实际工况下磁控饱和电抗器的振动研究
磁饱和可控电抗器特性研究

磁饱和可控电抗器特性研究对磁饱和可控电抗器进行了理论分析,推导了数学模型,建立了仿真模型,在Matlab/Simulink中进行实例仿真,仿真结果表明理论分析的正确性,基于ansys 软件建模分析讨论了两种载荷情况下,对磁饱和可控电抗器的磁阀处铁芯磁场分布的影响。
标签:磁饱和可控电抗器;工作电流;ansys;仿真1 引言电网中的无功平衡对改善全网供电质量至关重要,是电力系统的重要任务之一,因而实现对电网的无功补偿成为是电力系统需要解决的关键技术问题,在高压线路中安装可控电抗器进行动态补偿是协调过电压和无功平衡问题的好方法[1-3]。
在众多的可控电抗器中,磁饱和式可控电抗器(magnetically saturation controlled reactor,MSCR)以其成本低、性能高,能够平滑调节系统的无功功率,提高系统的输电能力和稳定性的优点[4-5],而受到广泛的关注。
本文基于基本磁化曲线建立了MSCR的数学模型,通过仿真分析,探讨了MSCR的工作电流状态,采用ansys分析了MSCR磁阀结构铁心磁场的分布。
2 MSCR结构及数学模型MSCR电抗器的结构原理如图1所示。
其中,绕组匝数N1+ N2= NA=0.5N,抽头匝比为δ =2 N2/N,ua为施加的交流工作电压,i为电抗器的工作电流,RA 为NA匝绕组对应的电阻值。
在这里,采用基本磁化曲线表示B与H的关系。
用简化的两段折线表示硅钢片磁化曲线,设Bs为铁芯对应的饱和磁感应强度,Hs为此时对应的饱和磁场强度。
则可得:设tanα1= Hs /4Bs,tanα0= 1/μ0,B=f (H)曲线可以用下式描述:3 实例及仿真分析根据上述数学过程,对电抗器参数[8]:额定容量SAN= 60.044 MV·A;额定电压UAN=kV;额定频率fN= 50 Hz;绕组电阻RA= 40Ω。
进行仿真,设置在α=0°状态下在0 s 时刻,电抗器由空载突变到满载。
饱和电抗器原理
饱和电抗器原理摘要:以去年首次在中国投运的高压电动机磁控软起动装置为背景,介绍作为软起动装置执行元件的磁饱和电抗器,指明它实质上是一个开关,阐述它的作用、特点和分析方法。
一、引言:饱和电抗器是一种饱和度可控的铁芯电抗器。
50~70年代是磁饱和电抗器在电气自动化领域较盛行的时期[1,2,3]。
它既可以作为放大器件,又可以作为执行元件。
相对于电真空器件,它耐受恶劣环境的优点令人瞩目,相对于交磁放大机系统,它的静止性受到垂青。
当时,国内外关于磁饱和电抗器和磁放大器的著述和相关新铁芯材料的研制报导屡见不鲜。
在我国,在70年代已形成磁放大器产品系列[2]。
70年代以后,以双极型电子器件和SCR为代表的电力电子器件逐渐在电气控制领域占统治地位。
饱和电抗器因惯性较大、功率放大倍数较小等缺点而被排挤,其发展受阻。
但是,饱和电抗器是一种既有长处又有短处的电力器件。
在电阻炉炉温等较慢过程的控制中,以饱和电抗器为功率器件的系列产品仍然在使用。
在如何将它应用在较快过程的控制中,人们的研究和探索仍在继续。
也取得了一些可喜的成果[3]。
我认为,高压电动机软起动是一个能够使饱和电抗器扬长避短发挥重要作用的领域。
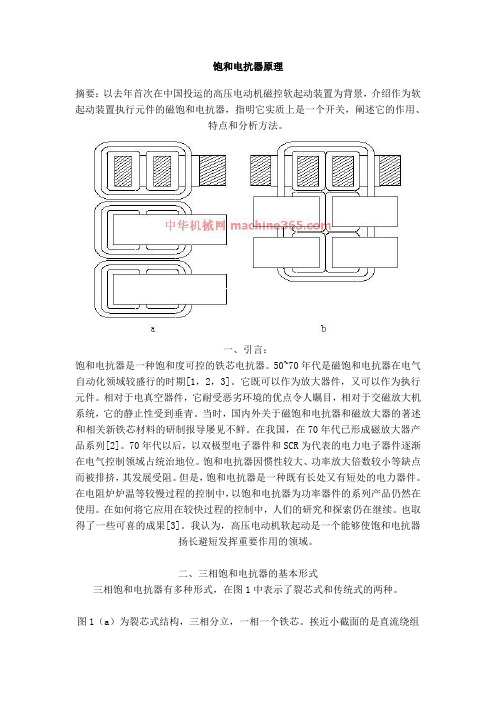
二、三相饱和电抗器的基本形式三相饱和电抗器有多种形式,在图1中表示了裂芯式和传统式的两种。
图1(a)为裂芯式结构,三相分立,一相一个铁芯。
挨近小截面的是直流绕组(共6个)。
绕在直流绕组外面的是交流绕组(共3个)。
两个直流绕组产生的磁通在两个小截面铁芯上形成环路。
而交流绕组产生的磁通通过大截面铁芯形成环路。
图1(b)为传统式。
直流绕组套住6个铁芯和6个交流绕组。
交流绕组每相2个,串连连接。
一相交流电流在2个铁芯上产生2个环路的磁通。
2个环路的时钟方向相同。
图1列出的仅是有代表性的形式。
其它的可行形式还很多,例如图1(a),若将交流绕组挪位,令它套住大截面铁芯,就演绎为另一种可行形式。
