adpll_modeling
ADPLL学习

ADPLL系统设计与实现①IP核应用,新建工程,添加文件后,IP catalog里面找到要的IP核然后新建,最后在文件中实例化编译就可以直接用了。
②原理图插入:这样可以调用锁存器和触发器,方法:file->new->block blackgram/schematic file->右键空白处insert symbol->storage->dff③此处有关于脚本调试仿真(来源于quartus ii调用modelsim自动产生的脚本文件,直接修改可用),看完一次波形后,可以把想要的波形及它的radix保存为wave.do文件到所在工程目录下,下次仿真直接run wave.do就可以了。
/emouse/archive/2012/07/08/2581223.html④利用quartus II调用过modelsim一次后,会将IP核所需要的LIBRARY编译到modelsim 的库中去,所以,以后只要不修改IP核文件,在modelsim中可直接进行编译仿真,节省大量的时间。
PLL种类:LPLL、DPLL、ADPLL、SPLL(软件实现)锁相环的工作原理:表面看是用鉴相器的输出控制VCO的频率,但实际是通过瞬时频率的积分达到相位控制,最终使反馈到鉴相器的瞬时相位与输入的瞬时相位之差趋于零基本结构:数字锁相环工作过程:(1)当环路失锁时,鉴相器比较输入信号和输出信号之间的相位差异,并产生数字环路滤波器的计数方向控制信号(DNUP)。
(2)数字环路滤波器是由计数容量(模数)为K 的可逆计数器构成。
K 变模可逆计数器根据计数方向控制信号(DNUP )调整计数值,若ue 为低电平时可逆计数器作加计数,ue 为高电平时可逆计数器作减计数。
当加计数达到K 时产生一个进位脉冲信号(CARRY )作为“进位”指令,当减计数达到0时产生一个借位脉冲信号(BORROW )作为“借位”指令。
(3)相位控制器是由控制脉冲变换电路和门控电路组成。
AADL综述

AADL:嵌入式实时系统体系结构设计与分析语言综述摘要:结构分析和设计语言(architecture analysis and design language)是嵌入式实时系统的一种体系结构描述语言标准,广泛应用于航空宇航工业中对安全关键应用系统模型的建模。
本文首先归纳了AADL的发展历程及其主要建模元素。
其次,介绍了模型检测方法的研究和应用,并就航电系统与模型检测方法做了研究和分析。
最后,探讨了AADL 模型转化为形式化模型,并用模型检测方法进行验证和分析的方法和可行性。
关键字嵌入式实时系统AADL 建模形式化方法模型验证1.引言嵌入式实时系统广泛应用于航空航天、汽车控制、机器人、等安全关键系统领域。
由于计算精度、实时响应的要求的提高,系统变得越来越复杂,如何设计与实现具有高可靠性、高质量的复杂嵌入式实时系统,同时有效的控制开发的效率和成本,成为学术界和工业界共同的话题。
模型驱动开发方法(model driven develop- ment,简称MDD)能够在早期阶段对系统进行分析与验证,有助于保证系统的质量属性,并有效控制开发时间与成本。
而质量属性是由系统体系结构决定的[1]。
因此,基于体系结构模型驱动(model-based architecture-driven)的设计与开发方法成为复杂嵌入式系统领域的重要研究内容。
其中一个重要的方面就是研究合适的体系结构描述语言。
常用的体系结构描述语言主要有UML(unifi-ed modeling language) 和ADL (architecture description language)。
UML侧重描述系统的软件体系结构,为了支持嵌入式实时系统的非功能属性分析,OMG(Object Management Group)先后定义了UML Profile for SPT(schedulability,perfor-mance,and time,简称SPT)[2],UML Profile for Qos/FT(quality of service and fault tolerance,简称Qos/FT)[3]以及UML Profile MARTE(modeling and analysis of real-time and embedded sys-tems)[4],它们继承了UML 的多模型多分析方法,因此模型之间可能存在不一致性;而C2,Darwin,Wright,Aesop,Unicon,Rapide 等ADL都是通用领域的软件体系结构描述语言,难以满足软硬件协同设计、实时响应、资源受限等特定需求;MetaH 是面向航空电子系统的ADL,可以用于嵌入式实时系统体系结构描述与分析,但MetaH 在支持运行时体系结构描述、可扩展、与其他ADL 兼容以及复杂系统设计等方面有所欠缺。
ADPLL学习
