阵的逆矩阵的第二行的数据,以小数点后面两位数值的形式显示出来。
计算机仿真与建模技术考核试卷
10.哪些因素可能导致仿真结果的误差?()
A.模型简化的假设
B.数值计算方法的选择
C.输入数据的准确性
D.计算机硬件的限制
11.以下哪些属于系统动力学模型的基本元素?()
A.状态变量
B.流率变量
C.辅助变量
D.常量
12.在仿真项目中,以下哪些步骤是必要的?()
A.明确仿真目标
B.设计仿真实验
C.编写仿真程序
D.分析仿真结果
13.以下哪些软件可以用于复杂系统仿真?()
A. AnyLogic
B. Simulink
C. LabVIEW
D. ProModel
14.哪些方法可以用来提高仿真模型的效率?()
A.简化模型结构
B.优化算法
C.并行计算
D.减少仿真时间
15.在仿真模型的灵敏度分析中,以下哪些是常用的方法?()
D.主成分分析
11.关于计算机仿真与建模,以下哪个说法是正确的?()
A.计算机仿真可以完全替代实验研究
B.建模过程中,模型越复杂越好
C.计算机仿真可以节省实验成本和时间
D.计算机仿真与建模适用于所有领域
12.以下哪个软件主要用于过程建模和仿真?()
A. Arena
B. CAD
C. MATLAB
D. Microsoft Visio
五、主观题(本题共4小题,每题5分,共20分)
1.请简述计算机仿真的基本步骤,并说明每个步骤的重要性。
2.描述连续系统仿真与离散事件仿真的区别,并给出各自适用的场景。
3.什么是敏感性分析?它在计算机仿真中的作用是什么?
4.解释面向对象建模中的“封装”、“继承”和“多态”的概念,并给出实际应用中的例子。
计算机仿真题库
25. 请比较数值积分法与离散相似法的区别。 数值积分法比较成熟,精度较高,但计算公式复杂,计算量大,适合离线仿真;而离散 相似法计算公式简单,计算量小,速度快,但精度较低,适合在线仿真。 26. 物理仿真 以真实系统的物理性质和几何形状相似为基础而其他性质不变来构造系统的物理模型, 并在物理模型上进行实验的过程称为物理仿真,也称为实体仿真。其优点在于直观、形象; 缺点在于模型改变困难,实验限制较多,投资较大。 27. 虚拟现实 虚拟现实是用高科技手段构造出来的一种人工环境,它具有模仿人的视觉、听觉、触觉 等感知功能的能力,具有使人可以亲身体验沉浸在这种虚拟环境并与之相互作用的能力。 28. 多媒体仿真 将数字、文字、声音、图形、图像和动画等各种媒体有机组合,并与先进的计算机通信 和广播电视技术相结合,形成一个可组织、存储、操纵和控制多媒体信息的集成环境和交互 系统的仿真技术。 29. 根据系统的动态特性,一般可以将系统做哪些分类? 根据系统的动态特性,可以将系统分为: (1)连续系统和离散系统。时间和各个组成部 分的变量都具有连续形式的系统称为连续系统; 全部或一些组成部分的变量具有离散信号形 式的系统称为离散系统。 (2)线性或非线性系统。如果微分方程的系数是常数或者仅仅是自 变量的函数, 则为线性微分方程, 其符合叠加性原理, 可分为线性定常系统, 线性时变系统; 非线性系统用非线性微分方程表示,其不符合叠加原理。 (3)确定系统和随机系统。确定系 统可以用确定的数学模型进行描述, 输出和输入变量之间有完全确定的函数关系; 随即系统 则指系统内部或环境变量发生不确定变动, 会影响输出变量。 (4) 单变量系统和多变量系统。 这是对输入输出变量个数而言的。 30. 在连续系统的数字仿真中, 仿真算法的选择一般为考虑什么?常用的仿真算法有哪些? 在连续系统的数字仿真中,选择仿真算法一般会考虑求解精度、速度、数值稳定性、自 启动能力、步长等。常用的仿真方法有:欧拉法、四阶龙格-库塔法、离散相似法等。欧拉 法属于自启动算法,适用于线性系统和非线性系统,方法简单,但误差的积累导致求解精度 降低。四阶龙格库塔法也属于自启动算法,适用于线性和非线性系统,支持单步长和可变步 长,求解速度和精度较高,但仿真时间较长。离散相似法一般用于状态方程,按环节离散相 似法可用于非线性系统,按系统离散相似法仅限于线性系统。 31. 什么是实时仿真?什么情况下需要进行实时仿真?它在算法上有什么要求? 实时仿真是指仿真模型的时间比例尺等于系统原模型的时间比例尺的一类仿真,对系统 进行仿真试验时,如果仿真系统有实物,由于实物和人是按真实时间变化和运动的,因此就 需要进行实时仿真。实时仿真要求仿真系统接收实时动态输入,并产生实时动态输出,输入 和输出通常为固定采样时间间隔的数列。 32. 什么是数值稳定性问题?如何保证计算中的数值稳定性? 所谓的数值稳定性问题,是指在扰动影响下,其计算过程中误差的积累是否受到控制的 问题。要保证数值稳定性,应遵循两条原则: (1)保证计算稳定; (2)有一定的计算精度来 选择合理的计算步长。
