TCRT5000_红外反射式光电传感器_反射型光电开关_光电对管_寻迹小车专用.doc
TCRT5000_红外反射式光电传感器_反射型光电开关_光电对管_寻迹小车专用
光电传感器选型要素有哪些?①结构类型:放大器分离型、放大器内藏型等②检测方式:对射型、回归反射型、扩散反射型等③工作电源:直流、交流、交直流通用(E3JK/E3JM,E3G系列)④检测距离:详见各产品样本资料⑤检测物体:外形、大小、颜色⑥控制输出:晶体管输出、继电器输出等⑦连接方式:导线引出型、接插件式⑧其它功能:延时功能、计数器功能等⑨附件:狭缝、反射板、安装配件等驱动方式由于自激蜂鸣器是直流电压驱动的,不需要利用交流信号进行驱动,只需对驱动口输出驱动电平并通过三极管放大驱动电流就能使蜂鸣器发出声音,很简单,这里就不对自激蜂鸣器进行说明了。
这里只对必须用1/2duty 的方波信号进行驱动的他激蜂鸣器进行说明。
单片机驱动他激蜂鸣器的方式有两种:一种是PWM 输出口直接驱动,另一种是利用I/O 定时翻转电平产生驱动波形对蜂鸣器进行驱动。
PWM 输出口直接驱动是利用PWM 输出口本身可以输出一定的方波来直接驱动蜂鸣器。
在单片机的软件设置中有几个系统寄存器是用来设置PWM 口的输出的,可以设置占空比、周期等等,通过设置这些寄存器产生符合蜂鸣器要求的频率的波形之后,只要打开PWM 输出,PWM 输出口就能输出该频率的方波,这个时候利用这个波形就可以驱动蜂鸣器了。
比如频率为2000Hz 的蜂鸣器的驱动,可以知道周期为500μs,这样只需要把PWM 的周期设置为500μs,占空比电平设置为250μs,就能产生一个频率为2000Hz 的方波,通过这个方波再利用三极管就可以去驱动这个蜂鸣器了。
而利用I/O 定时翻转电平来产生驱动波形的方式会比较麻烦一点,必须利用定时器来做定时,通过定时翻转电平产生符合蜂鸣器要求的频率的波形,这个波形就可以用来驱动蜂鸣器了。
比如为2500Hz 的蜂鸣器的驱动,可以知道周期为400μs,这样只需要驱动蜂鸣器的I/O 口每200μs 翻转一次电平就可以产生一个频率为2500Hz,占空比为1/2duty 的方波,再通过三极管放大就可以驱动这个蜂鸣器了。
TCRT5000 红外反射式光电传感器 反射型光电开关 光电对管 寻迹小车专用
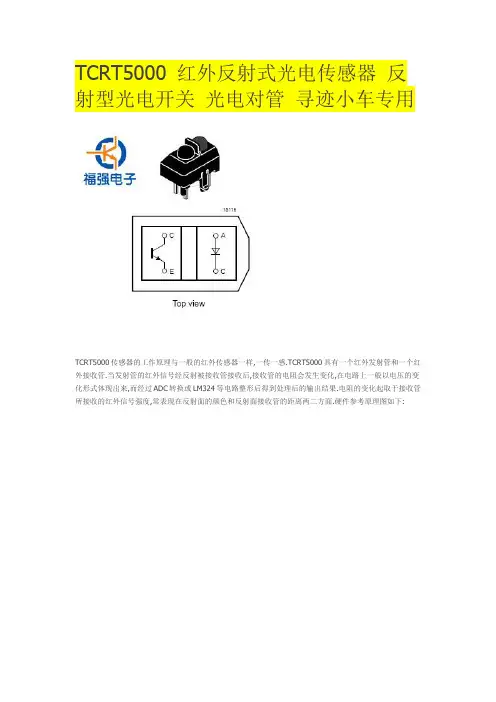
TCRT5000 红外反射式光电传感器反射型光电开关光电对管寻迹小车专用
TCRT5000传感器的工作原理与一般的红外传感器一样,一传一感.TCRT5000具有一个红外发射管和一个红外接收管.当发射管的红外信号经反射被接收管接收后,接收管的电阻会发生变化,在电路上一般以电压的变化形式体现出来,而经过ADC转换或LM324等电路整形后得到处理后的输出结果.电阻的变化起取于接收管所接收的红外信号强度,常表现在反射面的颜色和反射面接收管的距离两二方面.硬件参考原理图如下:
以上资料为福强电子整理所得,仅供参考!。
TCRT5000红外反射式开关传感器寻黑白线循迹模块避障小车寻迹
TCRT5000红外反射式开关传感器寻黑白线循迹模块避障小车寻迹TCRT5000一体化光电传感器,具有抗干扰性强,使用方便等优点,是寻迹智能小车必备,检测距离10MM,多路可以适应多种黑线轨道,输入电压5V,黑线输出0V,白线输出5V,数字量输出,+:接直流DC5V正极-:接直流DC5V负极S:信号输出端,光敏三极管饱和,此时模块的输出端为高电平,指示二极管被点亮。
概述TCRT5000光电传感器模块是基于TCRT5000红外光电传感器设计的一款红外反射式光电开关。
传感器采用高发射功率红外光电二极管和高灵敏度光电晶体管组成,输出信号经施密特电路整形,稳定可靠。
应用场合:1.电度表脉冲数据采样2.传真机碎纸机纸张检测3.障碍检测4.黑白线检测基本参数:1.外形尺寸:长32mm~37 mm;宽7.5mm;厚2mm2.工作电压:DC 3V~5.5V,推荐工作电压为5V3.检测距离:1mm~8mm适用,焦点距离为2.5mm模块原理和应用电路原理图:图 1 TCRT5000传感器模块电路原理图传感器的红外发射二极管不断发射红外线,当发射出的红外线没有被反射回来或被反射回来但强度不够大时,光敏三极管一直处于关断状态,此时模块的输出端为低电平,指示二极管一直处于熄灭状态;被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,光敏三极管饱和,此时模块的输出端为高电平,指示二极管被点亮。
驱动芯片:L298N双H桥驱动芯片2.驱动部分端子供电范围Vs:+5V~+35V;如需要板内输出5V,则供电范围Vs:+7V~+35V3.驱动部分峰值电流Io:2A4.逻辑部分端子供电范围Vss:+5V~+7V(可板内取电+5V)5.逻辑部分工作电流范围:0~36mA6.控制信号输入电压范围:低电平:-0.3V≤Vin≤1.5V高电平:2.3V≤Vin≤Vss7.最大功耗:20W(温度T=75℃时)8.存储温度:-25℃~+130℃9.驱动板尺寸:55mm*49mm*33mm(带固定铜柱和散热片高度)10.驱动板重量:33g11.其他扩展:控制方向指示灯、逻辑部分板内取电接口。
(完整版)TCRT5000详细中文资料和问题示例
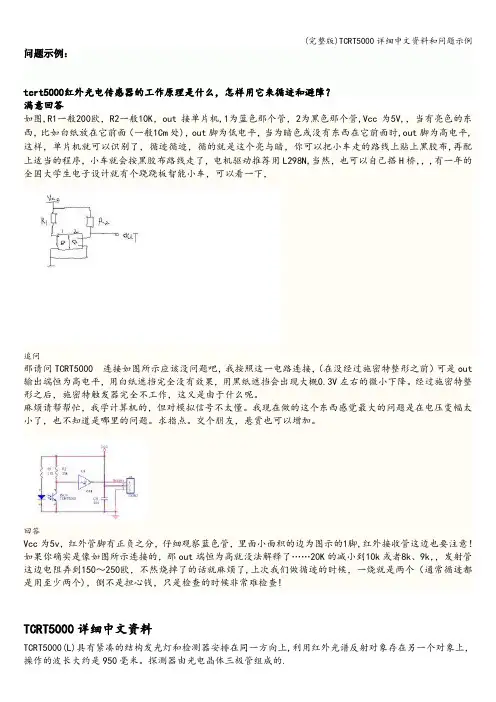