ADPLL系统设计与实现①IP核应用,新建工程,添加文件后,IP catalog里面找到要的IP核然后新建,最后在文件中实例化编译就可以直接用了。
②原理图插入:这样可以调用锁存器和触发器,方法:file->new->block blackgram/schematic file->右键空白处insert symbol->storage->dff③此处有关于脚本调试仿真(来源于quartus ii调用modelsim自动产生的脚本文件,直接修改可用),看完一次波形后,可以把想要的波形及它的radix保存为wave.do文件到所在工程目录下,下次仿真直接run wave.do就可以了。
/emouse/archive/2012/07/08/2581223.html④利用quartus II调用过modelsim一次后,会将IP核所需要的LIBRARY编译到modelsim 的库中去,所以,以后只要不修改IP核文件,在modelsim中可直接进行编译仿真,节省大量的时间。
PLL种类:LPLL、DPLL、ADPLL、SPLL(软件实现)锁相环的工作原理:表面看是用鉴相器的输出控制VCO的频率,但实际是通过瞬时频率的积分达到相位控制,最终使反馈到鉴相器的瞬时相位与输入的瞬时相位之差趋于零基本结构:数字锁相环工作过程:(1)当环路失锁时,鉴相器比较输入信号和输出信号之间的相位差异,并产生数字环路滤波器的计数方向控制信号(DNUP)。
(2)数字环路滤波器是由计数容量(模数)为K 的可逆计数器构成。
K 变模可逆计数器根据计数方向控制信号(DNUP )调整计数值,若ue 为低电平时可逆计数器作加计数,ue 为高电平时可逆计数器作减计数。
当加计数达到K 时产生一个进位脉冲信号(CARRY )作为“进位”指令,当减计数达到0时产生一个借位脉冲信号(BORROW )作为“借位”指令。
(3)相位控制器是由控制脉冲变换电路和门控电路组成。
ADPSS-LAB实时仿真系统介绍共9页文档
ADPSS-LAB电力电子、电力系统实时仿真方案中国电力科学研究院2019年10月目录1 系统综述........................................... - 0 -2 系统组成........................................... - 0 -3 电力电子、电力系统实时仿真存在的问题............... - 1 -4 解决方法........................................... - 2 -5 ADPSS-LAB实时仿真系统的功能....................... -6 -电力电子系统实时仿真方案1 系统综述实时仿真是研究电力电子、电力系统复杂的工作过程、优化系统与运行的重要手段。
电力电子、电力系统实时仿真经历了从第一代模拟分析系统,到第二代模拟/数字混合仿真系统,再到第三代数字实时仿真系统的发展过程。
ADPSS-LAB正是第三代数字实时仿真系统的代表产品。
ADPSS-LAB是一种基于并行计算技术、采用模块化设计的电力电子、电力系统实时仿真系统。
它既可以在普通PC机上进行离线仿真,也可通过并行计算机与实际的电力电子器件联接而进行实时在线仿真。
与前两代仿真系统相比,ADPSS-LAB具有以下优势:1)既可以对电力电子、电力系统机电和电磁暂态分别进行实时仿真,同时也可以对机电和电磁暂态混合系统进行实时仿真。
2)仿真精度高;ADPSS-LAB在实时仿真过程中采用32位双精度浮点数运算,其仿真的精度与公认的离线分析软件MATLAB的仿真精度相当。
3)良好的升级和扩充性;ADPSS-LAB由于直接采用商用的基于PC Cluster的连接方式,当仿真的系统规模增大时,只需增加CPU数目和增大内存容量即可,从系统的升级和扩展灵活性等方面有很好的发展前景。
2 系统组成软件部分:实时操作系统:QNX建模软件:MATLAB/simulink,SimPowerSystem电力电子、电力系统实时仿真包电力电子模型库硬件部分:并行处理系统(12-core INTEL CPU)I/O接口模块信号调理模块3 电力电子、电力系统实时仿真存在的问题1)建模的问题仿真系统能够提供友好的图形用户界面,丰富的电力电子、电力系统元件库且模型精度满足仿真要求,同时还要允许用户方便的添加自己的模型。
ADP 軟體 使用說明

圖 14.
[上載應用] 的對話方塊
ADP 6.0使用者手冊 15
2. ADP 軟體使用說明
2.2.6. [上載配方] 及 [下載配方]
[上載配方] ADP 上載人機配方資料到 PC 並儲存為 *.RCP 檔案, 如圖 15。 [下載配方] ADP 會從 PC 選取配方檔案 (*.RCP) 下載到人機。 注意此功能只適用於特定之機型,詳細請參考附錄 A. – ADP 6.0 功能與人機機型對照表。
Source Address Size Total Time
圖 11.