系统仿真技术阶段练习一及答案
系统仿真技术阶段练习⼀及答案系统仿真技术阶段练习⼀第⼀章:计算机仿真技术概述1.系统的概念,系统的边界。
2.模型的定义。
3.简述模型型谱。
4.仿真的定义。
5. 仿真三要素及三项基本活动之间的关系。
6.按照状态变量的特点,系统怎么分类?第⼆章数学建模⽅法1.什么是机理建模,对典型的RLC 电路进⾏建模。
2.什么叫做数据建模?数据建模的前提及主要⽅法。
3. 什么叫系统辨识,常见的系统辨识⽅法。
⿊箱⽩箱经济⽣理经济过程控制动⼒学电⼦电路集中参数常微分⽅程分布参数偏微分⽅程离散时间差分⽅程4.最⼩⼆乘的定义,公式?5.简述模糊建模、神经⽹络建模、模糊神经⽹络建模的定义,特点。
第⼀章:计算机仿真技术概述1.系统的概念,系统的边界。
答:A system can be defined as a set of component which are related by some forms of interaction ,and which act together to achieve some objective or purpose.在定义⼀个系统时,⾸先要确定系统的边界。
尽管世界上的事物是相互联系的,但当我们研究某⼀对象时,总是要将该对象与其环境(environment)区别开来。
边界确定了系统的范围。
边界以外对系统的作⽤称为系统的输⼊,系统对边界以外的环境的作⽤称为系统的输出。
2.模型的定义。
答:是对真实系统中那些有⽤的和令⼈感兴趣的特性的抽象化。
模型并不是对真实系统的完全复现。
如果M 能够⽤来回答关于系统(S)的问题,并且在精度范围A 之内,那末M 就是系统S 的模型。
3.简述模型型谱。
答:⽩箱:运⾏机理了解⽐较深⼊,基本上可以通过演绎的⽅法来建⽴模型;灰箱:对系统不太了解,要通过演绎和归纳相结合的⽅法来建⽴模型;⿊箱:对系统了解不太清楚,主要通过系统辨识的⽅法或数据收集和统计归纳的⽅法来建⽴模型,由于数据掌握得不够多,模型精度⼀般⽐较差。
计算机仿真技术试卷B
题号 一 二 三 四 总分 得分一、填空(共15分,每空1分)1.机械系统的分类是 、 。
2.仿真系统模型的应用分别是 、 、 。
3.空间状态模型主要包括 、 。
4.机械工程领域常见的数字仿真算法是; 、 。
5.功率键合图主要组成部分是 、 、 、 、 。
二、根据系统模型编写C 程序求曲柄滑块机构的位移、速度、加速度(共15分)弹簧质量系统如下图,相关参数为k1=1.2,k2=1.5,k3=1.6。
三、建立空间状态方程(共20分,每题10分)1、 分析质量弹簧系统,列出该系统的微分方程然后根据微分方程写出其状态方程2、将传递函数转化为空间状态方程写出计算步骤得分阅卷人 得分阅卷人 得分阅卷人2四、画出下列系统的功率键合图并写出绘图步骤(共30分,每题10分)1. 绘出右图的键合图并写出步骤2. 绘出右图小车系统键合图并写出绘图步骤3. 一个生长在罐中的细菌的简单模型。
假定细菌的出生率和当前细菌的总数成正比,死亡率和当前的总数的平方成正比,试建立仿真模型,画出键合图。
五、列出系统的状态方程和simulink 模型(共20分)列出右图蹦极系统的状态方程并写出其状态方程。
桥梁距地面的距离是h2=50m ,人距桥梁的距离是h1=30m 。
系统参数为k=20,a1=a2=1,m=70,g=10系统数学模型是2009~2010学年第二学期《计算机仿真技术》期终试卷(B卷)…………………………………装…………订………线…………………………………专业级班姓名学号得分…………………………………密…………封…………线………………………………第3 页共3 页。
计算机仿真技术试题含完整答案
一、数值计算,编程完成以下各题(共20分,每小题5分) 1、脉冲宽度为d ,周期为T 的矩形脉冲的傅里叶级数如下式描述:)2cos(/)/sin(21[)(1τπππτn T d n T d n T d f n ∑∞=+=当150=n ,41=T d ,2/12/1<<-τ,绘制出函数)(τf 的图形。