问题示例:tcrt5000红外光电传感器的工作原理是什么,怎样用它来循迹和避障?满意回答如图,R1一般200欧,R2一般10K,out接单片机,1为蓝色那个管,2为黑色那个管,Vcc为5V,,当有亮色的东西,比如白纸放在它前面(一般1Cm处),out脚为低电平,当为暗色或没有东西在它前面时,out脚为高电平,这样,单片机就可以识别了,循迹循迹,循的就是这个亮与暗,你可以把小车走的路线上贴上黑胶布,再配上适当的程序,小车就会按黑胶布路线走了,电机驱动推荐用L298N,当然,也可以自己搭H桥,,,有一年的全国大学生电子设计就有个跷跷板智能小车,可以看一下,追问那请问TCRT5000 连接如图所示应该没问题吧,我按照这一电路连接,(在没经过施密特整形之前)可是out 输出端恒为高电平,用白纸遮挡完全没有效果,用黑纸遮挡会出现大概0.3V左右的微小下降。
经过施密特整形之后,施密特触发器完全不工作,这又是由于什么呢。
麻烦请帮帮忙,我学计算机的,但对模拟信号不太懂。
我现在做的这个东西感觉最大的问题是在电压变幅太小了,也不知道是哪里的问题。
求指点。
交个朋友,悬赏也可以增加。
回答Vcc为5v,红外管脚有正负之分,仔细观察蓝色管,里面小面积的边为图示的1脚,红外接收管这边也要注意!如果你确实是像如图所示连接的,那out端恒为高就没法解释了……20K的减小到10k或者8k、9k,,发射管这边电阻弄到150~250欧,不然烧掉了的话就麻烦了,上次我们做循迹的时候,一烧就是两个(通常循迹都是用至少两个),倒不是担心钱,只是检查的时候非常难检查!TCRT5000详细中文资料TCRT5000(L)具有紧凑的结构发光灯和检测器安排在同一方向上,利用红外光谱反射对象存在另一个对象上,操作的波长大约是950毫米。
探测器由光电晶体三极管组成的.应用:转轴编码器的位置检测器.反光材料检测,如纸张,IBM公司卡,磁带等。
录像机里有限位开关的机械运动通用—无论在什么空间有限的地方。
智能寻迹小车
智能循迹小车本文论述了基于单片机的智能循迹小车的控制过程。
智能循迹是基于自动引导机器人系统,用以实现小车自动识别路线,以及选择正确的路线。
智能循迹小车是一个运用传感器、单片机、电机驱动及自动控制等技术来实现按照预先设定的模式下,不受人为管理时能够自动实现循迹导航的高新科技。
该技术已经应用于无人驾驶机动车,无人工厂,仓库,服务机器人等多种领域。
本设计采用STC89C52单片机作为小车的控制核心;采用TCRT5000红外反射式开关传感器作为小车的循迹模块来识别白色路面中央的黑色引导线,采集信号并将信号转换为能被单片机识别的数字信号;采用驱动芯片L298N构成双H桥控制直流电机,其中软件系统采用C程序,本设计的电路结构简单,容易实现,可靠性高。
关键词:智能小车STC89C52单片机L298N 智能循迹目录一、绪论 (1)1.1 智能循迹小车概述 (1)1.1.1 循迹小车的发展历程回顾 (1)1.1.2 智能循迹分类 (2)1.1.3 智能循迹小车的应用 (3)1.2 智能循迹小车研究中的关键技术 (4)二、智能循迹小车总体设计方案 (5)2.1 整体设计方案 (5)2.1.1 系统设计步骤 (5)2.1.2 系统基本组成 (5)2.2 整体控制方案确定 (6)三、系统的硬件设计 (8)3.1 单片机电路的设计 (8)3.1.1 单片机的功能特性描述 (8)3.1.2 晶振电路 (9)3.1.3 复位电路 (9)3.2 光电传感器模块 (10)3.2.1 传感器分布 (11)3.3 电机驱动电路 (12)3.3.1 L298N引脚结构 (13)3.3.2 电机驱动原理 (13)3.3.3小车运动逻辑 (15)四、系统的软件设计 (16)4.1 软件设计的流程 (16)4.2 本系统的编译器 (17)五、系统的总体调试 (22)5.1 硬件的测试 (22)5.2 系统的软件调试 (22)参考文献 (24)一、绪论进入二十一世纪,随着计算机技术和科学技术的不断进步,机器人技术较以往已经有了突飞猛进的提高,智能循迹小车即带有视觉和触觉的小车就是其中的典型代表。
器件——TCRT5000参数与实际设计应用
器件——TCRT5000参数与实际设计应⽤
TCRT5000是⼀种反射式光学传感器,它包括⼀个红外发射器和⼀个3.5mm引线封装的光电晶体管,可阻挡可见光。
还具有1mA 典型被测输出电流,2.5mm峰值⼯作距离,可应⽤传感与仪表,⼯业等⾏业。
我们知道,这是其实物图,但是我们要知道其原理,请看下⾯这张图
原理
我们知道,反射传感器包括了⼀个红外发射器和光电探测器,彼此相邻。
当⼀个物体位于传感路径中的发射器和探测器之间时,其会中断或打断发射器的光束,然后物体会反射发射器所发出的光束,使得探测器能够接收到,这样,探测器能够得到物体距离探测器的距离。
产品参数
距离参数
CTR:电流传输⽐,Iout/Iin
基本特性
电路图纸
⼯作原理描述:
在⼯作时,TCRT5000传感器的红外发射⼆极管不断发射红外线,当发射的红外线没有被反射回来或者反射回的强度不够⼤时,红外接收管⼀直处于关闭状态,此时5脚的电压低于6脚的电压,输出DO为⾼电平,LED1为熄灭状态;当红外反射强度⾜够且被物体阻挡被返回时,被接收器接收到时,5脚的电压⼤于6脚的电压,输出DO为低电平,LED1为点亮状态。
LED3灯常亮,是为了⽤于照明,减少外部光线的⼲扰,提⾼巡线准确度。
LED2作为电源指⽰灯,⽤来判断电源是否出现问题。
接线⽅式:
VCC:接电源
GND:接负极
DO:TTL开关信号输出,与其他器件I/O⼝连接
AO:模拟信号输出,通常情况下⽆需连接。
光电传感器TCRT5000(L)说明手册_电路实验
