812(自动控制原理)考试大纲
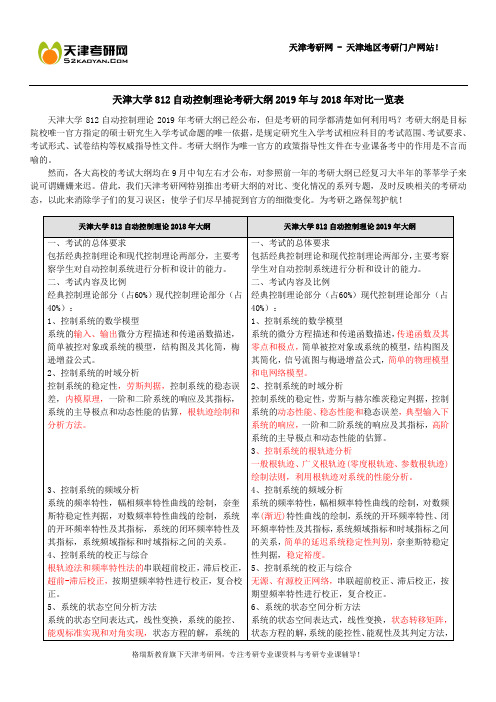
天津大学812自动控制理论考研大纲2019年与2018年对比一览表
天津大学812自动控制理论考研大纲2019年与2018年对比一览表
天津大学812自动控制理论2019年考研大纲已经公布,但是考研的同学都清楚如何利用吗?考研大纲是目标院校唯一官方指定的硕士研究生入学考试命题的唯一依据,是规定研究生入学考试相应科目的考试范围、考试要求、考试形式、试卷结构等权威指导性文件。
考研大纲作为唯一官方的政策指导性文件在专业课备考中的作用是不言而喻的。
然而,各大高校的考试大纲均在9月中旬左右才公布,对参照前一年的考研大纲已经复习大半年的莘莘学子来说可谓姗姗来迟。
借此,我们天津考研网特别推出考研大纲的对比、变化情况的系列专题,及时反映相关的考研动态,以此来消除学子们的复习误区;使学子们尽早捕捉到官方的细微变化。
为考研之路保驾护航!
以上是天津大学812自动控制理论2019年与2018年考研大纲的对比情况,从对比文件可以看出,天津大学812自动控制理论的考研大纲发生变化。
所以,报考该校的研友们要依据现状合理调整复习计划备考。
天津大学812自动控制理论考研资料请到天津考研网官网咨询查看。
自动控制原理考研大纲

《自动控制原理》考研大纲科目名称:控制理论适用专业:仿生装备与控制工程参考书目:《自动控制原理》第六版,胡寿松编,科学出版社;《自动控制理论》第二版,邹伯敏编,机械工业出版社;《现代控制理论基础》第二版,王孝武主编,机械工业出版社考试时间:3小时考试方式:笔试总分:150分考试范围:包括经典控制理论(不包含非线性部分)与现代控制理论两部分,经典控制理论内容占70%,现代控制理论内容占30%。
经典控制理论部分第一章绪论1. 掌握自动控制系统的工作原理、自动控制系统的组成与几种不同分类。
2. 重点掌握反馈的概念、基本控制方式、对控制系统的基本要求。
第二章线性系统的数学模型控制理论的两大任务是系统分析与系统设计,系统分析和设计中首先要建立被研究系统的数学模型。
本章主要给出古典控制理论使用的系统数学模型——传递函数的建立。
本章要求:1.掌握的概念:传递函数;极点、零点;开环传递函数、闭环传递函数、误差传递函数;典型环节的传递函数。
2.重点掌握建立电气系统、机械系统的微分方程和传递函数模型的方法。
3.重点掌握方框图化简或信号流图梅森增益公式获得系统传递函数的建模方法。
第三章控制系统时域分析根据研究系统采用的不同数学模型,分析方法是不同的,本章给出利用系统传递函数数学模型求取时间响应的系统时域分析法。
主要是分析系统的三大基本性能,即系统的稳(稳定性)、准(准确性)、快(快速性)。
稳定性是系统工作的必要条件;快速性和相对稳定程度(振荡幅度)是评价系统动态响应的性能指标;准确性是指系统稳态响应的稳态精度,用稳态误差来衡量,需注意:讨论的稳态误差是指由输入信号和系统结构引起的系统稳态时的误差。
本章要求:1.掌握的概念:稳定性;动态(或暂态)性能指标(最大超调量、上升时间、峰值时间、调整时间);稳态(静态)性能指标(稳态误差);一阶、二阶系统的主要特征参量;欠阻尼、临界阻尼、过阻尼系统特点;主导极点。
2.重点掌握系统稳定性判别(Routh判据);稳态误差终值计算(包括三个稳态误差系数的计算);二阶系统动态性能指标计算。
851自动控制原理考试大纲
851自动控制原理考试大纲
自动控制原理是控制工程领域中的重要基础课程,它涉及到系
统建模、控制理论、信号处理等内容。
根据不同学校或教师的教学
安排,考试大纲可能会有所不同,但一般包括以下内容:
1. 基本概念和术语,包括控制系统的定义、分类、基本组成部分,以及控制系统的性能指标等。
2. 信号与系统,包括连续时间信号与离散时间信号,线性时不