解: syms n t;f=((sin(n*pi/4))/(n*pi/4))*cos(2*pi*n*t); s=symsum(f,n,1,150); y=(1+2*s)/4; x=-0.5:0.01:0.5; Y=subs(y,'t',x); plot(x,Y)2、画出函数5505.025.55.15.1cos 5)5(sin )(2x x x x ex x f x +++-=在区间[3,5]的图形,求出该函数在区间[3, 5]中的最小值点m in x 和函数的最小值m in f .解:程序如下 x=3:0.05:5;y=(sin(5*x).^2).*exp(0.05*x.^2)-5*(x.^5).*cos(1.5*x)+1.5*abs(x+5.5)+x.^2.5; mix_where=find(y==min(y)); xmin=x(mix_where); hold on; plot(x,y);plot(xmin,min(y),'go','linewidth',5);str=strcat('(',num2str(xmin),',',num2str(min(y)),')'); text(xmin,min(y),str); Xlabel('x')Ylabel('f(x)')经过运行后得到的图像截图如下:运行后的最小值点m in x =4.6,m in f = -8337.86253、画出函数xe x xf x 5.2cos )(3.02-⋅=-在[1,3]区间的图形,并用编程求解该非线性方程0)(=x f 的一个根,设初始点为20=x .解: x=1:0.02:3; x0=2;y=@(x)(cos(x).^2).*exp(-0.3*x)-2.5*abs(x); fplot(y,[1,3]); Xlabel('x') Ylabel('f(x)')X1=fzero('(cos(x).^2).*exp(-0.3*x)-2.5*abs(x)',x0)运行后求得该方程的一个根为z=0.3256。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
、数值计算,编程完成以下各题(共20分,每小题5 分)1、脉冲宽度为d,周期为T的矩形脉冲的傅里叶级数如下式描述:d[i.^= sin(^d/T)cos(^:n.)T n」n rd /T当n =150,d..「T =1;4,- 1/2 :::.::: 1/2,绘制出函数f(.)的图形。
解:syms n t;f=((si n(n *pi/4))/( n*pi/4))*cos(2*pi* n*t);s=symsum(f, n,1,150);y=(1+2*s)/4;x=-0.5:0.01:0.5;Y=subs(y,'t',x);plot(x,Y)2 0 05x2 5 ■ 52、画出函数f (x)二(sin 5x) e .- 5x cos1.5x 1.5x 5.5 x 在区间[3, 5]的图形,求出该函数在区间[3, 5]中的最小值点X min和函数的最小值f min .解:程序如下x=3:0.05:5;y=(si n(5*x).A2).*exp(0.05*x.A2)-5*(x.A5).*cos(1.5*x)+1.5*abs(x+5.5)+x.A2.5;mix_where=fi nd(y==mi n(y));xmin=x(mix_where);hold on;plot(x,y);plot(xmi n,min (y),'go','li newidth',5);str=strcat('(' ,nu m2str(xmi n),',' ,nu m2str(mi n(y)),')');text(xmi n,min (y),str);Xlabel('x')Ylabel('f(x)')经过运行后得到的图像截图如下:运行后的最小值点X min =4.6 , f m in = -8337.86253、画出函数f (x) = cos2x「e^'x — 2.5 X在口,3]区间的图形, 解该非线并用编程求性方程 f (x) = 0的一个根,设初始点为X o = 2 .解:x=1:0.02:3;x0=2;y=@(x)(cos(x).A2).*exp(-0.3*x)-2.5*abs(x);fplot(y,[1,3]);Xlabel('x')Ylabel('f(x)')X仁fzero('(cos(x).A2).*exp(-0.3*x)-2.5*abs(x)',x0)运行后求得该方程的一个根为z=0.3256 。
4、已知非线性方程组如下,编程求方程组的解,设初始点为[1 0.5 -1].解:%在新建中建立函数文件 fun2_4.m fun ctio n f=fun 2_4(x)f=[x(1)A2+x(1)*sqrt(7)+2;x(1)+5*x(3)A2-3;x(2).*x(3)+3]; 嵋E 线性方程组求解主程序 fxxfcz.m x0=[1 0.5 -1]; fsolve(@fu n2_4,x0) 运行后结果为:ans =-1.3229 3.2264 -0.9298 即是 x=-1.3229 y=3.2264 z=-0.9298 .控制系统仿真(15分)''.