“應用設定” 列印之範例
圖 12.
“畫面總覽” 列印之範例
14 ADP 6.0使用者手冊
2. ADP 軟體使用說明
圖 13.
“畫面本身” 列印之範例
2.2.5. [上載應用] 及 [從…下載應用]
[上載應用] ADP 會上載人機應用程式到 PC,並儲存為 *.AF6 檔 案。見圖 14。 [從…下載應用] ADP 會將檔案 (*.AF6) 從 PC 下載到人機。
ADP 6.0使用者手冊 7
2. ADP 軟體使用說明
2.1.
ADP 軟體簡介
圖 6 標示出 ADP 主要的程式視窗。
標題列
功能表列 工具列
畫面標題 標題列:
ADP 程式視窗
顯示目前 ADP 軟體所製作的應用檔名稱和檔案資料路徑。例如: C:\MyAPP\V6.0 \TEST1.V6F。
2. ADP 軟體使用說明
2.
ADP 軟體使用說明
在各種電腦軟體的發展中,WINDOWS 視窗軟體無疑地已成為主 流,其特點就是讓使用者可直觀地由功能表列或識別圖示 (ICONS) 利用滑鼠直接點取所需功能指令或識別圖示按鈕即可, 故對各行業人士都能輕易地操作視窗軟體。ADP 採用 “所視即所 得” 的先進觀念,使用者可立即在螢幕上看到畫面設計的實際結 果,如各種字形大小、顏色、元件位置、圖形、刻度、底方塊等 等,在螢幕上的顯示都會與實際人機介面所顯示的畫面一樣。而 在編輯操作方法上 ADP 更以 “物件導向” 的理念設計,達到 “拖曳 式” 編輯,讓使用者可將畫面設計工作區中的元件,隨意以滑鼠 拖曳到其它位置,或改變其外形、大小。
I-deas详细介绍
约束和关系设计意图灵活可变的设计可使修改I-DEAS 零件模型变得十分容易,其重要的因素是零件模型不仅仅贮存了最终的几何体--它还贮存了“设计意图”,也就是修改几何体时控制其变化的规则。
这些规则在线框几何体作拉伸和旋转时称为“约束”,当零件进行切割,连接或相交运算时称为“关系”。
零件尺寸和约束也包括用户自定义的等式。
关系和约束同样遵循“先画外形,后定尺寸”的设计原理。
先快速建立起零件,然后再定义尺寸作约束,或者加入几何设计意图规则。
在此先讨论线框几何约束,再论述切割运算的关系。
线框曲线和截面Master Modeler 模块包括两种线框几何体: 曲线和截面。
Master Modeler 模块允许设计人员开始先用 2 D 创建几何体,然后从这个几何体创建出灵活的 3 D 实体。
线框曲线(直线,弧,圆和样条曲线等)能够画在三维空间的工作面上或直接画在零件表面上。
截面由一组定义了边界的曲线组成。
边界可以是封闭的或开放的,边界内可以包括孔。
截面能直接在零件表面或三维空间的工作面上创建。
截面常用拉伸或旋转方法变为实体。
I-DEAS 早期版本的用户对“剖面(Prof iles)”可能比较熟悉,他们想知道剖面与I-DEAS Master Series 中的截面有何不同。
剖面包括一个线框曲线的备份,这就带来一个微妙的问题,因为剖面曲线和线框曲线能用不同的数学等式来描述,因而导致了两者间细微的不同。
I-DEAS Master Series 中的截面仅仅是沿着曲线和曲线截面的一条路径: 曲线不用复制。
剖面可以作为一个独立实体保存,而后I-DEAS Master Series 中截面不能单独进行管理和存贮,它是实体的一部分。
变量约束那些灵活可变的零件是根据I-DEAS 中的变量几何原理从拉伸或旋转截面得来的。
此系统的关键是约束。
头一次使用约束的时候,它看起来和尺寸没有两样,但它实际上并不仅仅是这些。
它是一系列传送“设计意图”的几何规则。
模型驱动的雷达信号处理系统软件开发技术方案
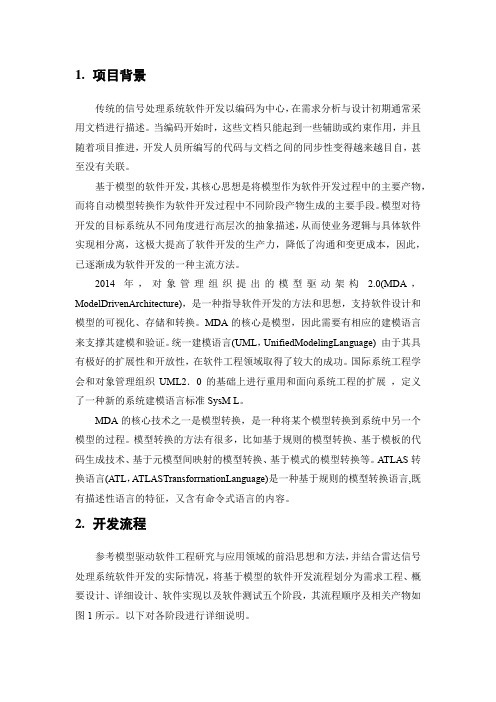
1.项目背景传统的信号处理系统软件开发以编码为中心,在需求分析与设计初期通常采用文档进行描述。
当编码开始时,这些文档只能起到一些辅助或约束作用,并且随着项目推进,开发人员所编写的代码与文档之间的同步性变得越来越目自,甚至没有关联。
基于模型的软件开发,其核心思想是将模型作为软件开发过程中的主要产物,而将自动模型转换作为软件开发过程中不同阶段产物生成的主要手段。