变系统的概念,系统的冲激响应、阶跃响应等。
3. 传递函数与状态空间,包括传递函数的定义、性质,状态空
间模型的建立与应用。
4. 闭环控制系统,包括闭环控制系统的基本原理、稳定性分析、根轨迹法、频域分析等。
5. 控制器设计,包括比例积分微分(PID)控制器的设计方法、校正器设计、状态反馈控制等。
6. 系统稳定性分析,包括极点分布、系统稳定性的判据、稳定裕度等。
7. 频域分析,包括频域响应、频域设计等。
8. 数字控制系统,包括采样定理、离散系统的稳定性分析、数字控制器设计等。
9. 控制系统的应用,包括控制系统在工程实践中的应用、案例分析等。
在考试中,学生可能会面对选择题、计算题、分析题等不同类型的题目,要求掌握理论知识并能够灵活运用到实际问题中。
考试大纲通常会明确要求学生掌握的知识点和能力,帮助学生有针对性地复习和备考。
希望以上内容能够帮助你更好地准备自动控制原理的考试。
天津大学自动化考研初试大纲(812自动控制理论)

天津大学硕士研究生入学考试业务课初试考试大纲课程编号:812 课程名称:自动控制理论一、考试的总体要求包括经典控制理论和现代控制理论的基础部分,主要考察学生对自动控制系统进行分析和综合设计的能力。
二、考试内容及比例经典控制理论部分(占80%):1、控制系统的数学模型控制系统输入、输出微分方程模型,线性系统的叠加原理和齐次性,非线性系统在静态工作点处的线性化,传递函数,结构图及其化简,梅逊增益公式。
2、控制系统的分析方法控制系统的稳定性,劳斯判据,一阶系统和二阶系统的响应,一阶系统和二阶系统阶跃响应的性能指标,系统的主导极点及高阶系统的响应,控制系统的稳态误差,控制系统的根轨迹和绘制方法,零度根轨迹和广义根轨迹,控制系统的根轨迹分析,控制系统的频率特性,极坐标图和伯德图,奈奎斯特稳定判据和对数奈奎斯特稳定判据,开环及闭环系统的频域性能指标。
3、控制系统的综合设计控制系统的时域性能指标和频域性能指标及其关系,PID控制器,超前校正,滞后校正,超前-滞后校正,反馈校正,按期望频率特性进行校正。
4、离散时间系统采样开关和零阶保持器,脉冲传递函数的概念,开环和闭环系统的脉冲传递函数,离散时间系统的稳定性分析,极点位置和暂态响应的关系,稳态误差计算,离散时间系统的根轨迹分析与设计。
5、非线性控制系统非线性系统的特征,相平面的概念,奇点及其分类,极限环及其分类,非线性系统的相平面分析方法,非线性系统的描述函数分析方法。
现代控制理论部分(占20%):状态方程模型的建立,非线性状态空间表达式在静态工作点附近的线性化,传递函数的标准实现,线性变换,状态方程的解,控制系统的可控性和可观性及其判定方法,状态观测器设计,单输入、单输出系统的极点配置和状态反馈。
三、试卷类型问答题,分析计算题。
四、考试形式及时间笔试,三小时。
五、主要参考教材1. 自动控制原理,机械工业出版社,李光泉2. 自动控制原理,国防工业出版社,胡寿松3.线代控制理论,机械工业出版社,刘豹4.自动控制原理,清华大学出版社,吴麟。
天津大学812 自动控制原理课件 第1章 自动控制的一般概念

四、教学安排
• 讲课48课时,实验8课时
• 第一章 自动控制的一般概念
• 第二章 控制系统的数学模型
(4课时)
(8课时)
• 第三章 线性系统的时域分析法
• 第四章 • 第五章 • 第六章 线性系统的根轨迹法 线性系统的频域分析法 线性系统的校正方法
(10课时)
(6课时) (10课时) (10课时)
按系统性能可分为:
线性系统和非线性系统;连续系统和离散系统; 定常系统和时变系统;确定性系统和不确定性系统;
线性连续控制系统:
dn d n 1 d a 0 n c(t ) a1 n 1 c(t ) a n 1 c(t ) a n c(t ) dt dt dt dm d m 1 d b0 m r (t ) b1 m 1 r (t ) bm 1 r (t ) bm r (t ) dt dt dt