所有可行形式的共性是:三、饱和电抗器的分析方法:饱和电抗器不是线性器件。
兹控电抗器的试验研究
变 频 网 www. h na a p n.O c i bi n i C r n
磁控 电抗器 的试验研究
何 绍 洋 汉 湘 张 忠 学 程
(. 东工 业 大学 自动化 学 院电 力工程 系 , 东 广 州 500) 1广 广 106
着 电抗器技术的不断完善 , 对其的试验研究越来越重要 , 将
直接指导磁控电抗器 的优化设计和应用前 景。磁控 电抗器
通过改变铁芯中的磁通量来实现等效 电感 的改变 ,并满足 需要 电抗值可变的高 电压等级电力应 用或 电能质量控制 的 要求 。它的最 大特点是能够利用较小 电压等级 的开关器件
和 这两个控制绕组的影响( 约占每柱铁芯绕组的2 % 左右)可以近似地认为这两个电流的幅值是相同的; , 经过
10 8。后 , 旱 已关断 , T 并通过二极 管 D续流 , 此时再触 发 T, 同样会形成相 同方 向的 f 和 2 则 阢O ) ) 两个闭合 回路电
流。由于4 个绕组的等效电感 L 非常大, 具有很强的恒流 特性. 因而能保证直流电流的稳定。这种结构不论是在电
所有表计或探头均采用 了 1 V的交流 电压互感器和交流 0k 电流互感器 , 以方便 4 0V测量设备 的使用。 0 正是 由于交流 电压和交流电流互感器的存在 , 使得 电抗器支路 电流 中本 应含有 的直流量却无 法反映 出来 , 因此 , 下一节 的试验 在 波形中均不存在直流分量 。
( 2 )
d 』 +t , 盟 / = ( O 一
表路 和 支 1
2的交流电流分量 。显然 , 电流 ) 相 中是不包含直流分量
=( ・ 』 ) f 一( +}・ 号 出
磁饱和可控电抗器数值仿真和实验研究

93/2008收稿日期:2008-04-02作者简介:徐祎(1984-),女,在读硕士研究生,研究方向为电力电子应用。
磁饱和可控电抗器数值仿真和实验研究徐祎,陈建业(清华大学电机工程与应用电子技术系,北京100084)摘 要:磁饱和可控电抗器是一个带铁心的非线性电抗器,有直流和交流绕组。
其工作原理是通过控制直流励磁来改变铁心的饱和程度,从而改变电抗器电感值。
本文研究了在交流励磁和直流励磁共同作用下,可控电抗器的工作原理,并通过有限元仿真软件ANSYS 建模和试验室物理试验进行了验证。
理论分析和试验证明通过对直流励磁的控制,可以有效调节交流电感值。
关键词:磁饱和可控电抗器;直流励磁;数值仿真中图分类号:TM47文献标识码:A文章编号:1671-8410(2008)03-0009-07Numerical and Experimental Analysis of MagneticallyControlled Saturated ReactorXU Yi, CHEN Jian-ye(Department of Electrical Engineering, Tsinghua University, Beijing 100084, China)Abstract: Magnetically controlled saturated reactor composed of DC winding and AC winding is a nonlinear reactor with iron-core. The saturation of iron core is changed by controlling DC excitation field. Consequently the reactor inductance is changed. Under application of AC excitation field and DC bias field, the working principle of controllable reactor is discussed. The feasibility of the principle