车载卫星天线系统
车载卫星天线快速找星控制系统的研究与设计

具 备 串行 口、 D输入 、 WM 输 出、 A P 大容量 f s l h等多 a
个 优 点 。非 常适 合 与信 标 机 、 P G S和 电子 罗 盘 的连 接 。T 1C A 02根 据 电子罗 盘和 G S信号 , S C 2 5 6S P 计算 出天 线 的方位 和俯 仰角 ,实现 天 线 的快 速寻 星 , 然 后 通过信标 机 实现天 线 的精 确 定位 。
方 法 与软 件 算 法 的 实现 过 程 。 经检 测证 明该 系统 能 快 速 、 确 的 寻找 到 卫 星 。 准
关键词: 栽卫星天线; P ; 车 G S 电子 罗盘 ; 服 系统 伺 中图 分 类号 :P 7 3 T 2 3. 2 文 献 标识 码 : A 文 章 编号 :6 1 39 (0 2 0 — 0 3 0 17 — 6 9 2 1 )3程分 为 两个 部分 , 一 第 部分为 快速 找星 部分 。 即通 过 G S和电子 罗盘快 速 P 计 算 天线 应达 到 的方 位角 和俯 仰 角 . 系统 快 速到 使 达一 个 初 步 对 准卫 星 的状 态 。第 二 部 分 为 跟踪 部 分 , 统 到达 初 步 位 置 后 , 据 信标 机进 行 来 回搜 系 根
电机分 别控制卫 星天 线 的方位 角和俯 仰角 。中央控 制器 采用 了 S C 2 5 6 S T 1 C A 0 2微 控 制器 , 微 控制 器 该 S C1C A 0 2是 S C公 司推 出 的一 款 高 性 T 2 5 6S T
能、 低功 耗 的单 片机 。具 有大 容量 、 非易失 性的程序 和数据存 储 空 间 ; 时片 内包 含 8路 1 高速 AD 同 O位 转 换 器 、 通 用 串行 口 、 2个 2路 P WM 可 以实 现 D A
车载卫星天线伺服控制系统的研究
e a t .T e a t n a c n r l rp o i e u c in fso a e x cl h n e n o t l r vd s f n t s o tr g ,me r ,a d c n a t -h n e s t l e . I c n y oe o mo y n a uo c a g at i s t a et
董 颢, 峻, 肖 柴小 波 , 晓娟 郑
( 汉理 工大 学机 电工 程学 院 , 湖北 武 汉 40 7 ) 武 30 0 摘 要 : 用 简单 实用可 靠的机 械 系统 , 利 综合 运 用 电子 罗盘 、 置传 感 器等现代 传 感装置 , 用单 片机 的 位 利 优 良控制 功 能 , 计 了车载 卫 星天 线伺服 控 制 系统 , 设 实现 了快速 准确 对 星。天 线控 制 器有储存 记 忆 自动
星 就成 为衡 量车 载 卫 星站 应 用 性 能 的 重要 指 标 之 一 。
与之通信 的卫星 , 建立通信信道 的过程。对于地球同 步卫 星来 讲 , 只要 地球 站位 置确定 以后 , 节 天线 的俯 调 仰 角和 方位 角就 可 以完 成 对 星 , 此基 础 上 再 调 整 馈 在 源极 化 方 向就 可 以使 天线 系统效 果达 到最 佳 … 。 自动对星是指在没有专用仪器和专业人员参与的 情况 下 , 根据使 用 者输 入 的对星需 求信 息 , 自动采集 对
0 引 言
近 年来 , 采用ห้องสมุดไป่ตู้小 口径 天 线 的车 载 卫 星 天 线得 到越
非 常适合 部 队 、 野外 作业 及 流动单 位使 用 。
: :
・
1 自动对 星原 理