1-4对自动控制系统的基本要求
一、基本要求:稳定性、快速性和准确性,即稳、快、 准。 • 稳定性:保证系统正常工作的先决条件。被控量偏离 期望值后,经过一个过渡过程,以回到期望值状态。 线性系统的稳定性由系统的结构参数决定。
• 快速性: 系统过渡时间的长短和过渡形式提出要求。 即系统的动态性能。 • 准确性:稳态误差大小提出要求。
• 现代控制理论:发展于20世纪60年代初期。
–特点:主要研究具有高性能、高精度的多变 量变参数系统的最优控制问题。采用以状态 为基础的时域方法。
• 模糊控制技术:发展于20世纪80年代,基于
模糊数学、模糊推理方法
三、反馈控制原理
• 反馈:系统输出量送回到输入端,与输 入信号相比较产生偏差信号的过程。 利用反馈进行控制的系统称为反馈控制 系统。
812(自动控制理论)考试内容范围

812(自动控制理论)考试内容范围【一】说明要紧内容包括经典操纵理论和现代操纵理论两部分,试题的比例为:经典操纵理论部分占比70%,现代操纵理论部分占比30%。
要紧参考书:自动操纵理论〔第4版〕,夏德钤,翁贻方,北京:机械工业出版社,2018现代操纵理论,闫茂德,高昂,胡延苏,北京:机械工业出版社,2016现代操纵理论〔第3版〕,刘豹,唐万生,北京:机械工业出版社,2017【二】考试内容经典操纵理论部分的差不多内容和要求:1、引论理解开环操纵和闭环操纵的区别,了解反馈操纵理论的研究对象和方法。
掌握自动操纵系统的差不多概念、术语,了解自动操纵系统的组成和分类,及对自动操纵系统稳、准、快三方面的差不多要求。
2、线性系统的数学模型一般了解数学模型的概念、表达方式,建模的方法;能够列写一般物理系统的微分方程;熟悉拉氏变换的定义、性质,记住常见的简单时间函数的拉氏变换式,能依照拉氏变换的性质求解较复杂时间函数的拉氏变换式,会求拉氏反变换;理解传递函数的概念及典型环节的传递函数。
重点掌握操纵系统的方框图及方框图的化简方法,能用梅逊公式求取系统传递函数。
3、线性系统的时域分析了解操纵系统的典型输入信号;了解线性定常系统的时域响应组成,熟悉操纵系统暂态响应性能指标的定义;熟悉一阶系统的暂态响应及性能指标;熟悉二阶系统的暂态响应分析及其与极点之间的关系,重点掌握二阶系统的瞬态响应指标与参量ζ、ωn间的关系及计算;一般了解高阶系统的暂态响应和闭环主导极点的概念;了解稳定性的概念,掌握线性定常连续系统稳定的充要条件;重点掌握判断稳定性的Routh代数判据及应用,对Hurwitz判据有一般了解;了解稳态误差的概念;重点掌握给定稳态误差终值的计算及减小稳态误差的方法。
4、线性系统的根轨迹分析了解根轨迹的概念。
重点掌握绘制常规负反馈系统根轨迹的差不多条件和差不多规那么,能依照的系统开环传递函数绘制闭环系统的根轨迹,也能由的闭环系统的根轨迹〔起点和终点〕写出系统的开环传递函数,一般了解参量根轨迹的绘制及增加开环零极点对根轨迹的妨碍。
天津大学812自动控制理论考研资料+经验
天津大学812自动控制理论考研资料+经验812自动控制理论是天津大学电气与自动化工程学院考研唯二的两门专业课之一,复习起来是有一定难度的。
天津考研网邀请到了以高分被录取的考研专业课是自动控制理论的研究生学长为我们录制了一份免费的专业解析视频“天津大学812自动控制理论考研经验心得”,可直接搜索。
该视频是由曾以高分被天津大学自动化学院控制科学与工程专业录取的学长学姐们为广大考研小伙伴们倾力打造的专业课复习指导视频。
使得小伙伴们对自动控制理论专业课考试有一个总体的认识。
从而在开始复习专业课前能有一个清晰的思路,对考试有一个宏观的把握。