is verified by ANSYS numerical analysis and physical experiment. Theoretical analysis and experiment results show that AC inductance can be adjusted effectively by DC magnetizing control.Key words: magnetically controlled saturated reactor; DC excitation field; numerical simulation0引言随着现代工业的发展,我国电力系统规模在不断扩大,电压等级也在不断提高,电力系统的稳定、电能质量的控制是大容量电力系统不可忽视的问题。
基于ANSYS的磁饱和式可控电抗器分析
基于ANSYS的磁饱和式可控电抗器分析基于ANSYS的磁饱和式可控电抗器分析引言:磁饱和式可控电抗器是一种能有效控制电网中电力系统的电压和电流波动的装置。
它在电力系统中的应用得到了广泛的关注和研究。
本文将介绍如何利用ANSYS软件进行磁饱和式可控电抗器的分析和仿真。
一、磁饱和式可控电抗器简介磁饱和式可控电抗器是一种在电力系统中用于补偿因电感和电容导致的电力波动的装置。
它由磁饱和型可控电源和串接在其后的电抗器组成。
通过改变可控电源的输出电压,可以调整电抗器的电压和电流,从而控制电网中的电压和电流波动。
二、磁饱和式可控电抗器的工作原理磁饱和式可控电抗器的工作原理基于磁饱和特性。
当电流通过磁饱和电感器时,电感器的磁场会饱和,导致电感器的磁阻增大,从而降低电感器的电感值。
这种现象可以用ANSYS中的磁场分析工具来模拟。
三、ANSYS软件介绍ANSYS是一款强大的工程仿真软件,提供了多种分析工具和模拟功能。
在磁饱和式可控电抗器分析中,可以使用ANSYS中的磁场分析工具进行仿真。
四、磁饱和式可控电抗器的建模和分析1. 创建磁饱和式可控电抗器的几何模型,包括可控电源、串接电抗器以及与电力系统相连的电源线和负载线等。
2. 在ANSYS中导入建模所需的材料参数,如磁导率、电导率等。
3. 运用ANSYS的磁场分析工具对模型进行仿真。
设置合适的分析类型和参数,包括电流密度和电磁力等。
4. 根据仿真结果进行分析和评估,包括电压波动、电流波动等参数的变化。
5. 通过改变可控电源输出电压,观察电抗器的电压和电流的变化,验证磁饱和式可控电抗器的控制效果。
五、仿真结果与分析通过ANSYS的磁场分析工具,可以得到磁饱和式可控电抗器在不同电压输出下的电抗器电压和电流变化情况。
根据仿真结果可以得到以下结论:1. 当可控电源的输出电压提高时,电抗器的电流和电压随之增大,实现了电力系统的电流和电压控制。
2. 可以根据实际需求调整可控电源的输出电压,从而更好地控制电力系统的电流和电压。
直流偏磁下磁控电抗器铁芯矢量电磁振动特性
直流偏磁下磁控电抗器铁芯矢量电磁振动特性贲彤;侯露倩;陈龙;张平;闫荣格【期刊名称】《高电压技术》【年(卷),期】2024(50)5【摘要】在交直流共同激励的工作方式下,磁控电抗器(magnetically controlled reactor,MCR)受直流偏磁的影响,其电磁特性及振动特性会发生极大的变化。
为了精确模拟材料在直流偏磁下的磁化及振动特性,首先基于电工钢片的矢量磁致伸缩逆模型和磁特性测量曲线,采用速度可控粒子群优化(velocity-controlled particle swarm optimization,VCPSO)算法提取并优化模型参数,对磁控电抗器铁芯电工钢片的磁滞和磁致伸缩特性进行分析,并对比实验和仿真曲线,验证磁化特性仿真的准确性;其次,结合矢量磁致伸缩逆模型与MCR有限元模型,模拟MCR铁芯在不同直流偏磁下的矢量电磁振动特性,并分析MCR铁芯位移波形的谐波分量。
最后,搭建MCR振动测试系统,验证模型仿真的准确性。
研究结果可为磁控电抗器铁芯振动的相关研究提供参考。