所 谓对 星 , 是将 卫 星 天 线 的 主 波束 中心 对 准 要 就
车载卫星通信系统振动设计与分析[VIP上传]
![车载卫星通信系统振动设计与分析[VIP上传]](https://img.taocdn.com/s3/m/30cc2b6a27d3240c8447efcc.png)
车载卫星通信系统振动设计与分析摘要:介绍了车载卫星通信系统振动产生的原因,并结合振动理论,着重分析了进行车载卫星通信系统振动设计的途径与方法,有助于提高系统的抗振能力。
关键词:固有频率;结构谐振;加固设计;振动隔离;振动试验1前言车载卫星通信系统主要由三部分组成:一是前端天线系统设备,包括天线、馈线、以及天线座与传动系统;二是电子设备部分,包括接收、发射和信道等;三是运输载体和系统保障设备,包括车辆、方舱、电源和空调等。
这些设备在运输和使用过程中,由于内外因素的影响,会产生振动。
产生振动的原因主要有:·运输状态下,路面的不平整性引起各设备的上下、前后、左右多方向的振动;·工作状态下,天线系统的结构谐振;·工作状态下,风载造成的天线激振;·包括电源、空调、风机在内的各有源设备工作时的自主振动。
其中前两个因素对系统的电讯性能以及系统的稳定性影响最大,容易引起设备的破坏。
其现象大致分两类:·结构与工艺性破坏,如结构件的疲劳、断裂、磨损、连接件的松动、分离等;·功能与性能性破坏,包括工作失灵、性能降低以及超出容差范围等。
为此,对车载卫通系统的振动进行控制和分析十分必要。
由于保障设备一般由专业厂家提供,所以着重探讨天线系统与电子设备的抗振设计,并从振源的控制、结构的加固设计、设备的减振隔振、试验的验证等四方面进行分析。
2设计与分析2.1改善运输环境,控制振源在运输状态下,公路运输环境最为恶劣,因此,以公路运输环境来作为系统的运输环境。
公路运输环境是一种宽带振动,它是由于车体的支承、结构与路面平度的综合作用产生的。
车体在上下、前后、左右方向上同时存在不同的振动,而上下方向的振动量又最为严重〔1〕〔2〕。
所以,运输环境下着重分析设备上下方向的振动。
在公路运输状态下,振源的形成主要来自于路面,它是路面状况与行驶速度的函数〔3〕〔4〕。
在该状态下,系统的振动模型如图1所示。
漫谈车载卫星 电视接收系统
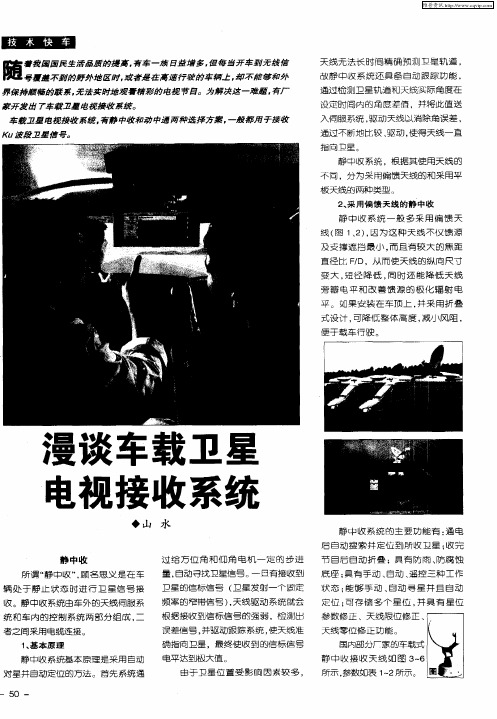
表 3 某 款 平 板 天 线 静 中 收 系统 主
要 参 数 表
控 制方式
操作方式
2 一 轴 。P 轴 4 G S定位
全 自动 / 手动 天线增 益 旁瓣 电平 3 2~3 .d 3. 48 B 2d 8B
控制箱
1 , 个 标准机箱 ( 7寸 J 1
方位范 围
俯 仰 范 围 工 作 电 源
6c 5m
3d 5B
车 ( U ) 多 用 途 车 ( V 、 闲 车 S V 、 MP ) 休 ( V 等多种车型使 用。 R )
线机械装 置两大 部分组成 。电控箱位 于车厢 内部 。 系统 的控制 中心 , 用 是 使
<5分钟
AC 2 V、 0 DC1 V、 A 2 0 6 W 2 6 天 线 尺 寸 4 c ×4 c 7m 7 m
系统时 ,直接在 其电控 箱面板上 输入 卫 星位 置参 数 或 用搜 索键 自动 搜 索 ,
即 可 准 确 对 星 ; 次 使 用 时 , 可 直 接 再 则 利 用系统 的记忆功 能进 行快速对 星 。
天线 无法 长 时间 精确 预测 卫星轨 道 ,
故 静中 收系统 还 具备 自动 跟踪功 能 ,
通过检测 卫星轨 道和天线实际角度在
设 定 时 间 内的 角 度 差 值 ,并 将 此 值 送
家 开 发 出 7 车载 卫 星 电视 接 收 系 统 。