模型对待开发的目标系统从不同角度进行高层次的抽象描述,从而使业务逻辑与具体软件实现相分离,这极大提高了软件开发的生产力,降低了沟通和变更成本,因此,已逐渐成为软件开发的一种主流方法。
2014年,对象管理组织提出的模型驱动架构 2.0(MDA,ModelDrivenArchitecture),是一种指导软件开发的方法和思想,支持软件设计和模型的可视化、存储和转换。
MDA的核心是模型,因此需要有相应的建模语言来支撑其建模和验证。
统一建模语言(UML,UnifiedModelingLanguage) 由于其具有极好的扩展性和开放性,在软件工程领域取得了较大的成功。
国际系统工程学会和对象管理组织UML2.0的基础上进行重用和面向系统工程的扩展,定义了一种新的系统建模语言标准SysM L。
MDA的核心技术之一是模型转换,是一种将某个模型转换到系统中另一个模型的过程。
模型转换的方法有很多,比如基于规则的模型转换、基于模板的代码生成技术、基于元模型间映射的模型转换、基于模式的模型转换等。
ATLAS转换语言(ATL,ATLASTransforrnationLanguage)是一种基于规则的模型转换语言,既有描述性语言的特征,又含有命令式语言的内容。
2.开发流程参考模型驱动软件工程研究与应用领域的前沿思想和方法,并结合雷达信号处理系统软件开发的实际情况,将基于模型的软件开发流程划分为需求工程、概要设计、详细设计、软件实现以及软件测试五个阶段,其流程顺序及相关产物如图1所示。
ldamodel函数

ldamodel函数如何使用Python中的LDA模型进行主题建模在自然语言处理和机器学习领域,主题建模是一项重要的任务,用于从大量的文本数据中提取出隐含的主题和语义信息。
其中,Latent Dirichlet Allocation(LDA)模型是一种常用的主题建模方法之一。
本文将介绍如何使用Python中的LDA模型进行主题建模,并逐步回答您的问题。
首先,我们需要安装Python中的gensim库,该库提供了LDA模型的实现。
您可以通过以下命令安装gensim库:pip install gensim一旦安装完成,我们就可以开始使用LDA模型进行主题建模了。
第一步:加载数据集在使用LDA模型之前,我们首先需要准备一份文本数据集。
您可以使用任何您感兴趣的文本数据集,如新闻文章、论文摘要、社交媒体评论等等。
在本文中,我们假设您已经有一份名为"corpus.txt"的文本数据集。
接下来,我们可以使用Python中内置的open函数和readlines方法来加载数据集:pythoncorpus_path = "corpus.txt"with open(corpus_path, "r", encoding="utf-8") as f:corpus = [line.strip() for line in f.readlines()]这里,我们使用了一个列表推导式,将读取到的每一行文本去除换行符,并将其添加到一个名为corpus的列表中。
第二步:数据预处理在进行主题建模之前,我们需要对文本数据进行一些预处理工作,如分词、去除停用词、词形还原等。
这些预处理步骤可帮助我们更好地提取主题信息。
下面是数据预处理的一些常见操作,您可以根据自己的需求选择性地进行使用:1. 分词:将文本划分为词语的序列。
在Python中,可以使用nltk库或jieba库等进行中文和英文分词。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
phase domain model
Explained in literature, eg: 1. Johns, David and Martin, Ken. Analog Integrated Circuit Design. Wiley & Sons, 1997. 2. Kundert, Ken. Predicting the Phase Noise of PLL-Based Frequency Synthesizers. , 2005.