【总页数】13页(P2270-2281)【作者】贲彤;侯露倩;陈龙;张平;闫荣格【作者单位】三峡大学电气与新能源学院;湖北省微电网工程技术研究中心(三峡大学);省部共建电工装备可靠性与智能化国家重点实验室(河北工业大学)【正文语种】中文【中图分类】TM4【相关文献】1.磁阀型可控电抗器的直流偏磁与谐波特性分析2.直流偏磁下磁饱和电抗器铁心电磁振动分析3.铁芯电抗器直流偏磁对PAPF滤波性能的影响研究4.裂心式磁控电抗器的偏磁特性分析5.直流偏磁下硅钢片磁致伸缩和叠片铁心振动特性的试验研究因版权原因,仅展示原文概要,查看原文内容请购买。
基于磁饱和式可控电抗器无功补偿的研究的开题报告

基于磁饱和式可控电抗器无功补偿的研究的开题报告一、研究背景随着电力系统规模的不断扩大和电力负荷的不断增长,电力系统稳定性和可靠性的问题越来越引起人们的关注。
特别是无功补偿技术,是电力系统中解决电压稳定性和能效问题的重要手段之一。
现有的无功补偿技术主要包括电容器补偿和STATCOM无功补偿等,但存在效率低、体积大、成本高等问题。
因此,如何选取一种合适的无功补偿技术,对电力系统的正常运行和经济效益都具有深远的影响。
二、研究目的本项研究旨在研究基于磁饱和式可控电抗器无功补偿技术,探索其在电力系统中的应用。
具体目的包括:1.研究磁饱和式可控电抗器结构及原理;2.分析磁饱和式可控电抗器在电力系统中的应用;3.基于PSCAD/EMTDC仿真平台,搭建磁饱和式可控电抗器无功补偿系统,并进行仿真实验;4.分析磁饱和式可控电抗器无功补偿系统在电力系统中的性能和经济效益,探讨其在电力系统中的应用前景。
三、研究内容1.磁饱和式可控电抗器结构及原理的研究2.磁饱和式可控电抗器在电力系统中的应用及其优缺点的分析3.基于PSCAD/EMTDC仿真平台,搭建磁饱和式可控电抗器无功补偿系统4.进行仿真实验,分析系统的性能5.探讨磁饱和式可控电抗器无功补偿技术在电力系统中的应用前景四、研究方法本项研究采用文献研究、理论分析和仿真实验相结合的方法。
首先通过文献研究和理论分析,深入探讨磁饱和式可控电抗器结构、原理及其在电力系统中的应用,并制定仿真实验方案。
然后使用PSCAD/EMTDC 仿真平台,建立磁饱和式可控电抗器无功补偿系统,并进行仿真实验,分析系统的性能及经济效益。
最后,对研究结果进行总结,探讨磁饱和式可控电抗器无功补偿技术在电力系统中的应用前景。
五、预期成果1.研究报告:包括研究背景、研究目的、研究内容、研究方法、实验结果和分析以及结论等。
2.仿真实验报告:包括仿真实验方案、实验结果和数据分析等。
3.研究论文:撰写并发表一篇关于磁饱和式可控电抗器无功补偿技术在电力系统中的应用的研究论文。
磁控并联电抗器的应用研究

控 电抗器 。在推 导了磁 控并联 电抗器 (C R 模型 的基础上 ,建立了超高压系统 的仿真模 型,且对 动态无 MS) 功 补偿及 限制甩 负荷 过 电压进行 了仿真 。仿真 结果表 明,在线路传送功率发 生较 大变化时,M S 能够实 CR
时动态补偿无功功率 ,使线路末端 电压基本保持不变 。
关键词 :超高压;磁控 并联 电抗器 ;无功补偿;过电压
中图分类号:T 4 2 文献标识码 :A 文章编号 :10 — 15 2 1) 8 0 0 — 4 M 7 0 7 3 7 (0 10 — 0 5 0
A ppl a i n S ud fM a nei nt ol bl huntRe c o i to t y o g tcCo r la eS c a tr
o e - o t g s c r id o t i v r v l e wa a r e u .S multo e ul h w ha a a i n r s t s o t twhe i e ta s s i n po r t k s g e tc a g s s n l n mi so we e r a h n r a n e ,M CS c o e a e r a— R a c mp ns t e l n