Reflective Optical Sensor with Transistor OutputDescriptionThe TCRT5000(L) has a compact construction wherethe emitting-light source and the detector are arrangedin the same direction to sense the presence of an ob-ject by using the reflective IR beam from the object.The operating wavelength is 950 mm. The detectorconsists of a phototransistor.ApplicationsD Position sensor for shaft encoderD Detection of reflective material such as paper,IBM cards, magnetic tapes etc.D Limit switch for mechanical motions in VCRD General purpose – wherever the space is limitedUnit V mA A mW °CUnit V V mA mW °CElectrical Characteristics Input (Emitter)ParameterForward voltageJunction capacitanceOutput (Detector)ParameterCollector emitter voltageEmitter collector voltageCollector dark currentSensorParameterCollector currentCollector emittersaturation voltage100.0 Figure 6. Collector Current vs. Forward Current=50mA0.20.40.60.81.01.2096 11766I – R e l a t i v e C o l l e c t o r C u r r e n tC r e l Figure 9. Relative Collector vs. DistanceTCRT5000(L)Vishay Semiconductors 6 (8)Rev. A4, 03–Jul–00Document Number 83760Dimensions of TCRT5000 in mm96 12073TCRT5000(L)Vishay Semiconductors7 (8)Document Number 83760Rev. A4, 03–Jul–00Dimensions of TCRT5000L in mm95 11267TCRT5000(L)Vishay Semiconductors 8 (8)Rev. A4, 03–Jul–00Document Number 83760Ozone Depleting Substances Policy StatementIt is the policy of Vishay Semiconductor GmbH to1.Meet all present and future national and international statutory requirements.2.Regularly and continuously improve the performance of our products, processes, distribution and operating systems with respect to their impact on the health and safety of our employees and the public, as well as their impact on the environment.It is particular concern to control or eliminate releases of those substances into the atmosphere which are known as ozone depleting substances (ODSs).The Montreal Protocol (1987) and its London Amendments (1990) intend to severely restrict the use of ODSs and forbid their use within the next ten years. Various national and international initiatives are pressing for an earlier ban on these substances.Vishay Semiconductor GmbH has been able to use its policy of continuous improvements to eliminate the use of ODSs listed in the following documents.1.Annex A, B and list of transitional substances of the Montreal Protocol and the London Amendments respectively2.Class I and II ozone depleting substances in the Clean Air Act Amendments of 1990 by the Environmental Protection Agency (EPA) in the USA3.Council Decision 88/540/EEC and 91/690/EEC Annex A, B and C (transitional substances) respectively.Vishay Semiconductor