车 载 卫 星 电视 接收 系统 I 静 中收 和 动 中 通 两 种 选 择 方 案 . 有 一般 都 用 于 接 收 Ku波段 卫 星 信 号 。
频 率 的 窄 带 信 号 )天 线 驱 动 系 统 就 会 ,
根 据 接 收 到信 标 信 号 的 强 弱 ,检 测 出
车载卫星通信 方案

车载卫星通信方案引言车载卫星通信技术是指通过车载终端与卫星之间建立连接,并借助卫星传输数据和进行通信的技术方案。
这项技术在交通运输、军事、应急救援等领域发挥着重要作用。
本文将介绍车载卫星通信方案的基本原理、主要应用场景以及技术发展趋势。
基本原理车载卫星通信方案的基本原理是通过车载终端与卫星建立双向通信链路,实现数据传输和通信功能。
车载终端通过天线接收来自卫星的信号,并将信号解码后进行处理。
同时,车载终端还可以将数据通过天线发送给卫星,从而实现与地面终端或其他车载终端的通信。
车载卫星通信方案通常采用全球范围卫星通信系统,如伽利略、格洛纳斯和GPS等。
这些卫星系统覆盖全球,具有较高的信号覆盖率和稳定性,可以提供可靠的通信服务。
车载终端一般搭载接收和发送设备,包括天线、调制解调器、控制单元等,用于接收和处理卫星信号。
主要应用场景交通运输领域在交通运输领域,车载卫星通信方案可以用于车辆定位、导航系统、车载视频监控等方面。
通过与卫星建立连接,可以实时获取车辆位置、速度等信息,并将这些数据传输到调度中心,实现对车辆的监控和管理。
此外,车载卫星通信方案还可以提供准确的导航服务,帮助驾驶员选择最佳的行驶路线。
军事领域在军事领域,车载卫星通信方案具有重要的战略意义。
通过与卫星的通信,可以实现联合作战、指挥调度、战场监测等功能。
军用车载卫星通信系统可以提供军事机密级别的数据传输服务,并具有抗干扰和保密性能。
应急救援领域在应急救援领域,车载卫星通信方案可以用于灾难发生时的信息传输和救援调度。
当灾害发生时,有时地面通信网络会受到损坏或中断,而车载卫星通信提供了一种独立的通信方式。
救援人员可以通过车载终端与卫星进行通信,发送救援请求或接收救援指示,提高救援工作的效率和准确性。
技术发展趋势车载卫星通信技术正朝着提高通信速度、增加传输容量和提升安全性能的方向不断发展。
以下是目前的技术发展趋势:1.高速通信技术: 现代车载卫星通信系统采用高速通信协议,如LTE、5G等,以满足大容量数据传输的需求。
飞行器车载卫星通信系统的设计与实现
飞行器车载卫星通信系统的设计与实现随着科技的不断发展和人们对通信需求的不断增强,车载卫星通信系统应运而生。
在现代社会中,飞行器作为一种重要的交通工具,其通信与导航系统更是人们生活中必不可少的一部分。
因此,飞行器车载卫星通信系统的实现是非常必要的。
本文将探讨飞行器车载卫星通信系统的设计与实现。
一、飞行器车载卫星通信系统简介飞行器车载卫星通信系统是指利用卫星通信技术,实现车载通信、导航和追踪,同时能在空中完成通信和导航功能的系统。
其具有范围广、受干扰程度低等基本特点。
该系统主要由卫星系统、地面控制站和用户终端三部分组成。
卫星系统是整个飞行器车载卫星通信系统的核心,其主要由卫星、地面站和空中终端三部分构成。
因此,设计一个可靠、高精度、高速率的卫星通信系统,成为了飞行器车载卫星通信系统的关键。
二、飞行器车载卫星通信系统设计(一)卫星设计卫星是整个通信系统中最核心的部分。
在卫星的设计中,需要关注以下几点:1. 卫星选择卫星选择需要考虑到卫星轨道、性能以及使用成本等方面。
其中,卫星轨道应尽可能保证其稳定,性能要求高,使用成本也是非常重要的考虑因素。
2. 卫星天线卫星天线的设计需要考虑到其覆盖范围、获取信号的稳定性和强度等方面。