磁 控并联 电抗器的应用研究
‘, { 9 毫 争 嚼 、 j 《 争 曩 、
电工电气 (0 No8 2 1 并联 电抗器 的应用研 究
孟 敬
( 阳工业大学 电气工程 学院,辽宁 沈 阳 1 0 7) 沈 180
摘 要 :为了限制过 电压和补偿线路充 电功率,需要在超高压交流输 电线路装 设高补 偿度的并联可
M E G i g N Jn
(c o lf etc l n ie r g S ey n nvri fTc n l y S ey n 1 8 0 C ia S h o o El r a E gn ei , hn ag U iest ci n yo eh oo , hn a g10 7, hn ) g Ab ta tI re sit vr otg n o e st nl ecagn o rteeia edt sa i c mpnaincnrl be s c:nodror tc e— l e dc mpn ai n h rigp we,h r e i tlh曲 o e st o t l l r t er o v a a o i sn on l 【 o oa
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第42卷第4期2018年7月燕山大学学报Journal of Yanshan UniversityVol. 42 No. 4July 2018文章编号:1007-791X (2018)04~0342~08实际工况下磁控饱和电抗器的振动研究闫荣格I ,2,*,刘怀文I ,2,贲彤I ,2,赵路娜I ’2,周杰I ,2(1.河北工业大学省部共建电工装备可靠性与智能化国家重点实验室,天津300130;2.河北工业大学河北省电磁场与电器可靠性重点实验室,天津300130)摘要:在不同的直流偏磁下,硅钢片会表现出不同的磁化特性以及磁致伸缩特性。
为了研究实际工作状态中 磁控饱和电抗器的振动,对不同直流偏磁下硅钢片的磁化特性和磁致伸缩特性进行测量。
并基于测得的本构 关系,建立磁控饱和电抗器的电磁-机械多场耦合模型。
考虑铁心的电磁力和硅钢片的磁致伸缩效应,进行磁 控饱和电抗器在不同直流偏磁下电磁场和机械场的数值计算,以得到磁通密度、应力和振动的分布情况以及直 流偏磁程度对磁控饱和电抗器振动的影响,进而分析电抗器不同位置的振动情况,为减少磁控饱和电抗器的振 动噪声提供有力的理论依据与计算方法。
关键词:磁控饱和电抗器;磁特性测量;电磁-机械耦合;磁致伸缩;振动分析中图分类号:TM 474文献标识码:ADOI : 10.3969/j. issn. 1007-791X. 2018.04.0090引言磁控饱和电抗器是电网中无功补偿的重要原件,它可以通过控制通入绕组中直流的大小来改变 磁阀的饱和程度,从而改变电抗器的容量,实现平 滑的无功调节[|鄄3]。
与传统的无功补偿装置相比,磁 控饱和电抗器具有适用电压范围广、可靠性高、稳 定性好、占地面积省、维护简单、价格低廉等显著特 点,逐渐成为电网中不可或缺的装置之一[4鄄5]。
然而 磁控饱和电抗器特殊的结构以及交直流共同激励 的工作方式使得其振动噪声相对于其他电抗器更 加剧烈,这严重限制了该电抗器的应用场合和应用 范围。
但近些年有关磁控饱和电抗器的研究主要 集中在损耗、谐波以及工作特性等方面,与振动噪 声有关的研究还鲜有报道[6鄄8]。
而基于测得的实际 工况下硅钢片的参数来计算磁控饱和电抗器振动 噪声的分析在国内外文献中更没有涉及。
铁心的电磁力和硅钢片的磁致伸缩效应是造 成电抗器振动的两个重要因素,部分学者分别考 虑铁心的电磁力和硅钢片磁致伸缩效应对串联式铁心电抗器和高压可控饱和电抗器的振动进行了计算,得到了硅钢片的磁致伸缩效应是造成电抗 器振动主要原因的结论[9—10]。
而电磁力和磁致伸 缩力与电抗器组成材料的材料特性又有着密不可 分的关系,国外一些学者对无取向硅钢片的二维 磁化特性进行了测量,并将测量数据应用于电机 的电磁振动分析,为电机减振提供了有力的数据 支撑[11]。