GmbH can certify that our semiconductors are not manufactured with ozone depleting substances and do not contain such substances.We reserve the right to make changes to improve technical design and may do so without further notice.Parameters can vary in different applications. All operating parameters must be validated for each customer application by the customer. Should the buyer use Vishay Semiconductors products for any unintended or unauthorized application, the buyer shall indemnify Vishay Semiconductors against all claims, costs, damages, and expenses, arising out of, directly or indirectly, any claim of personal damage, injury or death associated with such unintended or unauthorized use.Vishay Semiconductor GmbH, P .O.B. 3535, D-74025 Heilbronn, Germany Telephone: 49 (0)7131 67 2831, Fax number: 49 (0)7131 67 2423This datasheet has been download from: Datasheets for electronics components.。
基于蓝牙监控的智能循迹运输小车设计
基于蓝牙监控的智能循迹运输小车设计朱林海,洪晓芳,高芳芳,韩莉娜,刘茜(山东劳动职业技术学院电气及自动化系,山东济南250000)摘要:以STC15F2K60S2单片机为核心器件,设计了一种基于蓝牙监控的智能循迹运输小车。
小车从起点发车,5路光电传感器TCRT5000检测跑道位置信息并传送给单片机。
单片机根据循迹算法发送PWM波,通过电机驱动芯片L298N控制电机的转动速度和方向,使小车循迹行进。
到达终点,小车停止,物料检测模块监测装货过程,装货完毕,小车返回起点进行卸货%蓝牙模块将小车运行数据传送至手机端,通过手机APP对小车行进状态进行监控。
测试结果表明,小车能够快速、稳定的完成循迹、运输、报警功能,实现了小车的预期设计功能%关键词:运输小车;循迹算法;蓝牙监控;传感器;单片机中图分类号:TN273 文献标识码:A文章编号#1000-0682(2021)03-0126-05Design of intelligent tracking transport car based on Bluetooth monitoringZHU Linhai,HONG Xiofog,GAO Fogfog,HAN Lina,LI Qian(Department O Electricaland Automatiop,Shandong Labor Vocationaland TecCnical College, Shandong Jinan250000,China#Abstracr:The system chose STC15F2K60S2single-chip microcomputer as the core device,an in-1X10—1tracking Wospoa car based on Bluetooth101X)/10p designed.The car depots from the staring point.The runway position information is detected by5photoelectmc sensorr TCRT5000and then taansmi t ed tothesingee-chip micaocomputea.ThePWM waveissentbythesingee-chip micaocomputea accoadnngtothetaacknngaegoanthm.Themotoadanvechnp L298N ns used tocontaoetheaotatnon speed and direction of the motor so as to make the car track.Car stops after reaching the end.After loading,the car returns to the starting point for unloading-The running data of the car is transmitted to the mobile phone by the Bluetooth module,and the running status of the car is monitored by the mobile phone app.The test results show that t he car has completed the functions ot tracking,transpo/ation,alarm.FinOly,we realiae the expected design functions of the car.Keywonls:WospoO car;tracking OgoOthm;Bluetooth monitoOng;sensor;single-chip microcompuW0引言智能运输小车适用于环境恶劣,重复性和劳动强度大的场合,在工业生产线、仓库存储、快递、航空航天等领域广泛应用U"-。