-■crtruls *1 Haw la Add H WFuriS Nmv» EUA C 匚:低豐“ LOTTO [HalLapCiui2_4. ■' I*?? Irgut :Heigart "aT is undMuiesL lif-ar JJI =>■ !Z4CiW W 険m+S K frJ:K Q).3翊】: 1IF <T in => ru 丄1 卅mlan f CH LI I -X * A [■ J ;' ],i [>> nmfC; TJsfris ! FMW 叩 吐诉阳■利】力 IfrrtLthd 】.时)-1,123 ttW*Wurlu«j«» ■ □ *富勾■労*1 电, 圧)Lahd diiti to pict▼Mirnp *Cass-kxLDIl dcBiHn> dodblaffl jniCH々 II E L inffl."sym 1® I"」-LxL ・、Tn.・¥|Vn Ci 4 LxL ijm." Vffn D -LsL ・ym.・ vfmH =t LsLDLI1.Q3 DM -1]■Joddn由y々 L E L Bym :"n^vnf UTK 4 s-ant= k £l).'E (II *a^ni :7l +E.t I L)-Hi*M(3l ruiCCi' ijsnsLfeMJft .te5i+«j- ?H'iEE * run 1" C : Txi rx LEBOVC hxhl a; 库 KB ~ ' CLfflCCl'Csti :! LE30VC &411T 峪弘讯电上・」 Mt Ci AKEi'mW &esi+w 畀祈EEs*~'f ID &W 3rtopp«d hKsuia! it日 tZ^unc" 3an a an Ln%opuam. H 田曲》" = MO Ctht dAttidT Tilui?.ans =-L.1223 J. Z2Q4 -P.3E59勺二丄化匚 irtmr-gd亡J_Trfsolw 5r>3pj4d bec«ii5e it ectfrita cJrt tunci i«n evaliiH i^n lukir^ 旳2厲".ihhHinJ・』x5 ■ 39(1 Ctbw dffvuH 6】*)-MIX ・\k» <f- £ttrt4> MATLA6 7丄Lfl :R201Db]Fie Bdk Dt4>ug P-iraJId Onkwp Wndo« Hdpvn 菱记 biisl 寸仃口 4事20I V9/T n :0l.clwrj clc賈-luh 七‘ r xl :ple4il P YF edit ■"Eyanui .f, n, J” 1首8 t ;t= I ^suiiwrpL/i I )/6in?i/ 4>] ■cas i t±ipi*p.匚urrarf FaHarz E^HMdab jruh^ng'ijbin[=■111' In^iN I尸sy*sg 收」Ht 1? l'M!> f =■ I鼻iiV*叩I / ln^-i/4'lsy*5 mf ■■ I ^Ean li»FpLi l *^l JfGnppi/屯、I 中 c*® 事某控制系统的开环传递函数为:G(S) =6(1.5S 1)(°.12s 1,要求:编制一个完整s(6s+1)(0.05s+1)的程序完成以下各小题的要求,所绘制的图形分别定义为四张图。
1)绘制出系统的阶跃信号响应曲线(响应时间为0~30s)2)绘制出系统的脉冲信号响应曲线(响应时间为0~20s)3)绘制出系统的斜坡信号响应曲线(响应时间为0~10s)4)绘制出系统的Bode图(要求频率范围为10- ~102rad/sec)解:由传递函数知,该传递函数是将其用零极点描述法描述的,将其化为用传递函数表〜c、1.08s2+9.72S+6G(S) = ------- 3 ------------------ 2--------述的形式为:0.3s 6.05s S,所以nu m=[0 1.08 9.72 6],de n=[0.3 6.05 1 0]。
%用传递函数编程求解nu m=[0 1.08 9.72 6];den=[0.3 6.05 1 0];sys=tf( nu m,de n);t1=0:0.1:30;figure(1)step(sys) % 绘制出系统的阶跃信号响应曲线t2=0:0.1:20;figure(2)impulse(sys) % 绘制出系统的脉冲信号响应曲线t3=0:0.1:10;figure(3)ramp=t3;Isim(sys,ramp,t3);% 绘制出系统的斜坡信号响应曲线figure(4)w=10A(-2):10A2;bode(sys,w);%绘制出系统的Bode图耳10 Sb4UTime-fig(1) 系统的阶跃信号响应曲线fig(2) 系统的脉冲信号响应曲线fig(3) 系统的斜坡信号响应曲线耳10Sb4U三、曲线拟合(15分)已知某型号液力变矩器原始特性参数,要求用多项式拟合的方法编程完成以下各小题: 1) 用二阶多项式拟合出 K (i)曲线;用三阶多项式拟合出 (i)曲线;用三阶多项式 拟合出■ B(i)曲线。