因此,在卫星设计中,需要对天线进行优化设计和实现。
3. 卫星电源卫星电源的设计需要考虑到其能耗、供电方式和电源管理等方面。
(二)地面站设计地面站是整个通信系统的基础设施,主要用于管理和控制卫星。
在地面站的设计中,需要关注以下几点:1. 地面站选址地面站选择需要考虑到地形、气候、地理位置和通信环境等方面。
因此,在设计过程中,需要充分考虑这些因素,以保证地面站的稳定性和通信质量。
2. 地面站设计地面站的设计需要考虑到其设施、技术和人员等方面。
因此,在设计过程中需要选用先进的技术设备,并提供专业人员管理运营。
(三)用户终端设计用户终端是整个通信系统的接口,主要提供用户与系统的交互和通信功能。
基于ATmega1280的车载卫星天线控制系统
星天线 自动控 制 系统 是实 现该项 指标 的前 提条件 。
传统的车载卫星天线控制系统采用运算能力较 弱 的单 板机或 单片 机作 为 中央 处理 器 , 机 交互 能 人 力差 , 数据处理性能低- , 2 为此 , J 本文从 系统的实 时
数 据处理 能力 强。
关键 词 :A mea20 T g18 ;电子 罗盘 ; P 收器 ; 载卫 星天线 ;电机驱动 G S接 车
A o to y t m o e il a el e n e n a e i ATme a 2 0 c n r ls se f r v h ce s tl ts a t n a b s d O l i g 18
i cud st e e tr y tm ot r e a c i cu e a d d sg o e to a h f ncin lmo ul. I r v s n l e h n ie s se s fwa r ht t r e n e in c nc p fe c u to a d e tp o e
mo u e ,s c sG S,ee t n c c mp s ,moo r e,s tl t i a e e t n a d S n, ih a s d ls u h a P lc r i o a s o t rd i v a el e sg l c p i O o wh c o i n r o n l
摘
要: 在分析车载卫星天线控制系统的基础上,给出了一种基于 A m g18 T ea20微处理器的设计
方案 ,对各 关键 模块 :G S 电子 罗盘 、 电机 驱动 、卫 星信 号接收 等做 了详 细的 阐述 ,并给 出 了 P、 整 个 系统软 件 的构 架与各功 能模 块的设计 思 想 。通过检 测 证 明该 系统 智 能化 程度 高、操 作 方便 、
YM-520 车载移动卫星天线

YM-520车载移动卫星天线YM-520 车载卫星接收天线采用GPS+惯性测量+电扫描跟踪技术。
该天线具有增益高,高度低,跟踪能力强,稳定性好,抗颠簸等特点。
在时速300公里的路面也可以稳定接收。
外壳采用芳纶蜂窝材料,衰减小,强度高。
适合于SUV,房车,通讯车、火车等车型。
产品特性u技术先进,跟踪技术先进,采用GPS+惯性测量+信号跟踪可以快速准确的寻找到卫星,并稳定跟踪。
u输出画面清晰、稳定;可以接收MPEG2、MPEG4等格式的高清电视画面。
u产品接收范围广,只要落地场强大于49dBw的地区都可以接收。
u产品适应能力,抗抖动能力强,无论是颠簸或是崎岖的道路都不受影响。
u跟踪能力强,无论阁下的爱车是上坡,下坡,或者急转弯,都不受影响。
u信号恢复能力快,无论信号被树木,建筑,隧道等遮挡,离开后可以快速对星。
u安装方便,本品采用螺钉固定方式。
u双轴设计,阁下无需手动调节仰角,完全适应长途行驶。