循迹避障小车毕业设计
5系统抗干扰设计………………………………………………………………33
6技术经济分析…………………………………………………………………35
7结论……………………………………………………………………………36
致谢……………………………………………………………………………37
1 方案设计与论证
1.1 整体硬件设计方案
根据设计任务的要求,确定如下方案:通过高发射功率红外光电二极管和高灵敏度光电晶体管组成的传感器循迹模块判断黑线路径,通过超声波模块测量出障碍物和小车之间的距离,并将测量数据传送至单片机进行处理,然后由单片机通过IO口控制L298N驱动模块改变两个直流电机的工作状态,实现对小车的控制。
6)液晶显示模块:采用HG12232带中文字库的液晶显示屏显示小车运行状态。主要显示小车运行时间,实时运行状况。该液晶屏可以并行传输,也可以串行传输。在这个设计中,考虑到ATMega128有足够的引脚,故采用并行传输。
7)DS1302时钟模块:DS1302是美国DALLAS公司推出的一种高性能、低功耗、带RAM的实时时钟电路,它可以对年、月、日、周日、时、分、秒进行计时,具有闰年补偿功能,工作电压为2.5V~5.5V。采用DS1302对小车运行时间计时。
参考文献………………………………………………………………………38
附录A译文……………………………………………………………………39附录B外文文献………………………………………………………………43
附录C设计程序………………………………………………………………49
0 前言
人们一直都想拥有一种能够自动驾驶,并且能够适应各种复杂路面情况和沿着指定道路(轨迹)行驶的车辆。多年来,随着企业生产技术不断提髙,自动化技术不断加深,电子智能控制技术在汽车工业上的应用越来越普遍,人们的这一梦想终于有望得到实现。现在,世界上许多国家都在对智能车辆进行研究和设计。
TCRT500(红外对管)
Reflective Optical Sensor with Transistor OutputDescriptionThe TCRT5000(L) has a compact construction wherethe emitting-light source and the detector are arrangedin the same direction to sense the presence of an ob-ject by using the reflective IR beam from the object.The operating wavelength is 950 mm. The detectorconsists of a phototransistor.ApplicationsD Position sensor for shaft encoderD Detection of reflective material such as paper,IBM cards, magnetic tapes etc.D Limit switch for mechanical motions in VCRD General purpose – wherever the space is limitedUnit V mA A mW °CUnit V V mA mW °CElectrical Characteristics Input (Emitter)ParameterForward voltageJunction capacitanceOutput (Detector)ParameterCollector emitter voltageEmitter collector voltageCollector dark currentSensorParameterCollector currentCollector emittersaturation voltage100.0 Figure 6. Collector Current vs. Forward Current=50mA0.20.40.60.81.01.2096 11766I – R e l a t i v e C o l l e c t o r C u r r e n tC r e l Figure 9. Relative Collector vs. DistanceTCRT5000(L)Vishay Semiconductors 6 (8)Rev. A4, 03–Jul–00Document Number 83760Dimensions of TCRT5000 in mm96 12073TCRT5000(L)Vishay Semiconductors7 (8)Document Number 83760Rev. A4, 03–Jul–00Dimensions of TCRT5000L in mm95 11267TCRT5000(L)Vishay Semiconductors 8 (8)Rev. A4, 03–Jul–00Document Number 83760Ozone Depleting Substances Policy StatementIt is the policy of Vishay Semiconductor GmbH to1.Meet all