天津考研网同时还为报考天津大学812自动控制理论的同学们整理了一些专业课复习资料以及学长学姐们的复习经验,希望能对大家的复习有所帮助。
下面天津考研网就为考研小伙伴们详细说说812自动控制理论的复习。
<一>天津大学812自动控制理论考研主要参考教材1、自动控制原理,科学出版社,夏超英2、自动控制原理,科学出版社,胡寿松3、现代控制理论,机械工业出版社,刘豹4、现代控制理论,科学出版社,夏超英专业课复习基础阶段需要将参考教材看1-2遍,达到基础知识无盲点,通过天津大学本科课件、笔记、讲义等资料配合参考书使用,可以更好的把握天大本科授课重点。
但对于跨考生来说这些资料的收集是有一定难度的。
针对这种情况天津考研网组织多名一线大学老师及过去几年在天津大学研究生初试中专业课取得高分的考生共同编写及整理了《天津大学812自动控制理论考研红宝书》,来帮助报考天津大学理学院的专业课基础不扎实,对院系信息了解较少的同学复习。
<二>天津大学812自动控制理论考研参考书《天津大学812自动控制理论考研红宝书》已于编写者签订资料保真转让协议,各位考研同学可放心使用参考!包括以下几方面重要内容:1、自动化学院及学科介绍:本校研究生对天津大学自动化专业详细介绍:主要内容包括学院概况,详细的导师介绍,包括不同方向导师的专业研究方向和兴趣,以及研究成果等等。
西安石油大学812自动控制原理2020年考研专业课初试大纲
(812)自动控制原理考试大纲
一、考察目标
理解自动控制系统分析与设计的基本方法和理论。
掌握自动控制系统建模的方法,掌握时域响应法、频域法、根轨迹法及状态空间法的分析方法,掌握线性连续定常系统的设计方法,掌握离散控制系统和非线性控制系统的分析方法等。
二、考试主要内容
自动控制系统的建模;时域响应法、频域法、根轨迹法及状态空间法的系统分析;系统的频率域法设计和状态空间法设计;离散控制系统的建模与分析;非线性控制系统的描述函数法和相平面法分析。
三、考试形式及试卷结构
考试采取闭卷考试的形式,卷面分值为150分。
试卷结构以综合题为主。
【免费下载】昆明理工大学考试大纲816自动控制原理
第五章 频率法 内容: 5.1 频率特性的基本概念 5.2 频率特性的表示方法 5.3 典型环节的频率特性 5.4 系统开环频率特性的绘制 5.5 用频率法分析控制系统的稳定性 5.6 系统暂态特性和开环频率特性的关系 5.7 闭环系统频率特性 5.8 系统暂态特性和闭环频率特性的关系 重点掌握:
2.2 非线性数学模型线性化 2.3 传递函数 2.4 系统传递函数和结构图的等效变换 2.5 信号流图 重点掌握:
1、熟练掌握由系统微分方程组建立动态结构图的方法; 2、熟练掌握结构图与信号流图变换的基本法则及梅逊公式应用; 3、正确理解由传递函数派生出来的系统开环传递函数、闭环传递函数、对控制信号和 对干扰的传递函数、误差传递函数以及典型环节的传递函数等概念与表示形式。 一般掌握: 正确理解传递函数的定义、性质及意义。 了解: 动态微分方程建立的一般方法及小偏差线性化的概念与方法。
6、明确终值定理的使用条件,正确理解稳态误差的定义和重视误差的规律,能熟练掌 握稳态误差的计算。 一般掌握:
1、正确理解单位阶跃响应、单位斜坡响应和单位脉冲响应及其关系; 2、典型初始状态。 了解: 理解系统结构不稳定的本质。
第四章 根轨迹法 内容: 4.1 根轨迹法的基本概念 4.2 根轨迹的绘制法则
昆明理工大学硕士研究生入学考试《自动控制原理》考试大纲
适用专业:080402 测试计量技术及仪器 081101 控制理论与控制工程 081102 检测技术与 自动化装置 081103 系统工程 081104 模式识别与智能系统 081105 导航、制导与控制 085203 仪器仪表工程 085210 控制工程
西安交通大学硕士研究生入学考试科目主要参考书
高等教育出版社