u升级方便,无需更改硬件,只需刷新程序即可完成天线的升级、换星等操作。
技术参数项 目 参 数 项 目 参 数技术原理 GPS+惯性测量+电扫描跟踪 直径x高度 Φ90cm x 19 cm卫星频段 Ku波段同步卫星 重量 22 kg下行频率范围 10750 MHz~12750 MHz 输入电压 AC220 V极化方式 右旋 额定功率 30W卫星落地场强 ≥49 dBW 工作环境温度 -22℃~5 5 ℃天线增益 34 dBi 附件 控制器,同轴电缆水平跟踪方式 步进电机自控跟踪 外壳颜色 灰色仰角跟踪方式 步进电机自控跟踪 安装方式 螺钉固定跟踪速度 60度/秒 外壳材料 复合塑料安装效果图接线图接收范围图CCTV34568需要升级方可接收)CCTV-1 CCTV-7 CCTV-13 河北卫视 安徽卫视 新疆维语频道 CCTV-2 CCTV-8 CCTV-教育 山西卫视 江西卫视 新疆哈语频道 CCTV-3 CCTV-9 CCTV-音乐 辽宁卫视 山东卫视 新疆少儿 CCTV-4 CCTV-10 北京卫视 黑龙江卫视 河南卫视 CCTV-5 CCTV-11 天津卫视 江苏卫视 湖北卫视 CCTV-6CCTV-12东方卫视浙江卫视湖南卫视。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车载卫星天线系统车载卫星天线系统是车载的单向通信或双向通信的卫星通信天线,可与单颗或多颗Ku频段卫星通信的车载天线系统。
在运动中接收卫星信号的车载天线为“动中通”;在静止状态自动寻星,接收卫星信号的车载天线为“静中通”。
美国卫星通讯公司RaySat的SpeedRay3000车载卫星天线,可置于汽车顶部,支持卫星高速上网并能随时随地接收卫星电视信号。
1.车载卫星天线车载卫星天线解决了各种地面载体在移动中实时高频宽带大容量不间断地传递语音、数据、动态图象、传真等多媒体信息的难题,是通讯领域的一次重大突破。
车载卫星天线工作环境恶劣,天线高度、功耗、天线重量都受到限制,因此,在天线方案的选取中,采用高效率变焦距椭圆波束天线,以降低天线高度;天线反射面采用碳纤维材料成型,并采用了天线碳素或玻璃钢加罩设计,以减轻重量和降低伺服功耗。
如图6所示。
2.车载卫星天线组成及功能(1)天馈系统由等效0.35~1.2米椭圆波束天线和宽带TE21模馈源系统组成,它的主要任务是接收和发射通信载波。
(2)跟踪接收系统跟踪接收系统由LNA、跟踪下变频器和跟踪接收机等组成,它的主要任务是为伺服控制系统提供天线在仰角和方位角两方向偏离卫星的二路误差信号,经过环路调整后,使天线能始终跟踪卫星目标。
(3)天线伺服控制系统载车在行进中可能遇到各种路况,包括崎岖路面造成的车体颠摇和振动冲击;隧道、桥洞、树林、山体遮挡造成电波的中断等,都是静止接收站不会遇到的工作条件。
(4)天伺系统的功能①载车在不同方向、不同坡度的路面行驶,天伺系统的跟踪方位范围在0~N×360°、俯仰范围在0~90°;②载车在各种不同路况下行驶,伺服系统对路面和车速共同造成的载车颠摇与冲击的隔离度大,保证天线始终指向卫星;③遮挡消失后伺服系统再捕信号的最大捕获时间小。
载车进入信号中断区域后,伺服系统无信号跟踪卫星、通信中断;载车离开中断区,信号恢复后,立即恢复通信。
伺服系统重新使天线主波束对准卫星的最大捕获时间短;④信号中断后天线指向的记忆功能。
经过短时间的电波中断后,天伺系统不需要重新捕获,即可恢复通信;⑤天伺系统的跟踪精度,选择跟踪精度≤1/8天线波束宽度;⑥能耐受车型、车速与路况共同造成的冲击震动环境。
3.车载卫星接收系统主要特性(1)机动性强可实现动态中不间断宽带多媒体通信,具有很强的灵活性和机动性。