present and future national and international statutory requirements.2.Regularly and continuously improve the performance of our products, processes, distribution and operating systems with respect to their impact on the health and safety of our employees and the public, as well as their impact on the environment.It is particular concern to control or eliminate releases of those substances into the atmosphere which are known as ozone depleting substances (ODSs).The Montreal Protocol (1987) and its London Amendments (1990) intend to severely restrict the use of ODSs and forbid their use within the next ten years. Various national and international initiatives are pressing for an earlier ban on these substances.Vishay Semiconductor GmbH has been able to use its policy of continuous improvements to eliminate the use of ODSs listed in the following documents.1.Annex A, B and list of transitional substances of the Montreal Protocol and the London Amendments respectively2.Class I and II ozone depleting substances in the Clean Air Act Amendments of 1990 by the Environmental Protection Agency (EPA) in the USA3.Council Decision 88/540/EEC and 91/690/EEC Annex A, B and C (transitional substances) respectively.Vishay Semiconductor GmbH can certify that our semiconductors are not manufactured with ozone depleting substances and do not contain such substances.We reserve the right to make changes to improve technical design and may do so without further notice.Parameters can vary in different applications. All operating parameters must be validated for each customer application by the customer. Should the buyer use Vishay Semiconductors products for any unintended or unauthorized application, the buyer shall indemnify Vishay Semiconductors against all claims, costs, damages, and expenses, arising out of, directly or indirectly, any claim of personal damage, injury or death associated with such unintended or unauthorized use.Vishay Semiconductor GmbH, P .O.B. 3535, D-74025 Heilbronn, Germany Telephone: 49 (0)7131 67 2831, Fax number: 49 (0)7131 67 2423This datasheet has been download from: Datasheets for electronics components.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
【转载】
TCRT5000 红外反射式光电传感器反射型光电开关光电对管寻迹小车专用
TCRT5000传感器的工作原理与一般的红外传感器一样,一传一感.TCRT5000具有一个红外发射管和一个红外接收管.当发射管的红外信号经反射被接收管接收后,接收管的电阻会发生变化,在电路上一般以电压的变化形式体现出来,而经过ADC转换或LM324等电路整形后得到处理后的输出结果.电阻的变化起取于接收管所接收的红外信号强度,常表现在反射面的颜色和反射面接收管的距离两二方面.硬件参考原理图如下:
以上资料为福强电子整理所得,仅供参考!。