国内一些学者对不同直流偏磁下硅钢片 的磁致伸缩特性进行了研究,完成了不同直流偏 磁对变压器的振动影响的实验分析[12]。
日本部分 学者研究了旋转磁场和交变磁场下硅钢片的磁致 伸缩特性,得到了不同机械应力对磁致伸缩效应 的影响[13—14]。
然而在国内外文献中,同时考虑实际工况下硅钢片的磁化特性和磁致伸缩特性对不 同直流偏磁下磁控饱和电抗器振动噪声问题的研 究还未涉及,对磁控饱和电抗器不同位置的振动 情况也没有进行详细的讨论。
本文采用德国BROCKHAUS 公司的测量系统 测试了样机硅钢片在不同直流偏磁与工作电压叠 加下的磁化曲线和磁致伸缩曲线,并根据电磁场收稿日期:2017-04-21责任编辑:孙峰基金项目:国家自然科学基金资助项目(51237005 ,51777054);河北省博士研究生创新资助项目(C X Z Z B S 2017028)作者简介:*闫荣格(1969-),女,河北石家庄人,博士,教授,博士生导师,主要研究方向为工程电磁场与磁技术,£以&丨1:>^111^@1^^^.第4期闫荣格等实际工况下磁控饱和电抗器的振动研究343和机械场的相关理论以及有限元计算方法,建立了磁控饱和电抗器的电磁-机械多场耦合模型,对不同直流偏磁下磁控饱和电抗器的振动进行了研究。
得到了磁控饱和电抗器在不同直流偏磁下的磁通密度和应力分布以及磁控饱和电抗器不同位置的振动情况,为减少磁控饱和电抗器的振动噪声提供有力的理论依据与计算方法。
1娃钢片磁特性测量在对磁控饱和电抗器的振动进行计算时,材料参数对计算结果的准确度有着直接影响。
对应用于电抗器的硅钢片而言,硅钢片在不同的工作状态下会表现出不同的磁特性,所以为了保证计算结果的准确性,必须准确测量所研究电抗器硅钢片在实际工作状态下的磁化特性与磁致伸缩特性。
本文所研究的磁控饱和电抗器采用的是武钢生产的无取向硅钢片,使用德国BROCKHAUS公司的测量系统对单片硅钢片进行材料测量,分别测量了 220 V工作电压以及2 A和4 A直流偏磁分别与其叠加下硅钢片的磁化曲线()和磁致伸缩曲线(H-A),分别如图1与图2所示。
在仿真计算的过程中将测量得到的磁化曲线和磁致伸缩曲线通过插值的方法运用到所对应的模型中,从而提高磁控饱和电抗器振动计算的准确度。
Fig. 1Magnetization curves of silicon steelunder different DC bias通过对比不同直流偏磁与220 V工作电压叠加下硅钢片的磁化曲线和磁致伸缩曲线可知,磁化曲线随着直流偏磁的增大而向右移动,并且当磁通密度达到1.6T左右的时候,各条磁化曲线重合且不再继续快速增大,也就是说,当磁通密度达到1.6T的时候,硅钢片已经达到饱和状态。
而磁致伸缩曲线则随着直流偏磁的增大而略微下移,即硅钢片的磁致伸缩随着直流偏磁的增大而略微减小。
由此可见,当在激励中加入直流偏磁后,硅钢片的磁化特性和磁致伸缩特性均发生了一定的改变,因此,本文将采用不同激励下硅钢片的磁化特性与磁致伸缩特性对磁控饱和电抗器在不同直流偏磁状态下的振动进行仿真计算,进而使计算结果更加贴近实际。
Fig. 2 Magnetostriction curves of silicon steelunder different DC bias2电抗器铁心的电磁-机械耦合分析磁控饱和电抗器在正常工作时不受外力,只有电磁力与磁致伸缩力作用。
因此,磁控饱和电抗器的总能量包括应变能、电磁能、电流位能、磁-机械耦合能和磁场边界上的位能,其能量泛函可表示为着B1=乙(乙滓•d着)d赘+乙(乙H •d B)d赘-赘10赘20A乙(乙J •d A)d赘+乙(滓1 •d H)d赘+赘20赘1Aj(J(H x n)d A)d祝,(1)厂20式中,赘i表示机械场计算域,赘2表示磁场计算域,祝2表示磁场边界。
J为电流密度矢量,滓T为电抗器铁心因施加磁场所产生的磁致伸缩应力,H和B分别为磁场强度和磁通密度,其关系可以由测量的磁化曲线得到。
滓和着分别是硅钢片的应力张量与应变张量。