2)用不同的颜色和不同的线型, 将K (i)的原始特性参数数据点和二阶拟合曲线绘制在同一张图形中;将 (i)的原始特性参数数据点和三阶拟合曲线绘制在同一张图形中;将■ B(i)的原始特性参数数据点和四阶拟合曲线绘制在同一张图形中。
3)运行程序,写出K (i)曲线的二阶拟合公6D日 m3 涉Oaarflfn-12Dfig(4) 系统的Bode 图式、(i)曲线的三阶拟合公式和■ B(i)曲线的四阶拟合公式。
VJ355液力变矩器部分原始特性参数;转速比f变矩比聲觀¥ 70r0ft5237OJ5426,775232022726.S4S 0J47223032727J470JS7 2.1?0.4(1327.0.2431A)504972KO520.295 1.960.57628.3890..M4].S70.6442SA450.398 1.7S0.70728.7560.448075728.645[.刃07^528.243解:% 曲线拟合(Curve fitting )disp(' In put Data--i; Output Data--k(i),\eta(i),\lambdaB(i):')x=[0.065,0.098,0.147,0.187,0.243,0.295,0.344,0.398,0.448,0.499];y1=[2.37,2.32,2.23,2.15,2.05,1.96,1.87,1.78,1.69,1.59];y2=[0.154,0.227,0.327,0.403,0.497,0.576,0.644,0.707,0.757,0.795];y3=[26.775,26.845,27.147,27.549,28.052,28.389,28.645,28.756,28.645,28.243];figure(1)pf仁polyfit(x,y1,2)px1=polyval(pf1,x)plot(x,px1,'k')gridxlabel('转速比i')ylabel('变矩比K')title(' 二阶多项式拟合k曲线')%pausefigure(2)plot(x,px2,'b')gridxlabel('转速比i')ylabel('效率\eta')title(' 三阶多项式拟合\eta曲线')%pausefigure(3)pf3=polyfit(x,y3,4)px3=polyval(pf3,x)plot(x,px3,'-r')gridxlabel('转速比i')ylabel(' 泵轮转矩系数\lambdaB')title(' 四阶多项式拟合\lambdaB曲线')%figure(4)pf仁polyfit(x,y1,2)px1=polyval(pf1,x)plot(x,y1,'or',x,px1,'k')gridxlabel('转速比i')ylabel('变矩比K')title(' 二阶多项式拟合k曲线')Legend('原始数据','拟合曲线')%各的原始特性参数数据点和二阶拟合曲线绘制在同一张图形中pausefigure(5)pf2=polyfit(x,y2,3)px2=polyval(pf2,x)plot(x,y2,'*m',x,px2,'b') gridxlabel ('转速比 i') ylabel ('效率 \eta')title (' 三阶多项式拟合\eta 曲线') Legend ('原始数据','拟合曲线',0)%各的原始特性参数数据点和三阶拟合曲线绘制在同一张图形中 pause figure (6)pf3=polyfit (x,y3,4) px3=polyval (pf3,x ) plot (x,y3,'pk',x,px3,'-r') gridxlabel ('转速比 i')ylabel (' 泵轮转矩系数\lambdaB') title (' 四阶多项式拟合\lambdaB 曲线') Legend ('原始数据','拟合曲线',0)%各的原始特性参数数据点和四阶拟合曲线绘制在同一张图形中 K (i )曲线的二阶拟合公式(i )曲线的三阶拟合公式运行后的结果如下:运行后的二阶,三阶,四阶拟合曲线函数为: y1 = 0.01325 x A 2 - 1.8035 x + 2.491y2 =-0.12713 乂人3 - 1.6598 xA2 + 2.4499 x + 0.0025474y3 =106.7407 xA4 - 199.9852 乂人3 + 95.8404 乂人2 - 8.7272 x + 26.9754y1=poly2str(pf1,'x') % y2=poly2str(pf2,'x') %y3=poly2str(pf3,'x') % 'B(i )曲线的四阶拟合公式四、微分方程求解。