(2)接收信号能力强可以通过任何一颗地球同步卫星或空中平台,超越时间和空间的限制,实现点对点、点对多点的移动卫星多媒体通信,并能迅速将移动载体中多媒体数据瞬时传到世界各地或接收世界各地的多媒体信息。
(3)保密性强采用数字信息加密、用户加密和线路加密,增强了安全性和保密性。
(4)抗干扰能力强采用先进的跳频、前向纠错、扩频技术,增强抗干扰能力。
(5)信息容量大集动态图像、语音、数据、传真于一体,带宽可达广播级,完全满足不同用户的需要。
4.车载卫星天线系统主要性能技术标准,如表2车载卫星天线系统主要性能技术标准所列。
5.车载卫星天线系统应用范围(1)移动载体多媒体卫星通讯系统用于在移动的汽车、轮船、火车、飞机上实现实时高频宽带多媒体通信联系及接收新闻等电视节目,很好地解决了各种条件下的电视、通信保障难题;可以对远离中心地方的现场情况一览无余,并实时进行指挥调度和处理。
(2)电视移动转播系统直接将摄制的新闻实时地通过动中通发射到任何一颗地球同步卫星,再传到世界各地,充分体现了新闻的及时性和灵活性,很好地解决了马拉松竞赛、战地采访、实时直播、大型运动会、抢险、抗洪、救灾等电视主题实时移动转播的难题。
(3)运动中不间断网络中心该系统不需要任何电缆或光缆就可实现车、船等载体在移动中通过卫星实现不间断电视传输、通信传输,实现有线和无线接入。
该系统还可用于突发事件移动指挥中心、通信中心、调度中心、实时数据采集、处理、传输中心等。
(4)商用移动卫星通信系统实时将车内外监控的所有图象、语音信息迅速地传送给指挥监控中心,实时不间断地保持与监控中心图象、语音数据、传真等双向联系。
(5)部队移动卫星通信系统用于部队训练场,特别是战场等场所实时不间断地实现多媒体通信,使指挥中心迅速作出正确有效的决策。
(6)消防灭火卫星通信系统可以将火灾现场情况实时地通过卫星传送到指挥中心,对火灾现场有效地监控立即作出正确的判断和指挥等等。
6.车载卫星电视天线系统中国军工、航天和科研单位研发的多种车载卫星通信系统,已应用在部队通信、航空测量、航天探测、公安消防等事业,民用的已应用在电视直播、电视转播、电视传输、救灾测量、探矿考古、野外作业等领域。
如图7超薄的车载天线所示。
中国航天科技集团公司重庆巴山仪器厂生产的一种军民两用的车载卫星天线系统———动中通,达到国际先进水平。
该动中通系统集图像、话音、数据、传真于一体,可在移动中接收卫星电视,并可双向传送数字保密电话1路、语音电话4路、数据1路、数字G3或G4传真1路、视频2路、可视电话1路。
该动中通系统是能够在移动中实现连续不间续宽带多媒体通信的系统;可在移动中实现不间断窄带通信,能超越时间和空间的限制,迅速将移动载体中的多媒体信息瞬时传输。
该系统可实现点对点、点对多点、点对主站的移动卫星通信,大大提高用户在移动过程中的通信能力,满足各种应急通信系统移动条件下通信的需要。
该系统在一级路面上最大行驶速度为100公里/小时,通信传递速率可达2至5兆比特/秒。
该系统还可装备车辆、坦克、装甲车等军事车辆,如图8、图9所示。
7.动中通车载卫星电视接收系统(1)动中通车载天线动中通车载天线是车辆在运动中接收卫星电视和进行多媒体通信的天线。
动中通车载天线主要适用于室外通信作业、军事系统野外作业车辆以及相关部门野外工作车。
该天线需具有小型、携带方便、操作简单等特点。
①通信能力强:可以通过任何一颗地球同步卫星或空中平台,超越时间和空间的限制,实现点对点、点对多点移动卫星多媒体通信,并能迅速将移动载体中的多媒体数据瞬时传到世界各地和接收世界各地的多媒体信息。