2004 年第六版 2008 年第二版
《生物化学》
查锡良
人民卫生出版社 2008 年第七版
722 量子力学
《量子力学教程》
周世勋
人民教育出版社 1979 年版
西安交通大学 硕士研究生入学考试科目主要参考书
邮政编码:710049
地部门:研究生招生办公室
电话:029-82668329
联 系 人:肖胜利
考试科目代码及名称
参考书名称
723 物理化学
《物理化学》上、下册
作者
付献彩
出版社
高等教育出版社
版次
2002 年
备注
724 中共党史
《中国共产党七十年》
胡绳
《工业设计思想基础》
702 数学分析
《数学分析》
陈高翔
贺忠厚 邓晓兰 铁卫 冯宗宪 (美)萨尔瓦多 樊秀峰 张迈曾主编
李彬主编
中国经济出版社 西安交通出版社 西安交大出版社 西安交大出版社
高等教育出版社 清华大学出版社 西安交大出版社 西安交通大学出版 社 新华出版社
2004 年
2007 年 2007 年 2007 年 2011 年 2010 年 2003 年
方梦之
青岛出版社
2003 年版
《医学英汉互译技巧与实践》
罗磊
人民军医出版社 2004 年版
《医学专业英语》阅读 1-2 册
白永权
人民卫生出版社 2000 年版
《英汉翻译教程》
杨士焯
北京大学出版社 2006 年版
359 日语翻译基础
《现代日汉翻译教程》
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
812(自动控制原理)考试大纲
【一】差不多要求
掌握操纵系统分析和综合差不多方法,要紧内容有传递函数和信号流图等数学模型的建立;系统稳定性、动态性能、稳态性能的时域分析;频域法和根轨迹法;系统串联校正的设计方法;线性离散系统的分析;系统状态空间建模及其求解;系统可控性和可观测性;线性定常系统状态反馈及观测器设计;李雅普诺夫稳定性理论。
【二】考试范围
1、自动操纵的一般概念
〔1〕自动操纵系统的定义、构成;
〔2〕自动操纵系统的差不多操纵方式;自动操纵系统的分类;
〔3〕对操纵系统的差不多要求;
2、操纵系统的数学模型
〔2〕传递函数的定义、性质及典型环节的传递函数;
〔3〕信号流图的组成、建立及梅森增益公式;
〔4〕闭环系统的传递函数:输入量及扰动量作用下的传递函数、误差传递函数。
3、线性系统的时域分析法
〔1〕一阶系统动态性能;
〔2〕二阶系统的动态性能:典型二阶系统的数学模型、欠阻尼阶跃响应、二阶系统的动态性能指标、二阶系统性能的改善;
〔3〕操纵系统的稳定性分析及代数稳定判据;
〔4〕操纵系统的稳态性能分析:稳态误差的定义、系统类型、稳态误差分析与静态误差系数。
4、线性系统的根轨迹法
〔1〕根轨迹方程:幅值条件和相角条件;
〔2〕180度根轨迹作图的一般规那么、典型的零、极点分布及其相应的根轨迹;
〔4〕系统性能分析:稳定性分析、增加零、极点对根轨迹的妨碍、利用主导极点可能系统的性能指标;
5、线性系统的频域分析法
〔1〕频率特性;
〔2〕典型环节与开环系统的频率特性;
〔3〕奈奎斯特稳定判据及应用;
〔4〕稳定裕度;
6、线性系统的校正法
〔1〕校正装置:超前、滞后网络的特性;
〔2〕系统校正的频率响应法:超前、滞后校正设计;
〔3〕PID操纵器:操纵法那么及对系统性能的妨碍。
7.线性离散系统的分析
(1)信号采样和保持;
(2)离散系统数学模型:差分方程和脉冲传递函数;
(3)离散系统稳定性及稳定性判据;
(4)离散系统稳态误差及动态性能分析;
8.线性系统的状态空间分析与综合
(1)线性系统的状态空间描述:建立、转换、标准型;线性系统的运动分析---状态方程的解;
(2)线性系统的可控性和可观测性;
(3)线性定常系统的线性变换;
(4)线性定常系统的状态反馈极点配置和全维状态观测器设计;
(5)李雅普诺夫稳定性分析。