Overview
• Brief background on PLLs • Challenges of PLL Simulation • PLL Modeling (solution to the challenges)
Background
• What is a PLL and how does it work? • Brief history of PLL development • PLL applications
PDM - Transfer functions
phase domain model
Phase detector
icp = Kpd *φdiff icp = Kpd * (φref − φ fb )
Controlled oscillator
φout ( s) =
2πKv * vc( s) s
Loop filter
B = 1/ N
Loop Gain = AB
Digital model based on analog
PFD DPFD quantized phase difference LPF DLPF H(s) H(z) discrete time filter VCO DCO quantized frequency step
Cons
- C++ based - learning curve - Slower simulation speed - cost - limited flexibility
Matlab/Simulink
- learning curve
Focus of this talk
Matlab/Simulink
f2
φ 2 = ∫ Sφ ( f )df
f1
rmsNoise = 2 * φ 2
(rad)
Need to determine SΦ(f), the power spectral density of the phase noise
Digital PLL Design Challenges
Nbitspd Nbitslpf
H(s)
Iin Vc R1 C1 C2
H(z)
Existing PLL Simulation Software
Tool
CppSim (developed by M. Perrott at MIT) Verilog-A (full treatment on ) ADS (Agilent’s Advanced Design System) SimPLL (Applied Radio Labs)
‘Analog’ PLL designer not necessarily comfortable with digital design concepts - discrete time - discrete amplitude How many bits? - Nbitspd = ? - Nbitslpf = ? How to build a phase detector with digital output? Quantization noise Overflow/Saturation
Divicp( s )
φ fb ( s ) = φout ( s) / N
PDM – Check Stability
phase domain model
Forward gain (A)
A = Kpd * H ( s ) * 2π * Kv / s
Feedback gain (B)
PLL Qualitative Description
1
Φ
3 4
5
2
Φ
• •
If RF phase drifts ahead of N*ref’s phase • Phase detector ‘err’ signal forces controlled oscillator to slow down If RF phase drifts behind N*ref’s phase • Phase detector ‘err’ signal forces controlled oscillator to speed up
phase domain model
time & amplitude: continuous (analog)
PLL Applications
• • • • Radio Television Telecommunications Computers
Challenges of PLL Simulation
• PLL specifications • PLL design challenges • Existing simulation software for PLLs
A
B
PLL Design Challenges
PLL phase noise measurement Automatically taken care of by Agilent E5052B Signal Source Analyzer How to re-create and analyze in simulation?
Model is versatile - behavioral - functional - floating point - fixed point
PLL Modeling
• Phase domain ADPLL model • Time domain ADPLL model
Build model in Simulink
Modeling and Simulation of an All Digital Phase Locked Loop
Russell Mohn Epoch Microelectronics Inc., Tarrytown, NY
Motivation
• Explain how Matlab/Simulink can be used to model and simulate all-digital PLLs – Construct 2 useful models • phase domain • time domain • Explain how function block specifications can be verified from top level PLL specifications
PLL Design Challenges
A B (B): femtoseconds of resolution - phase noise (A): microseconds of data - settling, lock-up time 9 orders of magnitude in time-scale Simulation time potentially impossibly long
Pros
- Fast simulation speed - Used in SPICE tool environment - display and analysis - integrates with existing PLL ICs - support for fixed point simulation - build behavioral and functional models - display and analysis
Simulate model in Simulink
Analyze results with Matlab
Refine model
Phase Domain Model (PDM)
Assume: 1. Variables represent the phase of the signal 2. Loop is locked 3. Noise is a small signal in a linear system
PLL Qualitative Description
• Function blocks of a phase-locked loop (PLL)
• •
Closed loop system using negative feedback Forces RF = N*ref, and a fixed phase relationship between ‘ref’ and ‘RF’
2000 - 3400 MHz
How to predict if a PLL design will meet specifications? 1. Build and measure costly, time-consuming 2. Simulate performance in frequency and time domains
(build your own PLL model here)
Building blocks - mathematical operations - logic operations - user-defined functions - memory elements - pre-existing library blocks
Typical PLL Specifications