汽车在高速公路上车速大于140Km/h(移动电话由于多普勒效应不能通信);坦克训练场路面行驶速度大于60 Km/h时,“动中通”仍能实时通信,图象4级以上。
②保密性强:采用数字信息加密、用户加密和群路加密,增强了安全性和保密性。
③信息容量大:集动态图像、语音、数据、传真于一体,带宽可达到2M~78M,完全能满足不同用户的需求。
④隐蔽性好:内藏式天线0.35~2.4m,保证机动性通信传播的隐蔽性。
主要技术指标对星精度:≤0.1°初始找星时间:≤1分钟方位跟踪范围:全方位或指定方位工作范围:卫星信号服务区工作频段:C、Ku、Ka频段通讯码速率:2M~78M行驶速度:≥100Km/ h工作环境温度:-45℃~+55℃平均无故障工作时间:≥3000 h车载卫星电视天线的自动跟踪系统利用激光制导和卫星姿态测量技术。
在车辆移动中清晰地接收卫星电视直播节目,要求天线增益很高,天线的波束就很窄,为高精度实时跟踪卫星,天线中心轴必须始终对准卫星,必须采用姿态测量技术。
(2)天线自动跟踪系统的组成与工作原理天线自动跟踪系统主要由:陀螺传感器、激光陀螺仪、16bit CPU的单片机、伺服系统(包括伺服驱动器和伺服马达)、横置偏馈或椭圆偏馈卫星接收天线、卫星电视接收机、电压/频率(V/F)转换模块、GPS 接收机模块等组成。
①陀螺传感器:测量汽车行驶的航向角。
陀螺传感器具有体积小、重量轻、功耗低、启动快等优点;随机漂移小(<1°/h),动态范围在±60°/s,标度因子误差<2%;能对陀螺传感器输出的汽车航向角变化的角速率进行积分,可得到汽车行驶中的航向角变化量,还可由CPU处理对数据进行编程。
代表产品:俄罗斯的全固态光纤陀螺传感器,美国的微电子机械系统(MEMS)的惯性陀螺传感器。
②激光陀螺仪:测量卫星天线俯仰角和横滚角变化量的传感器。
激光陀螺仪以NMEA格式,通过RS232串口提供俯仰角、横滚角和航偏变化量的输出。
激光陀螺仪具有响应快速,最高可达20Hz,响应时间为0.1s,航向精度为±0.5°,分辨率为0.1°,倾斜角(俯仰、横滚)在±40°,精度为±0.1°。
激光陀螺仪可在恶劣环境下长时间工作。
代表产品:美国霍尼威尔、利顿、斯佩里等公司的激光陀螺仪。
③伺服系统:伺服驱动器和伺服马达。
驱动器由微处理器来控制所有功能,并产生供逆变器专用的可调脉冲宽度PWM输出的ASIC芯片,用ASIC的输出来控制IGBT逆变器。
应用模块能同时进行单轴或多轴控制。
全数字化可以消除模拟量控制存在的漂移,还能承受启动时负载的冲击。
伺服马达可线性控制、角速度控制、拉伸速率。
代表产品:英国CT公司的微型交流无刷伺服马达和伺服驱动系统④GPS接收机模块:测量汽车当前经纬度定位坐标。
可控航向角范围在0~360°,俯仰角的范围在0~90°。
陀螺传感器长时间工作会有零点漂移和随机漂移,并会产生累积误差,影响天线的跟踪精度。
GPS模块每隔一两个小时后就要用GPS给出的汽车当前经纬度定位坐标;同时根据卫星电视接收机输出的自动增益控制(AGC)信号来校正一次天线的位置,修正它的误差并重新对准卫星。
如果汽车行驶在隧道、高层楼群、高架桥下以及密林等地段时,信号遮挡会使GPS定位失效,引入更大的误差。
这时就要采取推算定位(Dead Reckoning)进行自律导航。
有了GPS给出的汽车当前经纬度定位坐标,再利用同步卫星轨道的坐标,通过计算公式就可以推导出卫星天线应保持的航向角和俯仰角。
(3)单偏置抛物面天线单偏置抛物面天线的馈源及其支撑遮挡最小,有较大的焦距直径比f/D,天线的纵向尺寸变大,短径降低,降低天线旁瓣电平和改善馈源的极化辐射电平。
横向安装在汽车顶上有利于降低整体高度,折叠式设计可减小阻力,便于汽车行驶。