d是电抗器铁心硅钢片的磁致344燕山大学学报2018伸缩系数,可以由测量得到的磁致伸缩与磁场强 度之间的关系取得。
由狄利克雷边界条件可知电抗器在正常工作 时磁场边界上的位能为零,即A乙(乙(H x n )dA ) dr = 0。
(2)祝2 0结合式(1)和(2),应用能量变分原理,将求 解转化为多元函数求极值的问题,对磁矢位A 和 位移矢量u 求极值,得:赘2坠A'i (jH -d B )d 赘-乙J 2赘2坠A坠A ,,d 赘+乙(滓T .dH )d 赘=赘i(淄Bx )赘2坠B 2坠B 2+ (哄)J2坠A 坠A ,dxdy +乙 E (d 淄 着 x + d 淄 B y 着 y )dxdy , (3)赘i式中,j = x ,y ,i =1,2,…,m ,m 是待求的磁矢位数 量,Ay 表示电磁场赘2中j 方向第i 点的磁矢位,淄 为磁导率,E 为材料的杨氏模量。
坠I =坠d u ■■ d u ■■J l J l 赘 1 0着(乙(乙滓• d 着)d 赘)坠u(乙(滓T .dH )d 赘)赘1E (1 -琢f _ ds x 坠着x赘』(1 +琢)(1 -2琢)12着x 坠+2琢'坠+赘1坠s 坠s 坠酌、2琢Sx 坠 x + 2琢s y 坠 y + (1 -琢)7x y 坠 x y I +d u y d u i V x y 坠 U i V 0Jl Jl JlE (d 淄Bxs x + d 淄Bys y) dxd y ,(4)式中,j = x ,y ,l = 1,2,…n ,n 是待求的位移矢量数 量。
&表示机械场赘1中j 方向第l 点的位移,为 材料在xy 面上的剪应变,琢为泊松比。
根据多元函数求极值的条件,联立式(3)和 ⑷得dI d A ji 坠1duji移died A J0( l工,2,…"),通过求解上式可得节点磁矢位Aji 和振动位移Up3电抗器振动仿真模型的建立本文以一台220 V 、4.4 kvar 的单相他励式磁控饱和电抗器作为研究对象,建立了该电抗器的电磁-机械多场耦合模型。
磁控饱和电抗器的铁 心结构与普通电抗器的不同之处在于磁阀的存 在,磁阀即两个中心铁心柱中间变细的部分,磁控 饱和电抗器的容量是由磁阀的饱和程度所决定。
为了提高求解精度和求解速度,对磁阀部分进行 细化剖分,剖分后的求解模型如图3所示。
图3磁阀网格剖分图Fig. 3Mesh of magnetic-valves利用有限元方法对图3所示的求解模型进行 求解,考虑电磁力和磁致伸缩力的作用,在瞬态求解器下计算220 V 、50 H z 工作电压以及2 A 和4 A 控制电流与其叠加下磁控饱和电抗器的振动情 况,为了保证计算的准确性与快速性,将求解时间 步长设置为0.000 1 s ,计算时间设置为3个周期。
图4是磁控饱和电抗器铁心在不同的控制电 流下同一时刻的磁通密度分布图。
由图4可知, 磁通密度分布主要集中在磁阀处和铁轭拐角处, 并且随着控制电流的增大,铁心的磁通密度不断 增大,尤其是磁阀处的增大尤为明显。
当控制电 流分别为0 A 、2 A 、4 A 时,磁控饱和电抗器铁心的 最大磁通密度分别可以达到1. 26 T 、1.48 T 和1. 63 T 。
由图1可知,当控制电流达到4 A 时,磁阀已经处于饱和状态。
造成磁控饱和电抗器振动的主要原因是磁阀 两边气隙的电磁力和硅钢片的磁致伸缩效应。
为 了研究电磁力与磁致伸缩力对电抗器振动的影 响,本文选取磁阀、铁心柱、铁轭转角处和铁轭处作为重点研究对象来分析磁控饱和电抗器的振动,分别记为A 、B 、C 、D ,具体位置如图4(c )所示。
第4期闫荣格等实际工况下磁控饱和电抗器的振动研究345(b)/D C=2A▼ 1.17X10'4(物C=4A图4不同控制电流下磁通密度分布Fig. 4 The magnetic flux density amplitude distributionunder different control currents图5给出了磁控饱和电抗器在不同控制电流 下同一时刻的铁心应力模分布图。